
Abstract
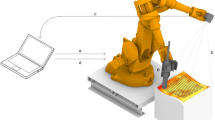
We introduce an autonomous laser kirigami technique, a novel custom manufacturing machine system which functions somewhat similar to a photocopier. This technique is capable of creating functional freeform shell structures using cutting and folding (kirigami) operations on sheet precursors. Conventional laser kirigami techniques are operated manually and rely heavily on precise calibrations. However, it is unrealistic to design and plan out the process (open loop) to realize arbitrary geometric features from a wide variety of materials. In our work, we develop and demonstrate a completely autonomous system, which is composed of a laser system, a 4-axis robotic arm, a real-time vision-based surface deformation monitoring system, and an associated control system. The laser system is based on the Lasersaur, which is a 120-Watt CO2 open-source laser cutter. The robotic arm is employed to precisely adjust the distance between a workpiece and the laser lens so that a focused and defocused laser beam can be used to cut and fold the workpiece respectively. The four-axis robotic arm provides flexibility for expanding the limits of possible shapes, compared to conventional laser machine setups where the workpiece is fixed on rigid holders. The real-time vision-based surface deformation monitoring system is composed of four low-cost cameras, an integrated AI-assisted algorithm, and the sensors (detachable planar markers) mounted on the polymer-based sheet precursors, and allows real-time monitoring of the sheet forming process with a geometric feature estimation error less than 5% and delay time around 100 ms. The developed control system manages the laser power, the laser scanning speed, the motion of the robotic arm based on the designed plan, and the close-loop feedback provided by the vision-based surface deformation monitoring system. This cyber-physical kirigami platform can operate a sequence of cutting and folding processes in order to create kirigami objects. Hence, complicated kirigami design products with various different polygonal structures can be realized by undergoing sequential designed laser cuts and bends (at any folding angles within designed geometric tolerance) using this autonomous kirigami platform.













Similar content being viewed by others

References
Kim KD, Kumar PR (2012) Cyber–physical systems: a perspective at the centennial. Proc IEEE 100(Special Centennial Issue):1287
Baheti R, Gill H (2011) Cyber-physical systems. The impact of control technology 12(1):161
Wright P (2014) Cyber-physical product manufacturing. Manuf Lett 2(2):49
Lee J, Bagheri B, Kao HA (2015) A cyber-physical systems architecture for industry 4.0-based manufacturing systems. Manuf Lett 3:18
Peraza-Hernandez EA, Hartl DJ, Malak Jr R.J., Lagoudas DC (2014) Origami-inspired active structures: a synthesis and review. Smart Materials and Structures 23(9):094001
Liu Y, Genzer J, Dickey MD (2016) 2D or not 2D: shape-programming polymer sheets. Prog Polym Sci 52:79
Bartkowiak K, Edwardson S, Borowski J, Dearden G, Watkins K (2005) Laser forming of thin metal components for 2D and 3D applications using a high beam quality, low power Nd: YAG laser and rapid scanning optics. In: International Workshop on Thermal Forming, Bremen, vol 26
Li W, Yao YL (2001) Laser bending of tubes: mechanism, analysis, and prediction. J Manuf Sci Eng 123(4):674
Gisario A, Mehrpouya M, Venettacci S, Mohammadzadeh A, Barletta M (2016) LaserOrigami (LO) of three-dimensional (3D) components: Experimental analysis and numerical modelling. J Manuf Process 23:242
Gisario A, Barletta M, Venettacci S, Veniali F (2015) External force-assisted LaserOrigami (LO) bending: shaping of 3D cubes and edge design of stainless steel chairs. J Manuf Process 18: 159
Mulay S, Paliwal V, Babu NR (2020) Analytical model for prediction of bend angle in laser forming of sheets. Int J Adv Manuf Technol 109(3):699
Guo Y, Shi Y, Wang X, Sun R, Bing Z (2020) An analytical model of laser bending angle under preload. Int J Adv Manuf Technol 108(7):2569
Ma PJ, Hao Y, Lien JM, Peraza Hernandez EA (2020) Metal forming with laser origami: parameter analysis and optimization. In: ASME international mechanical engineering congress and exposition, vol 84492. American Society of Mechanical Engineers, p V02BT02A028
Mueller S, Kruck B, Baudisch P (2013) LaserOrigami: laser-cutting 3D objects. In: Proceedings of the SIGCHI conference on human factors in computing systems. ACM, pp 2585–2592
Umapathi U, Chen HT, Mueller S, Wall L, Seufert A, Baudisch P (2015) LaserStacker: Fabricating 3D objects by laser cutting and welding. In: Proceedings of the 28th Annual ACM symposium on user interface software & technology. ACM, pp 575–582
Beyer D, Gurevich S, Mueller S, Chen HT, Baudisch P (2015) Platener: Low-fidelity fabrication of 3D objects by substituting 3D print with laser-cut plates. In: Proceedings of the 33rd annual ACM conference on human factors in computing systems. ACM, pp 1799–1806
Ju W, Bonanni L, Fletcher R, Hurwitz R, Judd T, Post R, Reynolds M, Yoon J (2002) Origami Desk: integrating technological innovation and human-centric design. In: Proceedings of the 4th conference on Designing interactive systems: processes, practices, methods, and techniques. ACM, pp 399–405
Sterman Y, Demaine ED, Oxman N (2013) PCB origami: A material-based design approach to computer-aided foldable electronic devices. J Mech Des 135(11):114502
Kinoshita Y, Watanabe T (2008) Estimation of folding operation using silhouette of origami. IAENG J Comput Sci 37(2):1
Olberding S, Soto Ortega S, Hildebrandt K, Steimle J (2015) Foldio: digital fabrication of interactive and shape-changing objects with foldable printed electronics. In: Proceedings of the 28th Annual ACM Symposium on User Interface Software & Technology. ACM, pp 223–232
Deng D, Chen Y (2012) Design of origami sheets for foldable object fabrication. In: ASME 2012 International design engineering technical conferences and computers and information in engineering conference. American Society of Mechanical Engineers, pp 223–232
Deng D, Chen Y (2015) Origami-based self-folding structure design and fabrication using projection based stereolithography. J Mech Des 137(2):021701
Liu Y, Boyles JK, Genzer J, Dickey MD (2012) Self-folding of polymer sheets using local light absorption. Soft Matter 8(6):1764
DJ Balkcom, MT Mason (2004) Introducing robotic origami folding. In: 2004 IEEE international conference on, robotics and automation, 2004. Proceedings. ICRA’04, vol 4. IEEE, pp 3245–3250
Piqué A, Mathews S, Birnbaum A, Charipar N (2011) Microfabricating 3d structures by laser origami. Tech. rep. DTIC Document
Nisser M, Liao CC, Chai Y, Adhikari A, Hodges S, Mueller S (2021) LaserFactory: a laser cutter-based electromechanical assembly and fabrication platform to make functional devices & robots. In: Proceedings of the 2021 CHI Conference on human factors in computing systems, pp 1–15
Ko WH, Srinivasa A, Kumar P (2017) A multi-component automated laser-origami system for cyber-manufacturing. In: IOP Conference Series: Materials Science and Engineering, vol 272. IOP Publishing, p 012013
Baliga G, Graham S, Sha L, Kumar P (2004) Etherware: Domainware for wireless control networks. In: Seventh IEEE International symposium on object-oriented real-time distributed computing, 2004. Proceedings. IEEE, pp 155–162
Kim KD, Kumar P (2008) Architecture and mechanism design for real-time and fault-tolerant etherware for networked control. IFAC Proceedings 41(2):9421
Baliga G, Graham S, Sha L, Kumar P (2004) Service continuity in networked control using etherware. IEEE Distributed Systems Online 5(9):2
Lasersaur. http://www.lasersaur.com. Accessed: 2018-09-23
Wang Z, Iquebal AS, Bukkapatnam S (2018) A vision-based monitoring approach for real-time control of laser origami cybermanufacturing processes. Procedia Manufacturing 26:1307
Iquebal AS, Wang Z, Ko WH, Wang Z, Kumar P, Srinivasa A, Bukkapatnam S (2018) Towards realizing cybermanufacturing kiosks: quality assurance challenges and opportunities. Procedia Manufacturing 26:1296
Zhong Y, Wang Z, Yalamanchili AV, Yadav A, Srivatsa BR, Saripalli S, Bukkapatnam ST (2020) Image-based flight control of unmanned aerial vehicles (UAVs) for material handling in custom manufacturing. Journal of Manufacturing Systems 56:615
Funding
This research is supported by the National Science Foundation (NSF) (ECCS-1547075 and CNS-1646449), and Science & Technology Center Grant CCF-0939370.
Author information
Authors and Affiliations
Contributions
Zhujiang Wang: software, investigation, validation, writing—original draft, visualization, writing—review and editing, project administration. Zimo Wang: methodology, software, formal analysis, investigation, validation, writing—original draft, writing—review and editing, project administration. Woo-Hyun Ko: software, investigation, validation, writing—review and editing. Vu Nguyen: software. Ashif S. Iquebal: methodology. N.A. Kazerooni: investigation. Qiyang Ma: methodology, visualization, writing—review and editing. Satish T.S. Bukkapatnam: conceptualization, funding acquisition, supervision, resources. P.R. Kumar: conceptualization, funding acquisition, supervision, resources. Arun Srinivasa: conceptualization, funding acquisition, supervision, resources.
Corresponding author
Ethics declarations
Ethical approval
The authors claim that there are no ethical issues involved in this research.
Consent to participate
Not applicable. The article involves no studies on humans.
Consent for publication
Not applicable. The article involves no studies on humans.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wang, Z., Wang, Z., Ko, WH. et al. An autonomous laser kirigami method with low-cost real-time vision-based surface deformation feedback system. Int J Adv Manuf Technol 118, 1873–1883 (2022). https://doi.org/10.1007/s00170-021-07661-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-021-07661-8