
Abstract
This paper considers pure strategy Nash equilibria of non-cooperative legislative bargaining models. In contrast to existing legislative bargaining models, we derive legislators behavior from stochastic utility maximization. This approach allows us to prove the existence of a stationary Pure Local and Global Nash Equilibrium under rather general settings. The mathematical proof is based on a fixed point argument, which can also be used as a numerical method to determine an equilibrium. We characterize the equilibrium outcome as a lottery of legislators’ proposals and prove a Mean Voter Theorem, i.e., proposals result dimension-by-dimension as a weighted mean of legislators’ ideal points and are Pareto-optimal. Based on a simple example, we illustrate different logic of our model compared to mixed strategy equilibrium of the legislative bargaining model suggested by Banks and Duggan (Am Polit Sci Rev 94(1):73–88. https://doi.org/10.2307/2586381, 2000).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Analyzing public policy in real-world political systems continues to be a challenge even in the present day. The standard approach for modeling public policy choices is the spatial model of politics, where legislators are required to select an alternative from a compact, convex subset of multidimensional Euclidean space. The median voter theorem (Black 1958 and Downs 1957) provides compelling predictions when policies are confined to a single dimension. However, social choice theory has yielded discouraging results regarding the existence of majority rule equilibria in multiple dimensions (Plott 1967; McKelvey and Schofield 1987; Davis et al. 1972). More recently, a non-cooperative theory of bargaining, derived from Rubinstein (1982) in 1982, has been proposed as a promising approach to overcome this challenge. Baron and Ferejohn (1989) introduced the non-cooperative legislative bargaining model, which has gained attention. In particular, the theory of legislative bargaining on distributive politics has been extensively developed (Jackson and Moselle 2002; Baron 1996; Snyder et al. 2005; Diermeier and Feddersen 1998). Numerous theoretical analyses have been built upon this work, including (Harrington 1989, 1990a, b; Calvert and Dietz 2005; Winter 1996; Merlo and Wilson 1995; Eraslan and Merlo 2002; Cho and Duggan 2003). However, analyzing distributive politics with this model neglects essential features of collective choice situations that are highly relevant in real political systems and organizations. Specifically, it focuses on particularistic programs (such as pork barrel projects) while disregarding collective good programs (Baron 1996). To address this limitation, Banks and Duggan (2000) extended Baron and Ferejohn’s original legislative bargaining model by incorporating spatial preferences and allowing for applications to collective good programs that dominate real-world policymaking.Footnote 1 Nonetheless, even when applying Banks and Duggan (2000) extended model to real-life policymaking, limitations persist due to specific and restricted assumptions.
Firstly, to address the problem of non-existent equilibria in a multidimensional policy space, existing game theoretical models often resort to considering mixed strategy equilibria. Computation of such equilibria is often tedious or even impossible, especially when assuming many legislators and policy dimensions (Banks and Duggan 2000). The existence and computation of pure strategy equilibria can only be proven for a limited class of environments that are seldom found in real-world policymaking.
Secondly, a common assumption in legislative bargaining models, including Banks and Duggan (2000) and Baron and Ferejohn (1989), is that any randomly selected legislator formulating a proposal can accurately predict whether other legislators will accept or reject the suggested proposal, with the latter decision solely dependent on formulated policy positions. However, empirical evidence from political practice suggests that voting on legislative proposals in parliament is often more complex and influenced by factors that are partially unobservable to the proposer. Therefore, proposers are often unable to predict future behavior with perfect certainty, and voting behavior of legislators appears to be probabilistic. For instance, proposals are often presented as packages that include other unobserved attributes beyond the suggested policy position. These attributes may involve moral or ideological justifications of policies (Carey 2008) or side payments resulting from party discipline (Huber 1996; Hollyer et al. 2022). Furthermore, a legislator’s choices may be influenced by various psychological factors (Burden and Frisby 2004; Burden 2007; Carey 2008).
At a theoretical level, the approaches mentioned above reflect a broader criticism of classical economic theory regarding the assumption of homo economicus, which suggests that individuals always choose objects that maximize their utility. Classical economic theory traditionally excluded psychological factors, such as whims and perceptions, from playing a formal role in the utility maximization process (McFadden 1980, 1981). In response to this criticism, scholars, including Daniel McFadden, developed probabilistic choice theory, which demonstrates that unobserved psychological factors introduce a random element into economic decision-making. While maintaining the key assumption of utility maximization, this random element in individual choices arises from the existence of unmeasured attributes of choice options that, from an observer’s standpoint, are stochastic (McFadden 1980, 1981).
In related work, scholars have introduced probabilistic voting to address the non-existence of equilibria in the Downs model within a multidimensional policy space (Davis and Hinich 1966; Hinich et al. 1973; Coughlin and Nitzan 1981; Coughlin 1982; Coughlin and Palfrey 1985). Additionally, Schofield and Sened (2002) proposed the concept of pure local Nash equilibrium as an alternative solution to the non-existence of equilibria in spatial models of politics. Schofield (2007) further extended this idea by deriving a Mean Voter Theorem as a generalized version of Downs’ Median Voter Theorem, incorporating probabilistic voting theory and the concept of pure local Nash equilibrium.
In this paper, we present a non-cooperative legislative bargaining model that captures the legislative process as a sequence of proposal-making and voting stages within an infinitely repeated, non-cooperative game. Building upon the framework developed by Banks and Duggan (2000), we extend the model to encompass a general multidimensional policy space. Similar to Baron and Ferejohn (1989), we assume that the proposer is randomly selected in each period.
In contrast to many existing applications of legislative bargaining theory, we adopt the approach proposed by Banks and Duggan (2006) by considering the status quo as an arbitrary policy. If a proposal is rejected, the process advances to the next period (round) with a specific probability. However, with the complementary probability, the process terminates, and the outcome of the game becomes the status quo. Furthermore, it is essential to acknowledge that real-life legislative systems often encounter limitations in terms of administrative or time capacities, which can lead to decision-making processes being halted without reaching a conclusive outcome.
However, in contrast to the approaches of Banks and Duggan (2000) and Baron and Ferejohn (1989), we adopt the extended choice theory proposed by McFadden (1980, 1981). In our model, we explicitly derive legislators’ strategic behavior from random utility maximization, which implies that voting becomes probabilistic. As a result, in each period, a single proposal is accepted or rejected with a certain probability.
This manuscript is organized as follows: In Sect. 2, we introduce a comprehensive legislative bargaining model involving a finite number of legislators. The model is built upon the majority voting rule of coalitions. Specifically, we derive legislative behavior by incorporating stochastic utility maximization and establish the corresponding pure local and global Nash equilibria of the game.
In Sect. 3, we present the mathematical framework for establishing the existence of both local and global Nash equilibria in our model. The central idea is to define a Nash equilibrium as a fixed point within the mathematical formulation. To utilize the fixed point theorem of Brouwer effectively, we construct a suitable closed convex subset of the set of proposals. We develop first- and second-order optimality conditions for a local Nash equilibrium and demonstrate that these conditions are also sufficient for a global Nash equilibrium, provided that the voting responses remain sufficiently low. To streamline the presentation, we relegate the more technical proofs to the appendix. Additionally, we discuss a computational procedure for numerically calculating Nash equilibria in our game, facilitating practical implementation and analysis.
In Sect. 4, we examine the scenario of weighted spatial preferences and establish the Mean Voter Theorem. This theorem provides a characterization of general equilibrium outcomes as a weighted mean of legislators’ dimension-specific ideal points.
Section 5 introduces a straightforward example that facilitates an intuitive understanding of the fundamental logic of our game. We compare this example to the original game proposed by Banks and Duggan (2000) and present simulated equilibrium outcomes for both games, aiding in the comprehension of their dynamics.
2 The model
In accordance with the legislative bargaining model proposed by Banks and Duggan (2000), we define a legislative bargaining game as follows: Let \({{\mathcal {X}}}\subset {\mathbb {R}}^m\) denote a non-empty, compact, convex set of alternatives, where \(m \in {\mathbb {N}}\) represents the number of dimensions. Consider a set of legislators denoted by \(N = \{1,..., n\}\), with \(n \ge 2\). Each legislator \(i \in N\) possesses preferences characterized by a continuously differentiable and concave von Neumann-Morgenstern utility function \(U_i: {{\mathcal {X}}}\rightarrow {\mathbb {R}}\). The objective is for the legislators to collectively choose an alternative \(x \in {{\mathcal {X}}}\). The collective decision is made based on an externally determined voting rule.Footnote 2
The temporal framework of our legislative bargaining model is defined as follows:
-
a.
In each period \(t \in \{ 1, 2, \ldots \}\), legislator \(i \in N\) is recognized with a probability \(q_i\). Here, \(q = (q_1, q_2, \ldots , q_n)\) belongs to \(\varDelta\), the unit simplex in \({\mathbb {R}}^n\).
-
b.
When recognized, legislator i selects a policy \(x_i \in {{\mathcal {X}}}\) and formulates a proposal, which is then submitted to the legislature.
-
c.
Upon the submission of a proposal to the legislature, all legislators \(j \in N\) simultaneously vote under a specified voting rule to either accept or reject the proposal.
-
d.
If the proposal \(x_i\) is accepted, the game ends.
-
e.
If the proposal is rejected, two alternatives arise:
-
e1:
With a probability \(q_0 \in [0, 1]\), the status quo \(x_0 \in {{\mathcal {X}}}\) is selected, and the game concludes.
-
e2:
With a probability of \(1 - q_0\), the game continues to the next period \(t+1\), and the process is repeated starting from step (a).
-
e1:
The probability that legislator i is chosen to make a proposal is denoted by \(q_i \in (0, 1]\), satisfying the relation \(\sum _{i=1}^n q_i = 1\). Additionally, the conditional probability that the game ends with the selection of the status quo after each round in which a proposal has been rejected is given by \(q_0 \in [0, 1]\).
We consider an infinite horizon game without discounting. Following the approach of Baron and Ferejohn (1989) as well as Banks and Duggan (2000), the solution concept utilized is a stationary equilibrium. Under this concept, strategies are stationary, meaning that each player employs history-independent strategies at all proposal-making stages. To avoid unnecessary complexity, we provide a formal definition only for stationary strategies. A pure stationary strategy for legislator \(i \in N\) consists of a proposal \(x_i \in {{\mathcal {X}}}\) offered whenever legislator i is recognized, along with a voting rule.
While our setup initially follows the framework of Banks and Duggan (2000), we depart from the conventional assumption found in most existing bargaining models, including the legislative bargaining model of Baron and Ferejohn (1989). Unlike those models, we do not assume that legislators who have been selected to formulate a proposal can accurately predict whether other legislators will accept or reject their suggested proposal. Instead, we acknowledge a common observation in political practice that legislators often lack the ability to predict future behavior with absolute certainty. Voting behavior among legislators tends to exhibit probabilistic tendencies (Burden and Frisby 2004; Burden 2007; Carey 2008). Therefore, the overall acceptance of submitted proposals also becomes stochastic at the approval stage (c).
Accordingly, in our game, a stationary pure strategy for a legislator \(i \in N\) consists of a proposal \(x_i \in {{\mathcal {X}}}\) suggested anytime legislator i is recognized, as well as a measurable decision rule or, equivalently, an acceptance set. We denote individual probabilistic decision rules as \(\pi _{ij}:{\mathbb {R}}\rightarrow [0,1]\). Let \(\sigma _i = (x_i, \pi _i)\) represent a stationary strategy for legislator i, while \(\sigma = (\sigma _1, \ldots , \sigma _i, \ldots , \sigma _n)\) represents a profile of stationary strategies for all legislators.
In the following subsections, we develop our legislative bargaining model incorporating probabilistic acceptance rules. Specifically, in Sect. 2.1, we establish a micro-political foundation for probabilistic acceptance of proposals. We derive individual probabilistic acceptance rules based on stochastic utility maximization. In Sect. 2.2, we determine the overall probability of accepting a proposed policy, assuming that the legislature operates under a majority voting rule. In Sect. 2.3, we derive individual best response strategies and define both local and global Nash equilibria for our game.
2.1 Probabilistic voting
By maintaining the fundamental assumption of utility maximization, the introduction of a random element in individual choices arises from the presence of unmeasured attributes of choice options that are inherently stochastic, at least from an observer’s perspective (McFadden 1980, 1981). In order to incorporate the influence of unobserved factors on legislators’ evaluation and formulation of proposals, our legislative bargaining model considers that, in addition to the proposed policy dimensions, the utility derived by legislators depends on a set of other unobservable factors. These factors are not known to the legislator who formulates a proposal.
This includes the presence of unobserved psychological factors that can influence a legislator’s evaluation of a proposal, as well as intrinsic attributes of the proposal itself (Burden and Frisby 2004; Burden 2007; Carey 2008). In addition to the formulated policy position, the evaluation of a proposal by legislators may depend on other intrinsic attributes that emerge during the process of proposal formulation. To formalize this concept, we consider the formulation of a proposal as a production process, where the policy position serves as the main input transformed into a legislative act. This act includes not only the suggested policy position but also other intrinsic attributes, such as the technical implementation details and moral or ideological justifications. For simplicity, we use the index \(\kappa\) to represent the aggregated outputs generated during the formulation process, which we interpret as the quality of the formulated proposal. Thus, a formulated proposal can be represented as an output bundle \((x, \kappa )\). However, the act of producing a high-quality proposal, involving convincing technical implementation or appealing ideological justifications, can be seen as a creative process influenced by stochastic factors that are partly beyond the control of the proposing legislator. As a result, the quality of the proposal becomes a stochastic output of the formulation process. Furthermore, assessing the quality of a proposal and deriving utility from a complete output bundle \((x, \kappa )\) may depend on additional unobserved factors that influence legislators’ evaluations. These factors are unknown to the legislator at the time of proposal formulation. Drawing upon the random utility theory, these factors can include psychological elements or external benefits associated with specific voting decisions.Footnote 3
Formally, when assuming the existence of unobservable factors, it implies that conditional preferences over observed attributes of individual legislators can vary. According to random utility maximization (RUM), each individual actor can be viewed as a utility maximizer in the classical sense, given their specific state of mind. However, their state of mind varies randomly from one choice situation to the next. Consequently, based on the distribution of these unobservable factors, it is possible to derive a probability distribution over conditional utility functions. This distribution captures the likelihood of an individual actor making a particular choice while maximizing their stochastic utility. In the context of a proposal based on the policy position x put forward by legislator i, let \(\delta _i \in {\mathbb {R}}^m\) represent a vector of additional observed attributes related to the proposal. These attributes can include characteristics of the formulated proposals as well as characteristics of the individual legislator who is evaluating alternative proposals, or transformations of these characteristics. As demonstrated by McFadden (1981) with almost no loss of generality, the stochastic utility function \(U_{ji}\) of another legislator j in assessing their utility for the proposal x put forward by legislator i can be assumed to be additively separable:
where \(\xi \in {\mathbb {R}}^m\) is a stochastic vector of taste weights with expectation \({\mathbb {E}}(\xi )\).Footnote 4
Under this assumption, let us consider a randomly selected legislator \(i \in N\) who formulates a proposal x with a vector \(\delta _i\) of observable attributes of this alternative. We denote the utility that legislator j derives from proposal x as \(u_{ji}:= U_{ji}(x,\xi )\), and let \(v_j \in {\mathbb {R}}\) represent the default utility that legislator j receives if the proposal x is rejected. In accordance with stochastic utility maximization, legislator j will accept the proposal with a probability that depends on drawing a utility \(u_{ji}\) from the utility distribution, such that \(u_{ji} \ge v_j\). Denoting the probability distribution function as \(\phi\), the corresponding probability of accepting a proposal with utility \(u_{ji}\) is given by \(\int _{A_{ij}(U_j(x))}\phi (\xi ) \; d\xi ,\) where \(A_{ij}(u):=\{\xi \in {\mathbb {R}}^n: u+ \delta _i^T \xi \ge v_j\}\). Therefore, from the perspective of the proposer, the acceptance of her proposal by another legislator j given the default utility \(V_j\) becomes probabilistic. In accordance with classical assumptions of random utility maximization (RUM), for specific density functions \(\phi\), this integral is equivalent to an explicit individual probabilistic acceptance rule \(\pi _{ij}:{\mathbb {R}}\rightarrow [0,1]\), which can be derived from a nominal logit function with a scaling parameter \(\alpha _j \ge 0\) (Luce 1959; McFadden 1980).Footnote 5Footnote 6
Thus, we can express the individual probabilistic acceptance rule \(\pi _{ij}\) as follows:
Therefore, the acceptance probability of a proposal is determined by its mean utility, indicating that the probability of legislator j accepting a proposal depends solely on its observable attributes. It is worth noting that the expectation of taste weights, denoted as \({\mathbb {E}}(\xi )\), could be partially or entirely equal to zero. In such cases, acceptance probabilities are solely influenced by the utilities derived from the proposed policy positionsFootnote 7.
Interestingly, if we consider the evaluation of a legislator’s own proposal as a successive decision following its submission, it implies that from the proposer’s viewpoint, the acceptance of their own proposal becomes probabilistic, with the specific probability \(\pi _{ii}\) determined by Equation (2). This follows directly from the assumption that drawings of taste weights (or unobserved factors) are independent for successive decisions (McFadden 1980, 1981).Footnote 8
However, compared to evaluating proposals from other legislators, the evaluation of one’s own proposal is different. Firstly, while other legislators evaluate a proposal after it has been submitted for a final vote, the formulation and evaluation of one’s own proposal is an iterative process. The legislator formulates an initial draft proposal, evaluates it by comparing it to a hypothetical benchmark proposal, and if it is not accepted, revises the formulation until acceptance. In this context, revising the formulation means reformulating the legislative act while keeping the suggested policy position x constant. Following this iterative formulation/reformulation procedure ensures that the probability of drawing taste weights \(\xi\) such that \(\xi \ge {\mathbb {E}}(\xi )\), indicating that the perceived quality of the formulated proposal is above its expected value, approaches one after a sufficiently high number of reformulation rounds. The latter implies that a proposal derived through the iterative formulation procedure (IP) is accepted by the proposer with probability 1 as long as \(U_i(x) + \delta _i^T {\mathbb {E}}(\xi ) \ge V_i\).Footnote 9
2.2 Probabilistic acceptance under majority rule
Let \({\mathcal {D}} \subseteq {\mathcal {P}}(N)\) represent the voting rule, which is a subset of winning coalitions. We impose the condition that a coalition remains winning if an arbitrary legislator joins it:
This property holds for decision rules based on various voting mechanisms, including weighted voting games. In a weighted voting game, individual legislators have weights \(w_i \ge 0\), and a coalition is winning, denoted by \(C \in {\mathcal {D}}\), if \(\sum _{i \in C} w_i \ge {\bar{w}}\), where \({\bar{w}} \ge 0\) is a given winning threshold. Coalitions that fail to reach the quota are called "losing" coalitions. Assuming that proposals are approved by the legislature using a voting rule, the acceptance of proposals becomes a collective decision based on a set of winning coalitions \({\mathcal {D}} \subseteq {\mathcal {P}}(N)\). Thus, given the probabilistic acceptance rules \(\pi _{ij}\), we can define a probability function \(P_i(x,v)\) that assigns a probability to a proposal \(x_i \in {\mathcal {X}}\), proposed by legislator i, being accepted by the panel. Here, \(v \in {\mathbb {R}}^{n}\) represents the vector of default utilities of legislators. Formally, we have:
where \(P_i(x,v)\) corresponds to the probability that a proposal \(x \in {\mathcal {X}}\), proposed by legislator \(i \in N\), is accepted by the legislature. The vector v contains real numbers that, in equilibrium, correspond to legislators’ continuation values, as explained below. In particular, we assume the independence of voting decisions by individual legislators. Under this assumption, the probability that proposal x submitted by legislator i is accepted by the legislature is given byFootnote 10:
where \(\pi _{ij}\) is given by Equation (2).
2.3 Best response strategies and Nash equilibria
2.3.1 Continuation values
The continuation values \(v_i \in {\mathbb {R}}\) of legislator i depend on the expected proposals \(x_0, x_1, \ldots , x_n\) from all individual legislators, as described below. For simplicity, we use matrix notation \({X}= (x_1, \ldots , x_n) \in {\mathcal {X}}^{n} \subset {\mathbb {R}}^{m \times n}\).
We denote the probability of "\(x_i\) being the outcome of the game" as \(Q_i\), where \(i \in N \cup \{0\}\). We have \(\sum _{i=0}^n Q_i = 1\). The probability \(Q_i\) for \(i \in N \cup \{0\}\) should be proportional to the product \(q_i P_i(x_i, i, v)\) because the choice of legislator and the voting process are assumed to be stochastically independent. Specifically, we have \(Q_i = q_i P_i(x_i, v)/c\) and conventionally define \(P_0(x, 0, v):= 1-a\) and \(a:= \sum _{i \in N} q_i P_i(x_i, v)\). Therefore, the real number c is calculated as:
Note that c, a, and \(Q_i\) depend on \(x_0, \ldots , x_N\), and v. Thus, any matrix \(X = (x_1, \ldots , x_n) \in {\mathcal {X}}^n\) of proposals chosen by the legislators defines a probability distribution of a stochastic process over the outcome space \({\mathcal {X}}\).
We denote the continuation value of legislator j throughout the game as \(v_j({X})\). Given stationarity and \({\mathbb {E}}(\xi ) = 0\), it follows that \(v_j = v_j(X)\) satisfies:
Note that the continuation values of legislators correspond to their expected utility, assuming that the legislative bargaining game continues in the next period. Hence, when evaluating future proposals, legislators have yet to observe the stochastic factors that determine their utility. Instead, they have to form expectations about these factors and their implied utility.
The calculation of the continuation value is based on expected taste weights. To simplify notation in this paper, we assume that the expectation of taste weights is zero:
2.3.2 Best reply acceptance rules
To demonstrate that the probabilistic acceptance strategies \([\pi _{ij}]\) correspond to a best response strategy for each individual legislator, we need to establish that they satisfy weak dominance, as defined by Banks and Duggan (2000). Weak dominance implies equilibrium conditions where a legislator \(j \in N\), upon observing the taste weights \(\xi\), accepts a proposal \((x_i, \delta _i)\) if the following condition holds: \(U_j(x_i) +\delta ^T_i \xi \ge v_j.\)
Consequently, in accordance with weak dominance, the probability that legislator j will accept a proposal \((x_i, \delta _i)\) with an individual utility of \(u:= U_j(x_i)\) is determined as specified in equation (2). By introducing specific assumptions about the probability distribution \(\phi\), we can derive the individual best response acceptance strategies for legislator \(i \ne j\) using equation (2). Furthermore, the probability \(P_i(x, v)\) of a proposal being accepted by the legislature can be obtained from equation (4).
2.3.3 Best reply proposal formulation strategies
Next, we turn our attention to the formulation of proposals. Building upon the previous discussions, we assume that proposals put forth by legislators encompass a range of outputs beyond mere policy positions. These additional characteristics contribute to legislators’ utility, and we consider legislators as stochastic utility maximizers with stochastic utility functions as defined in equation (1). Consistent with the existing literature (e.g.,Banks and Duggan 2000), we require that legislators’ best-reply proposal formulation strategies adhere to the principle of sequential rationality. Thus, each legislator \(j \in N\) aims to maximize their expected stochastic utility, given by:
with \(v_j=v_j({X})\). However, the solution to stochastic utility maximization critically depends on which factors a legislator can observe when formulating their proposal. While it is evident that the factors determining the utility of other legislators are generally unobserved by the proposer, the question arises as to which factors determining their own utility a proposer can observe at the time of policy position selection for their proposal formulation. In contrast to voting on a submitted proposal, where a legislator must assess their utility derived from a specific formulated proposal compared to the utility derived from a benchmark proposal, a proposer faced with selecting a policy position as an input for their proposal formulation must assess their expected utility derived from a hypothetically formulated proposal based on the chosen policy position, relative to the expected utility derived from hypothetically formulated proposals based on every other policy position. Since legislators cannot formulate concrete proposals for each policy position, they must base their comparisons on the expected values of taste weights. To simplify notation, we assume \({\mathbb {E}}(\xi ) = 0\) as mentioned earlier. Consequently, the expected stochastic utility derived from a hypothetically formulated policy proposal for all \(x \in {{\mathcal {X}}}\) becomes:
with \(v_j=v_j({X})\). Hence, although both the formulation and acceptance of proposals are derived from stochastic utility maximization in general, it becomes apparent that the selection of a policy position corresponds to deterministic expected utility maximization within the specific assumptions of our legislative bargaining game. On the other hand, voting on submitted policy proposals results in probabilistic choices.
Assuming \({\mathbb {E}}(\xi ) = 0\), the acceptance probabilities \(\pi _{ij}\) become independent of i when \(i \ne j\). In this case, we can simplify the notation and denote the acceptance probability as \(\pi _j(u, v_j)\), given by:
We can now summarize the implications of our assumptions on the formulation of legislators’ proposals in the following proposition:
Proposition 1
We assume that legislators’ preferences for policy proposals can be represented by an additively separable stochastic utility function, as described in equation (1). The selection of a policy position as an input in the proposal formulation (IP) leads to a stochastic best response policy proposal strategy x, which can be obtained by solving the following deterministic maximization problem:
where v is a given vector of continuation values representing the default utility that a proposer realizes if her proposal is rejected. It is important to note that there always exists a solution \(x \in {{\mathcal {X}}}\) to equation (8).
Proof
From (6), we can derive the following expression for the expected stochastic utility:
Therefore, any proposal that maximizes the deterministic expected utility in equation (8) will, with probability 1, also maximize the expected stochastic utility \({\mathbb {E}}(w_i(x,\xi ,v))\). Since \(P_i(\cdot ,v)\) and \(U_i\) are continuous functions, and \({{\mathcal {X}}}\) is a compact set, we can apply the Weierstrass theorem, which guarantees the existence of at least one solution to our maximization problem. \(\square\)
2.3.4 Definition of Nash equilibria
Proposition 1 provides "best reply" strategies for given continuation values \(v\in {\mathbb {R}}^n\). However, since the bargaining model assumes that the continuation values themselves depend on X, i.e., \(v=v(X)\), i.e. each stationary strategy \(X \in {\mathcal {X}}^n\) is mapped into a matrix of best reply strategies. A Nash equilibrium corresponds to a fixed point of this mapping. To simplify this highly nonlinear problem, we first focus on local stationary Nash equilibria, i.e., let \({\tilde{{X}}} \in {\mathcal {X}}^n\) denote the matrix of best reply strategies, where \(\tilde{x_i}\) denotes the i-th column of \({\tilde{{X}}}\) we consider perturbations of the expected utilities \(w_i\) defined as:
and we seek local maxima at \({\hat{{X}}}=({\hat{x}}_1,\ldots ,{\hat{x}}_n)\):
where \({\mathcal {U}}(0)\) represents an arbitrary small neighborhood of the origin, and \({\hat{x}}_i +{\mathcal {U}}(0)\subseteq {{\mathcal {X}}}\) for all \(i\in N\).
Definition 1
A local stationary Nash equilibrium of \(W_i\) for all \(i\in N\) is a matrix \({\hat{{X}}} \in {\mathcal {X}}^n\) such that for all \(i\in N\), a small change in the own strategy \({\hat{x}}_i\) (i.e., the i-th component of \({\hat{{X}}}\)) by adding a small perturbation y does not increase \(W_i\):
Definition 2
A global stationary Nash equilibrium of \(W_i\) is a matrix \({\hat{{X}}} \in {{\mathcal {X}}}^n\) satisfying:
3 Existence of local and global Nash equilibria
In this section, we analyze the necessary and sufficient conditions for the existence of stationary local and global Nash equilibria in our legislative bargaining game.
Informally, a profile \(\sigma\) constitutes a stationary equilibrium if, for every legislator \(i \in N\), the proposal strategy \(x_i\) is optimal given the probabilistic acceptance rules \((\pi _1,...,\pi _n)\) of the other legislators, and individual probabilistic acceptance rules are optimal given that \(\sigma\) describes what would happen if the current proposal were rejected and \(V_j\) is the expected utility of legislator j derived from \(\sigma\). To formalize these conditions, we aim to show that a strategy profile \({\hat{\sigma }}\) exists, comprising individual strategy profiles \({\hat{\sigma }}_i\), which are mutually best reply responses to each other.
The acceptance function \(P_i(x,v)\) is assumed to be twice continuously differentiable with respect to x. Moving forward, we will consider specific forms of the probability \(P_i(x,v)\). We assume that it depends on the utility function values \(U_j(x)\) as well as the continuation values \(v_j({X})\) of all legislators \(j \ne i\). Mathematically, \(P_i(x,v)\) can be expressed as:
where \({\tilde{u}}_i=(u_1,\ldots ,u_{i-1},u_{i+1},\ldots ,u_n)\), \(\tilde{v}_i=(v_1,\ldots ,v_{i-1},v_{i+1},\ldots ,v_n)\), \(u_k=U_k(x)\), and \(v_k=V_k({X})\), with \({\tilde{P}}_i:{\mathbb {R}}^{n-1} \times {\mathbb {R}}^{n-1} \rightarrow [0,1]\) being a continuously differentiable function and \(\partial {\tilde{P}}_i/\partial u_k \ge 0\) for all k.
Furthermore, we adopt the standard approach used in decision theory, legislative bargaining, or social choice theory, where \({{\mathcal {X}}}\) is interpreted as a multidimensional policy space, with each dimension corresponding to a specific policy issue. Additionally, we assume that legislators’ preferences can be represented by a concave spatial utility function defined by the following properties:
where \(E_k(x) \in {\mathbb {R}}^{m \times m}\) is a positive definite matrix, and \(z_k \in {{\mathcal {X}}}\) is the ideal point of legislator k, i.e. it holds:
Note that our definition of spatial utility generalizes the standard definition used in the literature (Carroll et al. 2013). It includes the classical linear, quadratic, or exponential transformations of the Euclidean distance between a policy \(x \in {{\mathcal {X}}}\) and legislator k’s ideal point \(z_k\), which are commonly assumed in the literature (Carroll et al. 2013). However, since we generally assume that \(U_i(x)\) is continuous, linear transformations of the Euclidean distance between \(z_i\) and x are excluded from our analysis.
Furthermore, beyond the classical forms of spatial utility functions, there exist many other forms that also fulfill the properties (11) and (12). For example, defining \(u_{ij}:=\kappa -(x_j-z_{ij})^{2} \ge 0\) as a spatial sub-utility that a legislator derives for the policy dimension j, given a sufficiently large constant \(\kappa\), implies that any concave function transforming sub-utilities into total utility satisfies (11) and (12).
A common example used to represent spatial preferences is a quadratic utility function, which we occasionally refer to in our analysis to enhance readability for the reader. Quadratic utility functions are of the form:
where \(z_k\in {{\mathcal {X}}}\) is a given point and \(E_k\in {\mathbb {R}}^{m\times m}\) is a positive definite matrix. The gradient of a quadratic utility function clearly follows the form (11) with \(E_k(x)=E_k\).
Please note that assuming a general quadratic form for the utility function can be interpreted as a second-order Taylor approximation of any concave utility function. Therefore, we consider assumptions (11), (12), and (13) as not imposing a significant restriction on our theory.
Furthermore, it is worth mentioning that assuming strict quasi-concavity of the utility functions, in addition to concavity, implies single-peaked preferences (see Shepsle (1979)).Footnote 11 However, for the purpose of proving the existence of Nash equilibria in our game, it is not necessary to assume single-peakedness or quadratic spatial utility functions.
For P in (10) combined with spatial utility functions (11), the gradient of P can be expressed in a specific form by applying the chain rule: form:
If \(\partial {\tilde{P}}_i/\partial u_k>0\) for at least one \(k\not =i\), then \(\sum _{k\in N{\setminus }{i}} \frac{\partial {\tilde{P}}_i(\tilde{u}_i,{\tilde{v}}_i)}{\partial u_k}E_k(x)\) is positive definite for all x.
To express the necessary condition of a local Nash equilibrium as a fixed point, we make the assumption that the derivative of \(P_i\) with respect to x can be represented as follows:
The specific form of the gradient of P as given in Equation (15) is derived from the assumptions stated in Eqs. 11 and 12. This implies that the change in probability with respect to changes in the proposed alternative x can be expressed as a weighted sum of the individual distances between the proposal x and the ideal points \(z_k\) of the legislators. These weights are represented by matrices \(A_k(x,v) \in {\mathbb {R}}^{m\times m}\), which may depend on the proposal \(x\in {{\mathcal {X}}}\) and the legislators’ continuation values \(v=v({X})\) in a linear or non-linear manner. It is important to note that these continuation values are influenced by the stationary strategies of the legislators, denoted by \({X}\in {{\mathcal {X}}}^n\).
In Sects. 4 and 5, we will provide a more detailed explanation illustrating how different aspects of political bargaining are captured by the elements of these matrices. These aspects include various determinants of bargaining power, such as constitutional rules of majority voting and agenda-setting power, as well as the specific configuration of policy preferences among legislators.
At this stage, we make the assumption that \(P_i(x,v)\) represents a common subjective belief held by all legislators, indicating the probability that a proposal \(x\in {{\mathcal {X}}}\) made by legislator \(i\in N\) will be accepted by the panel. However, we will relax this assumption and derive P(x, i, v) explicitly from the equilibrium acceptance strategies of the legislators in Sect. 3.7.
This assumption defines a class of games in which legislators are only required to select a policy position \(x_i\) when they are recognized, while the acceptance of a proposal is determined exogenously by a given function \(P_i(x_i,v)\). We continue to study the infinite horizon game without discounting, and the solution concept employed is once again stationary equilibrium. A pure stationary strategy for legislator \(i \in N\) consists of offering a proposal \(x_i \in X\) whenever they are recognized.
In particular, we demonstrate that the existence of local and global Nash equilibria relies on specific properties of \(P_i(x_i,v)\). Furthermore, we establish that weak dominance implies the adoption of individual logistic acceptance strategies, which lead to \(P_i(x_i,v)\) possessing certain properties that guarantee the existence of local or global Nash equilibria \({X}\) in the corresponding proposal formulation game. Therefore, overall, by considering probabilistic acceptance functions represented by logistic functions as defined in Equation (4), together with a Nash equilibrium \({X}\) in the simplified proposal formulation game, we establish a corresponding Nash equilibrium in our original legislative bargaining game.Footnote 12
To facilitate a better comprehension of the technical proofs presented in the subsequent sections, we believe it would be beneficial to provide an intuitive overview of the key steps involved in our proofs. Firstly, to establish the existence of local and global Nash equilibria in our game, we employ Brouwer’s fixed point theorem. This entails demonstrating three main components. In Sect. 3.1, we formulate the necessary conditions for a local Nash equilibrium. Subsequently, in Sect. 3.3 we define a mapping \(\varPhi : {\mathcal {X}}^n \rightarrow {\mathbb {R}}^{mn}\) based on these necessary conditions. The next step is to prove the existence of a fixed point for the mapping \(\varPhi\) and establish that this fixed point corresponds to a Nash equilibrium in our game. The existence of a fixed point is contingent on two conditions: (a) proving the continuity of \(\varPhi\), which can be straightforwardly demonstrated based on our assumed concave spatial utility functions (11 and 12 ) and the specific properties of the acceptance function \(P_i\), and (b) establishing the existence of a non-empty, closed, convex subset \(B_r(Z) \subset {\mathcal {X}}^n\) such that \(\varPhi\) maps \(B_r(Z)\) into itself. The crucial aspect of our existence proof lies in demonstrating the existence of this specified subset \(B_r(Z)\) in a finite-dimensional normed space, and we accomplish this in Sects. 3.2 and 3.4. Under these conditions, Brouwer’s fixed point theorem guarantees the existence of a fixed point for \(\varPhi\) within \(B_r(z)\), as stated in Sect. 3.3. The third step involves demonstrating that the fixed point of the mapping \(\varPhi\) establishes a local Nash equilibrium. While it is evident that a fixed point of \(\varPhi\) satisfies the necessary first-order conditions, we explicitly prove in Sect. 3.5 that the fixed point also fulfills the sufficient second-order conditions under specific conditions. In Sect. 3.6, we establish that if all \(w_i(x,X)\) are pseudo-concave in x, then a point \({X}\in {\mathcal {F}}\) satisfying the first-order conditions already constitutes a global Nash equilibrium in our game. Finally, in Sect. 3.7, we demonstrate that by endogenously deriving the acceptance function from best-reply acceptance strategies, the existence of a local and global Nash equilibrium is ensured as long as the voting response, encapsulated in the parameters \(\alpha _i\), remains sufficiently low. While the subsequent subsections present detailed technical proofs, we encourage readers to refer to sections 4 and 5 for a more comprehensive explanation of the fundamental outcomes of our theory.
3.1 First order necessary equilibrium condition under an exogenous acceptance rule
Given that the functions \(P_i\) and \(U_i\) are assumed to be continuously differentiable with respect to x, we can apply the first-order necessary condition for a local maximum at \({\hat{{X}}}\). This condition states that the derivative of \(W_i(x,{\hat{{X}}})\) with respect to the variable x must vanish at \(x={\hat{x}}_i\):
Proposition 2
A necessary condition for the existence of a local Nash equilibrium for all \(W_i\) at \({\hat{{X}}} \in {{\mathcal {X}}}^n\) and the corresponding expectation \(v=v({\hat{{X}}})\) is given by the following equation:
Proof
The first-order optimality necessary condition for \(W_i(\cdot ,\cdot )\) is expressed as follows:
\(\square\)
Certain solutions of (16) can be readily identified, namely those that satisfy the following conditions:
or those with
We refer to these solutions as degenerate because they are not practically relevant. Specifically, \(P_i({\hat{x}}_i,v)=0\) implies that the probability of proposal \({\hat{x}}_i\) being accepted by the legislative process is zero. Similarly, \(U_i({\hat{x}}_i)=v_i({\hat{{X}}})\) indicates that legislator i does not perceive any benefit in their own proposal \({\hat{x}}_i\) compared to the continuation value.
3.2 Preferable set
In this section, we introduce specific subsets of \({{\mathcal {X}}}^n\) that will be utilized later in applying a fixed point argument. Considering that legislator’s policy preferences can be represented by a spatial utility function \(U_i(x)\) (as described in (11) and (12) above), we make the additional assumption that the matrix of ideal points \({Z}=(z_1,\ldots ,z_n)\in {{\mathcal {X}}}^n\) satisfies the following propertiesFootnote 13:
Definition 3
We define the preferable set \({\mathcal {F}}\) as follows:
For any \({X}\in {\mathcal {F}}\), we have:
A vector of proposals \({X}\) is not in the preferable set \({\mathcal {F}}\), i.e., \({X}\notin {\mathcal {F}}\), if there exists at least one legislator who prefers their own proposal to fail. Furthermore, (19) implies that \({Z}\in {\mathcal {F}}\), ensuring that \({\mathcal {F}}\) is non-empty. It is reasonable to search for local Nash equilibria within the preferable set \({\mathcal {F}}\) because if \({X}\notin {\mathcal {F}}\), it means that at least one legislator, i, has a proposal \(x_i\) with a lower utility value, \(U_i(x_i)\), compared to the expected value \(v_i({X})\) of all other proposals. However, this set is not convex, making it somewhat difficult to manage fixed point arguments within \({\mathcal {F}}\). Therefore, we will now explore suitable convex subsets of \({\mathcal {F}}\).
Let \(B_r(z_i)\) be the closed ball around the ideal point \(z_i\) (w.r.t. the Euclidean norm):
The tensor ball around \({Z}\) with a common radius \(r > 0\) for each individual \(x_i\) is denoted by:
We define \(R_{{\mathcal {F}}}\) (referred to as the "radius of the preferable set") as the largest radius such that the corresponding tensor ball is still a subset of the preferable set:
Since \({{\mathcal {X}}}\) is bounded and \({Z}\in {\mathcal {F}}\), it follows that \(B_0({Z}) \subseteq {\mathcal {F}}\), and therefore, the radius \(R_{{\mathcal {F}}}\) is well-defined.
Proposition 3
The existence of an ideal point \({Z}\), i.e., the fulfillment of assumptions (19) and (20), implies that \(R_{{\mathcal {F}}} > 0\).
Proof
The assumption (20) implies that \({Z}\in {\mathcal {F}}\). Since \(U_i\) and \(v_i\) are continuous functions, it follows that \(R_{{\mathcal {F}}} > 0\). \(\square\)
All tensor balls \(B_r({Z})\) with \(0 < r \le R_{{\mathcal {F}}}\) are convex, closed, and bounded subsets of \({\mathcal {F}}\), making them possible candidates for a fixed point argument. In the case \(m = 1\), \(B_r({Z})\) is simply an n-dimensional closed cube with the center point \({Z}\).
Definition 4
The problem is called non-degenerate if the probability does not vanish inside the balls with the radius of the preferable set, i.e.:
3.3 Formulation as a fixed point equation
Proposition 4
Assuming that the problem is non-degenerate, and the gradients of \(P_k\) and \(U_k\) satisfy (15) and (11) respectively, let \({X}\in B_{R_{{\mathcal {F}}}}({Z})\) be a given vector. Then, a necessary condition for a local Nash equilibrium is given by the fixed-point equation:
where \(\varPhi = (\phi _1, \ldots , \phi _n): {{\mathcal {X}}}^n \rightarrow {\mathbb {R}}^{m \times n}\) is a vector-valued function, and its individual components are defined as follows:
with linear maps \(L_i({X}):{{\mathcal {X}}}^n\rightarrow {\mathbb {R}}^m\). Therefore, each column \({\hat{x}}_i\) of the fixed point \({\hat{{X}}}\) can be expressed as:
The technical proof is provided in the Appendix 1. However, we will introduce some notations used in the proof and in the subsequent discussion.
The linear maps \(L_i({X})\) that arise in the proof are defined as follows:
where the matrices \(\lambda _{ki}({X}),\varLambda _i({X})\in {\mathbb {R}}^{m\times m}\) are given by
A more detailed game-theoretical interpretation of the elements and components of \(L_i({X})\) will be provided in Proposition 11 and in Sect. 5 below.
3.4 Existence of a fixed point
A first simple criterion for the existence of a fixed point of \(\varPhi\) is given in the following Proposition:
Proposition 5
Under the assumptions of the previous proposition, let \(0 < r \le R_{{\mathcal {F}}}\) be given such that
Then \(\varPhi\) has a fixed point \({\hat{{X}}} \in B_r({Z})\). At this fixed point, the first-order necessary condition (16) for a local Nash equilibrium is satisfied.
Proof
The set \(B_r({Z})\) is non-empty, closed, and convex in a finite-dimensional normed space. The function \(\varPhi\) is continuous and maps \(B_r({Z})\) to itself. By the Fixed-Point Theorem of Brouwer, there exists a fixed point of \(\varPhi\) in \(B_r({Z})\). At this fixed point \({\hat{{X}}}\), the first-order necessary condition (16) for a local Nash equilibrium is fulfilled. \(\square\)
At first glance, achieving the mapping property (23) may seem easy. However, in general, this is not the case due to the following reason: When the radius \(r > 0\) is too small or too large, the set \(B_r({Z})\) becomes small or large, respectively, such that the image of \(B_r({Z})\) under the mapping \(\varPhi\) may no longer fit inside \(B_r({Z})\). To address the question of whether such an \(r > 0\) exists, we will now examine the structure of the voting model more closely. In particular, we will derive a criterion for a radius \(r > 0\) that satisfies (23). Here, we use the notation \(\Vert \cdot \Vert _\infty\) to represent the row-sum norm of matrices.
Proposition 6
Under the assumptions of Proposition 4, we further assume the existence of a radius \(r \in (0, R_{{\mathcal {F}}}]\) such that
where
and \(\lambda _i(r) > 0\) is a lower bound on the eigenvalues of the matrix \(E_i(x)\) for \(x \in B_r(z_i)\). Then the mapping property (23) holds.
The proof is provided in Appendix 2. An interpretation of condition (24) is that the legislators’ ideal points \(z_1, \ldots , z_n\) are sufficiently close to each other, as this leads to small values of \(D_i\), and consequently, (24) is more likely to be satisfied for certain values of r. Condition (24) is still not directly usable for the explicit determination of a suitable radius r because the radius appears on both sides of the inequality. However, the relation (24) becomes valid if \(l_i(r)\) does not increase too rapidly with increasing r. To utilize the criterion (24), we need to consider specific examples of probabilities P. We address this topic in Proposition 8 in Sect. 3.6 below.
3.5 Second order sufficient condition
Proposition 7
Let \({X}= (x_1, \ldots , x_n) \in {\mathcal {F}}\) be a matrix satisfying the first-order optimality condition (16). Assume that \(P_i\) and all \(U_i\) are twice continuously differentiable with respect to x, and that all \(U_i(x_i)\) are strictly concave, i.e., \(\nabla ^2 U_i(x_i)\) is negative definite. Furthermore, assume that \(P_i(x_i, v) > 0\) and \(\partial _{xx}^2 P_i(x_i, v)\) is negative semi-definite for all \(i \in N\) and \(v = v(X)\). Then \({X}\) is a local Nash maximum.
The proof is based on analyzing the individual terms of the Hessian of \(W_i\) and demonstrating that the Hessian is negative definite. Further details are provided in Appendix 3.
3.6 Global Nash equilibrium
Let \({X}= (x_1, \ldots , x_n) \in {\mathcal {F}}\) be a local Nash equilibrium, satisfying the condition for each \(i \in N\):
By definition, it follows that \({X}\) is a global Nash equilibrium. Therefore, the existence of a global Nash equilibrium depends on the properties of the function \(W_i\). A sufficient condition for a global Nash equilibrium would be if all \(W_i\) were twice continuously differentiable and concave with respect to x. In other words, this assumption implies that any point \({X}\in {{\mathcal {X}}}^n\) satisfying the first-order optimality condition (16) is a global Nash equilibrium.
However, concavity is generally too restrictive and is often not satisfied by relevant \(W_i\) in our legislative bargaining game. Fortunately, concavity is only a sufficient condition, not a necessary one, for guaranteeing a global maximum. An alternative criterion is the vanishing gradient of a pseudo-convex (or pseudo-concave) function, as shown by Mangasarian (1965). Pseudo-concave functions possess the same maximum properties as concave functions, as demonstrated by Avriel et al. (2010). Specifically, (i) a local maximizer for a pseudo-concave function is also a global maximizer, and (ii) the usual first-order necessary condition for maximizing a differentiable pseudo-concave function over an open convex set in \({\mathbb {R}}^m\) is also sufficient for a global maximum.
We can now establish specific properties of \(P_i\) that guarantee any local Nash equilibrium to be a global one.
Proposition 8
Assume that all \(P_i(\cdot ,v)\) and \(U_i\) are twice continuously differentiable functions, and consider the functions \(W_i\) defined in (9). If these functions are pseudo-concave in \(x_i\), i.e.,
then any point \({X}\in {\mathcal {F}}\) satisfying the first-order optimality condition (16) is also a global Nash equilibrium.
Proof
The proof follows directly from the result in Mangasarian (1965), which states that for pseudo-concave functions, any local maximum is also a global maximum. \(\square\)
In the next subsection, we will demonstrate that this pseudo-concavity property indeed holds for our bargaining game if the voting response is sufficiently low.
3.7 Local and global Nash equilibria with endogenous acceptance rules
To analyze our complete game, we need to derive Nash equilibria for complete strategy profiles. As mentioned earlier, under our specific assumptions on stochastic utility and weak dominance of individual acceptance rules, legislators apply probabilistic acceptance rules \(\pi _i\). Additionally, assuming certain properties for the distribution of stochastic utilities, we find that (a) individual probabilistic acceptance rules can be represented by a logistic function as defined in (2), and (b) the acceptance probabilities \(P_i\) are defined as in (4).
In equilibrium, legislators formulate proposals that maximize their expected utilities, taking into account the probabilistic acceptance rules and their continuation values. Consequently, a proposer selects a policy position for their proposal that maximizes their expected utility, as defined in Proposition 1. In this proposition, default utilities are simply equal to the legislator’s continuation values, and the probability function P is derived from individual probabilistic acceptance rules.
For a low voting response, where individual acceptance probabilities \(\pi _i\) have the form (7) with a small parameter \(\alpha _i \ge 0\), we obtain an existence result for a local and global Nash equilibrium.
Proposition 9
For probabilities of the form (4) that are two times continuously differentiable w.r.t. x, and \(\pi _i\) of the form (7) with sufficiently small parameters \(\alpha _i > 0\), as well as utilities of the form (13), the following results hold:
-
(i)
There exists a point \({\hat{{X}}} \in {\mathcal {F}}\) that satisfies the necessary and sufficient conditions for a local Nash equilibrium in our proposal game.
-
(ii)
This \({\hat{{X}}}\) is both a local and global Nash equilibrium in our legislative bargaining game.
The proof involves demonstrating that the functions \(w_i\), as defined in Proposition 8, exhibit pseudo-concavity. The technical details of the proof can be found in Appendix 4 (part i) and Appendix 7 (part ii).
3.8 Numerical computation of Nash equilibria
The existence result in Proposition 5 and the second-order sufficient condition in Proposition 7 have immediate benefits. However, there is another aspect related to computation that might not be immediately apparent. The proofs provide us with insights into a possible numerical scheme for computing local and global Nash equilibria.
One potential iterative procedure that can be employed is as follows: We start with an initial point \({X}^{(0)}:={Z}\), and then perform the iteration
for \(k\in {\mathbb {N}}\). The iteration continues until the condition \(\Vert {X}^{(k+1)}-{X}^{(k)}\Vert \le \epsilon\) is met, where \(\epsilon >0\) is a small tolerance. This fixed-point iteration can be viewed as a steepest descent algorithm applied to the n functionals \(-W_1(x_1,{X}),\ldots ,\) \(-W_n(x_n,{X})\).
Although Proposition 6 does not provide an explicit method for determining the radius r, from an algorithmic perspective, this is not crucial. We can initiate the fixed-point iteration with the initial value \({X}^{(0)}:={Z}\), which is evidently inside \(B_r({Z})\) for any arbitrary \(r>0\). Subsequent iterates \({X}^{(1)}, {X}^{(2)}, \ldots\) will always remain within \(B_r({Z})\) for a suitable choice of r. In other words, we do not require the exact value of r as long as we know that there exists an r such that (23) holds. The fixed-point iteration will never exit the convex set \(B_r({Z})\).
Moreover, convergence acceleration is possible by employing a modified iteration with a step length \(\theta >0\), such as:
A judicious choice for \(\theta\) can be determined using the Armijo line search concept, as described in Wolfe (1969).
Furthermore, it is important to acknowledge that while Proposition 5 guarantees the existence of a fixed point, it does not establish its uniqueness. Without uniqueness, the proposed iterative procedure may be sensitive to the initial point chosen. Additionally, implementing the iterative procedure requires repeated numerical computations of the mapping \(\varPhi\), which involves calculating elements of the matrices \(L_i({X})\) based on winning coalitions. Consequently, the computational effort increases monotonically with the number of winning coalitions. As the number of actors grows, the number of winning coalitions increases exponentially. For instance, in the co-decision procedure of the EU-28, there are approximately 7.7 billion winning coalitions. A straightforward implementation would result in prohibitively high computational costs, even for a single evaluation of the mapping \(\varPhi\). However, a computational algorithm capable of significantly reducing the required effort, enabling the calculation of the mapping for the EU-28 co-decision procedure, can be found in Christiansen et al. (2016). Surprisingly, based on simulation analyses, computed Nash equilibria have exhibited remarkable stability with respect to changes in initial starting points, as long as those points are located within a sufficiently close neighborhood of the legislators’ ideal points.
A thorough and rigorous analysis of our proposed computational procedure, including convergence proofs, a systematic examination of sensitivity to initial points, and other aspects, constitutes an intriguing research direction. However, it exceeds the scope of this paper, and we defer it to future investigations.
4 Characterization of equilibrium outcomes
For any specification of the acceptance probability function \(P_i\), the equilibrium outcome of our legislative bargaining model is a lottery over legislators’ proposals x and the status quo \(x_0\), where the probabilities \(Q_i(x)\) represent the likelihood that the outcome will be the proposal of legislator \(i \in N\), and \(Q_0 = 1-\sum _{i \in N} Q_i\) represents the probability that the status quo \(x_0\) will be the outcome of the legislative bargaining.
Based on (22), the individual Nash equilibria \({\hat{x}}_i\in X^n\) can be expressed as a linear map of the preferential points \({Z}\):
where \(D_{k,i}({X})\in {\mathbb {R}}^{m\times m}\) are positive semi-definite matrices. Now, let us examine the specific case in which the utility functions \(U_i\) and the probability \(P_i\) have a particular form.
4.1 A mean Voter theorem
Assuming the legislature operates under majority rule, where individual legislators vote probabilistically with the probability that legislator j approves the proposal of legislator \(i \ne j\) given by \(\pi _{ij}=\pi _j\) as defined in Equation (7), we can establish the following proposition:
Proposition 10
If the utility functions \(U_k\) satisfy Equation (11), then the gradient of the probability \(P_i(x,v)\) defined in Equation (4) satisfies Equation (15).
The proof of this proposition is provided in Appendix 5. Now, let’s introduce the following definition:
Definition 5
We define separable spatial preferences as a case where the spatial utility functions have the form (13) and all \(E_k(x)\in {\mathbb {R}}^{m\times m}\) are positive definite diagonal matrices.
Next, we present a proposition using the notation u : v for the component-wise multiplication of two vectors \(u,v\in {\mathbb {R}}^m\), defined as \((u\odot v)_i:=u_i v_i\), and \(1\!\!1\) denotes the vector \(1\!\!1:=(1,\ldots ,1)^T\in {\mathbb {R}}^m\).
Proposition 11
Let \({\hat{X}}\in {{\mathcal {X}}}^n\) be a (local or global) stationary Nash equilibrium, assuming separable spatial preferences, and the derivative of \(P_i\) with respect to x of the form (15) with \(A_k(x,v)=a_k(x,v)E_k(x)\), where \(a_k(x,v)\) are scalar coefficients. Then, the presentation (25) represents a linear map of legislators’ ideal points:
where \(d_{k,i}({\hat{{X}}})\in {\mathbb {R}}^m\) is a non-negative vector with \(\sum _{k\in N}d_{k,i}({\hat{{X}}})=1\!\!1\), and \(\omega _{k,i}({\hat{{X}}})\ge 0\) are non-negative scalar values with \(\sum _{k\in N}\omega _{k,i}({\hat{{X}}})=1\) for all \(i\in N\).
Proof
The matrices \(\lambda _{k,i}({\hat{{X}}})\) and \(\varLambda _i({\hat{{X}}})\) are multiples of the diagonal matrix \(E_k({\hat{x}}_k)\). Therefore, the matrix \(diag(d_{k,i,1}({X}),\ldots ,d_{k,i,m}({\hat{{X}}})):=\varLambda _i({\hat{{X}}})^{-1}\lambda _{k,i}({\hat{{X}}})\) is also diagonal. This implies that the j-th component of \({\hat{x}}_i\) can be expressed as
The right-hand side of (26) is a concise notation for this expression. Furthermore, it can be easily verified that \(\lambda _{k,i}({\hat{{X}}})\in {\mathbb {R}}^{m\times m}\) is a product of a scalar value and the matrix \(E_k({\hat{x}}_k)\), given by
which defines the scalar weight \(\omega _{k,i}({\hat{{X}}})\). \(\square\)
Thus, the equilibrium proposal of each legislator corresponds, for each policy dimension, to a weighted mean of legislators’ dimension-specific ideal positions, where the dimension-specific weights are given by the elements of the vector \(d_{k,i}({\hat{{X}}})\).
For a better interpretation of the weights \(\omega _{k,i}({X})\) in the case of probabilistic acceptance under majority rule, i.e., probabilities of the form (4), the following relationship holds:
where \({{\tilde{\omega }}}_{k,i}({X}) \in {\mathbb {R}}\) is defined as (with \(v=v({X})\)):
As shown in Appendix 5, it holds:
where \(D^*_k \subset {\mathcal {D}}\) denotes the subset of winning coalitions in which legislator k is a decisive member. Therefore, \(a_k(x,v)\) represents the probability that legislator k is decisive in approving the proposal x.
To gain further insight into the relative weight of legislator i’s ideal point, \(\omega _{ii}\), in determining their own proposal compared to the rest of the legislature \(k \ne i\), we define the marginal voting response of the legislature as follows:
Thus, we have (with \(v=v({\hat{{X}}})\)):
Accordingly, the lower the marginal voting response of the legislature in relation to the absolute voting response \(P_i(x_i,v)\) and the lower the gain a legislator realizes from their own proposal compared to their continuation value \(U_i({\hat{x}}_i)-v_i({\hat{{X}}})\), the higher their control over their own proposal, \(\omega _{ii}\).
On the other hand, if \(\omega _{ii} < 1\), proposals are partially influenced by the legislature, and the extent of control that an individual legislator \(k \ne i\) has over the proposals of another legislator depends on their relative marginal voting response, \(\alpha _k \pi _k(U_k(x),v) (1-\pi _k(U_k(x),v)\), and the probability that legislator k is decisive in approving legislator i’s proposal, denoted as \(a_k\). It is important to note that the value of \(a_k\) is particularly influenced by the voting rule \({\mathcal {D}}\). For example, when legislator k is decisive in a larger number of winning coalitions, their value of \(a_k\) will be higher. Additionally, swing voters who have a probability of 0.5 of voting in favor or against a proposal maximize the marginal voting response. Furthermore, the marginal voting response of legislator k is influenced by the scaling parameter \(\alpha _k\).
Overall, we consider the expectation value:
as a comprehensive measure of decision power derived from our legislative bargaining game as it corresponds to the expected weight of the ideal point of a legislator k determining the expected decision outcome of the legislative bargaining. This power index extends classical voting power indices by incorporating three distinct aspects of bargaining power. Firstly, the index accounts for the relative number of winning coalitions in which a legislator holds decisive power. This aspect of decision-making power is the primary driver behind classical voting power indices such as the Banzhaf-Coleman or Shapely-Shubik voting power indices. Secondly, our power index incorporates the specific composition of legislators’ policy preferences, emphasizing the importance of this aspect in decision-making power. This aligns with the strategic voting power index proposed by Napel (2006). Thirdly, our decision power index captures the relative influence of agenda-setting power, as reflected by the recognition probabilities \(q_i\). The significance of agenda-setting power in legislative bargaining has been highlighted by Snyder et al. (2005) and Kalandrakis (2006). While conducting a detailed theoretical analysis of our generalized decision power index may be intricate, one advantage of our model is the numerical computability of Nash equilibria in the game. Thus, in Sect. 5 below, we demonstrate how different aspects of our game impact power and other relevant equilibrium outcomes.
4.2 Pareto-optimality of bargaining outcomes
Let’s consider the Bergson-Samuelson social welfare function \(S_i\) defined as follows:
where the specific weight \(\omega _{k,i}:= \omega _{k,i}({\hat{{X}}})\) is given by (29), and \({\hat{{X}}}\) represents the Nash equilibrium. We can establish the following correspondence directly (proof see Appendix 6):
Proposition 12
Under the assumptions of Proposition 11 and an additional assumption of quadratic preferences (13), the equilibrium proposal \({\hat{x}}_i\) of legislator i maximizes the social welfare function \(S_i\) given by (32):
According to classical Welfare Economics, Proposition 12 implies that all proposals formulated by legislators in equilibrium are Pareto-optimal. However, it’s important to note that the overall outcome of the legislative bargaining game, represented by the lottery over legislators’ proposals, is generally not Pareto-optimalFootnote 14.
4.3 Uniform spatial preferences
Definition 6
We define uniform spatial preferences as the case where bargaining involves separable spatial preferences with the same non-singular matrix \(E=E_k(x)\) for all \(k\in N\), independent of x.
Theorem 1
(Mean voter theorem) Under the assumption of uniform spatial preferences and probabilities of the form (10), the presentation (25) represents a convex combination of legislators’ ideal points:
where the coefficients \(\omega _{k,i}({\hat{{X}}})\ge 0\) are non-negative and \(\sum _{k\in N}\omega _{k,i}({\hat{{X}}})=1\) for all \(i\in N\).
Proof
Under these additional assumptions, the derivative \(\frac{\partial }{\partial x} P_i(x,v)\) takes the form (15) with positive semi-definite diagonal matrices given by \(A_k(x) = \frac{\partial }{\partial u_k}{\tilde{P}}_i(\tilde{u}_i,{\tilde{v}})E\). The expression (33) follows directly from the special form of \(L_i({X})\) (see the proof of Proposition 4 in the appendix), as the matrices \(\lambda _{k,i}(x)\) and \(\varLambda _i({X})\) become multiples of the matrix E. Therefore, \(\varLambda _i({X})^{-1}\lambda _{k,i}(x)\) is a multiple of the identity matrix I. \(\square\)
Thus, in the case of uniform spatial preferences, the equilibrium proposal of each legislator (33) corresponds to a weighted mean of legislators’ specific ideal positions \(z_k\). Notably, these weights are independent of the particular policy dimension \(j\in \{1,\ldots ,m\}\), i.e., the j-component of \(x_i\).
4.4 High voting response in a one-dimensional policy space
Analyzing the case of high voting response presents a more nuanced challenge within our theory, as the existence of equilibrium depends on certain restrictions on the parameter \(\alpha\), which must be sufficiently small. To understand how equilibrium outcomes are influenced by the voting power of the legislature, disregarding the agenda setter power of the proposer, we focus on a specific scenario. We narrow our analysis to the case of a one-dimensional policy space (\(m=1\)), where \(X \subset {\mathbb {R}}\). Additionally, we assume equal recognition probabilities, \(q_i = n^{-1}\), for all legislators \(i \in N\), and consider a legislature operating under majority rule.
When we increase the voting response parameter \(\alpha _i\rightarrow \infty\) in the individual acceptance probability functions (7), we formally obtain the classical game of Baron and Ferejohn. As a conjecture, we propose that the equilibria of the game presented in this paper converge to the pure strategy equilibria established by Banks and Duggan (2000). Notably, Cho and Duggan (2003) and Cho and Duggan (2009) provide insightful results regarding the relationship between equilibrium outcomes in the original game of Banks and Duggan (2000) and the median voter theorem proposed by Duncan Black. However, for our specific game, the question of the existence of equilibria for large values of \(\alpha _i\) remains open. We believe that investigating the aforementioned conjecture in future work would be valuable and provide further insights.
5 Example
To gain insights into the nature of equilibrium in our legislative bargaining game, we present a simple example with three legislators (\(n=3\)) and two policy dimensions (\(m=2\)), denoted as \(\{A, B\}\). This example allows for a more intuitive understanding of the matrices \(L_i(x)\) and the corresponding equilibrium outcomes.
Furthermore, we conduct a direct comparison between the equilibrium outcomes of the game proposed in this paper (referred to as BHZG) and the mixed strategy equilibrium outcomes of a corresponding legislative bargaining game by Banks and Duggan (2000) (referred to as BDG).
In this example, we assume uniform and separable quadratic policy preferences (13), with identity matrices \(E_k=I\in {\mathbb {R}}^{n\times n}\). The ideal points are set as \(z_1 = (0,1)\), \(z_2 = (1,0)\), and \(z_3= (\lambda ,\lambda )\), where \(\lambda \ge 0.5\). The recognition probabilities are \(q_1=q_2=0.5 (1-q_3)\), and \(q_3 \in [0,1]\). The legislature operates under simple majority voting, represented by the voting rule \({\mathcal {D}}:= \{ \{1,2,3\}, \{1,2\},\{1,3\},\{2,3\} \}\).
Given these assumptions, we can numerically compute the mixed stationary Nash equilibrium of the BDG using the methods described by Baron (1991). To ensure comparability between the two games, we assume that the game continues after the legislature rejects a proposal with a probability of one. Consequently, the probability of the status quo being the outcome in the BHZG is zero. To compute equilibrium outcomes, we specify the logistic acceptance functions for legislators using the form (7) with all \(\alpha _j =2\).
For both games, we calculate equilibrium outcomes for 400 different parameter scenarios, defined by 20 equidistant values of \(q_3\) ranging from 0 to 0.9 and 20 values of \(\lambda\) ranging from 0.5 to 1.37. The fixed-point iteration method presented in this paper typically converges to the equilibrium in 6–8 iterations, depending on the specific parameter setting.
Based on the simulation results, we analyze the extent to which the two games yield substantially different predictions or if the equilibrium outcomes are in correspondence with each other. Our analysis focuses on comparing the comparative statics results, examining how changes in exogenous parameters lead to shifts in the equilibrium outcomes of both games in the same direction.
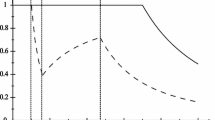
Figure 1 illustrates the equilibrium proposals for both games, showcasing specific values of \(q_3\) and \(\lambda\).

Obtained equilibrium proposals for the game BDG (dots) and the game BHZG (triangles). The label \(i\rightarrow j\) denotes the BDG equilibrium of legislator i in coalition with legislator j
5.1 Observation 1: differences in legislative equilibrium outcomes
As shown in Fig. 1, there is a notable difference between the equilibrium proposals of BDG and BHZG. In BDG, the equilibrium proposals tend to lie on the edges of the triangle \(\varDelta\), which represents the space defined by the ideal points \(z_1\), \(z_2\), and \(z_3\). On the other hand, in BHZG, the equilibrium proposals generally lie within the interior of the triangle \(\varDelta\). This distinction reflects the distinct logic of the two games.
In BDG, the equilibrium proposals arise from the maximization of the proposer’s utility over an acceptance set. This acceptance set is formed by the union of acceptance sets of all winning coalitions, as defined by the constitutional decision rule governing the legislature. An acceptance set for a winning coalition represents the intersection of individual acceptance sets of its members. The individual acceptance set of a legislator comprises the set of policies for which their utility is greater than or equal to their continuation value. Technically, in BDG, each proposer formulates a proposal that maximizes their utility over the acceptance set of a specific winning coalition. In equilibrium, the proposer suggests the proposal that yields the highest utility. If there are multiple proposals with the same maximum utility, the proposer mixes across those proposals. In the simple example, there are two minimum winning coalitions for each proposer, each consisting of one of the other legislators.
Let \(x^{bd}_{ij}\) denote the proposal that legislator i formulates to secure the acceptance of legislator j, and let \(r^{bd}_{ij}\) denote the probability of legislator i formulating proposal \(x^{bd}_{ij}\) when recognized. The equilibrium probability that proposal \(x^{bd}_{ij}\) becomes the final outcome in BDG is given by \(q_i r^{bd}_{ij}\). Thus, the mixed strategy equilibrium outcome of BDG corresponds to a lottery over six proposals, in contrast to the three proposals found in the pure strategy equilibrium of BHZG.
In BDG, with quadratic utility functions, each equilibrium proposal lies on the linear contract curve between the proposer’s ideal point and their coalition partner j. Mathematically, we have \(x^{bd}_{ij} = \omega ^{bd}_{ji} z_i + (1-\omega ^{bd}_{ji}) z_j\), where \(0 \le \omega ^{bd}_{ji} \le 1\) represents the relative weight of proposer i’s ideal point compared to the ideal point of legislator j.
In the simple example, the individual acceptance set determines a cut point on the linear contract curve between proposer i and their coalition partner j. This cut point corresponds to the equilibrium proposal, where \(\omega ^{bd}_{ji} = \sqrt{|v^{bd}_j|}/|z_i-z_j|_2\). Here, \(v^{bd}_j\) represents the continuation value of player j in BDG.Footnote 15
In the case of BHZG, equilibrium proposals of legislators are determined through expected utility maximization, specifically \(P_i(x_i,v) (U_i(x_i)-v_i({X}))\). Given quadratic utility functions, this maximization leads to equilibrium proposals that can also be interpreted as weighted means of legislators’ ideal points. However, as shown above in Sect. 4 in BHZG, the relative weight assigned to a proposer i depends on two factors: the marginal responsiveness of the total legislature and the utility gain realized by the proposer compared to her continuation value, i.e., \(U_i(x_i)-v_i({X})\). The relative weight of a legislator j with respect to proposer i is determined by their individual marginal responsiveness. This responsiveness is influenced by the marginal change in the total acceptance probability resulting from a marginal change in legislator j’s utility. It can be expressed as the product of two components: the probability \(a_j(x_i,v)\) that legislator j is decisive for the acceptance of proposal \(x_i\) (as shown in equation (29)), and the expected utility \(v=v({X})\), multiplied by the marginal change in legislator j’s individual acceptance probability caused by a marginal change in their utility, i.e., \(\pi _j(U_j(x_i),v_j) (1-\pi _j(U_j(x_i),v_j))\).
The relative weights of legislators \(j \ne i\) with respect to proposer i depend on their continuation values. The weights are maximal at the cut point, where the legislator’s utility derived from the proposal is equal to her continuation value, i.e., if \(U_j(x_i)=v_j({X})\), the individual acceptance probability becomes 0.5 and the marginal response becomes maximal. In contrast to BDG, positive weights are observed for legislators even below and above the cut point, i.e., for \(U_j(x_i)\ne v_j({X})\).
Interestingly, in our simple example, if we define \((1-\omega _{i,i})^{-1}\sum \limits _{j \ne i} \omega _{i,j} z_j\) as the center ideal point of the legislature without the proposer, equilibrium proposals always lie on the line between the center ideal point of the legislature and the ideal point of the proposer, \(z_i\). The center ideal point lies on the linear contract curve between the ideal point of legislator \(j \ne i\) and legislator \(k \ne j,i\). The exact location of the center ideal point depends on the relative weights of the two non-proposers. In our simple example, given the symmetry of legislators 1 and 2, the center ideal point regarding the proposal of legislator 3 is the midpoint between \(z_1\) and \(z_2\). Furthermore, in BHZG, the relative own weights, \(\omega _{i,i}\), are increasing in the continuation value of the proposer and decreasing in the continuation value of other legislators. The relative own weight also depends on the parameter \(\alpha\), where higher \(\alpha\)-values lead to decreased own weights.
Specifically, in our simple example, all own weights in the BHZG equilibrium are higher than 0.5 for \(\alpha =2\). Similarly, in BDG, all own weights are higher than 0.5 as long as we assume \(0.5 \le \gamma \le 1\), except for proposals of legislators 1 and 2 vis-à-vis legislator 3, where own weights are only larger than 0.5 if \(\gamma \ge 0.75\)Footnote 16. Moreover, our analysis in Sect. 4.1 reveals that equilibrium proposals in both games tend to be relatively close to the ideal points of the legislators, at least within the simulated parameter scenarios of our simple example. Interestingly, we find that in BHZG, equilibrium proposals result as weighted means of legislators’ ideal points, where \(\omega _{ij}\) represents the weight of legislator j’s ideal point in determining the proposal of legislator i, i.e., \(x_i = \sum _{j} \omega _{ij} z_j\). This finding aligns with the result presented by Baron and Ferejohn (1991), who demonstrated that equilibrium proposals in BDG, for the specific example considered here, also follow the form of weighted means: \(x^{bd}_{ij} = \omega ^{bd}_{ij,i} z_i + (1-\omega ^{bd}_{ij,i}) z_j\), where \(0 \le \omega ^{bd}_{ij,i} \le 1\). Accordingly, by defining \(\omega ^{bd}_{ji,k} = 0\) for \(k \ne i, j\), we can calculate the decision power of legislators in BDG in a similar manner to BHZG as follows: \({\mathbb {E}}(\omega ^{bd}_{k}) = \sum _{i,j \in N} q_i r^{bd}_{ij} \omega ^{bd}_{ij,k}\) (see Equation (31) above).
5.2 Observation 2: similarities of legislative equilibrium outcomes for high voting response
While the logic of BHZG differs from the original BDG, and therefore legislative outcomes predicted by both models may substantially differ, our findings indicate that, at least for our simple example, the two models yield rather similar equilibrium outcomes. This can be observed in Figs. 5 to 6, which present the expected decision and power for both games across all 400 scenarios. It is worth noting that the expected decision is symmetric, resulting in the same value for both dimensions. Thus, the figures only depict the values for dimension A. Figures 2a to 2b provide normalized prediction errors derived from using the simulated lottery of BHZG equilibrium proposals to predict the corresponding simulated lottery of BDG proposals. The latter corresponds to the ex-post decision outcomes of BDG. To calculate the prediction error for ex-post decision outcomes, we employ the formula \(\sum _i Q_i \sum _{i,j} Q^{bd}_{ij} \Vert x_i-x^{bd}_{ij}\Vert / \Vert x^{bd}_{ij}\Vert\). For ex-ante prediction errors, we use the expected proposal of BHZG to predict the expected proposal of BDG. Normalization is performed by subtracting the prediction error resulting from using the simulated lottery of BDG proposals to forecast ex-post decisions derived from BDG. The reported normalized prediction errors represent the difference in percentage prediction errors based on BHZG and BDG, respectively.
To facilitate interpretation, Figs. 2a to 2b display average prediction errors calculated for each \(\lambda\) and \(q_3\) parameter scenario, respectively, across all 20 \(q_3\) or \(\lambda\) parameter values. As depicted in Figs. 2a to 2b, extreme differences in ex-post equilibrium outcomes between the two games arise in the case of a centrally located legislator. In this scenario, where the ideal point of legislator 3 is located at (0.5, 0.5) as the midpoint between the ideal points of the other two legislators, BDG predicts that legislator 3 possesses total power, resulting in all equilibrium proposals corresponding to the median voter position. In contrast, BHZG predicts equilibrium proposals that can deviate significantly from the median position as long as legislators’ voting responses are sufficiently low and the recognition probability of the centrally located legislator is not extremely high. The maximum prediction error observed for this case is nearly 36%.
However, as discussed in Sect. 4, assuming a relatively low voting response is a crucial assumption for these differences. As legislator 3 becomes less centrally located, prediction errors decrease to values below 10%, and if legislator 3 becomes a preference outlier, average prediction errors drop below 5%. Similarly, prediction errors decrease with a higher recognition probability \(q_3\), with average prediction errors above 10% only occurring for lower values of \(q_3\) below 0.3 (see Fig. 2b).
Interestingly, when considering low values of \(q_3\), prediction errors for ex-ante outcomes are quite similar to those for ex-post outcomes. However, the former decrease much more rapidly for higher recognition probabilities, reaching values below 5% for \(q_3\)-values greater than 1/3. In general, as proposals approach the ideal points of their respective proposers in both games, and as acceptance probabilities across proposals in BHZG and randomization probabilities in BDG approach 0.5, the lotteries of both games tend to correspond to the same expected power structures and decision outcomes. The closer these conditions are met, the greater the alignment between the two models.
5.3 Observation 3: equilibrium outcomes in dependence of parameter settings
Another important aspect when comparing both games is the examination of comparative static effects, which refer to how central equilibrium outcomes change when exogenous parameters are altered. This includes the comparative static effects of constitutional set-up, such as decision rules that determine winning coalitions or recognition probabilities, as well as systematic changes in policy preference constellations. An intriguing question is whether the comparative static effects of both models are qualitatively similar, meaning that changes in the constitutional set-up induce shifts in central equilibrium outcomes in the same direction. To gain initial insights into these questions, we compared changes in equilibrium outcomes of both games across simulated parameter scenarios. The main results are summarized in the appendix, specifically in figures 3a - 3b and 4a - 4b. From these figures, it is evident that both games exhibit systematic changes in expected decision outcomes and power structures in response to variations in exogenous parameters. Notably, the patterns observed in both games are quite similar. For instance, the power of legislator 3 increases in both games as she becomes more centrally located and as her recognition probability rises (see figure 4a). However, there is an interesting distinction: while BHZG exhibits changes in power structures for different recognition probabilities, BDG predicts invariant power structures below the threshold \(q_3^*\) (Baron 1991), with similar increases in the decision power of legislator 3 observed only for values above \(q_3^*\) (see figure 4b). These altered power structures are partially reflected in the expected outcomes as well (see figures 3a - 3b), where both policy dimensions experience higher expected decisions as legislator 3’s recognition probability increases. Interestingly, an increase in recognition probability has a greater impact on power structures in BHZG. For example, the average power of legislator 3 increases from 0.14 to 0.84 when the recognition probability rises from 0 to 0.9. In contrast, BDG shows a smaller increase in legislator 3’s power, from 0.56 to 0.88. Conversely, when becoming more centrally located, legislator 3’s average power increases from 0.44 to 1 in BDG, whereas the same shift in ideal points only leads to a power shift from 0.44 to 0.54 in BHZG.
5.4 Observation 4: incentives to agree on cooperative bargaining
Although equilibrium proposals in both games are generally Pareto-optimal, both games exhibit inefficiency from the legislators’ perspective due to uncertainty. As discussed in Sect. 4, assuming concave utility functions implies that all legislators would prefer a direct implementation of the mean voter position over the lottery of proposals. This can be expressed as follows: \(U_i(\sum \limits _j Q_j x_j) \ge v_i\) and \(U_i(\sum \limits _{j,k} q_j r^{bd}_{jk} x^{bd}_{jk}) \ge v^{bd}_i\). This inefficiency creates incentives for legislators to seek cooperative bargaining mechanisms. Interestingly, informal cooperative legislative bargaining mechanisms are not only discussed in parliamentary systems like Switzerland but also in the US system. Scholars such as Weingast (1994) emphasize universalism as an informal cooperative legislative bargaining procedure employed in distributive politics (see also Weingast 1979; Weingast et al. 1981; Fiorina 1981). Universalism is also discussed as a characteristic informal cooperative legislative bargaining procedure in the EU system, for instance in the context of the European Common Agricultural or Fishery Policy (Franchino and Rahming 2003).
It is worth noting that non-cooperative bargaining models still play a crucial role in explaining cooperative legislative bargaining since cooperative procedures are derived based on anticipated equilibrium outcomes of non-cooperative legislative bargaining. Interestingly, to predict similar induced cooperative legislative bargaining outcomes, it is sufficient for both BHZG and BDG to yield similar ex ante expected equilibrium outcomes.
6 Summary and outlook
This paper addresses the limitations of current non-cooperative legislative bargaining models in providing a comprehensive analysis of public policy in real-world political systems. We present a novel non-cooperative legislative bargaining model, which establishes the existence of pure strategy Nash equilibria under broad assumptions, including a multidimensional policy space and a large number of legislators. In contrast to existing models, our approach derives legislators’ behavior from stochastic utility maximization, introducing probabilistic acceptance of proposals. We demonstrate the existence of a stationary pure local and global Nash equilibrium, where the equilibrium outcome corresponds to a lottery of legislators’ proposals. Notably, we prove a "Mean Voter Theorem" as a significant implication of our theory showing that proposals emerge as weighted means of legislators’ ideal points dimension by dimension.
As special cases, we apply our theory to voting games based on voting rules, and we establish the existence of stationary subgame perfect local and global Nash equilibria, respectively, assuming a sufficiently low voting response of legislators.
Through simulation analyses of a simple example, we compare our model (BHZG) with the original legislative bargaining model proposed by Banks and Duggan (2000) (BDG). Our findings reveal a structural equivalence in equilibrium outcomes and demonstrate a correspondence of comparative static effects regarding the central constitutional set-up variables in both games. However, it is important to note that BHZG incorporates distinct behavioral assumptions at the micro level, which may lead to substantial differences in equilibrium outcomes at the macro level compared to the original BDG. Consequently, an intriguing avenue for future research would be to empirically analyze the predictive performance of BHZG compared to BDG in real-world political systems, examining under which circumstances BHZG delivers more accurate predictions.
Moreover, our model holds the potential for further valuable contributions to the field of legislative bargaining theory. Firstly, addressing the persisting challenge of numerically computing equilibria in real-world political systems, BHZG serves as a promising foundation for developing an empirically applicable bargaining theory of collective choice. The formulation of Local and Global Nash equilibria as fixed points, computable under broad assumptions including multidimensional policy space and a large number of legislators (such as in the EU-system), is an advantageous feature of our model. Future research can delve into fascinating topics of numerical computation, particularly exploring the role of voting response in determining bargaining outcomes.
Secondly, many empirical studies indicate that legislative bargaining behavior in real-world political systems is influenced by specific interaction effects among legislators beyond spatial policy preferences. Examples include party discipline and party affiliation in European parliamentary systems, as well as ex ante coalitions among member states in the EU-system based on non-policy factors. Our theory explicitly allows for the incorporation of various interaction effects as non-policy determinants of legislators’ probabilistic acceptance rules, enabling a comprehensive analysis of their impact on legislative bargaining outcomes.
Thirdly, the development and empirical application of cooperative legislative bargaining theory is an important and intriguing research area. Applying our theory to examine phenomena like universalism in distributive politics within the EU- and US-systems represents a significant avenue for investigation that remains insufficiently understood. Moreover, cooperative bargaining theory may play a crucial role in future international negotiations at a global level, particularly in designing innovative global governance mechanisms (e.g., climate clubs) for efficient natural resource management.
Lastly, future work should rigorously explore the relationship between equilibrium outcomes in our game and existing legislative bargaining theories. This encompasses not only the connection between our game and non-cooperative bargaining models like BDG, including the conditions under which Black’s Median Voter Theorem can be derived from our game, but also the examination of outcomes in relation to cooperative game theory. For instance, analyzing how equilibrium outcomes in our model correspond to the core outcomes of the underlying voting rule. Additionally, it would be interesting to investigate to what extent our model incorporates classical voting power indices, such as the Banzhaf or the Shapley-Shubik voting power index, as special cases.
Availability of data and material
Not applicable.
Code Availability
The code that has been used in the example of this paper is available from the authors, upon reasonable request.
Notes
Before Banks and Duggan (2000), Baron (1991) examined examples of policymaking in a two-dimensional issue space, assuming three or four legislators and quadratic utilities. Subsequently, Baron (1994, 1996) developed a dynamic theory of legislative choice for collective goods programs, based on a sequential model of proposal-making and voting in a majority-rule legislature, where the status quo in a session is determined by the last enacted program. A stationary Markov perfect equilibrium was characterized in a unidimensional collective goods program, and a generalized median voter theorem was proven. Jackson and Moselle (2002) assumed a unidimensional policy space in addition to a divisible resource.
It is worth noting that, as commonly employed in the literature on legislative bargaining, decision theory, and social choice theory, we interpret \({{\mathcal {X}}}\) as a multidimensional policy space, where each dimension corresponds to a specific policy issue. Consequently, legislators have spatial preferences.
For instance, voting decisions may be influenced by benefits such as social reputation received from other legislators or external actors (e.g., lobbying groups), as well as intrinsic norms (Burden 2007; Carey 2008). These factors are also stochastic and unknown to the legislator who formulates the proposal. Notably, voting against a proposal suggested or favored by a political alliance, or vice versa, voting in favor of a proposal suggested or favored by a political opponent, can result in high disutility regardless of political preferences on policy dimensions.
In particular, the vector \(\delta _i\) can include dummy variables that indicate the proposers of the proposals under consideration. The weights assigned to these dummy variables can be interpreted as the contribution of all unobserved attributes of a proposal to the legislator’s utility. For instance, it can capture the subutility derived from the quality of a proposal as described above.
In the more general case of having two or more choice alternatives, classical random utility maximization (RUM) theory assumes that utilities are independently distributed according to a Gumbel distribution, which is then used to derive the multinomial logit model. However, it has been demonstrated that the multinomial logit model can also be derived under less restrictive assumptions, as shown in (Andersson and Ubøe 2010).
When \(\alpha _j = 0\), it corresponds to a degenerate case where the deterministic utility has no influence on the choice. Similarly, when \(\alpha _j = +\infty\), it results in a degenerate case where only the deterministic utility matters (Andersson and Ubøe 2010). In general, the value of \(\alpha _j\) in the range of \(0< \alpha _j < +\infty\) determines how the difference between observable attributes of proposals, relative to a default proposal, is transformed into choice probabilities. To simplify without loss of generality, we can scale the maximum difference between proposals to one. In this case, \(\frac{1}{1+e^{-\alpha _j}}\) represents the maximal probability that a proposal is chosen compared to a default proposal, while \(\frac{1}{1+e^{\alpha _j}}\) represents the minimal probability. The parameter \(\alpha _j\) plays a crucial role in determining the shape and steepness of the probability distribution over the range of possible utilities, thus influencing the likelihood of different choices.
It is important to highlight that even if all expectations of taste weights were zero, the choice between proposals would still be probabilistic and follow the logistic function as described in Eq. 2.
In line with classical random utility maximization, we assume no learning, experience, or habits that would make probability distributions over conditional utility functions dependent on history.
It is important to note that legislators always have the option to select at least one policy position \(x^* \in X\), for which a corresponding proposal with a (perceived) benchmark quality is strictly preferred to their continuation value, i.e., \(U_i(x^*) + {\mathbb {E}}(\xi _i) > V_i\). Therefore, under the IP procedure, a legislator will never submit a proposal for a final vote that she does not accept. Furthermore, legislators may derive additional utility from accepting their own proposal. Assuming a specific distribution of taste weights for these interaction effects implies that legislators accept their own proposals with a probability of \(\pi _{ii} \equiv 1\) under the IP procedure.
In general, one could also assume interdependent voting decisions among legislators, which would imply different probability functions \(P_i(x,v)\). However, we defer this topic to future research.
Assumed concavity implies directly that utility functions are quasi-concave, but not necessarily strict quasi-concave.
It is worth noting that by considering these two separate subgames, we also allow for a more comprehensive modeling of how legislators accept proposals, incorporating strategies of bounded rationality in future research.
We explicitly exclude the trivial case where all legislators share identical ideal points.
For example, this follows directly when assuming all legislators are risk-averse (see observation 4 in Sect. 5). A formal proof of this statement is available from the authors upon request.
It is worth noting that, in general, for each winning coalition, utility maximization results in a proposal that represents a weighted mean of the proposer’s ideal point and the ideal points of the members of the minimum winning coalition. The relative weight of the members of the minimum winning coalition with respect to the proposer is determined by their individual acceptance sets. When a legislator j is a critical member, meaning that \(U_j(x^{bd}_{ij}) = v_j(x^{bd})\), the corresponding weight is non-zero (\(\omega ^{bd}_{ij,j} > 0\)); otherwise, it is zero. The weight assigned to the proposer depends on the degree of bindingness of the acceptance set of the minimum winning coalition. In other words, the higher the weight of the proposer, the less constraining the acceptance set of the minimum winning coalition is, such as when the continuation value of the other legislator j is lower relative to the utility derived from proposer i’s proposal.
This result can be directly derived from the analytic solution for equilibrium proposals in BDG as presented by Baron (1991).
References
Andersson J, Ubøe J (2010) Some aspects of random utility, extreme value theory and multinomial logit models. Department of Finance and Management Science, Norwegian School of Economics and Business Administration, Discussion Papers, vol 84. https://doi.org/10.2139/ssrn.1564796
Avriel M, Diewert WE, Schaible S, Zang I (2010) Generalized concavity. Soc Ind Appl Math. https://doi.org/10.1137/1.9780898719437
Banks JS, Duggan J (2000) A bargaining model of collective choice. Am Polit Sci Rev 94(01):73–88. https://doi.org/10.2307/2586381
Banks JS, Duggan J (2006) A general bargaining model of legislative policy-making. Q J Polit Sci 1(1):49–85. https://doi.org/10.1561/100.00000001
Baron D, Ferejohn J (1989) Bargaining in legislatures. Am Polit Sci Rev 83:1181–1206
Baron DP (1991) A spatial bargaining theory of government formation in parliamentary systems. Am Polit Sci Rev 85(1):137–164. https://doi.org/10.2307/1962882
Baron DP (1994) A sequential choice theory perspective on legislative organization. Legisl Stud Q XIX(2):267–296
Baron DP (1996) A dynamic theory of collective goods programs. Am Polit Sci Rev 90(2):316–330. https://doi.org/10.2307/2082887
Black D (1958) The theory of committees and elections. Cambridge University Press, London
Burden BC (2007) Personal roots of representation. Princeton University Press, Princeton
Burden BC, Frisby TM (2004) Preferences, partisanship, and whip activity in the us house of representatives. Legisl Stud Q 29(4):569–590
Calvert RL, Dietz N (2005) Legislative coalitions in a bargaining model with externalities. In: Social choice and strategic decisions. Springer, Berlin, pp 227–247. https://doi.org/10.1007/3-540-27295-x_9
Carey JM (2008) Legislative voting and accountability. Cambridge University Press, Cambridge. https://doi.org/10.1017/cbo9780511810077
Carroll R, Lewis JB, Lo J, Poole KT, Rosenthal H (2013) The structure of utility in spatial models of voting. Am J Polit Sci 57(4):1008–1028
Cho S, Duggan J (2003) Uniqueness of stationary equilibria in a one-dimensional model of bargaining. J Econ Theory 113(1):118–130. https://doi.org/10.1016/s0022-0531(03)00087-5
Cho S, Duggan J (2009) Bargaining foundations of the median voter theorem. J Econ Theory 144(2):851–868. https://doi.org/10.1016/j.jet.2008.06.011
Christiansen J, Danilenko N, Dylus S (2016) All sorts of permutations (functional pearl). In: Proceedings of the 21st ACM SIGPLAN international conference on functional programming, (ICFP) in Nara, Japan
Coughlin P (1982) Pareto optimality of policy proposals with probabilistic voting. Public Choice 39(3):427–433. https://doi.org/10.1007/bf00118799
Coughlin P, Nitzan S (1981) Electoral outcomes with probabilistic voting and nash social welfare maxima. J Public Econ 15(1):113–121
Coughlin PJ, Palfrey TR (1985) Pareto optimality in spatial voting models. Soc Choice Welf 1(4):307–319. https://doi.org/10.1007/bf00649266
Davis OA, DeGroot MH, Hinich MJ (1972) Social preference orderings and majority rule. Econometrica 40(1):147. https://doi.org/10.2307/1909727
Davis OA, Hinich MJ (1966) A mathematical model of policy formation in a democratic society. In: Bernd JL (ed) Mathematical Application in Political Science, II. Southern Methodist University Press, Dallas, pp 175–208
Diermeier D, Feddersen TJ (1998) Cohesion in legislatures and the vote of confidence procedure. Am Polit Sci Rev 92:611–621
Downs A (1957) An economic theory of democracy. Harper and Row, New York
Eraslan H, Merlo A (2002) Majority rule in a stochastic model of bargaining. J Econ Theory 103(1):31–48. https://doi.org/10.1006/jeth.2001.2811
Fiorina M (1981) Retrospective voting in American national elections. Yale University Press, New Haven
Franchino F, Rahming AJ (2003) Biased ministers, inefficiency, and control in distributive policies. Eur Union Polit 4(1):11–36. https://doi.org/10.1177/1465116503004001579
Harrington JE (1989) The advantageous nature of risk aversion in a three-player bargaining game where acceptance of a proposal requires a simple majority. Econ Lett 30(3):195–200. https://doi.org/10.1016/0165-1765(89)90225-5
Harrington JE (1990) The power of the proposal maker in a model of endogenous agenda formation. Public Choice 64(1):1–20. https://doi.org/10.1007/bf00125914
Harrington JE (1990) The role of risk preferences in bargaining when acceptance of a proposal requires less than unanimous approval. Journal of Risk and Uncertainty 3(2):135–154. https://doi.org/10.1007/bf00056369
Hinich MJ, Ledyard JO, Ordeshook PC (1973) A theory of electoral equilibrium: a spatial analysis based on the theory of games. J Polit 35(1):154–193. https://doi.org/10.2307/2129041
Hollyer JR, Klašnja M, Titiunik R (2022) Parties as disciplinarians: charisma and commitment problems in programmatic campaigning. Am J Polit Sci 66(1):75–92. https://doi.org/10.1111/ajps.12638
Huber JD (1996) The vote of confidence in parliamentary democracies. Am Polit Sci Rev 90(2):269–282. https://doi.org/10.2307/2082884
Jackson MO, Moselle B (2002) Coalition and party formation in a legislative voting game. J Econ Theory 103(1):49–87. https://doi.org/10.1006/jeth.2000.2688
Kalandrakis T (2006) Proposal rights and political power. Am J Polit Sci 50(2):441–448
Luce D (1959) Individual choice behavior. A theoretical analysis. Wiley, New York
Mangasarian OL (1965) Pseudo-convex functions. J Soc Ind Appl Math Ser A Control 3(2):281–290. https://doi.org/10.1137/0303020
McFadden D (1980) Econometric models for probabilistic choice among products. J Bus 53(3):S13–S29
McFadden D (1981) Econometric models of probabilistic choice. In: Manski CF, McFadden DL (eds) Structural analysis of discrete data and econometric applications. The MIT Press
McKelvey RD, Schofield N (1987) Generalized symmetry conditions at a core point. Econometrica 55(4):923. https://doi.org/10.2307/1911036
Merlo A, Wilson C (1995) A stochastic model of sequential bargaining with complete information. Econometrica 63(2):371. https://doi.org/10.2307/2951630
Napel S (2006) The inter-institutional distribution of power in eu codecision. Soc Choice Welf 26(1):1–26
Plott C (1967) A notation of equilibrium and its possibility under majority rule. Am Econ Rev 57:787–806
Rubinstein A (1982) Perfect equilibrium in a bargaining model. Econometrica 50(1):97–109
Schofield N, Sened I (2002) Local nash equilibrium in multiparty politics. Ann Oper Res 109(1/4):193–211. https://doi.org/10.1023/a:1016304319551
Schofield NJ (2007) The mean voter theorem: necessary and sufficient conditions for convergent equilibrium. Rev Econ Stud 74:965–980. https://doi.org/10.1111/j.1467-937X.2007.00444.x
Shepsle KA (1979) Institutional arrangements and equilibrium in multidimensional voting models. Am J Polit Sci 23:27
Snyder JM, Ting MM, Ansolabehere S (2005) Legislative bargaining under weighted voting. Am Econ Rev 95(4):981–1004
Weingast B (1979) A rational choice perspective on congressional norms. Am J Polit Sci 23(2):245–263
Weingast BR (1994) Reflections on distributive politics and universalism. Politic Res Q 47(2):319–327
Weingast BR, Shepsle KA, Johnsen C (1981) The political economy of benefits and costs: a neoclassical approach to distributive politics. J Polit Econ 89:642–664
Winter E (1996) Voting and vetoing. Am Polit Sci Rev 90(4):813–823. https://doi.org/10.2307/2945844
Wolfe P (1969) Convergence conditions for ascent methods. SIAM Rev 11(2):226–235. https://doi.org/10.1137/1011036
Acknowledgements
We would like to thank the editors and the anonymous reviewers for their thorough evaluations and insightful recommendations, which were instrumental in refining the quality of this manuscript. Further, we acknowledge the editors for their support and guidance throughout the review process.
Funding
Open Access funding enabled and organized by Projekt DEAL. The research leading to these results has received funding from the Federal Ministry of Education and Research (BMBF) under grant agreement no. 031B0231A (MOD_GW_NW).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflicts of interest to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Proofs
Appendix: Proofs
1.1 Appendix 1: Proof of Proposition 4
(a) Using of the assumed form (15) of the derivative \(\nabla P_i(x_i,v)\) and (11) for the derivative of \(U_k\) leads to the following equivalent form of the first order necessary condition (16):
With the above introduced notation \(\lambda _{ki}({X})\), this equation is equivalent to
and can also be formulated as
Hence, the first order necessary condition in Proposition 2 is equivalent to
(b) We have to show that \(\varLambda _i({X})\) is regular. Due to the condition \({X}\in {\mathcal {F}}\), we have \(U_i(x_i)-v_i({X})\ge 0\). \(\sum _{k\in N}A_k(x_i,v({X}))\) was assumed to be positive definite for all \(X\in {{\mathcal {X}}}^n\), \(P_i(x_i,v({X}))\ge 0\) and the matrices \(E_i(x_i)\) are positive definite. Moreover, due to the assumption \({X}\in B_{R_{\mathcal {F}}}({Z})\), we have \(P_i(x_i,v({X}))>0\) so that the matrix \(\varLambda _{i}({X})\) is positive definite and hence invertible.\(\square\).
1.2 Appendix 2: Proof of Proposition 6
Let us introduce the notation
Lemma A.1
Let the problem non-degenerated and assume that there exists \(r\in (0,R_{{\mathcal {F}}}]\) such that the spectral norm of \(\varLambda _i({X})^{-1}{{\tilde{\varLambda }}}_i({X})\) is bounded for all \({X}\in B_r({Z})\) and all \(i\in N\) as:
Then, the mapping property (23) is valid.
Proof
Let \({X}\in B_r({Z})\). The assumption \(r\le R_{{\mathcal {F}}}\) ensures that \({X}\in {\mathcal {F}}\) and therefore \(\phi _i({X})\) is well-defined by the same arguments as in the previous proof. We have still to show that \(\phi _i({X})\in B_r(z_i)\), which corresponds to bound the distance \(\Vert \phi _i({X}) - z_i\Vert _2\) (Euklidian norm). We make use of the following equality (having in mind that \(\varLambda _i({X})\) is invertible):
Therefore, we reformulate the arising sum as
Hence, the mapping property \(\phi _i({X})\in B_r(z_i)\) is ensured, if (34) holds. \(\square\)
Now, we are prepared to prove Proposition 6:
Proof
According to Lemma A.1, it is sufficient to show
Because the spectral norm is sub-multiplicative, we have the upper bound
These two factors on the right hand side are bounded by
and
because \(\varLambda _i({X})\) is of the form \(\varLambda _i({X})=E({X})+P_i(x_i,v(X))E_i(x_i)\) with a positive semi-definite (\({X}\)-dependent) matrix \(E({X})\), and the notation \(\lambda _i(r)\) for the minimal (positive) eigenvalue of \(E_i(x_i)\) for \(\Vert x_i-z_i\Vert _2\le r\). This yields with condition (24):
Hence, the bound (35) is shown and the mapping property follows. \(\square\)
1.3 Appendix 3: Proof of Proposition 7
The Hessian \(H_i=H_i(x_i,{X})\) of \(W_i(x_i,{X})\) is given by
with \(\alpha _1:=U_i(x_i)-v_i({X})\). Because of \(P_i(x_i,v)>0\), the first order optimality condition (16) (at \(X=X^*\)) implies
Hence, \(\alpha _1>0\) and
We obtain the presentation of the Hessian:
Now we use the fact that \(\nabla ^2 U_i(x_i)\) is negative definite, and that the matrix \(\nabla U_i(x_i) \nabla U_i(x_i)^T\) is positive semi-definite. Furthermore, the coefficient \(-2P_i(x_i,v)/\alpha _1\) is negative. In combination with the negative-definiteness of \(\partial _{xx}^2 P_i(x_i,v)\), we obtain that \(H_i\) is negative definite. This shows that \({X}\) satisfies the 1. order and the 2. order optimality condition of a local maximum of \(W_i\).
1.4 Appendix 4: Proof of Proposition 9 (part i)
We introduce a further auxiliary notation for \(C\in D\): (\(u_i:=U_i(x)\))
Lemma A.2
For \(C'\in D_k^C\) and \(C:=C'\cup \{k\}\in D_k\) it holds
Proof
With the short notation \(\pi _j:=\pi _j(u_j,v_j)\) we obtain:
\(\square\)
Lemma A.3
For \(a_k\) defined by (38) it holds for all \(k,i\in N\): \((u_k:=U_k(x))\)
Proof
The lower bound is trivial. For deriving the upper bound we use the presentation (38) for \(a_k(x)\):
It is easy to check that
Therefore,
By using the result of Lemma A.2 and the notation \(D_k^*:=\{C\in {\mathcal {D}}| k\in D\wedge C{\setminus }\{k\}\not \in {\mathcal {D}}\}\) we obtain
Because of \(0\le P_{C}(x)\le P_{C,i}(x)\) for arbitrary \(i\in N\), we arrive at
\(\square\)
Lemma A.4
Let \(\pi _k\) be of the form (7) and \(a_k\) defined by (38). Then it holds
where \(\pi _k'\) denotes the derivative w.r.t. the first argument.
Proof
For \(\pi _k\) of the form (7) holds
Hence, we get \(\pi _k'(u,v)\le \alpha _k\pi _k(u,v)\), and with Lemma A.3 we obtain the assertion (37). \(\square\)
Now we can start to prove Proposition 9:
Proof
We use the criterion of Proposition 6 to show the existence of a fixed point of \(\varPhi\). So we have to derive a lower bound of \(P_i(x,v)/\Vert A_k(x,v)\Vert _2\) for all \(k,i\in N\) with \(k\not =i\) and all x in a closed ball with center in \(z_i\). With Lemma A.4 we obtain
We assumed that the \(\alpha _k\) are suffiently small. So let’s say that \(\alpha _k\le \alpha\) for all k. In order to check the bound (24) we estimate
Now it is obvious that for sufficient small \(\alpha >0\), the bound (24) holds. The appropriate radius r depends on \(\alpha\).
The existence of a point \({X}\in {\mathcal {F}}\) which satisfies the first order condition of a local Nash equilibrium follows now by Propositions 6 and 5.
Next we show that the point \({X}\in {\mathcal {F}}\) that satisfies the first order conditions also satisfies the second order conditions. In detail we show that \(\partial ^2_{xx} P_i(x,v)\) is negative semi-definite for all \(i\in N\). Based on the first derivative \(\partial _x P_i(x,v)\) given in (15) we obtain:
We know that \(A_k(x,v)\) is positive definite. The part \(\partial _x A_k(x,v)(z_k-x)\) is not necessarily negative definite, but it can be split into a positive semi-definite part and an indefinite part as follows: (\(u_k:=U_k(x)\))
Hence,
Since \(\pi _k'(u_k,v_k)\ge 0\) and \(a_k(x,v)\ge 0\), \(C_{k,1}(x,c)\) is positive semi-definite. However, we know that \(\partial _x a_k(x,v)\sim \alpha _k\), so that the positive definite \(C_{k}(x,v)\), and the indefinite part \(C_{k,2}(x,v)\) scale as \(\alpha _k^2\). Therefore, for \(\alpha _k>0\) sufficiently small, its spectral norm \(\Vert \cdot \Vert _2\) is majorized by the spectral norm of \(\sum A_k\):
This implies that \(\partial _{xx}^2 P_i(x,v)\) is negative semi-definite for all \(i\in N\). \(\square\)
1.5 Appendix 5: Proof of Proposition 10
We denote the derivative of the functions \(\pi _i=\pi _{ij}:{\mathbb {R}}^2\rightarrow {\mathbb {R}}\) for \(i\not =j\) in (2) w.r.t the first argument by \(\pi _i'\). The probability \(P_j(x,v)\) is a sum of several probabilities \(P_{N\setminus \{j\},C\setminus \{j\}}(x,v)\). The derivative of \(P_{N\setminus \{j\},C\setminus \{j\}}\) w.r.t. x is given by (\(u_i:=U_i(x)\))
with
This implies
with coefficients
and the sets \(D_k:= \left\{ C\in {\mathcal {D}}\big | k\in C\right\}\), \(D_k^c:= \left\{ C\in {\mathcal {D}}\big | k\not \in C\right\}\). Due to the property (3), for each \(C'\in D_k^c\) it holds \(C:=C'\cup \{k\}\in D_k\) and \(P_{C',k}=P_{C,k}\). This implies \(a_k(x,v)\ge 0\). Due to (11) we have \(\partial _x\pi _k(u_k,v_k)=\pi _k'(U_k(x),v_k)\nabla U_k(x)= \pi _k'(U_k(x),v_k)E_k(x)(z_k-x)\) we arrive at
with \(A_k(x,v):=a_k(x,v)\pi _k'(U_k(x),v_k) E_k(x)\). Since \(a_k,\partial _{u_k}\pi _k\ge 0\) and since \(E_k(x)\) is positive semi-definite, it follows that \(A_k(x)\) is positive semi-definite.
1.6 Appendix 6: Proof of Proposition 12
Maximizing \(S_i\) delivers the following first order condition:
Because we have individual utility functions of the form (13), (39) is equivalent to
Taking into account that the matrices \(E_k\) are positive definite, that \(\omega _{k,i}\ge 0\) and that \(\sum _{k\in N} \omega _{k,i}\ge \omega _{i,i}>0\) implies that \(M:=\sum _{k\in N} \omega _{k,i} E_k\) is positive and therefore invertible. We hence obtain that (39) is equivalent to
For the particular choice of the weights as in (27), this equation is solely fulfilled for \(x=x_i\), see Corollary 11. Furthermore, \(\nabla ^2 S_i(x)=-M\) is negative definite, so that \(x_i\) is a local maximum of \(S_i\). Since \(S_i\) has only one local extrema, this is also a global maximum.
1.7 Appendix 7: Proof of Proposition 9 (part ii)
In this subsection we derive a sufficient criterion for a special structures function to be pseudo-concave. To this end let \(K\subset {\mathbb {R}}^n\) be a compact set and \(u=(u_1,\ldots ,u_m):K\rightarrow {\mathbb {R}}^m\) a vector-valued \(C^2\)-function with negative definite Hessians \(\nabla ^2 u_i\). Further, let \(q:u(K)\rightarrow {\mathbb {R}}_+\) be twice continuously differentiable with non-negative partial derivatives \(\partial _i q \ge \mu _i\ge 0\). The function we want to analyze is \(w:=(q\circ u)(u_k-c):K\rightarrow {\mathbb {R}}\) for a certain \(k\in \{1,\ldots ,m\}\) and \(c\in {\mathbb {R}}\):
The following Lemma gives us a sufficient criterion for w being pseudo-concave.
Lemma A.5
For the function w defined in (40) we assume:
-
(i)
\(u_k\ge c\) in K,
-
(ii)
all partial derivatives of q are positive in u(K): \(\partial _i q(y) > 0\) for all \(y\in u(K)\),
-
(iii)
the Hessians \(H_{i}:=\nabla ^2 u_i(x)\) are uniformly negative definite, i.e.
$$\begin{aligned} \langle H_i v,v\rangle\le & {} -\gamma _i\Vert v\Vert _2^2\qquad \forall v\in {\mathbb {R}}^n. \end{aligned}$$for certain \(\gamma _i>0\),
-
(iv)
the definiteness parameter \(\gamma _i\) in (iii) are sufficiently large, more exactly: For all \(y\in u(K)\):
$$\begin{aligned} \min _{k=1,\ldots ,m}\gamma _k\,\ge\ & {} \frac{2d^2}{q(y)}\sum _{i=1}^m \partial _iq(y) \\ \text{ and }\qquad \gamma _i\,\ge\ & {} \frac{d^2}{\partial _iq(y)} \sum _{j=1}^m |\partial ^2_{ij} q(y)|\qquad \forall i\in \{1,\ldots ,n\}, \end{aligned}$$with \(d:=\max \{\Vert \nabla u_i(x)\Vert _2: x\in K\}\).
Under these assumptions, w is pseudo-concave.
Proof
We assume that for \(x,y\in K\) it holds for the Euklidian inner product
We have to verify that this already implies that \(w(x)\ge w(y)\). By Taylor expansion, we obtain with a certain convex combination \(\xi\) of x and y:
In order to express the Hessian of w, we use the shorter notations \(\eta :=u(\xi )\), \(u_k:=u_k(\xi )\), \(q:=q(u(\xi ))\), and \(H_{ij}:=\nabla u_j \nabla u_i^T\). Now, the Hessian of w reads:
Now, we show that this Hessian is negative semi-definite. \(qH_k\) and \((u_k-c)\partial _{i}q H_i\) are negative definite. The remaining parts \((u_k-c)\partial ^2_{ij} q H_{ij}\) and \(2 \partial _{i}qH_{ik}\) are indefinite, but are dominated by the negative definite parts due to assumption (iv):
\(\square\)
Now we are able to prove part (ii) of Proposition 9. We have to show that for coalition voting (4) with utilities (13), and individual acceptance functions of the form (7) with sufficient small positive parameters \(\alpha _i\), the functions \(W_i(x,\cdot )\) are pseudo-concave.
Proof
In our particular case, the functions \(u_i\) are given by the utility functions \(u_i(x)=-\frac{1}{2}\Vert B_i^{1/2}(x-z_i)\Vert _2^2\). The gradients are \(\nabla u_i= B_i(z_i-x)\), and the parameter d of condition (iv) in Lemma A.5 becomes \(d=\max \{\Vert B_i(z_i-x)\Vert _2: x\in K\}\le \max _i \Vert B_i\Vert _2 \text{ diam }(K)\). The Hessians are \(H_i=-B_i\), \(\langle H_i v,v\rangle :=-\Vert B_i^{1/2}v\Vert _2^2\le -\lambda _{i,min}\Vert v\Vert ^2\), with the minimal (positive) eigenvalue \(\lambda _{i,min}\) of \(B_i\), hence \(\gamma _i=\lambda _{i,min}\). The function q in the case of coalition voting (4 becomes for a fixed j (we suppress for ease of presentation the v-dependency of \(\pi _j\)):
with partial first and second derivatives
From \(\pi _i(u)=(1+\exp (\alpha _i(v_i-u))^{-1}\) (see eq.(7)) we get
The quotients \(| \partial _k a_i(u)|/a_i(u)\) are of a very similar form and can be bounded from above by \(\alpha _k\), s.t
and, hence, for all \(\alpha _i\) sufficiently small compared to \(\gamma _i\), \(\sum _{k=1}^m\alpha _k + \alpha _i\le d^{-2}\gamma _i\), the function w is pseudo-concave. \(\square\)

Normalized prediction error of BHZG predicting BDG decision outcome

Expected decision of BHZG and BDG

Decision power of legislator 3 derived from BHZG and BDG

Expected decision of BHZG and BDG by preference scenario (\(0.5 \le \lambda \le 1.37\)) and recognition probability (\(0 \le q_3 \le 0.9\)) for all 400 simulations. The horizontal values denote the preference scenario (\(\lambda\)), while the rotated values denote the recognition probability of legislator 3 (\(q_3\))

Decision power of legislator 3 derived from BHZG and BDG by preference scenario (\(0.5 \le \lambda \le 1.37\)) and recognition probability (\(0 \le q_3 \le 0.9\)) for all 400 simulations. The horizontal values denote the preference scenario (\(\lambda\)), while the rotated values denote the recognition probability of legislator 3 (\(q_3\))
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Braack, M., Henning, C. & Ziesmer, J. Pure strategy Nash equilibria for bargaining models of collective choice. Int J Game Theory 53, 373–421 (2024). https://doi.org/10.1007/s00182-023-00882-z
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00182-023-00882-z