
Abstract
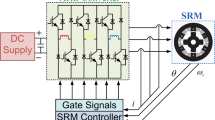
A second-order-generalized-integrator (SOGI)-based frequency-locked-loop (FLL) equivalent proportional-resonant (PR) current controller is introduced in this paper to minimize torque ripple in switched reluctance motor (SRM) drive system. The typical cascaded closed-loop speed control of SRM comprises a speed controller giving desired torque, a static look-up table mapping the desired torque to desired/reference phase currents of SRM, and a current controller to track the reference phase currents. It is often seen that conventional current controllers like hysteresis controllers, proportional-integral (PI) controllers, and even intelligent controllers such as fuzzy logic controllers and model predictive direct torque controllers (MPDTC) are not very effective in minimizing the torque pulsations for a wide range of operating scenarios. The proposed SOGI-FLL-PR-based current control strategy is aimed at improving torque control under a wide range of operations of SRM. The performance of the proposed current controller has been compared to that of traditional current controllers like the hysteresis controller, the proportional-integral controller, the fuzzy logic current controller (FLCC), and MPDTC; and has shown to be superior in both simulation and experimental studies. Our study details a systematic approach to the dynamic modeling of SRMs, control strategy formulation, dynamic analysis, and experimental verification.



































Similar content being viewed by others

Data availability
Not applicable.
References
Ding W, Yang S, Yanfang Hu, Li S, Wang T, Yin Z (2017) Design consideration and evaluation of a 12/8 high-torque modular-stator hybrid excitation switched reluctance machine for EV applications. IEEE Trans Ind Electron 64(12):9221–9232
Ebrahimi Y, Feyzi MR (2017) Introductory assessment of a novel high-torque density axial-flux switched reluctance machine. IET Electr Power Appl 11(7):1315–1323
Mousavi-Aghdam SR, Feyzi MR, Bianchi N, Morandin M (2015) Design and analysis of a novel high-torque stator-segmented SRM. IEEE Trans Ind Electron 63(3):1458–1466
Castano SM, Bilgin B, Fairall E, Emadi A (2015) Acoustic noise analysis of a high-speed high-power switched reluctance machine: frame effects. IEEE Trans Energy Convers 31(1):69–77
Gan C, Jianhua Wu, Sun Q, Kong W, Li H, Yihua Hu (2018) A review on machine topologies and control techniques for low-noise switched reluctance motors in electric vehicle applications. IEEE Access 6:31430–31443
Song S, Ge L, Ma S, Zhang M, Wang L (2014) Accurate measurement and detailed evaluation of static electromagnetic characteristics of switched reluctance machines. IEEE Trans Instrum Meas 64(3):704–714
Uddin W, Husain T, Sozer Y, Husain I (2016) Design methodology of a switched reluctance machine for off-road vehicle applications. IEEE Trans Ind Appl 52(3):2138–2147
Hu K-W, Yi P-H, Liaw C-M (2015) An EV SRM drive powered by battery/supercapacitor with G2V and V2H/V2G capabilities. IEEE Trans Industr Electron 62(8):4714–4727
Husain I (2002) Minimization of torque ripple in SRM drives. IEEE Trans Industr Electron 49(1):28–39
Rahman KM, Fahimi B, Suresh G, Rajarathnam AV, Ehsani M (2000) Advantages of switched reluctance motor applications to EV and HEV: design and control issues. IEEE Trans Ind Appl 36(1):111–121
Hannoun H, Hilairet M, Marchand C (2010) Design of an SRM speed control strategy for a wide range of operating speeds. IEEE Trans Ind Electron 57(9):2911–2921
Mademlis C, Kioskeridis I (2009) Gain-scheduling regulator for high-performance position control of switched reluctance motor drives. IEEE Trans Ind Electron 57(9):2922–2931
Inderka RB, DeDoncker RWAA (2003) DITC-direct instantaneous torque control of switched reluctance drives. IEEE Trans Ind Appl 39(4):1046–1051
Islam MS, Anwar MN, Husain I (2003) Design and control of switched reluctance motors for wide-speed-range operation. IEE Proc Electr Power Appl 150(4):425–430
Bilgin B, Jiang JW, Emadi A (2019) Switched reluctance motor drives fundamentals to applications. CRC Press, USA
Tsai M-F, Quy TP, Wu B-F, Tseng C-S (2011) Model construction and verification of a BLDC motor using MATLAB/SIMULINK and FPGA control. In: 2011 6th IEEE Conference on Industrial Electronics and Applications, pp 1797–1802. IEEE
Gobbi R, Sahoo NC, Vejian R (2008) Experimental investigations on computer-based methods for determination of static electromagnetic characteristics of switched reluctance motors. IEEE Trans Instrum Meas 57(10):2196–2211
Ye J, Bilgin B, Emadi A (2015) An offline torque sharing function for torque ripple reduction in switched reluctance motor drives. IEEE Trans Energy Convers 30(2):726–735
Xin Z, Lu M, Loh PC, Blaabjerg F (2016) A new second-order generalized integrator based quadrature signal generator with enhanced performance. In: 2016 IEEE Energy Conversion Congress and Exposition (ECCE), pp 1–7. IEEE
Rodríguez P, Luna A, Candela I, Mujal R, Teodorescu R, Blaabjerg F (2010) Multiresonant frequency-locked loop for grid synchronization of power converters under distorted grid conditions. IEEE Trans Ind Electron 58(1):127–138
Zhao R, Xin Z, Loh PC, Blaabjerg F (2016) A novel flux estimator based on multiple second-order generalized integrators and frequency-locked loop for induction motor drives. IEEE Trans Power Electron 32(8):6286–6296
De Paula MV, Barros TADS (2021) A sliding mode DITC cruise control for SRM with steepest descent minimum torque ripple point tracking. IEEE Trans Ind Electron 69(1):151–159
Barros TADS, Neto PJDS, De Paula MV, Moreira AB, Filho PSN, Filho ER (2018) Automatic characterization system of switched reluctance machines and nonlinear modeling by interpolation using smoothing splines. IEEE Access 6(2018):26011–26021
Chen T, Cheng G (2022) Comparative investigation of torque-ripple suppression control strategies based on torque-sharing function for switched reluctance motor. CES Trans Electr Mach Syst 6(2):170–178
Sun Q, Jianhua Wu, Gan C (2020) Optimized direct instantaneous torque control for SRMs with efficiency improvement. IEEE Trans Ind Electron 68(3):2072–2082
Song S, Hei R, Ma R, Liu W (2020) Model predictive control of switched reluctance starter/generator with torque sharing and compensation. IEEE Trans Transp Electrif 6(4):1519–1527
Li W, Cui Z, Ding S, Chen F, Guo Y (2021) Model predictive direct torque control of switched reluctance motors for low-speed operation. IEEE Trans Energy Convers 37(2):1406–1415
Funding
The authors have not received any funding.
Author information
Authors and Affiliations
Contributions
MRS did conceptualization, implementations, results in analysis, and wrote the manuscript. NCS contributed to the development of concepts, critical analysis of results, and reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors of this manuscript have no competing interests.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Model predictive direct torque control (MPDTC) method
SRM ought to investigate model predictive direct torque control (MPDTC) to lessen torque ripple in the low-speed range given that the switching frequency will be high at higher speed and result in a larger torque ripple. In this study, MPDTC [27] replaces conventional direct torque control (DTC) with double hysteresis control to eliminate torque pulsation and boost SRM performance. To reduce torque ripple, traditional MPDTC cost functions include total torque. To minimize torque ripple, this torque control strategy distributes the total electromagnetic torque to each phase using a cubic torque sharing function. Figure 34 shows the MATLAB/Simulink architecture used to create the MPDTC control system for the SRM drive experimental verification platform.
1.2 Voltage vector selection
Phases A, B, and C are the voltage vector's operational states. Figure 35 shows the eight sectors V0-V7 that make up the space voltage vectors area, with the basic space voltage vectors represented by N1–N8. The suitable space voltage vectors can control the flux linkage and torque. Additionally, Table 8 has a listing of the voltage vectors in space that are shown in Fig. 35.
1.3 Torque predictive model for SRM
The standard equation for the phase voltage is as follows:
where \(v_{q}\), \(R\), \(i_{q}\), and \(\theta_{q}\) are denoted as phase voltage, phase resistance, phase current, and phase rotor position, respectively. \(\lambda_{q}\) is the phase flux, which depends on the phase current and the rotor position.
The dynamic model (28) could be modified in the following ways to facilitate the development of a torque predictive model:
where \(\omega\) is the rotor speed. The digital device operates in discrete time. As a result, the continuous-time model must be transformed into a discrete-time model.
We can determine the phase torque at the (k + 1) instant by predicting the phase current and rotor position at the kth step. Once the cost function is defined, it may be used to pick the best vector for controlling the voltage.
1.4 Hysteresis current control
The full negative DC link voltage (\(- V_{{{\text{dc}}}}\)), chosen based on motor voltage rating, is applied by the hysteresis current controller across a phase winding during turn-off. The hysteresis current controller generates switching signals, which are fed to the asymmetric bridge converter to switch the DC link voltage for regulating the phase currents. To maintain the phase current at the computed \(i_{{{\text{ref}}{.}}}\), a hysteresis band is defined by \(i_{{{\text{upper}}}}\) and \(i_{{{\text{lower}}}}\). These values are calculated based on \(i_{{{\text{ref}}{.}}}\) and a tolerance band \(\alpha\), as shown in (Eq. 33). Generally, \(\alpha\) is given as a percentage of the current reference, \(i_{{{\text{ref}}{.}}}\).
Hysteresis control of phase current is implemented using soft (unipolar) switching strategy [15], at time step k, as shown in Eq. 34.
where the sign “\(\parallel\)”denotes provided and the symbol “\(\cap\)” represents logical.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sial, M.R., Sahoo, N.C. Torque ripple minimization in SRM drive using second-order-generalized-integrator-based FLL equivalent PR current controller. Electr Eng 105, 2421–2441 (2023). https://doi.org/10.1007/s00202-023-01811-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00202-023-01811-9