
Abstract
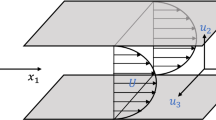
The reconstruction of the flow behind a backward-facing step at a Reynolds number of 60,000 using linear stochastic estimation (LSE) and modified LSE (with or without multi-time-delay) is investigated. In particular, the turbulent spatial integral length scales estimated for several sensor configurations are studied. The estimation of the proper orthogonal decomposition (POD) modes is also performed in order to show the limitations of the SE for complex flows, for which taking into account only a few POD modes may not be enough to represent the flow dynamics. The importance of the sensor locations on the estimation is also emphasized, and the opportunity to use a sensor location optimization algorithm is investigated.




































Similar content being viewed by others

Abbreviations
- h :
-
Step height
- d x :
-
Sensors grid spacing in the streamwise direction
- d y :
-
Sensors grid spacing in the vertical direction
- \(\varLambda\) :
-
Turbulent spatial integral length scale
- λ:
-
POD mode characteristic length
- R 2 :
-
Determination coefficient
- u :
-
Velocity vector
- u :
-
Streamwise velocity component
- v :
-
Vertical velocity component
- Ω:
-
Spatial domain
- Φ :
-
POD mode
- a :
-
POD coefficient
- E :
-
Conditional event
- A, B :
-
SE coefficients
- τ :
-
Time delay
- e :
-
exp(1)
- LSE:
-
Linear stochastic estimation
- QSE:
-
Quadratic stochastic estimation
- MTD-SE:
-
Multi-time-delay stochastic estimation
- POD:
-
Proper orthogonal decomposition
- TKE:
-
Turbulent kinetic energy
References
Abu-Mostafa YS, Magdon-Ismail M, Lin H-T (2012) Learning from data. AMLBook
Adams EW, Johnston JP (1988) Effects of the separating shear layer on the reattachment flow structure part 2: reattachment length and wall shear stress. Exp Fluids 6(7):493–499
Adrian RJ (1977) On the role of conditional averages in turbulence theory. In: Tirbulence in liquids. Proceedings of the fourth biennial symposium, Rolla, MO, 22–24 Sept 1975. Science Press, Princeton, NJ, pp 323–332
Arnault A, Dandois J, Delva J, Monnier J-C, Foucaut J-M (2015) Assessment of stochastic estimation ability to reconstruct velocity fields. In: 50th 3AF international conference on applied aerodynamics, Toulouse, France
Arnault A, Dandois J, Foucaut J-M (2016) Comparison of stochastic estimation methods with conditional events optimization for the reconstruction of the flow around a supercritical airfoil in transonic conditions. Comput Fluids 136:436–455
Bretthauer B, Kompenhans J (1998) DLR comparison of the evaluations of image 03 and image 04 from T1.2 database. EUROPIV, Lille
Clark H, Naghib A, Lavoie P (2014) General perspectives on model construction and evaluation for stochastic estimation, with application to a blunt trailing edge wake. Exp Fluids 55(7)
Cohen K, Siegel S, Luchtenburg M, McLaughlin T, Seifert A (2004) Sensor placement for closed-loop flow control of a “D” shaped cylinder wake. In: 2nd AIAA flow control conference, Portland, Oregon
Cohen K, Siegel S, McLaughlin T (2006) A heuristic approach to effective sensor placement for modeling of a cylinder wake. Comput Fluids 35(1):103–120
Driver D, Seegmiller HL, Marvin J (1987) Time-dependent behavior of a reattaching shear layer. AIAA J 25(7):914–919
Druault P, Yu M, Sagaut P (2010) Quadratic stochastic estimation of far-field acoustic pressure with coherent structure events in a 2D compressible plane mixing layer. Int J Numer Methods Fluids 62:906–926
Durgesh V, Naughton JW (2010a) Multi-time-delay LSE-POD complementary approach applied to unsteady high-Reynolds-number near wake flow. Exp Fluids 49:571–583
Durgesh V, Naughton JW (2010b) Multi-time-delay LSE-POD complementary approach applied to unsteady high-Reynolds-number near wake flow. Exp Fluids 49:571–583
Hall JW, Ewing D (2010) Spectral linear stochastic estimation of the turbulent velocity in a square three-dimensional wall jet. J Fluids Eng 132(5)
Hekmati A, Ricot D, Druault P (2011) About the convergence of POD and EPOD modes computed from CFD simulation. Comput Fluids 50:60–71
Hosseini Z, Martinuzzi RJ, Noack BR (2015) Sensor-based estimation of the velocity in the wake of a low-aspect-ratio pyramid. Exp Fluids 56(1)
Hudy LM, Naguib A, Humphreys WM (2007) Stochastic estimation of a separated-flow field using wall-pressure-array measurements. Phys Fluids 19
Lasagna D, Orazi M, Iuso G (2013) Multi-time delay, multi-point linear stochastic estimation of a cavity shear layer velocity from wall-pressure measurements. Phys Fluids 25
Lasagna D, Fronges L, Orazi M, Iuso G (2015) Nonlinear multi-time-delay stochastic estimation: application to cavity flow and turbulent channel flow. AIAA J 53(10):2920–2935
Lumley JL (1967) The structure of inhomogeneous turbulent flows. In: Yaglom AM, Tatarski VI (eds) Atmospheric turbulence and radio wave propagation. Nauka, Moscow, pp 166–178
Monnier JC, Croisier G (1998) Contribution to the EUROPIV database. ONERA, Meudon
Muradore R, Bezzo F, Barolo M (2005) Optimal sensor location for distributed-sensor systems using multivariate regression. Comput Chem Eng 30:521–534
Murray NE, Ukeiley LS (2002) Estimating the shear layer velocity field above an open cavity from surface pressure measurements. In: AIAA Paper 2002–2866, Saint Louis
Murray N, Ukeiley L (2007) Modified quadratic stochastic estimation of resonating subsonic cavity flow. J Turbul 8(53):1–23
Naguib A, Warck CE, Juckenhofel O (2001) Stochastic estimation and flow sources associated with surface pressure events in a turbulent boundary layer. Phys Fluids 13(9):2611–2626
Nguyen TD, Wells JC, Mokhasi P, Rempfer D (2010) Proper orthogonal decomposition-based estimations of the flow field from particle image velocimetry wall-gradient measurements in the backward-facing step flow. Measur Sci Technol 21(11)
O’Neill PL, Nicolaides D, Soria J (2004) Autocorrelation functions and the determination of integral length with reference to experimental and numerical data. In: 15th Australasian fluid mechanics conference. The University of Sydney, Sydney, Australia
Pope S (2000) Turbulent flows. Cambridge University Press, Cambridge
Raffel M, Willert C, Werely S, Kompenhans J (2007) Particle image velocimetry: a pratical guide. Springer, Berlin
Ruiz T, Sicot C, Brizzi LE, Borée J, Gervais Y (2010) Pressure/velocity coupling induced by a near wall wake. Exp Fluids 49(1):147–165
Sirovich L (1987) Turbulence and the dynamics of coherent structures, part 1: coherent structures. Q Appl Math 45(3):567–571
Taylor JA, Glauser MN (2004) Towards practical flow sensing and control via POD and LSE based low-dimensional tools. J Fluids Eng 126(3):337–345
Tinney CE, Ukeiley LS, Glauser MN (2008) Low-dimensional characteristics of a transonic jet. Part 2. Estimate and far-field prediction. J Fluid Mech 615:53–92
Tu JH, Griffin J, Hart A, Rowley CW, Cattafesta LN, Ukeiley LS (2013) Integration of non-time-resolved PIV and time-resolved velocity point sensors for dynamic estimation of velocity fields. Exp Fluids 54:1429–1449
Author information
Authors and Affiliations
Corresponding author
Appendix: Tikhonov regularization
Appendix: Tikhonov regularization
Let us denote N s the number of time samples used to train the MTD-LSE. The problem of finding the MTD-LSE coefficients A x coefficients can therefore be arranged in the following matrix system:
with:
In classical LSE, the system (19) is solved using the ordinary least square (OLS) method. In the OLS, one looks to minimize the loss function defined by the L 2-norm of the residual \({\text{MA}}\left( \varvec{x} \right) - {\text{U}}\left( \varvec{x} \right)\):
However, this system is ill-posed and the matrix M can be very ill-conditioned. In such conditions, the resulting model can be overfitted. The error obtained on the training data set is much lower than the error obtained on data outside the training data set. Thus, it may become better to compute an approximate solution using a nearby system that is less sensitive to perturbations that the initial one. To do so, the loss function is penalized. Using the Tikhonov regularization, the loss function is penalized using the L 2-norm and becomes:
Then, the coefficients A(x) are solution of the following regularized system:
where L is called the Tikhonov matrix. Most often, L is taken such as being proportional to the identity matrix: L = αI. Such matrix is used in this work. And the regularization parameter α is determined by cross-validation (more details can be found in Abu-Mostafa et al. 2012).
In comparison with the OLS where A(x) satisfies the minimization problem \(\min_{{A\left( \varvec{x} \right) \in R^{{N.N_{d} }} }} \left( ||{MA\left( \varvec{x} \right) - U\left( \varvec{x} \right)^{2} } \right)\), using the Tikhonov regularization A(x) satisfies the minimization problem:
In our case, only one regularization parameter is used for the complete system formed with A the matrix containing all the columns A(x) for all x of the field to estimate and U all the columns U(x).
Rights and permissions
About this article

Cite this article
Arnault, A., Dandois, J., Monnier, JC. et al. Analysis of the filtering effect of the stochastic estimation and accuracy improvement by sensor location optimization. Exp Fluids 57, 185 (2016). https://doi.org/10.1007/s00348-016-2276-8
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-016-2276-8