
Abstract
In the context of pointwise contact interaction between bodies, a formulation based on surface-to-surface description (master–master) is employed. This leads to a four-variable local contact problem, which solution is associated with general material points on contact surfaces, where contact mechanical action-reaction are represented. We propose here a methodology that permits, according to necessity, a selective dimension reduction of this local contact problem. Thus, the formulation includes curve-to-curve, point-to-surface, curve-to-surface or other contact descriptions as particular degenerations of the surface-to-surface approach. This is done by assuming convective coordinates in the original local contact problem. An operator for performing the so-called “local contact problem degeneration” is presented. It modifies automatically the dimension of the local contact problem and related requirements for its solution. The proposed method is particularly useful for handling singularity scenarios. It also creates a possibility for representing conformal contact by pointwise actions on a non-uniqueness scenario. We present applications and examples that demonstrate benefits for beam-to-beam contact. Ideas and developments, however, are general and may be applied to other geometries of contacting bodies.




















Similar content being viewed by others

References
Wriggers P (2002) Computational contact mechanics. Wiley, West Sussex
Laursen TA (2003) Computational contact and impact mechanics fundamentals of modeling interfacial phenomena in nonlinear finite element analysis. Springer, Berlin
Francavilla A, Zienkiewicz OC (1975) A note on numerical computation of elastic contact problems. Int J Numer Methods Eng 9:913–924
Stadter JT, Weiss RO (1979) Analysis of contact through finite element gaps. Comput Struct 10:867–873
Wriggers P, Rust WT, Reddy BD (2016) A virtual element method for contact. Comput Mech 58(6):1039–1050
Wriggers P, Van TV, Stein E (1990) Finite-element-formulation of large deformation impact-contact problems with friction. Comput Struct 37:319–333
Simo JC, Wriggers P, Taylor RL (1985) A perturbed Lagrangian formulation for the finite element solution of contact problems. Comput Methods Appl Mech Eng 50:163–180
Bandeira AA, Pimenta PM, Wriggers P (2004) Numerical derivation of contact mechanics interface laws using a finite Element approach for large 3D deformation. Int J Numer Meth Eng 59:173–195
Bathe KJ, Chaudhary AB (1985) A solution method for planar and axisymmetric contact problems. Int J Numer Methods Eng 21:65–88
Puso MA (2004) A 3D mortar method for solid mechanics. Int J Numer Methods Eng 59(3):315–336
Puso MA, Laursen TA (2004) A mortar segment-to-segment contact method for large deformation solid mechanics. Comput Methods Appl Mech Eng 193:601–629
Fischer KA, Wriggers P (2005) Frictionless 2d contact formulations for finite deformations based on the mortar method. Comput Mech 36:226–244
De Lorenzis L, Wriggers P, Zavarise G (2012) A mortar formulation for 3D large deformation contact using NURBS-based isogeometric analysis and the augmented Lagrangian method. Comput Mech 49(1):1–20
Popp A et al (2010) A dual mortar approach for 3D finite deformation contact with consistent linearization. Int J Numer Meth Eng 83:1428–1465
Popp A, Gee WM, Wall WA (2011) Finite deformation contact based on a 3D dual mortar and semi-smooth newton approach. In: Zavarise G, Wriggers P (eds) Trends in computational contact mechanics. Springer, Berlin, pp 57–77
Wriggers P, Zavarise G (1997) On contact between three-dimensional beams undergoing large deflections. Commun Numer Methods Eng 13:429–438
Zavarise G, Wriggers P (2000) Contact with friction between beams in 3-D space. Int J Numer Methods Eng 49:977–1006
Gay Neto A, Pimenta PM, Wriggers P (2015) Self-contact modeling on beams experiencing loop formation. Comput Mech 55(1):193–208
Litewka P, Wriggers P (2002) Frictional contact between 3D beams. Comput Mech 28:26–39
Litewka P (2007) Hermite polynomial smoothing in beam-to-beam frictional contact. Comput Mech 40:815–826
Konyukhov A, Schweizerhof K (2010) Geometrically exact covariant approach for contact between curves. Comput Methods Appl Mech Eng 199:2510–2531
Konyukhov A, Schweizerhof K (2013) Computational contact mechanics. Springer, Berlin
Gay Neto A, Pimenta PM, Wriggers P (2014) Contact between rolling beams and flat surfaces. Int J Numer Methods Eng 97:683–706
Zavarise G, Wriggers P (1998) A segment-to-segment contact strategy. Math Comput Model 28(4–8):497–515
Zavarise G, de Lorenzis L (2009) A modified node-to-segment algorithm passing the contact patch test. Int J Numer Methods Eng 79:379–416
Gay Neto A, Pimenta PM, Wriggers P (2016) A Master-surface to master-surface formulation for beam to beam contact. Part I: frictionless interaction. Comput Methods Appl Mech Eng 303:400–429
Gay Neto A, Pimenta PM, Wriggers P (2017) A master-surface to master-surface formulation for beam to beam contact. Part II: frictional interaction. Comput Methods Appl Mech Eng 319:146–174
Litewka P (2013) Enhanced multiple-point beam-to-beam frictionless contact finite element. Comput Mech 52:1365–1380
Litewka P (2015) Frictional beam-to-beam multiple-point contact finite element. Comput Mech 56:243–264
Durville D (2012) Contact-friction modeling within elastic beam assemblies: an application to knot tightening. Comput Mech 49:687–707
Durville D (2010) Simulation of the mechanical behaviour of woven fabrics at the scale of fibers. Int J Mater Form 3(Suppl. 2):S1241–S1251
Chamekh M, Mani-Aouadi S, Moakher M (2014) Stability of elastic rods with self-contact. Comput Methods Appl Mech Eng 279:227–246
Chamekh M, Mani-Aouadi S, Moakher M (2009) Modeling and numerical treatment of elastic rods with frictionless self-contact. Comput Methods Appl Mech Eng 198:3751–3764
Meier C, Popp A, Wall WA (2016) A finite element approach for the line-to-line contact interaction of thin beams with arbitrary orientation. Comput Methods Appl Mech Eng 308:377–413
Meier C, Wall WA, Popp A (2017) A unified approach for beam-to-beam contact. Comput Methods Appl Mech Eng 315(1):972–1010
Konyukhov A (2015) Geometrically exact theory of contact interactions—applications with various methods FEM and FCM. J Appl Math Phys 3:1022–1031
Gay Neto A, Pimenta PM, Wriggers P (2018) Contact between spheres and general surfaces. Comput Methods Appl Mech Eng 328:686–716
Gay Neto A (2017) Giraffe user’s manual—generic interface readily accessible for finite elements. Disponivel em http://sites.poli.usp.br/p/alfredo.gay/. Accessed 25 Jan 2019
Gay Neto A (2016) Dynamics of offshore risers using a geometrically-exact beam model with hydrodynamic loads and contact with the seabed. Eng Struct 125:438–454
Acknowledgements
The first author acknowledges FAPESP (Fundação de Amparo à Pesquisa do Estado de São Paulo) under the Grant 2016/14230-6 and CNPq (Conselho Nacional de Desenvolvimento Científico e Tecnológico) under the Grant 304680/2018-4.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Surface parameterization of a beam with super elliptical cross section
Appendix: Surface parameterization of a beam with super elliptical cross section
The here presented parameterization was taken from [26], where the reader finds more detailed explanations. Here it is presented for self-containing of present work.
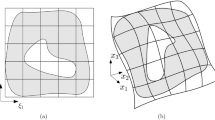
Let \( {\mathbf{x}} \) represent the beam axis position. Vector \( {\mathbf{a}} \) is orthogonal to \( {\mathbf{x}} \) at each beam cross section and connects the beam axis to the cross-section boundary. It is proposed the following parameterization for a surface \( {\Gamma } \):
where \( {\upzeta } \) describes a convective coordinate along the beam axis direction and \( {\uptheta } \) describes a convective coordinate along circumferential direction in the plane of the cross section. The vector \( {\mathbf{a}}\left( {{\upzeta },{\uptheta }} \right) \) describes the cross-section shape in its local orientation xy, as seen in Fig. 21. We employed a linear interpolation for beam axis, between two extreme nodes located at \( {\mathbf{x}}_{\text{A}} \) and \( {\mathbf{x}}_{\text{B}} \), such that:

Cross-sections are chosen to have super elliptical shapes, described by
where \( {\text{a}} \) and \( {\text{b}} \) are semi-axis. The choice for \( {\text{a}} \), \( {\text{b}} \) and the exponent \( {\text{n}} \) makes this a versatile choice to recover circular, elliptical or almost-rectangular cross-sections. Figure 22 shows some examples.

Examples for super elliptical cross sections with a = 2b and a n = 2, b n = 4, c n = 15 (taken from [26])
At reference configuration, one may describe each cross section by:
where
With that, the final form for \( {\Gamma }\left( {{\upzeta },{\uptheta }} \right) \) is expressed including \( {\mathbf{Q}}_{\text{A}} \) and \( {\mathbf{Q}}_{\text{B}} \) as the rotation tensors for each beam extreme node:
Rights and permissions
About this article

Cite this article
Gay Neto, A., Wriggers, P. Computing pointwise contact between bodies: a class of formulations based on master–master approach. Comput Mech 64, 585–609 (2019). https://doi.org/10.1007/s00466-019-01680-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-019-01680-9