
Abstract
The Rock–scissors–paper game has been studied to account for cyclic behaviour under various game dynamics. We use a two-person parametrised version of this game. The cyclic behaviour is observed near a heteroclinic cycle, in a heteroclinic network, with two nodes such that, at each node, players alternate in winning and losing. This cycle is shown to be as stable as possible for a wide range of parameter values. The parameters are related to the players’ payoff when a tie occurs.



Similar content being viewed by others

Notes
Other dynamics in the RSP game can lead to stable isolated limit cycles yielding periodic oscillatory dynamics of all actions that favor long-term coexistence. See, for instance, Gaunersdörfer and Hofbauer (1995) with the extension to best response dynamics, and Mobilia (2010) and Toupo and Strogatz (2015) in the context of populations under mutations.
Equilibria are sometimes called fixed points or steady states, and nodes in the context of heteroclinic dynamics.
The superscript T indicates the transpose of a matrix in general.
Step 1 has been made this simple by an anonymous reviewer whom we thank.
We say that two square matrices of the same order, A and B, are similar if there exists an invertible matrix P such that \(B=P^{-1}AP\). In particular, similar matrices have the same characteristic polynomial. In this case, we have \(M_0^{-1}M^{(1)}M_0=M^{(0)}\).
We thank an anonymous reviewer for pointing this similarity out to us.
We are, in fact, interested in the non-zero-sum game corresponding to \(\varepsilon _x+\varepsilon _y\ne 0\).
The second author and S. van Strien have work in preparation concerning this point.
References
Aguiar MAD, Castro SBSD (2010) Chaotic switching in a two-person game. Phys D 239(16):1598–1609
Arnold LG (2000) Stability of the market equilibrium in Romer’s model of endogenous technological change: a complete characterization. J Macroecon 22(1):69–84
Brannath W (1994) Heteroclinic networks on the tetrahedron. Nonlinearity 7(5):1367–1384
Field M (1996) Lectures on bifurcations, dynamics and symmetry. Pitman Research Notes in Mathematics Series, vol. 356, Longman
Garrido-da-Silva L (2018) Heteroclinic dynamics in game theory. PhD thesis, University of Porto
Garrido-da-Silva L, Castro SBSD (2019) Stability of quasi-simple heteroclinic cycles. Dyn Syst 34(1):14–39
Gaunersdörfer A, Hofbauer J (1995) Fictitious play, shapley polygons, and the replicator equation. Games Econ Behav 11:279–303
Golubitsky M, Stewart IN, Schaeffer DG (1988) Singularities and groups in bifurcation theory, vol 2. Springer, New York
Hofbauer J, Sigmund K (1998) Evolutionary games and population dynamics. Cambridge University Press, Cambridge
Hofbauer J, Sorin S, Viossat Y (2009) Time average replicator and best reply dynamics. Math Oper Res 10(2):263–269
Hopkins E, Seymour RM (2002) The stability of price dispersion under seller and consumer learning. Int Econ Rev 43(4):1157–1190
Krupa M, Melbourne I (2004) Asymptotic stability of heteroclinic cycles in systems with symmetry II. Proc R Soc Edinburgh SectMath 134:1177–1197
Lohse A (2015) Stability of heteroclinic cycles in transverse bifurcations. Phys D 310:95–103
Melbourne I (1991) An example of a non-asymptotically stable attractor. Nonlinearity 4(3):835–844
Mobilia M (2010) Oscillatory dynamics in rock-paper-scissors games with mutations. J Theor Biol 264:1–10
Noel MD (2007) Edgeworth price cycles: evidence from the Toronto retail gasoline market. J Ind Econ 55(1):69–92
Olszowiec C (2016) Complex behaviour in cyclic competition bimatrix games ArXiv arXiv:1605.00431v4
Podvigina O (2012) Stability and bifurcations of heteroclinic cycles of type \(Z\). Nonlinearity 25(6):1887–1917
Podvigina O, Ashwin P (2011) On local attraction properties and a stability index for heteroclinic connections. Nonlinearity 24(3):887–929
Sato Y, Akiyama E, Crutchfield JP (2005) Stability and diversity in collective adaptation. Phys D 210(12):21–57
Sato Y, Akiyama E, Farmer JD (2002) Chaos in learning a simple two-person game. Proc Natl Acad Sci 99(7):4748–4751
Sigmund K (2011) Introduction to evolutionary game theory. Proc Symp Appl Math 69:21–57
van Strien S, Sparrow C (2011) Fictitious play in \(3 \times 3\) games: chaos and dithering behaviour. Games Econ Behav 73:262–286
Szolnoki A, Mobilia M, Jiang L-L, Szczesny B, Rucklidge AM, Perc M (2014) Cyclic dominance in evolutionary games: a review. J R Soc Interface 11:20140735
Taylor PD, Jonker LB (1978) Evolutionary stable strategies and game dynamics. Math Biosci 40:145–156
Toupo DFP, Strogatz SH (2015) Nonlinear dynamics of the rock-paper-scissors game with mutations. Phys Rev E 91:052907
Varian H (1980) A model of sales. Am Econ Rev 70:651–659
Zeeman EC (1980) Population dynamics from game theory. In: Nitecki Z, Robinson C (eds) Global theory of dynamical systems. Lecture Notes in Mathematics, vol. 819. Springer, Berlin
Acknowledgements
The second author is grateful to A. Rucklidge for an interesting conversation. The two authors were partially supported by CMUP (UID/MAT/00144/2013), which is funded by FCT (Portugal) with national (MEC) and European structural funds (FEDER), under the partnership agreement PT2020. L. Garrido-da-Silva is the recipient of the doctoral grant PD/BD/105731/2014 from FCT (Portugal).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Transitions near the RSP cycles
In this section we describe the construction of Poincaré maps (also called return maps) from and to cross sections of the flow near each node once around an entire heteroclinic cycle. The Poincaré maps are the composition of local and global maps. The local maps approximate the flow in a neighbourhood of a node. The global maps approximate the flow along a heteroclinic connection between two consecutive nodes.
Near \(\xi _j\) we introduce an incoming section \(H_{j}^{in,i}\) across the heteroclinic connection \(\left[ \xi _{i}\rightarrow \xi _{j}\right] \) and an outgoing section \(H_{j}^{out,k}\) across the heteroclinic connection \(\left[ \xi _{j}\rightarrow \xi _{k}\right] \), \(j \ne i,k\). By definition, these are five-dimensional subspaces in \({\mathbb {R}}^6\). Krupa and Melbourne (2004) have shown that not all dimensions are important in the study of stability of heteroclinic cycles as follows.
1.1 Poincaré maps
Assume that the flow is linearisable about each node (see Proposition 4.1. in Aguiar and Castro (2010) for detailed conditions). Locally at \(\xi _j\), we denote by \(-c_{ji}<0\) the eigenvalue in the stable direction through the heteroclinic connection \(\left[ \xi _{i}\rightarrow \xi _{j}\right] \) and \(e_{jk}>0\) the eigenvalue in the unstable direction through the heteroclinic connection \(\left[ \xi _{j}\rightarrow \xi _{k}\right] \). As illustrated in Fig. 4a each node has two incoming connections and two outgoing connections. Looking at \(\xi _j\) from the point of view of the sequence of heteroclinic connections \(\left[ \xi _i\rightarrow \xi _j\rightarrow \xi _k\right] \), we say that \(-c_{ji}\) is contracting, \(e_{jk}\) is expanding, \(-c_{jl}\) and \(e_{jm}\) are transverse with \(j \ne i,k,l,m\), \(i \ne l\) and \(k \ne m\) (see Garrido-da-Silva and Castro 2019; Krupa and Melbourne 2004; Podvigina 2012; Podvigina and Ashwin 2011).

Representation of a the eigenvalues and b the cross sections near a node \(\xi _j\) with \(j \ne i,k,l,m\), \(i \ne l\) and \(k \ne m\)
The linearised flow in the relevant local coordinates near \(\xi _j\) is given by
such that v, w and \((z_1,z_2)\) correspond, respectively, to the contracting, expanding and transverse directions. Table 2 provides all eigenvalues restricted to these directions for the three nodes \(\xi _0\), \(\xi _1\) and \(\xi _2\).
All cross sections are reduced to a three-dimensional subspace and can be expressed as (see Fig. 4b)
We construct local maps \(\phi _{ijk}:H_{j}^{in,i}\rightarrow H_{j}^{out,k}\) near each \(\xi _j\), global maps \(\psi _{jk}:H_{j}^{out,k}\rightarrow H_{k}^{in,j}\) near each heteroclinic connection \(\left[ \xi _{j}\rightarrow \xi _{k}\right] \), and their compositions \(g_{j}=\psi _{jk} \circ \phi _{ijk}:H_{j}^{in,i}\rightarrow H_{k}^{in,j}\), \(j \ne i,k\). Composing the latter successively along an entire heteroclinic cycle yields the Poincaré maps \(\pi _j:H_j^{in,i} \rightarrow H_{j}^{in,i}\), one for each heteroclinic connection belonging to the heteroclinic cycle.
Integrating (10) we find
On the other hand, expressions for global maps depend both on which heteroclinic connection and heteroclinic cycle one considers. Following the Remark on p. 1603 of Aguiar and Castro (2010), in the leading order any global map \(\psi _{jk}\) is well represented by a permutation.
We describe the details for the cycle \(C_0=\left[ \xi _0\rightarrow \xi _1\rightarrow \xi _0\right] \). The other cases are similar, and therefore, we omit the calculations. Notice that
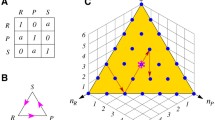
We pick, respectively, the heteroclinic connections \(\left[ (\text {R},\text {P}) \rightarrow (\text {S},\text {P}) \right] \) and\(\left[ (\text {S},\text {P}) \rightarrow (\text {S},\text {R}) \right] \) as representatives of \(\left[ \xi _0 \rightarrow \xi _1\right] \) and \(\left[ \xi _1 \rightarrow \xi _0\right] \), see Table 1. Considering the flow linearised about each representative heteroclinic connection the global maps have the form
The pairwise composite maps \(g_{0}=\psi _{01} \circ \phi _{101}\) and \(g_{1}=\psi _{10} \circ \phi _{010}\) are
The dynamics in the vicinity of the \(C_0\)-cycle is accurately approximated by the two Poincaré maps \(\pi _{0}=g_{1} \circ g_{0}\) and \(\pi _{1}=g_{0} \circ g_{1}\) with
for \(0<z_{2}<w^{\textstyle \frac{1+\varepsilon _x}{2}}\) and \(z_1>w^{\textstyle \frac{3+\varepsilon _y^2}{2\left( 1+\varepsilon _y\right) }}\),
for \(0<z_{2}<w^{\textstyle \frac{1+\varepsilon _y}{2}}\) and \(z_1>w^{\textstyle \frac{3+\varepsilon _x^2}{2\left( 1+\varepsilon _x\right) }}\).
1.2 Transition matrices
Consider the change of coordinates
The maps \(g_{j}:H_j^{in,i}\rightarrow H_k^{in,j}\), \(j \ne i,k\), become linear
and \(M_j\) are called the basic transition matrices. For the Poincaré maps \(\pi _j:H_j^{in,i} \rightarrow H_j^{in,i}\) the transition matrices are the product of basic transition matrices in the appropriate order. We denote them by \(M^{(j)}\).
The basic transition matrices of the maps \(g_0\) and \(g_1\) in (11) with respect to \(C_0\) are
Then, the products \(M^{(0)}=M_1 M_0\) and \(M^{(1)}=M_0 M_1\) provide the transition matrices (see Fig. 5) of the Poincaré maps \(\pi _0\) in (12) and \(\pi _1\) in (13):

Definition of the transition matrices a \(M^{(0)}=M_1M_0\) and b \(M^{(1)}=M_0M_1\) around the \(C_0\)-cycle. The matrix \(M_0\) corresponds to the transformation represented by a dotted line and \(M_1\) to that represented by a dashed line
Analogously, this process yields the transition matrices for the remaining heteroclinic cycles. We use different accents according to the heteroclinic cycle: for \(C_1\),
where
for \(C_2\),
where
for \(C_3\),
where
and, for \(C_4\),
where
The stability index
Each Poincaré map \(\pi _j:{\mathbb {R}}^3\rightarrow {\mathbb {R}}^3\) induces a discrete dynamical system through the relation \({\varvec{x}}_{k+1}=\pi _j \left( {\varvec{x}}_k\right) \), where \({\varvec{x}}_k=\left( w_k,z_{1,k},z_{2,k}\right) \) denotes the state at the discrete time k. The stability of a heteroclinic cycle then follows from the stability of the fixed point at the origin of Poincaré maps around the former.
As in Podvigina (2012) and Podvigina and Ashwin (2011), for \(\delta >0\) let \({{{\mathcal {B}}}}_{\delta }^{\pi _j}\) be the \(\delta \)-local basin of attraction of \({\varvec{0}}\in {\mathbb {R}}^3\) for the map \(\pi _j\). Roughly speaking, \({{{\mathcal {B}}}}_{\delta }^{\pi _j}\) is the set of all initial conditions near \(\xi _j\) whose trajectories remain in a \(\delta \)-neighbourhood of the heteroclinic cycle and converge to it.
We use \(\left\| \cdot \right\| \) to express Euclidean norm on \({\mathbb {R}}^3\). Taking, for example, the Poincaré map \(\pi _0\) in (12) with respect to the \(C_0\)-cycle the local basin \({{{\mathcal {B}}}}_{\delta }^{\pi _0}\) is defined to be
In the new coordinates \(\varvec{\eta }\) (14) the origin in \({\mathbb {R}}^3\) becomes \(-\varvec{\infty }\). For asymptotically small \({\varvec{x}}=\left( w,z_1,z_2\right) \in {{{\mathcal {B}}}}_{\delta }^{\pi _j}\) the requirement (as in (16)) that the iterates \(\pi _j^k({\varvec{x}})\) approach \({\varvec{0}}\) (hence the heteroclinic cycle) as \(k\rightarrow \infty \) corresponds to all asymptotically large negative \(\varvec{\eta }\) such that
For \(M=M^{(j)}\) we denote the set of points satisfying (17) by \(U^{-\infty }\left( M\right) \). Lemma 3 in Podvigina (2012), together with its reformulation as Lemma 3.2 in Garrido-da-Silva and Castro (2019), provide necessary and sufficient conditions for \(U^{-\infty }\left( M\right) \) having a positive measure. The conditions depend on the dominant eigenvalue and the associated eigenvector of M. We transcribe the result in its useful form in the following
Lemma B.1
(adapted from Lemma 3 in Podvigina (2012)). Let \(\lambda _{\max }\) be the maximum, in absolute value, eigenvalue of the matrix \(M:{\mathbb {R}}^N \rightarrow {\mathbb {R}}^N\) and \({\varvec{w}}^{\max }=\left( w_1^{\max },\ldots ,w_N^{\max }\right) \) be an associated eigenvector. Suppose \(\lambda _{\max } \ne 1\). The measure \(\ell \left( U^{-\infty }(M)\right) \) is positive if and only if the three following conditions are satisfied:
-
(i)
\(\lambda _{\max }\) is real;
-
(ii)
\(\lambda _{\max }>1\);
-
(iii)
\(w_{l}^{\max }w_{q}^{\max }>0\) for all \(l,q=1,\ldots N\).
1.1 The function \(F^\mathrm{{index}}\)
The function \(F^{\text {index}}:{\mathbb {R}}^N \rightarrow {\mathbb {R}}\) used to calculate the stability indices along heteroclinic connections is constructed in Garrido-da-Silva and Castro (2019).
For \(N=3\) and any nonzero \(\varvec{\alpha }=\left( \alpha _1,\alpha _2,\alpha _3\right) \in {\mathbb {R}}^3\) denote \(\alpha _{\min }=\min \left\{ \alpha _1,\alpha _2,\alpha _3\right\} \) and \(\alpha _{\max }=\max \left\{ \alpha _1,\alpha _2,\alpha _3\right\} \). From Appendix A.1 in Garrido-da-Silva and Castro (2019) we have
with \(F^{-}(\varvec{\alpha })=F^{+}(-\varvec{\alpha })\) where
and
It then follows that
Rights and permissions
About this article

Cite this article
Garrido-da-Silva, L., Castro, S.B.S.D. Cyclic dominance in a two-person rock–scissors–paper game. Int J Game Theory 49, 885–912 (2020). https://doi.org/10.1007/s00182-020-00706-4
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00182-020-00706-4