
Abstract
This paper presents a new variational principle in finite elastostatics applicable to arbitrary elastic solids that may contain constitutively rigid spatial domains (e.g., rigid inclusions). The basic idea consists in describing the constitutive rigid behavior of a given spatial domain as a set of kinematic constraints over the boundary of the domain. From a computational perspective, the proposed formulation is shown to reduce to a set of algebraic constraints that can be implemented efficiently in terms of both single-field and mixed finite elements of arbitrary order. For demonstration purposes, applications of the proposed rigid-body-constraint formulation are illustrated within the context of elastomers, reinforced with periodic and random distributions of rigid filler particles, undergoing finite deformations.








Similar content being viewed by others
Notes
For instance, the shear modulus of a typical rubber is in the order of 0.1 MPa while the shear modulus of carbon black is in the order of 10 GPa.
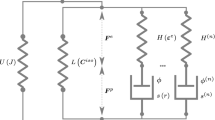
We note that different mixed variational principles which do not require any splitting of the deformation gradient into deviatoric (\(\overline{\mathbf{F }}\)) and volumetric (\(\mathrm{det}\,\mathbf F \)) parts are also available [5].
References
Bonet J, Wood RD (2008) Nonlinear continuum mechanics for finite element analysis. Cambridge University Press, Cambridge
Brink U, Stein E (1996) On some mixed finite element methods for incompressible and nearly incompressible finite elasticity. Comput Mech 19(1):105–119
Chang TYP, Saleeb AF, Li G (1991) Large strain analysis of rubber-like materials based on a perturbed lagrangian variational principle. Comput Mech 8(4):221–233
Chen JS, Han W, Wu CT, Duan W (1997) On the perturbed Lagrangian formulation for nearly incompressible and incompressible hyperelasticity. Comput Methods Appl Mech Eng 142(3):335–351
Chi H, Talischi C, Lopez-Pamies O, Paulino GH (2015) Polygonal finite elements for finite elasticity. Int J Numer Methods Eng 101:305–328
Cook RD, Malkus DS, Plesha ME, Witt RJ (2002) Concepts and applications of finite element analysis, 4th edn. Wiley, New York
Dunavant D (1985) High degree efficient symmetrical gaussian quadrature rules for the triangle. Int J Numer Methods Eng 21(6):1129–1148
Goudarzi T, Spring DW, Paulino GH, Lopez-Pamies O (2015) Filled elastomers: a theory of filler reinforcement based on hydrodynamic and interphasial effects. J Mech Phys Solids. 80:37–67
Hughes TJR (2012) The finite element method: linear static and dynamic finite element analysis. Courier Dover Publications, Mineola
Kouznetsova V, Geers M, Brekelmans W (2004) Multi-scale secondorder computational homogenization of multi-phase materials: a nested finite element solution strategy. Comput Methods Appl Mech Eng 193(48):5525–5550
Leblanc JL (2010) Filled polymers: science and industrial applications. CRC Press, Boca Raton
Lopez-Pamies O (2010) An exact result for the macroscopic response of particle-reinforced Neo-Hookean solids. J Appl Mech 77(2):021016
Lopez-Pamies O, Goudarzi T, Danas K (2013) The nonlinear elastic response of suspensions of rigid inclusions in rubber: II—a simple explicit approximation for finite-concentration suspensions. J Mech Phys Solids 61:19–37
Luenberger DG (1973) Introduction to linear and nonlinear programming, vol 28. Addison-Wesley, Reading
Michel J-C, Lopez-Pamies O, Ponte Castañeda P, Triantafyllidis N (2010) Microscopic and macroscopic instabilities in finitely strained fiber-reinforced elastomers. J Mech Phys Solids 58(11):1776–1803
Miehe C (2002) Strain-driven homogenization of inelastic microstructures and composites based on an incremental variational formulation. Int J Numer Methods Eng 55(11):1285–1322
Miehe C, Lambrecht M (2003) A two-scale finite element relaxation analysis of shear bands in non-convex inelastic solids: small-strain theory for standard dissipative materials. Comput Methods Appl Mech Eng 192(5):473–508
Moraleda J, Segurado J, LLorca J (2009) Finite deformation of incompressible fiber-reinforced elastomers: a computational micromechanics approach. J Mech Phys Solids 57(9):1596–1613
Segurado J, Llorca J (2002) A numerical approximation to the elastic properties of sphere-reinforced composites. J Mech Phys Solids 50(10):2107–2121
Simo JC, Taylor RL, Pister KS (1985) Variational and projection methods for the volume constraint in finite deformation elasto-plasticity. Comput Methods Appl Mech Eng 51(1):177–208
Sukumar N, Tabarraei A (2004) Conforming polygonal finite elements. Int J Numer Methods Eng 61(12):2045–2066
Sussman T, Bathe KJ (1987) A finite element formulation for nonlinear incompressible elastic and inelastic analysis. Comput Struct 26(1):357–409
Webb J (1990) Imposing linear constraints in finite-element analysis. Commun Appl Numer Methods 6(6):471–475
Wriggers P (2008) Nonlinear finite element methods, vol 4. Springer, Berlin
Zienkiewicz OC, Taylor RL (2005) The finite element method for solid and structural mechanics. Butterworth-Heinemann, Oxford
Acknowledgments
We acknowledge the support from the US National Science Foundation (NSF) through Grant CMMI #1559595 (formerly #1437535). The information presented in this paper is the sole opinion of the authors and does not necessarily reflect the views of the sponsoring agency.
Author information
Authors and Affiliations
Corresponding author
Appendix: On the FE implementation in 3D
Appendix: On the FE implementation in 3D
This appendix briefly describes the generalization of the FE implementation of the proposed rigid-body-constraint formulation to 3D. In this case, a set of four non-coplanar “reference” nodes is needed for each interface \(\Gamma ^i_h\) (in 3D, \(\Gamma ^i_h\) is the boundary of a polyhedral \(\Omega _{i h}^{(2)}\)). Assuming that we have four non-coplanar “reference” nodes for the interface \(\Gamma ^i_h\), denoted as \(\widetilde{\mathbf{X }}^i_r=\left\{ \tilde{x}^i_r,\tilde{y}^i_r,\tilde{z}^i_r\right\} ^T, r=1,2,3,4\), any linear field \(g\left( \mathbf X \right) \) can be interpolated exactly via
where the interpolation functions are of the form
with
and \(\mathbf X =\left\{ x,y,z\right\} ^T\). With help of (81), the unknown fields \(\mathbf u ^i_0\) and \(\mathbf H ^i\) can be written as
with \(\widetilde{\mathbf{u }}^i_{,r}=\left\{ \widetilde{u}^i_{x,r},\widetilde{u}^i_{y,r},\widetilde{u}^i_{z,r}\right\} ^T\). The remainder of the generalizations for both displacement-based and mixed approximations can be obtained by simply expanding the dimensions of nodal variables (and consequently, the corresponding arrays and matrices), and following the same procedure described for the 2D case. For conciseness, they are not presented here. As a final remark, we note that there is a total of \(3n-6\) constraining equations for a given interface \(\Gamma ^i_h\) with n boundary nodes in 3D. Moreover, \(3n-12\) of the constraining equations are linear on the displacement DOFs (corresponding to Eqs. (71), (75) in 2D), and the remaining 6 are quadratic on the displacement DOFs of the “reference” nodes (corresponding to Eqs. (70), (74) in 2D).
Rights and permissions
About this article

Cite this article
Chi, H., Lopez-Pamies, O. & Paulino, G.H. A variational formulation with rigid-body constraints for finite elasticity: theory, finite element implementation, and applications. Comput Mech 57, 325–338 (2016). https://doi.org/10.1007/s00466-015-1234-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-015-1234-2