
Abstract
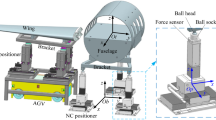
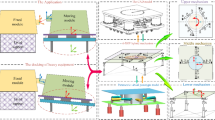
In the digital assembly system of large aircraft components (LAC), multiple numerical control positioners (NCPs) are usually used as actuators to adjust the position and posture of LAC to realize the docking of LAC. The posture adjustment mechanism (PAM) composed of multiple NCPs is a redundant actuated parallel mechanism (RAPM). The traditional full position control (FPC) method may lead to interference between NCPs, resulting in the deformation of NCPs and bracket, affecting the service life of the equipment. This paper proposes a posture adjustment method based on hybrid control, which divides the motion axes of the NCPs into the position control axis and the force control axis to avoid the internal force of posture adjustment caused by the cooperative motion error of the NCPs. The driving force of the axis of the RAPM under the same posture adjustment trajectory is uncertain. To further reduce the internal force of posture adjustment, a driving force distribution method based on the dynamic model of PAM is proposed. Then, the principle of selecting the position control axis of the PAM is analyzed, and the optimization strategy of the position control axis based on the condition number of the Jacobian matrix is studied to improve the motion performance of the PAM. Finally, the posture adjustment experiment of LAC is carried out. The results show that the hybrid control method based on the optimum contact force can significantly reduce the interaction force between NCPs. The experimental results of posture adjustment accuracy verification show that the optimization strategy of position control axis makes the accuracy of single posture adjustment meet the requirements of LAC docking, which can effectively improve the docking efficiency of LAC.















Similar content being viewed by others

References
Mei Z, Maropoulos PG (2014) Review of the application of flexible, measurement-assisted assembly technology in aircraft manufacturing. Proc Inst Mech Eng Part B: J Eng Manuf 228(10):1185–1197
Wu D, Du F (2018) A new method of precise orientation adjustment based on matrix similarity for large-scale component. Assem Autom 38(2):207–215
Chen Y, Zhou F, Zhou M, Zhang W, Li X (2020) Pose measurement approach based on two-stage binocular vision for docking large components, Measur Sci Technol 31(12):125002. https://doi.org/10.1088/1361-6501/aba5c7
Tang W, Li Y, Yu J, Zhang J, Sun Y (2013) A posture evaluation method for aircraft wing based on a simple measurement system. Proc Inst Mech Eng Part B: J Eng Manuf 227(4):627–630
Peng G, Ji M, Xue Y, Sun Y (2021) Development of a novel integrated automated assembly system for large volume components in outdoor environment. Measurement 168:
Li S, Chu W, Huang X (2020) Measurement method of aircraft barycenter based on multi posture. Sens Rev 40(2):217–226
Eastwood SJ, Webb P, McKeown C (2003) The use of the TI2 manufacturing system on a double-curvature aerospace panel. Proc Inst Mech Eng Part B: J Eng Manuf 217(6):849–855
Guo HJ (2011) Key technology of aircraft digital flexible assembly line. Aeronaut Manuf Technol 17:38–43
Rooks B (2001) Automatic wing box assembly developments. Ind Robot 28(4):297–302
Webb P, Eastwood S, Jayaweera N, Chen Y (2005) Automated aerostructure assembly. Ind Robot 32(5):383–387
Li S, Deng Z, Zeng Q, Huang X (2018) A coaxial alignment method for large aircraft component assembly using distributed monocular vision. Assem Autom 38(4):437–449
Zhang B, Yao B, Ke Y (2009) A novel posture alignment system for aircraft wing assembly. J Zhejiang Univ Sci A 10:1624–1630
Chakarov D (2004) Study of the antagonistic stiffness of parallel manipulators with actuation redundancy. Mech Mach Theory 39(6):583–601
Lee S, Lee J, Yi B, Kim S, Kwak Y (2005) Optimization and experimental verification for the antagonistic stiffness in redundantly actuated mechanisms: a five-bar example. Mechatronics 15(2):213–238
O’Brien JF, Wen JT (1999) Redundant actuation for improving kinematic manipulabi ity. Proc 1999 IEEE Int Conf Robot Autom 2:1520–1525
Nahon MA, Angeles J (1989) Force optimization in redundantly-actuated closed kinematic chains. Proc 1989 International Conf Robot Autom 2:951–956
Kumar V, Gardner JF (1990) Kinematics of redundantly actuated closed chains. IEEE Trans Robot Autom 6(2):269–274
Kokkinis T, Millies P (1991) A parallel robot-arm regional structure with actuational redundancy. Mech Mach Theory 26(6):629–641
Choudhury P, Ghosal A (2000) Singularity and controllability analysis of parallel manipulators and closed-loop mechanisms. Mech Mach Theory 35(10):1455–1479
Nokleby SB, Fisher R, Podhorodeski RP (2005) Force capabilities of redundantly-actuated parallel manipulators. Mech Mach Theory 40(5):578–599
Huang P, Wang Q, Li J, Ke Y, Zhang C (2014) Adjustment optimal trajectory planning of aircraft component based on dynamics model. Acta Aeronaut ET Astronaut Sin 35(9):2672–2682
Guo Z, Jiang J, Ke Y (2009) Design and accuracy for POGO stick with three-axis. J Zhejiang Univ (Eng Sci) 43(9):1649–1654
Xu Y, Yao J, Zhao Y (2012) Inverse dynamics and internal forces of the redundantly actuated parallel manipulators. Mech Mach Theory 51:172–184
Zhu Y, H X, Fang W, Li S, (2010) Trajectory planning algorithm based on quaternion for 6-dof aircraft wing automatic position and pose adjustment method. Chin J Aeronaut 23(6):707–714
Tao J, Luh JYS (1992) Robust position and force control for a system of multiple redundant-robots. Proc 1992 IEEE Int Conf Robot Autom 3:2211–2216
Kim H S (2012) Kinematically redundant parallel haptic device with large workspace. Int J Adv Robot Syst
Tang H, Liang S, Yao J, Guo L, Zhao Y (2011) Hybrid force/position control hardware system design and force servo control realization. Adv Mater Res 317–319:685–689
Procházka F, Valáše M, Šika Z (2016) Robust sliding mode control of redundantly actuated parallel mechanisms with respect to geometric imperfections. Multibody Syst Dyn 36(3):221–236
Yi Y, Chen MJE, Y X, (2006) Fault tolerance of parallel manipulators using task space and kinematic redundancy. IEEE Trans Rob 22(5):1017–1021
Chu W, Huang X (2020) Posture adjustment method for large components of aircraft based on hybrid force-position control. Ind Robot 47(3):381–393
Zhang B, Fang Q, Ke Y (2008) Optimal time trajectory planning method for a kind of posture aligning system of large rigid bodies. J Mech Eng 44(8):248–252
Walker ID, Freeman RA, Marcus SI (1991) Analysis of motion and internal loading of objects grasped by multiple cooperating manipulators. Int J Robot Res 10(4):396–409
Deng Z, Huang X, Li S, Xing H (2019) On-line calibration and uncertainties evaluation of spherical joint positions on large aircraft component for zero-clearance posture alignment. Robot Comput-Integr Manuf 56:38–54
Zeng Q, Li S, Huang X (2021) Configuration optimization of the feature-oriented reference system in large component assembly. Int J Adv Manuf Technol 113:673–687
Predmore CR (2010) Bundle adjustment of multi-position measurements using the Mahalanobis distance. Precis Eng 34(1):113–123
Dasgupta B, Mruthyunjaya TS (1998) A Newton-Euler formulation for the inverse dynamics of the Stewart platform manipulator. Mech Mach Theory 33(8):1135–1152
Chu W, Huang X (2022) Self-calibration method of NC positioner for posture adjustment. Int J Adv Manuf Technol 119:7669–7683
Gao J, Zheng R, Zhao Y (2005) Actuating input selection of 5-UPS/PRPU parallel machine tool. Proceedings of the ASME 2005 international design engineering technical conferences and computers and information in engineering conference 7:583–587
Kardoš J (2010) Contact force control in the robot end-point. Proc Eng 2(1):563–572
Author information
Authors and Affiliations
Contributions
Wenmin Chu: methodology, simulation, data curation, analysis, experiment approach, writing; Gen Li: validation, supervision, review and editing; Shuanggao Li: experiment platform, editing the manuscript; Xiang Huang: providing the problem and the industrial requirements, project administration.
Corresponding author
Ethics declarations
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
All the authors listed approved the publication of the manuscript.
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chu, W., Li, G., Li, S. et al. Posture adjustment method of large aircraft components based on multiple numerical control positioners. Int J Adv Manuf Technol 126, 2159–2174 (2023). https://doi.org/10.1007/s00170-023-11262-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-023-11262-y