
Abstract
The use of high-resolution aerial imagery for assessing actual crop evapotranspiration \( \left({ET}_{a}\right)\) holds the potential to optimize the use of limited water resources in agriculture. Despite this potential, there is a shortage of information regarding the effectiveness of energy balance algorithms, initially designed for satellite remote sensing in estimating \( {ET}_{a}\) using aerial imagery. This study addresses this gap by employing the remote sensing model pySEBAL (Surface Energy Balance Algorithm for Land) in conjunction with high-resolution aerial imagery to estimate \( {ET}_{a}\) for processing tomatoes. Throughout the 2021 growing season, an aircraft captured multispectral and thermal imagery over a processing tomato field near Esparto, California, USA. Simultaneously, an eddy covariance flux tower within the field measured high-frequency turbulent fluxes and low-frequency biometeorology variables essential for evaluating the energy balance. The comprehensive assessment of energy balance components, including \( {ET}_{a}\), yielded compelling evidence that pySEBAL accurately estimated \( {ET}_{a}\) at high spatial resolution. The root mean square error (RMSE) and normalized RMSE for various energy balance components were as follows: 33 W m− 2 (12%) for latent heat flux, 29 W m− 2 (35%) for sensible heat flux, 24 W m− 2 (4%) for net radiation, and 10 W m− 2 (15%) for soil heat flux. Additionally, \( {ET}_{a}\) exhibited an RMSE and NRMSE of 0.26 mm d− 1 (6%). Moreover, the spatial mapping of \( {ET}_{a}\) across the processing tomato field visually depicted the spatial variability associated with irrigation scheduling, crop development, areas affected by disease, and soil heterogeneity. This research underscores the value of high resolution spatial aerial imagery and pySEBAL algorithm for estimating \( {ET}_{a}\) variability in the field, a crucial aspect for guiding precision irrigation management and ensuring the optimal use of limited water resources in agriculture.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Evapotranspiration (\( {ET}_{a})\), a key process in the hydrological cycle, significantly influences water resource management and agricultural productivity (Raza et al. 2023). In regulating irrigation schedules for water-demanding crops specifically, the importance of \( {ET}_{a}\) is notably extensive. By optimizing irrigation based on precise \( {ET}_{a}\) estimations, a careful balance can be achieved between providing adequate water for crops and maintaining rigorous water conservation standards. This optimization is particularly evident in leading countries in the global processing tomato industry such as China, Italy, the United States (US), and Spain, where advanced water management strategies are employed to maximize crop yields (Cammarano et al. 2022). The agricultural sector in the US represents a major user of both groundwater and surface water for irrigation. This usage accounts for an estimated 42% of the total freshwater withdrawals in croplands (Warziniack et al. 2022). Current projections suggest a vast expanse of approximately 23.5 Mha (million hectares) is devoted to irrigated agriculture in the US (Kenny et al. 2009). Noteworthy is the prevalence of irrigated cropland in Nebraska (14.8%) and California (13.5%) (USDA 2022). The water usage in this sector is immense, with an annual consumption of roughly 162 bcm (billion cubic meters). From this volume, about 70% is lost through \( {ET}_{a}\), while the remainder either infiltrates to recharge groundwater aquifers or is lost as surface runoff (Ebert et al. 2022).
Processing tomatoes are among the top 10 irrigated crops in California, an important cash crop for many growers. In California processing tomatoes are predominately grown in the San Joaquin and Sacramento Valley constituting over 90% of US production and a considerable portion of global output, estimated at around 35% (Hartz and Bottoms 2009; Pathak and Stoddard 2018). The availability of water for irrigation threatens the long-term sustainability. During droughts, which were intensified by climate change, processing tomato growers and other farmers in California resorted to groundwater pumping for irrigation. This led to several negative impacts, including land subsidence, the drying out of drinking water wells, and deterioration in water quality (Peddinti and Kisekka 2022). To address these challenges, California enacted the Sustainable Groundwater Management Act (SGMA) which requires groundwater basins to reach sustainability by 2040. To cope with the changing climate and increased regulation of water supplies for irrigation, there is an urgent need to develop precision water management for processing tomato growers that optimize the use of limited water.
Water, heat, and momentum exchanges at the interface of the land and atmosphere are intricately influenced by the process of combined transpiration and evaporation, collectively known as \( {ET}_{a}\) (Wang et al., 2016a; Wei et al. 2013). The estimation of \( {ET}_{a}\) encompasses diverse methodologies, including conventional or direct approaches, hydrological modeling (Zhao et al. 2013), and remote sensing techniques (Kustas and Norman 1996; Bastiaanssen 2000b; Jaafar and Ahmad 2020; Peddinti and Kisekka 2022). Ground-based retrieval methods such as eddy covariance (EC) (Nicolini et al. 2017; Peddinti et al. 2020), Bowen ratio energy balance (Prueger et al. 1997), lysimeters (Chávez et al. 2009; Hirschi et al. 2017), and analogous techniques (Subedi and Chávez 2015; Singh Rawat et al. 2019), directly quantify \( {ET}_{a}\) at specific monitoring sites, allowing for evaluation of its temporal variations within the environment. The widely employed lysimeter method serves as a valuable tool for estimating \( {ET}_{a}\) through dynamic soil water balance evaluation (Liu et al. 2002), while EC methods have gained increasing popularity in recent years as direct methods of \( {ET}_{a}\) measurement. The precision of EC instruments significantly influences all measured fluxes (Williams et al. 2004; Wagle et al. 2017). An essential consideration for EC methods involves the requirement of a uniform terrain and homogeneous vegetation cover upwind from the observation point (referred to as the fetch) (Sogachev et al. 2005; Vesala et al. 2008). Conversely, these methodologies entail higher operational costs, and necessitate more frequent maintenance (Heidbach et al. 2017).
The remote sensing approach has been demonstrated to be a feasible method for computing \( {ET}_{a}\) across regional and field scales on Earth’s surface by directly correlating surface radiances with components of the surface energy balance (Acharya et al. 2021). Notably, current remote sensing systems leveraging microwave data offer a significant advantage in retrieving regionally distributed estimations of \( {ET}_{a}\) (Anderson et al. 2018; Peddinti et al. 2020; Beeri et al., 2023). The abundance of imagery from satellites, airplanes, and UAVs/drones presents opportunities to estimate water needs for individual crops, small irrigation zones, and at larger scales (Tasumi 2005; Miralles et al. 2011; Li et al. 2013; Cancela et al. 2019; Park et al. 2021; Sozzi et al. 2021). The growing demand for precise and up-to-date information on the water requirements of crops, especially in response to evolving weather patterns and increased regulation of agricultural water is evident. Over recent decades, satellite and aircraft-mounted cameras have dominated agricultural monitoring (Cancela et al. 2019). However, despite their prevalence, these platforms face drawbacks such as high costs, technical expertise requirements, scheduling challenges, susceptibility to cloud interference, and limited resolution for smaller fields (Li et al. 2009; Zhao et al. 2019).
The integration of drone technology in agriculture is experiencing an upward trajectory, particularly in the generation of \( {ET}_{a}\) maps which are vital for efficient water resource management. Drones, by virtue of their capability to fly at relatively low altitudes compared to satellites and airplanes, provide an unparalleled advantage by offering high-resolution imagery. This is critical for precision agriculture where detailed information on crop health and water requirements is essential. The attributes that set drone technology apart include rapid data acquisition, exceptional image quality, and the ability to cover a range of spectral bands. Furthermore, drones are capable of capturing multi-angular data, enhancing the analytical perspective, and can accommodate multiple sensors simultaneously, thus gathering a comprehensive array of data points (Delavarpour et al. 2021). Nevertheless, the application of drones over expansive agricultural areas does present challenges. The necessity for low-altitude flight to obtain high-resolution data leads to an increase in flight duration, which in turn, results in higher energy demands and the generation of large datasets that necessitate considerable processing power (Barbedo 2019; Delavarpour et al. 2021). In regions where suitable, such as in California, manned aircraft continue to be a viable option for collecting multispectral and thermal data across extensive farmlands, providing a balance between resolution, coverage, and operational costs.
Despite the increasing availability of high-resolution aerial imagery, there is a growing body of information regarding the effectiveness of energy balance algorithms, for example, SEBAL (Surface Energy Balance Algorithm for Land), SEBS (Surface Energy Balance System), METRIC (Mapping Evapotranspiration at high Resolution with Internalized Calibration), two source energy balance (TSEB), and SSEBop (Simplified Surface Energy Balance Operational), which were initially designed for satellite remote sensing, in estimating \( {ET}_{a}\) (Bastiaanssen 1995; Su 2002; Allen et al. 2007; Senay et al. 2011). For a comprehensive review of energy balance algorithms such as SEBAL, METRIC, and SEBS models for estimating \( {ET}_{a}\) from satellite remote sensing, readers are referred to the works by Xue et al. (2020a, b); and Peddinti and Kisekka (2022). A multitude of research studies have examined the estimation of \( {ET}_{a}\) in different ecosystems through the use of high-resolution drone/aerial imagery. For example, Chandel et al. (2020) employed the METRIC model to study field crops such as spearmint, potato, and alfalfa. Simpson et al. (2022) investigated the tree-grass ecosystem using the TSEB model, while Xia et al. (2016) used the TSEB modeling systems in their study of vineyards. Peddinti and Kisekka (2022) conducted a comparative analysis of SEBAL, METRIC, and TSEB models within almond orchards, and Hoffmann et al. (2016) applied the TSEB model in their research on barley fields. In addition to these studies, in recent Tunca (2023) evaluated the performance of the TSEB model for sorghum and Meza et al. (2023) used the TSEB model to study irrigated turfgrass.
The SEBAL algorithm has demonstrated its effectiveness in estimating evapotranspiration, yet its testing has not been comprehensive across diverse ecosystems. Particularly, its effectiveness remains unverified when applied to high-resolution aerial or drone imagery within crops, such as processing tomatoes, for the purpose of estimating \( {ET}_{a}\). The specified objectives of the study included:
(1) Estimate high-resolution \( {ET}_{a}\) for processing tomatoes utilizing the pySEBAL model at 1 m resolution.
(2) Evaluate the pySEBAL model’s performance by comparing its energy balance components estimates with those measured using an eddy covariance flux tower.
(3) Assess the uncertainty levels associated with spatial land surface temperatures, normalized difference vegetation index, and \( {ET}_{a}\) estimates and compare these uncertainties with those related to irrigation management strategies.
Materials and methods
Study site description
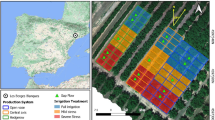
Field experiments were conducted on a 34-ha commercial processing tomato farm located near Esparto, California, USA (Fig. 1) from April to August 2021. In April 2021, the field was planted with processing tomatoes (Lycopersicon esculentum Mill), spaced 0.45 m apart between rows and 0.30 m apart along the rows. The climate of the study site falls under Koppen’s classification of a warm Mediterranean climate, characterized by high summer temperatures and ample sunshine during the summer months. The soil predominantly consists of two distinct soil types: silty clay in the northwest portion and silty clay loam in the remaining area of the farm (Fig. 1). Subsurface drip irrigation (SDI) was used with the drip line buried in the middle of the growing bed at 20 cm depth, dripper spacing of 30 cm and a dripper discharge rate of 0.6 l h− 1. The study region typically receives most of the precipitation in the winter months, no rainfall occurred during the experimental period.

The location of the research site near Esparto California. The study region illustrates the two different types of soil (on the left) and the footprint area (on the right) for the eddy covariance flux tower that is installed within the study region
Eddy covariance and meteorological data
An eddy covariance (EC) flux tower was installed 2.5 m above ground level within the field (Fig. 1). This EC system comprised a 3D sonic anemometer (Gill R3-50, Li-Cor Inc., NE, USA) for measuring orthogonal wind velocity components and an open path gas analyzer (LI-7500, Li-Cor Inc., NE, USA) for measuring CO2 and H2O fluxes. Measurements were captured at a frequency of 10 Hz for the three-dimensional wind components, CO2, and H2O concentrations. In addition, three soil heat flux plates (HFT-3, Radiation Energy Balance Systems, WA, USA) were buried at 8 cm depth, coupled with soil thermocouples (TCAV-L, Campbell Scientific Inc., UT, USA), and soil moisture probes (GS-1, METER Group Inc., WA, USA) at 5 cm depth to measure heat storage above the plates. The flux data was processing by applying standard corrections using EddyPro software (Version: 7.0.9, Li-Cor Inc., NE, USA), including two-dimensional rotation, spectral corrections (Moncrieff et al. 1997), and adjustments for heat and water vapor density fluctuations (Webb et al. 1980). Net radiation measurements including short and long wave incoming and outgoing radiation were measured using a four-component net radiometer (SN-500-SS, Apogee Instruments Inc., UT, USA). The TOVI software (Li-Cor Inc., NE, USA) was employed for data quality and footprint analysis. Given the location of the flux tower within the large processing tomato field, the majority of the footprint area was encompassed within the study region (Fig. 1). For the specified timeframe, the energy balance ratio (EBR) defined as the annual ratio of total required energy to total available energy was calculated to be 1.12, with a coefficient of determination (R²) of 0.93. This demonstrates a strong agreement between the required and available energy fields, as illustrated in Fig. 2. This EBR value aligned with energy balance regression values reported by Wilson et al. (2002) for various FLUXNET sites. In addition, biometeorological parameters such as air temperature (°C) and relative humidity (%) were essential for the energy balance modeling. Since our setup lacked the specific sensors to measure these parameters directly at the study site, we obtained the necessary data from the closest California Irrigation Management Information System (CIMIS) station, number 226. This station is situated approximately 10 km from the study site, and we ensured that its data was appropriately representative of the conditions at our location.

The energy closure analysis was conducted using data from April to August 2021. The x-axis represents available energy (Rn-G), while the y-axis illustrates the correlation with the required energy (LE + H). Here, ‘LE’ represents the latent heat flux (W m− 2), ‘H’ represents the sensible heat flux (W m− 2), ‘G’ stands for the soil heat flux (W m− 2), and ‘Rn’ denotes the net radiation (W m− 2)
High resolution aerial imagery data collection and processing
Ceres Imaging Inc. (https://www.ceresimaging.net/) was used to acquire and preprocess aerial imagery, comprising both thermal and multispectral images across various dates. In Table 1, details regarding flight dates, times, altitude, air temperatures, and average leaf area index measured at multiple locations on the same day are presented. The images were acquired using a 13 mm lens with a field of view (FOV) spanning 45° x 37°. The imaging setup included a FLIR A65 thermal sensor (FLIR Systems, Wilsonville, OR, USA) and a customized constellation of VNIR IDS camera systems. All acquisitions took place between 11:30 and 15:30 (PST), with multispectral images possessing a resolution of 3261 by 4030 pixels and thermal images at 2623 by 3254 pixels. The spectral response ranged from 7.5 to 13 μm (Bellvert et al. 2021; Peddinti and Kisekka 2022). Both thermal and multispectral bands exhibited a spatial resolution within the range of 0.2 to 0.4 m. However, to ensure uniformity, final mosaics were resampled to a consistent 1 m resolution. This resampling maintained a consistent spatial resolution across all collected images.
The FLIR A65 camera system used an uncooled microbolometer and underwent temperature calibration in the 15–50 °C range at the Ceres Imaging lab, employing a calibrated black body heat source. Transforming sensor temperature readings into surface temperatures involved considering a vegetation emissivity factor of 0.98 and adjusting for transmission over the surrounding environment. To accommodate weather influences, CO2 and water vapor concentrations during flight time were sourced from Dark Sky and fed into the Simple Model of the Atmospheric Radiative Transfer of Sunshine. Upon capture, thermal image data were recorded in FLIR’s proprietary raw radiometric format. These images were continuously streamed radiation. Subsequently, a conversion process adjusted the recorded data into apparent temperatures. This adjustment involved factoring in external temperature, considering the combined effects of wind velocity, air temperature, and relative humidity.
Estimation of evapotranspiration using pySEBAL algorithm
This study employed a modified version of the pySEBAL model (https://github.com/wateraccounting/PySEBAL_dev) to delineate the spatial time-series estimation of field-scale high-resolution crop evapotranspiration (\( {ET}_{a}\)) at 1 m resolution specifically for processing tomatoes. The pySEBAL model offers the versatility to estimate \( {ET}_{a}\) across varying resolutions, leveraging user-provided inputs such as Landsat, VIIRS, MODIS, and drone or aerial imagery data. Developed as an open-source tool, the pySEBAL model was scripted within a Python environment (Hessels et al. 2017). Elucidated algorithmic details for the SEBAL model are extensively outlined in works by Bastiaanssen (1995), Hessels et al. (2017), and Bastiaanssen (2005). Based on the principles of the surface energy balance, the pySEBAL model integrates critical spatial inputs, including land surface temperature (Ts), Normalized Difference Vegetation Index (NDVI), and surface albedo. At the instance of satellite overpass, the model computes the surface energy balance budget, deriving the latent heat flux as the residual term, as specified by Eq. (1). This equation describes the interplay of thermal properties, vegetation indices, and surface reflectance to ascertain the latent heat component.
where \( \lambda E\) is the instantaneous latent heat flux in the atmospheric boundary layer (W m− 2), Rn is the instantaneous net radiation flux (W m− 2), H is the instantaneous sensible heat flux (W m− 2) and G is the instantaneous soil heat flux (W m− 2).
The net radiation is an expression of the available radiation at the surface, and it can be computed by using Eq. (2)
where \( {\upalpha }\) is surface albedo, \( {R}_{s\downarrow }\) is incoming shortwave radiation (W m− 2), \( {R}_{L\downarrow }\) is the incoming longwave radiation (W m− 2), \( {R}_{L\uparrow }\) is the outgoing longwave radiation (W m− 2), and \( {\epsilon }_{0}\) is the broadband surface emissivity estimated by a semi-empirical relationship between NDVI and leaf area index utilizing the red and NIR bands.
Using NIR, red, and green bands from aerial imagery, the surface albedo at each pixel was determined using the Landsat 8 snow-free visible and shortwave band albedo coefficients (Wang et al. 2016b; Cao et al. 2018) as shown in the following Eq. (3)
where \( {b}_{1}\) represents the NIR band, \( {b}_{2}\) represents the red band, and \( {b}_{3}\) represents the green bands collected from the aerial imagery on each flight date.
Even though remote sensing techniques do not make it possible to directly measure G, this parameter can be approximated as a fraction of Rn by applying an empirical equation (Eq. 4) that was developed by (Bastiaanssen 1995)
where \( {T}_{s}\) is the surface temperature (K), \( \alpha \) is the surface albedo, and NDVI is the normalized difference vegetation index.
Because of the correlation between the aerodynamic resistance and the sensible heat flux, H is estimated through iterative calculation (Bastiaanssen 1995). During the initial phase of the process, it is presumed that the air condition is one of equilibrium, with no convection present. Because of the sensible heat flux that will be produced by this first iteration, the air will become unstable, which will result in a different level of aerodynamic resistance. The output of this step is fed into the next iteration (Bastiaanssen 1995, 2000a; Bastiaanssen et al. 1998). This iteration is repeated multiple times to calculate the final sensible heat flux by following Eq. (5).
where \( {\rho }_{a}\) is atmospheric air density (kg m− 3), \( {C}_{p}\) is the specific heat of air at constant temperature (∼ 1004 J kg− 1 K− 1), \( {r}_{ah}\) is aerodynamic resistance to heat transfer (s m− 1) calculated using Eq. (6)
where K is the Von Karman’s constant (0.41), \( {u}^{*}\) is the friction velocity (ms− 1), z is the reference height (m), \( {z}_{oh}\) and \( {d}_{0}\) are roughness length for heat transfer and zero-displacement height (m), and \( {\psi }_{h}\) is the atmospheric stability correction factor for heat transport.
Additionally, the friction velocity, denoted by u*, can be approximated by using Eq. (7)
where \( {u}_{b}\) represents wind speed (ms− 1) at mixing height (\( {z}_{b}\)=200 m), \({Z_{0m}}\) represents the roughness height for momentum transfer, and \( {\psi }_{m}\) represents stability corrections for momentum.
The difference in temperature near the surface, denoted by dT, is calculated using the radiometric surface temperature, Ts, and a straightforward linear relationship derived from two anchor pixels in the aerial image, denoted respectively as hot and cold.
where \( a\) and \( b\) are referred to as the regression coefficients.
The process of selecting anchor pixels, also known as cold and hot pixels, is the most essential stage in the pySEBAL model. The pySEBAL model includes an automatic search algorithm that decides which pixels are cold and which are hot based on the following criteria (Xue et al. 2020b; Jaafar and Ahmad 2020; Peddinti and Kisekka 2022). The highest NDVI values in the scene were used to automatically identify the cold pixels, and the model assumes that the level of available energy at the cold pixel is equivalent to the amount of required energy in the image. The NDVI value range of 0.03 to 0.2, a high LST, and an \( {ET}_{a}\) rate of zero were the criteria that were used to identify the hot pixels (Xue et al., 2020).
An advection factor is used to convert the instantaneous evaporative fraction (\( {EF}_{inst})\) calculated from the instantaneous Rn, H, and G at the time-of-flight overpass into the daily evapotranspiration (ET24), thus mitigating errors caused by the \( {ET}_{a}\) increase in the afternoon.
where \( {ET}_{24}\) represents the daily \( {ET}_{a}\) rate of the aerial imagery overpass date (mmd− 1), \( \lambda \) is the latent heat of vaporization (Jkg− 1), \( {\rho }_{w}\) represents the density of water (Kgm− 3) and \( {G}_{24}\) is the daily average soil heat flux (W m− 2). \( AF\) is the advection factor, \( {R}_{n24}\) is the average daily net radiation (W m− 2), and both terms are calculated by applying Eq. (11) and Eq. (12), respectively.
where \( {e}_{s}\) represents the saturated vapor pressure (Pa), \( {e}_{a}\) represents the actual vapor pressure (Pa), \( {R}_{a}\) is the daily extraterrestrial solar radiation (W m− 2), and \( {T}_{sw}\) is the daily atmospheric transmissivity that considers the effects of humidity, dust, and other air pollutants.
Statistical validation
To assess the accuracy between modeled and observed energy balance fluxes, several statistical measures of goodness-of-fit were employed. The agreement between observed and modeled turbulent fluxes (LE and H), net radiation (Rn), soil heat flux (G), and evapotranspiration (\( {ET}_{a}\)) were evaluated using root mean square error (RMSE), normalized RMSE (NRMSE), index of agreement (d), mean bias error, and normalized bias (Nbias) as per equations (13) to (17).
Where \( {P}_{i}\) represents the modeled value, \( {O}_{i}\) represents the observed value, \( \stackrel{-}{O}\) represents the average of the observed values, and \( n\) denotes the total number of observations.
Results and discussions
Land surface temperature spatial variability
The development, yield, and crop quality are intricately linked to Land Surface Temperature (LST) due to its influence on various plant physiological processes like photosynthesis, respiration, and transpiration. Figure 3 shows spatial variability in land surface temperature obtained from airborne flights over the processing tomato field on different dates between May and August 2021. Corresponding flight times, altitudes, air temperatures, and average Leaf Area Index (LAI) recorded at various field locations are detailed in Table 1. Throughout the growing season, LST in the field ranged between 30 and 62 °C. High-resolution LST imagery clearly showed field-scale heterogeneity, reflecting differences in crop establishment, growth of the crop, irrigation scheduling, soil heterogeneity, disease, or pest infestations. For instance, on May 27, 2021, as the flowering stage initiated, LST values were notably high, varying between 38 and 60 °C. This increase was attributed to greater visibility of soil pixels within rows, exhibiting higher temperatures compared to the canopy. Concurrently, the average LAI measured within the field was 0.64, and air temperature was 27.5 °C.

The land surface temperature (LST) spatial distributions over the processing tomato field during different days from May to August 2021 were taken by aerial flight near Esparto California, USA
On June 8, 2021, as the tomato plants fully bloomed and expanded their canopy, a considerable portion of soil pixels became covered, resulting in relatively lower LST values ranging from 30 to 51 °C. This decline corresponded with a lower air temperature recorded at 21.3 °C during the flight. Subsequent dates, such as June 22 and July 6, 2021, displayed LST values spanning 33 to 62 °C. Areas with lower plant density due to poor plant establishment exhibited higher LST values, indicating a larger contribution of heated soil pixels. Towards mid-season the LAI increased ranging from 3.9 to 4.4. Observations on July 20, 2021, revealed declining LST trends across most rows in the processing tomato field, with the exception of a few patches exhibiting higher LST values (34 to 61 °C). Differences in LST across the study area have revealed variations in plant growth. These variations suggest that the water usage by crops is not uniform, but instead, it varies across the landscape (Sepulcre-Canto et al. 2007; Madakarah et al. 2019; Ghafarian et al. 2022). By August 3, 2021, LST values continued to decline across the field, except for patches displaying elevated temperatures, potentially due to the absence of plants in those areas.
Normalized difference vegetation index spatial variability
The high-resolution spatial analysis of the NDVI within the processing tomato crop presents a valuable framework for assessing plant health and production potential. Figure 4 shows the NDVI spatial maps for the processing tomato field across different periods during the 2021 growing season. NDVI values exhibited a consistent trend, notably increasing from May to early August, indicating progressive plant development from initial to mid-season growth. During the flowering growth stage, spanning from May 27 to June 8, low NDVI values were observed across most areas suggesting full canopy cover had not yet been reached. However, as the crop transitioned to fruit set and maturity growth stages on June 22, July 6, and July 20, the images consistently showed high NDVI values throughout the field, peaking at 0.90. An interesting observation was made on August 3rd when the fruit entered its ripening stage, which was indicated by a decrease in NDVI readings in certain regions. This decline indicates crop stress possibly induced by managed deficit irrigation triggered by the grower to increase fruit sugar levels. Notably, visual inspection showed locations on the southwest side of the field with extremely low or close-to-zero NDVI values, attributed to crop dieback (manually observed in the locations) due to disease and pest infestation. The comprehensive analysis of NDVI values offered crucial insights into spatial variability in stress levels and disease management across the field, aligning with prior studies by Benedetti and Rossini (1993) and Thapa et al. (2019). Furthermore, the significance of NDVI in the pySEBAL model, particularly in delineating cold and hot pixels, has been highlighted by Taheri et al. (2022). This study highlights the usefulness of high-resolution NDVI-based spatial analysis to shed light on the temporal patterns of crop health. It’s a useful approach to facilitate targeted interventions and create management strategies. These strategies optimize processing tomato production and precision water management.

The normalized difference vegetation index (NDVI) spatial distributions over the processing tomato field on various days from May to August 2021 were computed using aerial imagery data near Esparto California, USA
Selection of hot and cold pixels in the pySEBAL
In the context of satellite imagery based remote sensing of \( {ET}_{a}\), the pySEBAL model autonomously identifies hot and cold pixels by evaluating the state of vegetation and land cover. Table 2 outlines the thresholds for extreme temperatures and NDVI utilized by the pySEBAL model to designate hot and cold pixels across the six dates employed in this study to estimate \( {ET}_{a}\). Across the six images, the hot pixels exhibited extreme temperatures ranging from 49.8 to 57.1 °C, while the cold pixels ranged from 35.4 to 50.2 °C. The NDVI values for hot pixels ranged between 0.16 and 0.17, contrasting with cold pixel values ranging from 0.80 to 0.87 across the same set of images. Furthermore, the application of irrigation via subsurface drip systems contributed to moderating temperatures beneath the canopy, potentially favoring the identification and selection of cold pixels (Saboori et al. 2021).
Comparison of pySEBAL and eddy covariance energy balance components
The study utilized EC flux tower measurements within the footprint area (Fig. 1) to assess the performance of the pySEBAL model in estimating spatially distributed fluxes and \( {ET}_{a}\) at the field level. The investigation involved a rigorous comparison between EC-measured turbulent fluxes (sensible heat flux and latent heat flux), net radiation, and soil heat flux against the corresponding values derived from the pySEBAL algorithm. The relationships between measured and modeled variables, as illustrated in Fig. 5, are shown with 1:1 line for reference. Similarly, Fig. 6 displays comparisons between modeled and measured \( {ET}_{a}\) for all six dates, with the 1:1 line included for visual reference. Detailed statistical analyses of these relationships are presented in Table 3. The outcomes revealed a notable agreement between the instantaneous fluxes measured and those modeled using pySEBAL. The model accurately reproduced the measured latent heat (LE) flux with an RMSE (NRMSE) of 33 W m-2 (12%), a bias (Nbias) of -22 W m-2 (6%), and an index of agreement (d) value of 0.89. Similarly, the sensible heat (H) flux demonstrated a robust correlation with an RMSE (NRMSE) of 29 W m-2 (35%), a positive bias (Nbias) of 22 W m-2 (24%), and a d value of 0.96. Furthermore, both net radiation (Rn) and soil heat flux (G) exhibited strong agreement with the model, yielding RMSE (NRMSE) and bias (Nbias) values of 24 W m-2 (4%) and − 20 W m-2 (3.5%) for Rn, and 10 W m-2 (15%) and 3 W m-2 (5%) for G, respectively, along with d values of 0.96. The measured \( {ET}_{a}\) values showed a strong correlation with the model, producing low RMSE (NRMSE) of 0.26 mm d-1 (6%), a bias of -0.11 mm d-1 (1.2%), and a d value of 0.97.

Comparison of modeled and measured energy balance components (a) Latent heat flux (LE), (b) Sensible heat flux (H), (c) Soil heat flux (G), and (d) Net radiation (Rn) in a processing tomato field near Esparto California, using the pySEBAL model against eddy covariance (EC) measured fluxes

Comparison of modeled and measured actual evapotranspiration (\( {ET}_{a}\)) in a processing tomato near Esparto California, using the pySEBAL model against the eddy covariance measurements
It’s noteworthy that within the footprint areas of the processing tomato field, all fluxes displayed a strong correlation with lower RMSE values compared to the measured values. This ensures significant confidence in the accuracy of the modeled \( {ET}_{a}\) using high-resolution aerial imagery. Comparative analysis with prior studies revealed differences in model performance. Montibeller (2017) reported RMSE values of 2.67, 8.84, and 6.09 W m− 2 for LE, H, and Rn fluxes in corn and soybean using a modified SEBAL model, demonstrating lower discrepancies than observed in the present study. Peddinti and Kisekka (2022), utilizing aerial imagery and a pySEBAL model over an almond orchard in California, showed RMSE values of 39, 34, and 54 W m− 2 for LE, Rn, and H fluxes, respectively. While the Rn and H fluxes align closely with those in the present study, the observed RMSE for LE was smaller in this study. Furthermore, Peddinti and Kisekka (2022) reported an RMSE of 1.06 mm d− 1 for estimating \( {ET}_{a}\) in almonds, contrasting the 0.26 mm d− 1 observed in this investigation, suggesting potential variations in \( {ET}_{a}\) estimation by pySEBAL as a function of complexity of the crop canopy. Meza et al. (2023) reported RMSE values of 50 W m− 2 for LE and 35 W m− 2 for H, while the RMSE for \( {ET}_{a}\) was below 0.6 mm d− 1 using the TSEB model in irrigated turfgrass. However, these RMSE values are higher compared to our study. Similarly, Tunca (2023) reported RMSE values of 32 to 39 W m− 2 for Rn estimation and 1.06 mm d− 1 for \( {ET}_{a}\) estimation in sorghum using the TSEB model, which are higher than those observed in the current study. These findings provide evidence that surface energy balance models originally developed for satellite-based estimation of \( {ET}_{a}\) can be used with high resolution aerial imagery from airplanes or drones.
Evaluation of the spatial distribution of evapotranspiration
Figure 7 shows high-resolution \( {ET}_{a}\) maps at 1 m spatial resolution computed using the pySEBAL model, covering a single crop season from May to August 2021 for processing tomatoes. These high-resolution images offer insights into the spatial variability in \( {ET}_{a}\) across the field. At various crop stages and in different soil types, consistent observations emerge indicating areas of low \( {ET}_{a}\) predominantly in the eastern part of the field. The high spatial resolution allows to see differences in \( {ET}_{a}\) between crop rows and bare soil between rows. Notably the pixel readings for bare soil were consistently very low i.e., had close zero values for \( {ET}_{a}\) across all images. Which indicates the benefit of SDI in reducing bare soil evaporation. Analyzing the \( {ET}_{a}\) across growth stages a ranged from 0 to 9.5 mm d− 1. On May 27th, 2021, the \( {ET}_{a}\) values were notably low in the northern, central, and eastern parts of the field, corresponding to the crop blossoming growth stage. Conversely, the southwest region of the field exhibited high \( {ET}_{a}\) values, potentially owing to a comparatively higher crop density.

The actual evapotranspiration (\( {ET}_{a}\)) spatial distributions over the processing tomato field on various days from May to August 2021 were computed using the pySEBAL model near Esparto California, USA.
An intriguing pattern emerged from the images until July 6th, showing consistent high \( {ET}_{a}\) trends in the southwest portion of the field. However, subsequent images on July 20 and August 3 showed significantly reduced \( {ET}_{a}\) values in these areas, with patches indicating zero \( {ET}_{a}\) predominantly in the southwest corners. This decline can be attributed to a disease infestation, resulting in plant mortality. The gradual progression of processing tomato growth during June and July, marked by fruit set and maturation, is discernible through higher \( {ET}_{a}\) values across most areas. As the ripening stage approached the end on August 3, a noticeable reduction in \( {ET}_{a}\) values were observed, coinciding with the harvesting on August 24th, 2021. These high-resolution \( {ET}_{a}\) images not only provide detailed spatial insights but also offer a means to track crop development and detect anomalies such as disease-induced mortality, in future irrigation engineers could design variable rate drip irrigation systems that can apply different about of water of the field in order to optimize limited use of water resources in agricultural production.
Summary and conclusions
High-resolution aerial imagery provides the ability to map spatial variability in Land Surface Temperature (LST), Normalized Difference Vegetation Index (NDVI), and albedo. Using high resolution imagery in conjunction with the pySEBAL we were able to accurately produce \( {ET}_{a}\) maps for the processing tomato field. Validation of the \( {ET}_{a}\) values was conducted using eddy covariance measurements, goodness-of-fit provided the evidence affirming that although pySEBAL model was originally developed for satellite remote sensing of \( {ET}_{a}\), it can accurately be used to estimate \( {ET}_{a}\) from high resolution drone or airplane imagery. The root mean square error (RMSE) values for the energy balance components were as follows: 33 W m− 2 for latent heat flux, 29 W m− 2 for sensible heat flux, 24 W m− 2 for net radiation, and 10 W m− 2 for soil heat flux. Additionally, the \( {ET}_{a}\) had an RMSE of 0.26 mm d− 1. In addition, high spatial resolution \( {ET}_{a}\) data can be used by growers to identify areas that need attention or where irrigation could be turned off in case of death of plants due to disease as shown in the current study. Combining the ability to accurately estimate spatially variability in \( {ET}_{a}\) with variable rate irrigation has the potential to optimize water use in agriculture. The framework for high resolution of \( {ET}_{a}\) estimation demonstrated in this study could be applied to other crops to support precision water management.
Data availability
No datasets were generated or analysed during the current study.
References
Acharya BS, Bhandari M, Bandini F et al (2021) Unmanned Aerial vehicles in Hydrology and Water Management: applications, challenges, and perspectives. Water Resour Res 57. https://doi.org/10.1029/2021WR029925. e2021WR029925
Allen RG, Tasumi M, Morse A et al (2007) Satellite-Based Energy Balance for Mapping Evapotranspiration with Internalized Calibration (METRIC)—Applications. Journal of Irrigation and Drainage Engineering 133:395–406. https://doi.org/10.1061/(asce)0733-9437(2007)133:4(395)
Anderson M, Gao F, Knipper K et al (2018) Field-scale assessment of land and water use change over the California delta using remote sensing. Remote Sens (Basel). https://doi.org/10.3390/rs10060889
Barbedo JGA (2019) A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones 2019, Vol 3, Page 40 3:40. https://doi.org/10.3390/DRONES3020040
Bastiaanssen W (1995) Regionalization of surface flux densities and moisture indicators in composite terrain
Bastiaanssen WGM (2000a) SEBAL-based sensible and latent heat fluxes in the irrigated Gediz Basin, Turkey. J Hydrol (Amst). https://doi.org/10.1016/S0022-1694(99)00202-4
Bastiaanssen WGM (2000b) SEBAL-based sensible and latent heat fluxes in the irrigated Gediz Basin, Turkey. J Hydrol (Amst) 229:87–100. https://doi.org/10.1016/s0022-1694(99)00202-4
Bastiaanssen WGM EJMNHPGDRGA (2005) SEBAL for spatially distributed ET under actual management and growing conditions. ASCE J Irrig Drain Eng 131:85–93
Bastiaanssen WGM, Menenti M, Feddes RA, Holtslag AAM (1998) A remote sensing surface energy balance algorithm for land (SEBAL): 1. Formulation. J Hydrol (Amst). https://doi.org/10.1016/S0022-1694(98)00253-4
Bellvert J, Nieto H, Pelechá A et al (2021) Remote sensing Energy Balance Model for the Assessment of Crop Evapotranspiration and Water Status in an Almond Rootstock Collection. Front Plant Sci 12:288. https://doi.org/10.3389/fpls.2021.608967
Benedetti R, Rossini P (1993) On the use of NDVI profiles as a tool for agricultural statistics: the case study of wheat yield estimate and forecast in Emilia Romagna. Remote Sens Environ 45:311–326. https://doi.org/10.1016/0034-4257(93)90113-C
Cammarano D, Jamshidi S, Hoogenboom G et al (2022) Processing tomato production is expected to decrease by 2050 due to the projected increase in temperature. Nature Food 2022 3:6 3:437–444. https://doi.org/10.1038/s43016-022-00521-y
Cancela JJ, González XP, Vilanova M, Mirás-Avalos JM (2019) Water management using drones and satellites in agriculture. Water (Switzerland
Cao C, Lee X, Muhlhausen J et al (2018) Measuring Landscape Albedo Using Unmanned Aerial Vehicles. Remote Sensing 2018, Vol 10, Page 1812 10:1812. https://doi.org/10.3390/RS10111812
Chandel AK, Molaei B, Khot LR et al (2020) High resolution geospatial evapotranspiration mapping of irrigated field crops using multispectral and thermal infrared imagery with metric energy balance model. https://doi.org/10.3390/drones4030052. Drones
Chávez JL, Howell TA, Copeland KS (2009) Evaluating eddy covariance cotton ET measurements in an advective environment with large weighing lysimeters. Irrig Sci 28:35–50
Delavarpour N, Koparan C, Nowatzki J et al (2021) A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sensing 2021, Vol 13, Page 1204 13:1204. https://doi.org/10.3390/RS13061204
Ebert LA, Talib A, Zipper SC et al (2022) Ping evapotranspiration from remotely ferent elevations. Remote Sens (Basel) 14:1660. https://doi.org/10.3390/rs14071660
Hartz TK, Bottoms TG (2009) Nitrogen requirements of drip-irrigated Processing Tomatoes. HortScience 44:1988–1993. https://doi.org/10.21273/HORTSCI.44.7.1988
Heidbach K, Schmid HP, Mauder M (2017) Experimental evaluation of flux footprint models. Agric Meteorol 246:142–153. https://doi.org/10.1016/j.agrformet.2017.06.008
Hessels T, van Opstal J, Trambauer P et al (2017) pySEBAL Version 3.3. 7
Hirschi M, Michel D, Lehner I, Seneviratne SI (2017) A site-level comparison of lysimeter and eddy covariance flux measurements of evapotranspiration. Hydrol Earth Syst Sci 21:1809–1825. https://doi.org/10.5194/hess-21-1809-2017
Hoffmann H, Jensen R, Thomsen A et al (2016) Crop water stress maps for an entire growing season from visible and thermal UAV imagery. https://doi.org/10.5194/bg-13-6545-2016. Biogeosciences
Jaafar HH, Ahmad FA (2020) Time series trends of Landsat-based ET using automated calibration in METRIC and SEBAL: the Bekaa Valley, Lebanon. Remote Sens Environ 238:111034. https://doi.org/10.1016/j.rse.2018.12.033
Kenny JF, Barber NL, Hutson SS et al (2009) Estimated use of water in the United States in 2005. US Geol Surv Circular 1–50. https://doi.org/10.3133/CIR1441
Kustas WP, Norman JM (1996) Use of remote sensing for evapotranspiration monitoring over land surfaces. Hydrol Sci J. https://doi.org/10.1080/02626669609491522
Li ZL, Tang R, Wan Z et al (2009) A review of current methodologies for Regional Evapotranspiration Estimation from remotely sensed data. Sens (Basel) 9:3801. https://doi.org/10.3390/S90503801
Li ZL, Tang BH, Wu H et al (2013) Satellite-derived land surface temperature: current status and perspectives. Remote Sens Environ
Liu C, Zhang X, Zhang Y (2002) Determination of daily evaporation and evapotranspiration of winter wheat and maize by large-scale weighing lysimeter and micro-lysimeter. Agric Meteorol 111:109–120. https://doi.org/10.1016/S0168-1923(02)00015-1
Madakarah NY, Supriatna, Wibowo A et al (2019) Variations of Land Surface Temperature and Its Relationship with Land Cover and Changes in IPB Campus, Dramaga Bogor 2013–2018. In: E3S Web of Conferences
Meza K, Torres-Rua AF, Hipps L et al (2023) Spatial estimation of actual evapotranspiration over irrigated turfgrass using sUAS thermal and multispectral imagery and TSEB model. Irrig Sci. https://doi.org/10.1007/s00271-023-00899-y
Miralles DG, Holmes TRH, De Jeu RAM et al (2011) Global land-surface evaporation estimated from satellite-based observations. Hydrol Earth Syst Sci 15:453–469. https://doi.org/10.5194/hess-15-453-2011
Moncrieff JB, Massheder JM, De Bruin H et al (1997) A system to measure surface fluxes of momentum, sensible heat, water vapour and carbon dioxide. J Hydrol (Amst) 188–189:589–611. https://doi.org/10.1016/S0022-1694(96)03194-0
Montibeller AG (2017) Estimating energy fluxes and evapotranspiration of corn and soybean with an unmanned aircraft system in Ames, Iowa. Electronic Theses and Dissertations 416
Nicolini G, Fratini G, Avilov V et al (2017) Performance of eddy-covariance measurements in fetch-limited applications. Theor Appl Climatol. https://doi.org/10.1007/s00704-015-1673-x
Park S, Ryu D, Fuentes S et al (2021) Mapping very-high-resolution evapotranspiration from unmanned aerial vehicle (UAV) imagery. ISPRS Int J Geoinf 10. https://doi.org/10.3390/ijgi10040211
Pathak TB, Stoddard CS (2018) Climate change effects on the processing tomato growing season in California using growing degree day model. Model Earth Syst Environ 4:765–775. https://doi.org/10.1007/s40808-018-0460-y
Peddinti SR, Kisekka I (2022) Estimation of turbulent fluxes over almond orchards using high-resolution aerial imagery with one and two-source energy balance models. Agric Water Manag 269:107671. https://doi.org/10.1016/j.agwat.2022.107671
Peddinti SR, Kambhammettu BVNP, Rodda SR et al (2020) Dynamics of Ecosystem Water Use Efficiency in Citrus orchards of Central India using Eddy Covariance and Landsat measurements. https://doi.org/10.1007/s10021-019-00416-3. Ecosystems 23:
Prueger JH, Hatfield JL, Aase JK, Pikul JL (1997) Bowen-ratio comparisons with lysimeter evapotranspiration. Agron J. https://doi.org/10.2134/agronj1997.00021962008900050004x
Raza A, Hu Y, Acharki S et al (2023) Evapotranspiration Importance in Water resources Management through Cutting-. Edge Approaches of Remote Sensing and Machine Learning Algorithms
Saboori M, Mokhtari A, Afrasiabian Y et al (2021) Automatically selecting hot and cold pixels for satellite actual evapotranspiration estimation under different topographic and climatic conditions. Agric Water Manag 248:106763. https://doi.org/10.1016/J.AGWAT.2021.106763
Senay GB, Leake S, Nagler PL et al (2011) Estimating basin scale evapotranspiration (ET) by water balance and remote sensing methods. Hydrol Process 25:4037–4049. https://doi.org/10.1002/hyp.8379
Sepulcre-Canto G, Zarco-Tejada PJ, Jimenez-Berni JA et al (2007) Detecting crop irrigation status in orchard canopies with airborne and ASTER thermal imagery. In: 2007 IEEE International Geoscience and Remote Sensing Symposium. pp 3643–3646
Simpson JE, Holman FH, Nieto H et al (2022) UAS-based high resolution mapping of evapotranspiration in a Mediterranean tree-grass ecosystem. Agric Meteorol 321. https://doi.org/10.1016/j.agrformet.2022.108981
Singh Rawat K, Kumar Singh S, Bala A, Szabó S (2019) Estimation of crop evapotranspiration through spatial distributed crop coefficient in a semi-arid environment. Agric Water Manag 213:922–933. https://doi.org/10.1016/J.AGWAT.2018.12.002
Sogachev A, Panferov O, Gravenhorst G, Vesala T (2005) Numerical analysis of flux footprints for different landscapes. Theor Appl Climatol 80. https://doi.org/10.1007/s00704-004-0098-8
Sozzi M, Kayad A, Gobbo S et al (2021) Economic Comparison of Satellite, Plane and UAV-Acquired NDVI images for site-specific Nitrogen application: observations from Italy. https://doi.org/10.3390/agronomy11112098. Agronomy 11:2098
Su Z (2002) The Surface Energy Balance System (SEBS) for estimation of turbulent heat fluxes. Hydrol Earth Syst Sci 6:85–99. https://doi.org/10.5194/hess-6-85-2002
Subedi A, Chávez JL (2015) Crop evapotranspiration (ET) Estimation models: a review and discussion of the Applicability and limitations of ET methods. J Agric Sci 7:50–68. https://doi.org/10.5539/jas.v7n6p50
Taheri M, Mohammadian A, Ganji F et al (2022) Energy-Based Approaches in Estimating Actual Evapotranspiration Focusing on Land Surface Temperature: A Review of Methods, Concepts, and Challenges. Energies (Basel) 15
Tasumi M TTRGAJLW (2005) Operational aspects of satellite-based energy balance models for irrigated crops in the semi-arid U.S. J Irrig Drain Syst 19:355–376
Thapa S, Rudd JC, Xue Q et al (2019) Use of NDVI for characterizing winter wheat response to water stress in a semi-arid environment. J Crop Improv 33:633–648. https://doi.org/10.1080/15427528.2019.1648348
Tunca E (2023) Evaluating the performance of the TSEB model for sorghum evapotranspiration estimation using time series UAV imagery. Irrig Sci. https://doi.org/10.1007/s00271-023-00887-2
USDA (2022) USDA ERS - Irrigation & Water Use. https://www.ers.usda.gov/topics/farm-practices-management/irrigation-water-use/. Accessed 2 Apr 2023
Vesala T, Kljun N, Rannik Ü et al (2008) Flux and concentration footprint modelling: state of the art. Environ Pollut. https://doi.org/10.1016/j.envpol.2007.06.070
Wagle P, Bhattarai N, Gowda PH, Kakani VG (2017) Performance of five surface energy balance models for estimating daily evapotranspiration in high biomass sorghum. ISPRS J Photogrammetry Remote Sens. https://doi.org/10.1016/j.isprsjprs.2017.03.022
Wang W, Smith JA, Ramamurthy P et al (2016a) On the correlation of water vapor and CO2: application to flux partitioning of evapotranspiration. Water Resour Res 52. https://doi.org/10.1002/2015WR018161
Wang Z, Erb AM, Schaaf CB et al (2016b) Early spring post-fire snow albedo dynamics in high latitude boreal forests using Landsat-8 OLI data. Remote Sens Environ 185:71–83. https://doi.org/10.1016/J.RSE.2016.02.059
Warziniack T, Arabi M, Brown TC et al (2022) Projections of Freshwater Use in the United States under Climate Change. Earths Future 10. https://doi.org/10.1029/2021EF002222. e2021EF002222
Webb EK, Pearman GI, Leuning R (1980) Correction of flux measurements for density effects due to heat and water vapour transfer. Q J R Meteorol Soc 106:85–100. https://doi.org/10.1002/qj.49710644707
Wei H, Xia Y, Mitchell KE, Ek MB (2013) Improvement of the Noah land surface model for warm season processes: evaluation of water and energy flux simulation. Hydrol Process 27. https://doi.org/10.1002/hyp.9214
Williams DG, Cable W, Hultine K et al (2004) Evapotranspiration components determined by stable isotope, sap flow and eddy covariance techniques. Agric Meteorol 125:241–258. https://doi.org/10.1016/j.agrformet.2004.04.008
Wilson K, Goldstein A, Falge E et al (2002) Energy balance closure at FLUXNET sites. Agric Meteorol 113:223–243. https://doi.org/10.1016/S0168-1923(02)00109-0
Xia T, Kustas WP, Anderson MC et al (2016) Mapping evapotranspiration with high-resolution aircraft imagery over vineyards using one-and two-source modeling schemes. Hydrol Earth Syst Sci 20:1523–1545. https://doi.org/10.5194/hess-20-1523-2016
Xue J, Bali KM, Light S et al (2020a) Evaluation of remote sensing-based evapotranspiration models against surface renewal in almonds, tomatoes and maize. Agric Water Manag. https://doi.org/10.1016/j.agwat.2020.106228
Xue J, Bali KM, Light S et al (2020b) Evaluation of remote sensing-based evapotranspiration models against surface renewal in almonds, tomatoes and maize. Agric Water Manag 238:106228. https://doi.org/10.1016/j.agwat.2020.106228
Zhao L, Xia J, Xu Cyu et al (2013) Evapotranspiration estimation methods in hydrological models. J Geog Sci 23. https://doi.org/10.1007/s11442-013-1015-9
Zhao J, Chen X, Zhang J et al (2019) Higher temporal evapotranspiration estimation with improved SEBS model from geostationary meteorological satellite data. Scientific Reports 2019 9:1 9:1–15. https://doi.org/10.1038/s41598-019-50724-w
Acknowledgements
This study was supported by the USDA NRCS CEAP Award # NR193A750023C016, and USDA NIFA Award # 2021-68012-35914. We are grateful to the Button and Turkovich Farms for allowing us to conduct research on their farm.
Author information
Authors and Affiliations
Contributions
SP: Conceptualization, data collection, analysis, wrote first draftFN: Data collection and analysisIA: Conceptualization, data analysisIK: Conceptualization, data analysis, writing, reviewing, fundingAll authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Peddinti, S.R., Nicolas, F., Raij-Hoffman, I. et al. Evapotranspiration estimation using high-resolution aerial imagery and pySEBAL for processing tomatoes. Irrig Sci (2024). https://doi.org/10.1007/s00271-024-00943-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00271-024-00943-5