
Abstract
In this paper, we discuss well-posedness of the boundary-value problems arising in some “gradient-incomplete” strain-gradient elasticity models, which appear in the study of homogenized models for a large class of metamaterials whose microstructures can be regarded as beam lattices constrained with internal pivots. We use the attribute “gradient-incomplete” strain-gradient elasticity for a model in which the considered strain energy density depends on displacements and only on some specific partial derivatives among those constituting displacements first and second gradients. So, unlike to the models of strain-gradient elasticity considered up-to-now, the strain energy density which we consider here is in a sense degenerated, since it does not contain the full set of second derivatives of the displacement field. Such mathematical problem was motivated by a recently introduced new class of metamaterials (whose microstructure is constituted by the so-called pantographic beam lattices) and by woven fabrics. Indeed, as from the physical point of view such materials are strongly anisotropic, it is not surprising that the mathematical models to be introduced must reflect such property also by considering an expression for deformation energy involving only some among the higher partial derivatives of displacement fields. As a consequence, the differential operators considered here, in the framework of introduced models, are neither elliptic nor strong elliptic as, in general, they belong to the class so-called hypoelliptic operators. Following (Eremeyev et al. in J Elast 132:175–196, 2018. https://doi.org/10.1007/s10659-017-9660-3) we present well-posedness results in the case of the boundary-value problems for small (linearized) spatial deformations of pantographic sheets, i.e., 2D continua, when deforming in 3D space. In order to prove the existence and uniqueness of weak solutions, we introduce a class of subsets of anisotropic Sobolev’s space defined as the energy space E relative to specifically assigned boundary conditions. As introduced by Sergey M. Nikolskii, an anisotropic Sobolev space consists of functions having different differential properties in different coordinate directions.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The strain-gradient theory of elasticity has its origin in the early works of some giants of continuum mechanics: see [1,2,3,4,5,6] for historical developments in the mechanics of generalized continua, and it was developed further in the original works by Toupin [7] and Mindlin [8, 9]. The main conceptual tool for formulating these theories is given by the principle of virtual work and/or the principle of least action: indeed also continuum mechanics finds its more effective formulation when one bases its postulation on variational principles. This opinion was also shared by Hellinger, see [10,11,12] who, in his masterpiece “Fundamentals of the mechanics of continua”, showed, already with the knowledge available in 1913, that the unifying vision given by variational principles could allow for a effective presentation of all field theories.
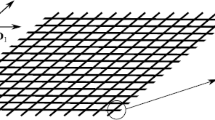
The strain-gradient elasticity found recently various applications to the modelling of behavior of various materials with complex inner microstructure. A particular class of such microstructured materials are metamaterials, see, e.g., [13, 14]. Among them let us mention fiber-reinforced composites and woven fabrics [15,16,17,18,19,20], fiber-reinforced composites with debonded fibers [21] and beam lattices [22,23,24,25], see also the report of two recent conferences [26, 27]. Example of beam lattice is given in Fig. 1, whereas a typical woven fabric is shown in Fig. 2. Unlike to the general framework of the strain-gradient elasticity given by Toupin–Mindlin, the model of pantographic beam lattices relates to a strain energy density which depends on functions having different differential properties in different spatial directions, see [22,23,24, 28]. We say that such a model belongs to reduced strain-gradient elasticity [29] and we claim that the theory of anisotropic Sobolev spaces [30] finds an interesting application in the study of pantographic structures.

3D printed specimen of a pantographic sheet

These structures have been introduced in order to give an example of metamaterial which can undergo very large deformations still remaining in an elastic regime. First preliminary experimental and theoretical results are presented in [16, 22, 33,34,35]. These papers show that the concept underlying the design of pantographic metamaterials deserved to be developed and therefore its mathematical modelling is needed, for getting detailed predictions via suitably developed numerical codes. Being said metamaterials constituted by lattices of beams, their numerical analysis may be inspired by discrete or semi-discrete models, see [36, 37], or by continuum models see, e.g., [38, 39]. Also metamaterials with granular structures can be developed by considering heuristically homogenized continuum models as presented in [40,41,42,43]. In order to perform effectively the numerical analysis of complex beam lattices, the most efficient methods are desired, (as those presented, e.g., in [44,45,46,47,48,49,50] and the references therein). Let us note that for polymer and metal materials when certain level of deformations is reached it could be important to take into account also inelastic phenomena [51,52,53,54,55]. Another source of inelastic behavior is the contact of the beams in the lattice and the related adhesion interactions [56, 57]. For current state of the pantographic metamaterials, we refer to [58,59,60,61,62,63]. Beam lattices can be used as “meso-models” of cellular solids or regular open-cell foams which are widely used in engineering and tissue engineering: we therefore believe that the homogenized models introduced in the present paper can have a wider range of application. Remark also that (see e.g., [63]) in pantographic metamaterials some “phase segregations” or “phase transitions” have been observed: therefore it seems natural to assume that the mathematical techniques used in [64,65,66] are applicable also in the present context. A generalized form of Pott model has been used to simulate static and kinetic phenomena in foams and the biological morphogenesis [67, 68]. Pantographic sheets modelling is closely related to mechanics of networks, see [69,70,71] and the reference therein.
It has also to be investigated the whole damage mechanisms occurring in them, with methods which may be inspired to peridynamics, see, e.g., [72,73,74,75,76]. The relationship between peridynamics and higher gradient continuum theories, on the other hand, was already know to Piola himself [77, 78], see also [79], and we believe that it deserves to be fully investigated.
The main object of this paper is to prove a result of well-posedness of the deformation problem of linear elastic pantographic sheets deforming in space: i.e., bidimensional continua generalizing standard plate models, as their deformation energy not only depend on the second gradient of out-of-plane displacement but also on second gradients of in-plane displacements. We believe that this is an essential intermediate step in the study of large deformation of pantographic metamaterials or of composite reinforcements, in particular when wrinkling occurs. The experimental evidence about these phenomena, occurring in the forming of composite reinforcements, is discussed in [80,81,82,83].
We believe that the insight gained by the results which we present here can supply a useful tool for developing the analysis of the more general nonlinear case. To this end, one may need more advanced techniques as used in the case of nonlinear theories of plates and shallow shells, see, e.g., [84,85,86,87].
2 Derivation of a continuum model
Let us consider a rectangular pantographic beam lattice, which consists of m vertical fibers of length \(l_2\) and n horizontal fibers of length \(l_1\) connected by short pivots of length h, see Fig. 3. In what follows, we describe infinitesimal deformations of the lattice using the Euler–Bernoulli beam model. First, we introduce two kinematically independent fields of translations and rotations and then using the standard kinematic Euler–Bernoulli constraints we will replace rotations by derivatives of translations.

Scheme of a pantographic lattice
Assuming a hyperelastic behavior for the fibers’ and pivots’ material, we get that the stored energy functional has the form
Here, \({\mathcal {U}}_1\) and \({\mathcal {U}}_2\) are the strain energy densities of fibers, whereas \({\mathcal {U}}_3\) is the strain energy of the pivots. With \(x_1\), \(x_2\), \(x_3\), and \({\mathbf {i}}_1\), \({\mathbf {i}}_2\), \({\mathbf {i}}_3\), we denote the Cartesian coordinates and the corresponding base vectors, see Fig. 3.
Introducing the translations \({\mathbf {u}}^{(\alpha )}=u^{(\alpha )}_1{\mathbf {i}}_1+u^{(\alpha )}_2{\mathbf {i}}_2 +u^{(\alpha )}_3{\mathbf {i}}_3\) and rotations \({\varvec{\phi }}^{(\alpha )}=\phi ^{(\alpha )}_1{\mathbf {i}}_1+\phi ^{(\alpha )}_2{\mathbf {i}}_2 +\phi ^{(\alpha )}_3{\mathbf {i}}_3\) vectors for the \(\alpha \)th family of fibers, \(\alpha =1,2\), we assume the general form of \({\mathcal {U}}_\alpha \)
Hereinafter, for brevity, we use the following notations for partial derivatives: \((\ldots )_{,i}=\frac{\partial }{\partial x_i}(\ldots )\), while \(\phi ^{(1)}_1\) and \(\phi ^{(2)}_2\) are the angles of torsion of first and second family of fibers, respectively, whereas other angles relate to the bending.
For simplicity, we consider a symmetric cross section of fibers (such as circular or square ones), so that the bending stiffness in the principal directions takes the same values. As a result, we get the following expressions for \({\mathcal {U}}_1\) and \({\mathcal {U}}_2\)
Here, \({\mathbb {K}}^{(\alpha )}_e\), \({\mathbb {K}}^{(\alpha )}_b\), and \({\mathbb {K}}^{(\alpha )}_t\) are the tangent, bending, and torsional stiffness parameters of the \(\alpha \)th family of beams, respectively. Formulae (3) and (4) present a simple form of energy of a Timoshenko-type shear-deformable beam taking into account its bending, stretching, and torsion. Remark that more general form of the strain energy for a beam under infinitesimal deformations is given in the literature, see, e.g., [88].
In what follows, we utilize the Bernoulli hypothesis. This leads to the standard relations between \({\mathbf {u}}^{(\alpha )}\) and \({\varvec{\phi }}^{(\alpha )}\), see, e.g., [88, 89],
As a result, \({\mathcal {U}}_1\) and \({\mathcal {U}}_2\) take the form
Note that here we have displacements \(u_{k}^{(\alpha )}\) and angles of torsion \(\phi _{2}^{(2)}\) and \(\phi _{1}^{(1)}\) as kinematical descriptors of the model.
Referring then to the deformation of the pivots interconnecting the fibers, or referring to the fiber interaction in the woven fabric, we must now describe the corresponding deformation energy. Using theoretical, numerical, and experimental results, it has been concluded that deformations of pantographic lattices cannot be described without considering pivots deformations [22, 90, 91]. It has to be remarked here that the deformation at microlevel of pivots induces a deformation of the pantographic sheet at macrolevel. Indeed, there are at least two length scales for considering pantographic sheets: a microlevel where each fiber and each pivot can be modelled as beams and a macrolevel where a homogenized continuum model is introduced generalizing Mindlin plate theory. The generalization consists in the introduction in the deformation strain energy of the second gradients of in-plane displacement components, see [18, 92]. Therefore, a correspondence relationship among microdeformations and macrodeformations needs to be specified: (i) micro-twist of a pivot results into an apparent macro-shear, (ii) micro-bending of a pivot results into relative twist of fibers and (iii) micro-elongation of a pivot results into relative displacement of fibers, which can be further distinguished into relative fibers slip and relative detachment of fibers. Thus, considering stretching, bending, and torsion of the pivots, we get the following efficient model by introducing the following strain energy density
where \({\mathbb {K}}^{(3)}_e\), \({\mathbb {K}}^{(3)}_b\), and \({\mathbb {K}}^{(3)}_t\) are the stiffness moduli of the pivots.
In order to present 2D model of the pantographic lattice deformations, let us replace the third term in Eq. (1) by an approximate value which depends only on the integrand values at \(x_3=0, h\). This approximation can be applied only in the case of relatively short pivots, and its applicability limits are investigated in [91]. First, we replace \(u_{3,3}^{(3)}\) by the finite difference
Hereinafter, we use the assumption on the continuity of displacements and rotations at the pivot fiber interface. In a similar way, we treat the derivatives of angles
where we replace the angles by the correspondent derivatives of displacements.
As a result, we get the approximated expression
The first term in (8) corresponds to a spring model. Indeed, it describes the energy of a vertical spring connecting beams. Other terms in (8) can be introduced considering rotational springs like in [22] describing pivot bending and twisting.
Being motivated by Fig. 2, we extend the model introducing horizontal springs of stiffness \({\mathbb {K}}^{(3)}_s/h\) with the energy
where \(u_{p\beta }^{(2)}\) and \(u_{p\beta }^{(1)}\) are the in-plane displacements of the upper and lower ends of the pivot. For the latter, there are formulae
where \(r_1\) and \(r_2\) are distances between the fiber cross section centers and ends of a pivot.
Thus, we can replace (1) with a semi-discrete energy given by the functional
where \((x_{1i},x_{2j})\) are the coordinates of nodes, each one corresponding to a pivot. From the variational equation \(\delta {\mathcal {E}}=0\), it follows a system of linear ordinary differential equations with respect to \({\mathbf {u}}^{(1)}(x_1)\) and \({\mathbf {u}}^{(2)}(x_2)\), \(\phi _1^{(1)}(x_1)\), and \(\phi _2^{(2)}(x_2)\).
Instead of the discrete model with the energy functional (9), we introduce equivalent continuum model assuming that \( {\mathbf {u}}^{(1)}\) and \( {\mathbf {u}}^{(2)}\), \(\phi _1^{(1)} \), and \(\phi _2^{(2)} \) are functions which depend on \(x_1\) and \(x_2\):
This assumption for averaging a la Piola was used in [22, 23, 77, 78]. The continuous counterpart of (9) takes the form
where with an abuse of notation we keep the same notations for the semi-discrete and continuum stiffness parameters. Remark that continuum stiffness parameters are related to continuum ones by using the ratios \(m/l_1\) and \(n/l_2\).
In order to describe the behavior of the lattice as a whole and the detachment of fibers, we introduce mean and relative displacements as follows
Here, \({\mathbf {u}}\) can be interpreted as the displacements of the midsurface of the lattice, whereas \({\mathbf {v}}\) describes the relative deformations that is the difference between displacements of the fibers. As a result, we have \({\mathbf {u}}^{(1)}={\mathbf {u}}-{\mathbf {v}}\), \( {\mathbf {u}}^{(2)}={\mathbf {u}}+{\mathbf {v}}\), \({\varvec{\phi }}=\phi _1{\mathbf {i}}_1+\phi _2{\mathbf {i}}_2\), and \({\mathcal {E}}\) takes the form
In what follows, we analyze the properties of the differential equations which are the Euler–Lagrange stationarity conditions for given energy and their weak solutions.
3 Strain energy density and equilibrium conditions
An important element of the analysis of existence and uniqueness of weak solutions is the study of the energy null-space, that is, set of admissible functions for which the given strain energy density is vanishing. For standard linear elasticity, such null-space reduces to the so-called infinitesimal rigid body motions, see [93,94,95]. For linear pantographic sheets considered within reduced strain-gradient elasticity, there are other possible energy-free solutions [28].
3.1 Energy-free deformations and rigid body motions: full model
Let us find all smooth solutions of \({\mathcal {W}}=0\), that is, the set of energy-free deformations. As \({\mathbb {K}}^{(1)}_t\) and \({\mathbb {K}}^{(2)}_t\) are positive, we get that \(\phi _{1,1}=\phi _{2,2}=0\) which result in
From \({\mathbb {K}}^{(3)}_e>0\), we have \(v_3=0\). From \({\mathbb {K}}^{(3)}_s>0\), it follows that
and \({\mathcal {W}}\) takes the form
From \({\mathcal {W}}=0\), we get the following system of differential equations
From (16), we get that \(u_3=a_{11}x_1x_2+a_{10}x_1+a_{01}x_2+u_3^{(0)}\). This function corresponds to a hyperbolic paraboloid which is an example of doubly ruled surface. From (13) and (17), we have that \(a_{11}=0\), \(\phi _1=a_{01}\), and \(\phi _2=-a_{10}\). From (14), it follows that \(v_1=-r_2 a_{10}\) and \(v_2=r_1 a_{01}\). So, in the null-space displacements for deformation energy, the relative in-plane displacements are constants.
From (18), we have \(u_1=f_1x_2+u_1^{(0)},\)\( u_2=f_2x_1 + u_2^{(0)}.\) Hereinafter, \(a_{11}\), \(a_{10}\), \(a_{01}\), \(f_1\), \(f_2\), and \(u_i^{{0}}\) are constants. In addition, from (19) it follows that \(f_2=-f_1\) and \(u_2=-f_1x_1 + u_2^{(0)}\). As a result, we get six linearly independent energy-free deformations given by
In standard linear elasticity, energy-free deformations coincide with the infinitesimal rigid body motions. In all 2D generalized plate considered here models the infinitesimal rigid motions must be included in the energy null-space even if, in general, they do not coincide with it. So in order to recognize this property starting from (20)–(24), let us recall that the infinitesimal deformations related to the rigid body motions take the form
where \({\mathbf {u}}^{(0)}=u_k^{(0)}{\mathbf {i}}_k\) and \({\varvec{\omega }}=\omega _k{\mathbf {i}}_k\) are constant vectors, and \({\mathbf {x}}=x_k{\mathbf {i}}_k\). In scalar form, these deformations can be written as follows
Obviously, \({\mathcal {W}}\) is invariant under transformations \({\mathbf {u}}\rightarrow {\mathbf {u}}+{\mathbf {u}}^{(r)}\). The analysis of energy-free solutions within the linear Kirchhoff theory of plates [96, p. 271] brings the following solution
which coincides with (20)–(22). In other words, the displacement part of the elements of the null-space for strain energy of pantographic sheets is a finite dimensional vector space and it is the same as in the standard theory of plates.
Analyzing in-plane deformations of linear pantographic sheets, we demonstrated [28] the importance of shear energy of pivots to avoid additional energy-free shear deformations. To consider both in- and out-of-plane deformations, let us also underline the importance of the bending energies of pivots.
3.2 Energy-free deformations: pivot spring model
Let us remark that, when assuming
the elements of energy null-space have a non-vanishing \(u_3\) including the addend \(a_{11}x_1x_2\) and rotations having the form (13). Indeed, if we consider a spring model for pivots which is considering only stretching, the corresponding strain energy takes the form
Considering equation \({\mathcal {W}}_0=0\), we obtain the following energy-free solution
Thus, the null-space for the energy is even not finite dimensional and has the previously stated structure.
3.3 Energy-free deformations: fibers without torsional energy and pivots without bending energy
Assuming that torsional deformations of fibers and bending energy of pivots are vanishing, that is when
we derive the following strain energy
whose finite dimensional null-space consists of the functions
3.4 Energy-free deformations: perfectly connected fibers without torsion energy and pivots without bending energy
Finally, if one in addition to (31) assumes that
the relative deformations are vanishing. In this case, the strain energy function has the simplest form
The null-space for \({\mathcal {W}}_{000}\) consists of functions given by (34).
3.5 Equilibrium equations
In order to derive the corresponding equilibrium equations and to establish possible applicable external actions, we calculate the first variation of the functional
where \(\omega \subset {I\!\!R}^2\) is a bounded area with smooth enough boundary. The first variation of \({\mathcal {E}}\) reads
where
The consistent form of the work of external surface loads acting on the pantographic sheet is given by
where \(b_i\), \(i=1,2,3\), are the surface external forces, \(g_i\) are external double forces, see [97], and \(m_\alpha \) are external torques, respectively.
From the variational equation,
we get the following equilibrium equations
This coupled system of PDEs contains differential operators of different order, so the unknown functions have partial derivatives of different order depending on the direction. This means that the system is not elliptic, in general, see [98,99,100]. To underline the peculiarities of corresponding differential operators, let us consider the simplest case (36). Now, the corresponding equilibrium equations have the following decoupled form
For example, here \(u_1(x_1,x_2)\) possesses second derivatives with respect to \(x_1\) and fourth derivatives with respect to \(x_2\). Introducing differential operators \(P_{ij}\) as follows
where \(\partial _\alpha =\frac{\partial }{\partial x_\alpha }\), we rewrite (49)–(51) in the symbolic form
Operators \(P_{11}\) and \(P_{22}\) are neither elliptic nor strongly elliptic, but they belong to the class of hypoelliptic differential equations [101, 102]. The existence and uniqueness of weak solutions for (49)–(50) was analyzed in [28]. Operator \(P_{33}\) is strongly elliptic.
4 Existence and uniqueness of weak solutions
For the proof of the existence and uniqueness of weak solutions, we use the same technique as in [28] which uses the anisotropic Sobolev’s spaces as the corresponding energy space for considered functionals. These functional spaces were introduced in [30, 103,104,105], see also [106]. They are generalizations of the Sobolev’s spaces [107, 108]. In what follows, we are restricted ourselves by the functionals which have a finite dimensional null-space and non-singular boundary conditions [28]. Our non-singular boundary conditions are nothing else as the Shapiro–Lopatinskii or complementary boundary conditions, see original works [109, 110] and [100, 108, 111, 112] for the mathematical definitions. For example, for strongly elliptic PDEs the Dirichlet- and von Neumann-type boundary conditions satisfy the Shapiro–Lopatinskii conditions.
Without loss of generality, we consider the problems in the dimensionless forms. We start from the simplest case.
4.1 Weak solutions for \( {\mathcal {W}}_{000}\)
We introduce the following bilinear form
and the linear functional
Obviously, if one uses the substitution \(\mathbf w=\delta \mathbf u\) the bilinear form \(B_{000}\) coincides with the first variation of \({\mathcal {E}}\), whereas \(L_{000}\mathbf w\) is the dimensionless work of external loads.
The quadratic functional \(B_{000}(\mathbf u;\mathbf u)\) has all properties of a squared seminorm, but it is not a norm as the norm requirement
is violated. Indeed, \(B_{000}(\mathbf u;\mathbf u)=0\) results in nontrivial solutions (34).
Let us consider the homogenous boundary conditions
It is easy to show that in this case from \(B_{000}(\mathbf u;\mathbf u)=0\) it follows that \(\mathbf u=\mathbf 0\). Thus, \(B_{000}(\mathbf u;\mathbf u)\) becomes a norm on a set of functions satisfying (53). We assume the natural boundary conditions followed from (40) as other boundary conditions.
We introduce the energy space \(E^{000}_0\) as completion in the norm
of \(C_2(\omega )\) functions which verify (53). The energy space \(E^{000}_0\) can be characterized through the anisotropic Sobolev’s spaces as follows
Thus, \(E^{000}_0= {\mathop {W}\limits ^{\circ }}\!{_{2}^{(1,2)}}(\omega )\oplus {\mathop {W}\limits ^{\circ }}\!{_{2}^{(2,1)}}(\omega )\oplus {\mathop {W}\limits ^{\circ }}\!_2^{2}(\omega )\). As \(B_{000}(\mathbf u;\mathbf u)\) constitutes the squared norm in \(E^{000}_0\), it is obvious that \(B_{000} \) is coercive.
Let us recall that the anisotropic Sobolev’s spaces contain functions which have different differential properties. For example, for \(\omega \in \mathrm {{I\!R}}^2\), the norms in the spaces \({\mathop {W}\limits ^{\circ }}\!{_{2}^{(1,2)}}(\omega )\), \({\mathop {W}\limits ^{\circ }}\!{_{2}^{(2,1)}}(\omega )\), \( {W}\!{_{2}^{(1,2)}}(\omega )\), and \( {W}\!{_{2}^{(2,1)}}(\omega )\) coincide each other and are given by the formulae
Definition 1
We call \(\mathbf u\in E^{000}_0\) a weak solution of the equilibrium equations (49)–(51), if the equation
is fulfilled for any test function \(\mathbf w\) from a dense set in \(E^{000}_0\).
Using standard Riesz representation theorem and the Lax-Milgram theorem arguments [93,94,95, 113], we can prove the following
Theorem 1
Let \(b_{1}\), \(b_{2}\), and \(b_{3}\) belong to the space \(L_{2}(\omega )\). There exists a weak solution \(\mathbf {u}^{*}\in E^{000}_0\) to the corresponding equilibrium problem (49)–(51), which for any \(\mathbf {w}\in E^{000}_0\) satisfies (56)
Furthermore, \(\mathbf {u}^{*}\) is unique and it is a minimizer of the energy functional:
Let us note that since (49)–(51) are decoupled the problem can be splitted into two independent problems for (49), (50) and for (51). This gives the possibility to consider these problems independently, that is independently for \(u_1\) and \(u_2\) and for \(u_3\). The boundary-value problems for (49), (50) are studied in [28] in details. Some solution of (51) is presented in [114, p. 1014]. Let us also note that for mixed boundary conditions we have non-unique solutions of (51). For example, let us consider a rectangle such shown in Fig. 4 (on the left) where a half of its boundary fixed, that is \(u_3=0\), whereas other part is free. As the natural boundary conditions for \({\mathcal {W}}_{000}\) includes second and third derivatives, it is clear that for \(b_3=0\) there are two solutions. They are
for any number \(a_{11}\).

Examples of singular boundary conditions for (51) with non-unique solutions
Another example with smooth boundary can be obtained as follows. As the equation
constitutes an equations of a hyperbola, let us consider an area which boundary includes a part of hyperbola, Fig. 4 (on the right). On this part, we again assume that \(u_3=0\) and other boundary conditions are natural ones. Here, we also have two solutions that are trivial one \(u_3=0\) and nonzero solution
with any number c. This solution belongs to the energy null-space, see (34).
These examples show that the consideration of out-of-plane deformations may lead to non-unique solutions. Indeed, for in-plane deformations of pantographic sheets given in Fig. 4, the solution of (49) and (50) is unique [28], whereas for out-of-plane deformations we have many solutions.
4.2 Weak solutions for \( {\mathcal {W}}_{00}\)
In a similar way, we introduce the following dimensionless bilinear form and the linear functional
We again consider the clamped boundary that is with the following boundary conditions
For these boundary conditions, \(B_{00}(\mathbf u,\mathbf v;\mathbf u,\mathbf v)\) is a squared norm in some energy space \(E_0^{00}\) which follows from the completion of continuously differentiable functions in this norm,
So, \(B_{00}\) becomes the coercive in \(E_0^{00}\) and similar theorems on the uniqueness and existence as above can be formulated.
4.3 Remarks on other cases
Unlike two previous case, this technique cannot be applied straightforwardly to the pivot spring model introduced by (30). Indeed, for this model, the corresponding null-space is not finite dimensional. And vice versa, the full model with the strain energy density (12) can be analyzed similarly to these cases as its null-space is finite dimensional. So, energy-null solutions can be avoided choosing proper boundary conditions.
Let us also underline the crucial difference between the semi-discrete model (9) and its continual counterparts. The semi-discrete model corresponds to a system of linear ODEs. So its well-posedness is rather obvious. On the other hand, the continual “homogenized” models may loose this property. So, one should be aware of such situations.
5 Conclusions and future steps
In this paper, we formulate a linear elastic model for pantographic sheets which has the following features:
-
1.
The placements of the two involved families of fibers are independent fields both defined in a bidimensional Lagrangian reference configuration and having images in the 3D Eulerian Euclidean affine space of positions;
-
2.
Both families of fibers are modelled as beams which can store deformation energy due to elongation, bending and twisting;
-
3.
The pivots between the fibers are assumed to be connected with two sections belonging to two different fibers (see Fig. 3), and these sections are assumed to behave as rigid bodies;
-
4.
The strain energy of these pivots depends on the relative displacement and rotations of the aforementioned fibers’ sections.
We are aware of the fact that the listed assumptions do limit the range of applicability of the proposed model. In particular, when the forming process of composite reinforcements has to be described the assumption of small displacements and deformations cannot be accepted. Also, the friction phenomena among fibers have to be included in the model. However, we consider the presented model as an improvement of those already considered in the literature, see [18, 28, 92] and the reference therein, as the process of pivot deformation or inter-fiber elastic interaction has not been taken suitably into account. Moreover, see [115], recently some attention has been paid to the vibration phenomena of pantographic specimens and the experimental evidence which has been obtained indicates that a linear elastic dynamical model can be very useful in applications. Therefore, the first development which we will address of the results presented in this paper will surely include the discussion of:
-
1.
The most suitable inertial terms to be added in the Lagrangian for considered systems;
-
2.
The properties of obtained dispersion formulas;
-
3.
The properties of eigenfrequencies and modal forms of finite pantographic specimens suitably constrained and excited.
Another result which we present in this paper concerns the study of well-posedness of the equilibrium problem for the considered pantographic sheet. The mathematical problems to be faced are not as simple as one should have expected. The standard Sobolev space setting is not suitable to frame in a satisfactory way. Instead, anisotropic Sobolev spaces are needed and a careful study of the null-space of the postulated deformation energy plays a crucial role in some instances of pantographic sheets where some stiffnesses are vanishing. The null-space of some kinds of sheets may include finite or even infinite dimensional spaces of displacements which strictly include rigid motions. The elements of these null-space have been sometimes called "floppy modes." The boundary conditions to be imposed to assure well-posedness of equilibrium problems must, in these singular cases, assure that all possible floppy modes are not allowed.
Let us note that here we restricted ourselves to infinitesimal deformations. On the other hand, high flexibility of considered beam lattice structures results in necessity to analyze existence and uniqueness/non-uniqueness of the corresponding nonlinear boundary-value problems. Unlike classic plates and shallow shells [84,85,86,87], where deflections are larger than in-plane displacements, in general, for a beam lattice in-plane displacements may have the same order of magnitude as out-of-plane ones. So, one can expect an essential nonlinearity of the corresponding boundary-value problems.
We expect that the presented mathematical analysis, which shows that the treatment presented in [28] can be extended to sheets deforming in 3D space, will guide us to treat the more complicated problems to be faced when considering pantographic sheets undergoing large deformations, see, e.g., [18, 22, 92]. In other words, we believe that for any linear or nonlinear physical model its linear mathematical counterpart that is a linear boundary-value problem with suitable boundary conditions, such as fixed boundary conditions, should have unique solution. Otherwise, this results not only in some pathological mathematical properties, but also in essential difficulties in numerical calculations.
This conclusion may be also useful for the mathematical analysis of other enhanced models of continua and structures, as for example polar, dipolar, non-local media and continue with additional kinematical descriptors [95, 116,117,118,119,120], where the enhanced kinematics may result in unusual floppy modes and corresponding constraints to external loading.
References
Maugin, G.A.: A historical perspective of generalized continuum mechanics. In: Altenbach, H., Erofeev, V.I., Maugin, G.A. (eds.) Mechanics of Generalized Continua. From the Micromechanical Basics to Engineering Applications, pp. 3–19. Springer, Berlin (2011)
Maugin, G.A.: Generalized continuum mechanics: various paths. In: Continuum Mechanics Through the Twentieth Century: A Concise Historical Perspective, Springer, Dordrecht, pp. 223–241 (2013)
Maugin, G.A.: Non-classical Continuum Mechanics: A Dictionary. Springer, Singapore (2017)
dell’Isola, F., Della Corte, A., Giorgio, I.: Higher-gradient continua: the legacy of Piola, Mindlin, Sedov and Toupin and some future research perspectives. Math. Mech. Solids 22(4), 852–872 (2017)
Auffray, N., dell’Isola, F., Eremeyev, V.A., Madeo, A., Rosi, G.: Analytical continuum mechanics à la Hamilton–Piola least action principle for second gradient continua and capillary fluids. Math. Mech. Solids 20(4), 375–417 (2015)
dell’Isola, F., Eremeyev, V.A.: Some introductory and historical remarks on mechanics of microstructured materials. In: dell’Isola, F., Eremeyev, V.A., Porubov, A. (eds.) Advances in Mechanics of Microstructured Media and Structures, pp. 1–20. Springer, Cham (2018)
Toupin, R.A.: Elastic materials with couple-stresses. Arch. Ration. Mech. Anal. 11(1), 385–414 (1962)
Mindlin, R.D.: Micro-structure in linear elasticity. Arch. Ration. Mech. Anal. 16(1), 51–78 (1964)
Mindlin, R.D., Eshel, N.N.: On first strain-gradient theories in linear elasticity. Int. J. Solids Struct. 4(1), 109–124 (1968)
Eugster, S.R., dell’Isola, F.: Exegesis of the introduction and sect. I from “Fundamentals of the Mechanics of Continua”** by E. Hellinger. ZAMM 97(4), 477–506 (2017)
Eugster, S.R., dell’Isola, F.: Exegesis of Sect. II and III.A from “Fundamentals of the Mechanics of Continua” by E. Hellinger. ZAMM 98(1), 31–68 (2018)
Eugster, S.R., dell’Isola, F.: Exegesis of Sect. III.B from “Fundamentals of the Mechanics of Continua” by E. Hellinger. ZAMM 98(1), 69–105 (2018)
Barchiesi, E., Spagnuolo, M., Placidi, L.: Mechanical metamaterials: a state of the art. Math. Mech. Solids 24(1), 212–234 (2019)
di Cosmo, F., Laudato, M., Spagnuolo, M.: Acoustic metamaterials based on local resonances: homogenization, optimization and applications. In: Generalized Models and Non-classical Approaches in Complex Materials 1, pp. 247–274. Springer, New York (2018)
Soubestre, J., Boutin, C.: Non-local dynamic behavior of linear fiber reinforced materials. Mech. Mater. 55, 16–32 (2012)
Turco, E., dell’Isola, F., Cazzani, A., Rizzi, N.L.: Hencky-type discrete model for pantographic structures: numerical comparison with second gradient continuum models. ZAMP 67(4), 1–28 (2016)
Boisse, P., Colmars, J., Hamila, N., Naouar, N., Steer, Q.: Bending and wrinkling of composite fiber preforms and prepregs. A review and new developments in the draping simulations. Compos. Part B: Eng. 141, 234–249 (2018)
dell’Isola, F., Steigmann, D.: A two-dimensional gradient-elasticity theory for woven fabrics. J. Elast. 118(1), 113–125 (2015)
dell’Isola, F., Steigmann, D., Della Corte, A.: Synthesis of fibrous complex structures: designing microstructure to deliver targeted macroscale response. Appl. Mech. Rev 67(6), 060804-1–21 (2016)
Sabik, A.: Direct shear stress vs strain relation for fiber reinforced composites. Compos. Part B: Eng. 139, 24–30 (2018)
Berrehili, Y., Marigo, J.-J.: The homogenized behavior of unidirectional fiber-reinforced composite materials in the case of debonded fibers. Math. Mech. Complex Syst. 2(2), 181–207 (2014)
dell’Isola, F., Giorgio, I., Pawlikowski, M., Rizzi, N.: Large deformations of planar extensible beams and pantographic lattices: heuristic homogenisation, experimental and numerical examples of equilibrium. Proc. R. Soc. Lond. Ser. A 472(2185), 20150790 (2016)
Boutin, C., dell’Isola, F., Giorgio, I., Placidi, L.: Linear pantographic sheets: asymptotic micro–macro models identification. Math. Mech. Complex Syst. 5(2), 127–162 (2017)
Turco, E., Golaszewski, M., Giorgio, I., D’Annibale, F.: Pantographic lattices with non-orthogonal fibres: experiments and their numerical simulations. Compos. Part B: Eng. 118, 1–14 (2017)
Rahali, Y., Giorgio, I., Ganghoffer, J.F., dell’Isola, F.: Homogenization à la Piola produces second gradient continuum models for linear pantographic lattices. Int. J. Eng. Sci. 97, 148–172 (2015)
Misra, A., Placidi, L., Scerrato, D.: A review of presentations and discussions of the workshop Computational mechanics of generalized continua and applications to materials with microstructure that was held in Catania 29–31 October 2015. Math. Mech. Solids 22(9), 1891–1904 (2017)
Placidi, L., Giorgio, I., Della Corte, A., Scerrato, D.: Euromech 563 Cisterna di Latina 17–21 March 2014 Generalized continua and their applications to the design of composites and metamaterials: a review of presentations and discussions. Math. Mech. Solids 22(2), 144–157 (2017)
Eremeyev, V.A., dell’Isola, F., Boutin, C., Steigmann, D.: Linear pantographic sheets: existence and uniqueness of weak solutions. J. Elast. 132, 175–196 (2018). https://doi.org/10.1007/s10659-017-9660-3
Eremeyev, V.A., dell’Isola, F.: A note on reduced strain gradient elasticity. In: Altenbach, H., Pouget, J., Rousseau, M., Collet, B., Michelitsch, T. (eds.) Generalized Models and Non-classical Approaches in Complex Materials 1, pp. 301–310. Springer, Cham (2018)
Nikol’skii, S.M.: On imbedding, continuation and approximation theorems for differentiable functions of several variables. Russian Math. Surv. 16(5), 55 (1961)
Kachala, V.V., Khemchyan, L.L., Kashin, A.S., Orlov, N.V., Grachev, A.A., Zalesskiy, S.S., Ananikov, V.P.: Target-oriented analysis of gaseous, liquid and solid chemical systems by mass spectrometry, nuclear magnetic resonance spectroscopy and electron microscopy. Russian Chem. Rev. 82(7), 648–85 (2013)
Kashin, A.S., Ananikov, V.P.: A SEM study of nanosized metal films and metal nanoparticles obtained by magnetron sputtering. Russian Chem, Bull. 60(12), 2602–2607 (2011)
Alibert, J.-J., Seppecher, P., dell’Isola, F.: Truss modular beams with deformation energy depending on higher displacement gradients. Math. Mech. Solids 8(1), 51–73 (2003)
Seppecher, P., Alibert, J.-J., dell’Isola, F.: Linear elastic trusses leading to continua with exotic mechanical interactions. J. Phys. Conf. Ser. 319(1), 012018 (2011)
Turco, E., Golaszewski, M., Cazzani, A., Rizzi, N.L.: Large deformations induced in planar pantographic sheets by loads applied on fibers: experimental validation of a discrete Lagrangian model. Mech. Res. Commun. 76, 51–56 (2016)
Eugster, S.R., Hesch, C., Betsch, P., Glocker, C.: Director-based beam finite elements relying on the geometrically exact beam theory formulated in skew coordinates. Int. J. Numer. Methods Eng. 97(2), 111–129 (2014)
Andreaus, U., Spagnuolo, M., Lekszycki, T., Eugster, S.R.: A Ritz approach for the static analysis of planar pantographic structures modeled with nonlinear Euler–Bernoulli beams. Contin. Mech. Thermodyn. 30, 1103–1123 (2018)
Placidi, L., Andreaus, U., Giorgio, I.: Identification of two-dimensional pantographic structure via a linear D4 orthotropic second gradient elastic model. J. Eng. Math. 103(1), 1–21 (2017)
Giorgio, I.: Numerical identification procedure between a micro-Cauchy model and a macro-second gradient model for planar pantographic structures. Zeitschrift für angewandte Mathematik und Physik 67(4), 95 (2016)
Misra, A., Poorsolhjouy, P.: Granular micromechanics based micromorphic model predicts frequency band gaps. Contin. Mech. Thermodyn. 28(1–2), 215–234 (2016)
Misra, A., Poorsolhjouy, P.: Identification of higher-order elastic constants for grain assemblies based upon granular micromechanics. Math. Mech. Complex Syst. 3(3), 285–308 (2015)
Misra, A., Poorsolhjouy, P.: Grain-and macro-scale kinematics for granular micromechanics based small deformation micromorphic continuum model. Mech. Res. Commun. 81, 1–6 (2017)
Misra, A., Poorsolhjouy, P.: Elastic behavior of 2D grain packing modeled as micromorphic media based on granular micromechanics. J. Eng. Mech. 143(1), C4016005 (2016)
Chróścielewski, J., Sabik, A., Sobczyk, B., Witkowski, W.: Nonlinear FEM 2D failure onset prediction of composite shells based on 6-parameter shell theory. Thin-Walled Struct. 105, 207–219 (2016)
Balobanov, V., Niiranen, J.: Locking-free variational formulations and isogeometric analysis for the Timoshenko beam models of strain gradient and classical elasticity. Comput. Methods Appl. Mech. Eng. 339, 137–159 (2018)
Niiranen, J., Balobanov, V., Kiendl, J., Hosseini, S.B.: Variational formulations, model comparisons and numerical methods for Euler–Bernoulli micro-and nano-beam models. Math. Mech. Solids 24(1), 312–335 (2019)
Greco, L., Cuomo, M., Contrafatto, L., Gazzo, S.: An efficient blended mixed B-spline formulation for removing membrane locking in plane curved Kirchhoff rods. Comput. Methods Appl. Mech. Eng. 324, 476–511 (2017)
Chróścielewski, J., Schmidt, R., Eremeyev, V.A.: Nonlinear finite element modeling of vibration control of plane rod-type structural members with integrated piezoelectric patches. Contin. Mech. Thermodyn. 31(1), 147–188 (2019)
Chróścielewski, J., Sabik, A., Sobczyk, B., Witkowski, W.: 2-D constitutive equations for orthotropic Cosserat type laminated shells in finite element analysis. Compos. Part B: Eng. 165, 335–353 (2019)
Maurin, F., Greco, F., Desmet, W.: Isogeometric analysis for nonlinear planar pantographic lattice: discrete and continuum models. Contin. Mech. Thermodyn. 31(4), 1051–1064 (2019)
Alfano, G., De Angelis, F., Rosati, L.: General solution procedures in elasto/viscoplasticity. Comput. Methods Appl. Mech. Eng. 190(39), 5123–5147 (2001)
Palazzo, V., Rosati, L., Valoroso, N.: Solution procedures for \(j_3\) plasticity and viscoplasticity. Comput. Methods Appl. Mech. Eng. 191(8–10), 903–939 (2001)
Placidi, L., Barchiesi, E., Misra, A.: A strain gradient variational approach to damage: a comparison with damage gradient models and numerical results. Math. Mech. Complex Syst. 6(2), 77–100 (2018)
Placidi, L., Barchiesi, E.: Energy approach to brittle fracture in strain-gradient modelling. Proc. R. Soc. A 474(2210), 20170878 (2018)
Placidi, L., Misra, A., Barchiesi, E.: Two-dimensional strain gradient damage modeling: a variational approach. Zeitschrift für angewandte Mathematik und Physik 69(3), 56 (2018)
Marmo, F., Toraldo, F., Rosati, A., Rosati, L.: Numerical solution of smooth and rough contact problems. Meccanica 53(6), 1415–1440 (2018)
Nadler, B., Steigmann, D.J.: A model for frictional slip in woven fabrics. Comptes Rendus Mecanique 331(12), 797–804 (2003)
Golaszewski, M., Grygoruk, R., Giorgio, I., Laudato, M., Di Cosmo, F.: Metamaterials with relative displacements in their microstructure: technological challenges in 3D printing, experiments and numerical predictions. Contin. Mech. Thermodyn. 31, 1015–1034 (2019)
Barchiesi, E., Ganzosch, G., Liebold, C., Placidi, L., Grygoruk, R., Müller, W.H.: Out-of-plane buckling of pantographic fabrics in displacement-controlled shear tests: experimental results and model validation. Contin. Mech. Thermodyn. 31(1), 33–45 (2019)
Barchiesi, E., Placidi, L.: A review on models for the 3D statics and 2D dynamics of pantographic fabrics. In: Wave Dynamics and Composite Mechanics for Microstructured Materials and Metamaterials, pp. 239–258. Springer, Berlin (2017)
Turco, E., Misra, A., Sarikaya, R., Lekszycki, T.: Quantitative analysis of deformation mechanisms in pantographic substructures: experiments and modeling. Contin. Mech. Thermodyn. 31(1), 209–223 (2019)
Misra, A., Lekszycki, T., Giorgio, I., Ganzosch, G., Müller, W.H., dell’Isola, F.: Pantographic metamaterials show atypical Poynting effect reversal. Mech. Res. Commun. 89, 6–10 (2018)
dell’Isola, F., Seppecher, P., Alibert, J.J., Lekszycki, T., Grygoruk, R., Pawlikowski, M., Steigmann, D., Giorgio, I., Andreaus, U., Turco, E., Gołaszewski, M., Rizzi, N., Boutin, C., Eremeyev, V.A., Misra, A., Placidi, L., Barchiesi, E., Greco, L., Cuomo, M., Cazzani, A., Corte, A.D., Battista, A., Scerrato, D., Eremeeva, I.Z., Rahali, Y., Ganghoffer, J.-F., Müller, W., Ganzosch, G., Spagnuolo, M., Pfaff, A., Barcz, K., Hoschke, K., Neggers, J., Hild, F.: Pantographic metamaterials: an example of mathematically driven design and of its technological challenges. Contin. Mech. Thermodyn. 31(4), 851–884 (2019)
Carlen, E.A., Carvalho, M.C., Esposito, R., Lebowitz, J.L., Marra, R.: Droplet minimizers for the Gates–Lebowitz–Penrose free energy functional. Nonlinearity 22(12), 2919–2952 (2009)
Eremeyev, V.A., Pietraszkiewicz, W.: The non-linear theory of elastic shells with phase transitions. J. Elast. 74(1), 67–86 (2004)
Pietraszkiewicz, W., Eremeyev, V.A., Konopińska, V.: Extended non-linear relations of elastic shells undergoing phase transitions. J. Appl. Math. Mech.-ZAMM 87(2), 150–159 (2007)
De Masi, A., Merola, I., Presutti, E., Vignaud, Y.: Potts models in the continuum. Uniqueness and exponential decay in the restricted ensembles. J. Stat. Phys. 133(2), 281–345 (2008)
De Masi, A., Merola, I., Presutti, E., Vignaud, Y.: Coexistence of ordered and disordered phases in Potts models in the continuum. J. Stat. Phys. 134(2), 243–306 (2009)
Atai, A.A., Steigmann, D.J.: On the nonlinear mechanics of discrete networks. Arch. Appl. Mech. 67(5), 303–319 (1997)
Luo, C., Steigmann, D.J.: Bending and twisting effects in the three-dimensional finite deformations of an inextensible network. In: Advances in the Mechanics of Plates and Shells, pp. 213–228. Springer, Berlin (2001)
Steigmann, D.J.: Continuum theory for elastic sheets formed by inextensible crossed elasticae. Int. J. Non-Linear Mech. 106, 324–329 (2018)
Gao, Y., Oterkus, S.: Ordinary state-based peridynamic modelling for fully coupled thermoelastic problems. Contin. Mech. Thermodyn. 31, 907–937 (2019)
Oterkus, E., Madenci, E.: Peridynamic analysis of fiber-reinforced composite materials. J. Mech. Mater. Struct. 7(1), 45–84 (2012)
Oterkus, E., Madenci, E.: Peridynamic theory for damage initiation and growth in composite laminate. Key Eng. Mater. 488, 355–358 (2012)
Diyaroglu, C., Oterkus, E., Oterkus, S., Madenci, E.: Peridynamics for bending of beams and plates with transverse shear deformation. Int. J. Solids Struct. 69, 152–168 (2015)
Diyaroglu, C., Oterkus, E., Oterkus, S.: An Euler–Bernoulli beam formulation in an ordinary state-based peridynamic framework. Math. Mech. Solids (2017). https://doi.org/10.1177/1081286517728424
dell’Isola, F., Maier, G., Perego, U., Andreaus, U., Esposito, R., Forest, S. (Eds.): The complete works of Gabrio Piola: Volume I, vol. 38 of Advanced Structured Materials, Springer, Cham (2014)
dell’Isola, F., Maier, G., Perego, U., Andreaus, U., Esposito, R., Forest, S. (Eds.), The complete works of Gabrio Piola: Volume II, vol. 97 of Advanced Structured Materials, Springer, Cham (2018)
dell’Isola, F., Andreaus, U., Placidi, L.: At the origins and in the vanguard of peridynamics, non-local and higher-gradient continuum mechanics: an underestimated and still topical contribution of Gabrio Piola. Math. Mech. Solids 20(8), 887–928 (2015)
Giorgio, I., Harrison, P., dell’Isola, F., Alsayednoor, J., Turco, E.: Wrinkling in engineering fabrics: a comparison between two different comprehensive modelling approaches. Proc. R. Soc. A 474(2216), 20180063 (2018)
Boisse, P., Hamila, N., Vidal-Sallé, E., Dumont, F.: Simulation of wrinkling during textile composite reinforcement forming. Influence of tensile, in-plane shear and bending stiffnesses. Compos. Sci. Technol. 71(5), 683–692 (2011)
Buet-Gautier, K., Boisse, P.: Experimental analysis and modeling of biaxial mechanical behavior of woven composite reinforcements. Exp. Mech. 41(3), 260–269 (2001)
Gelin, J.C., Cherouat, A., Boisse, P., Sabhi, H.: Manufacture of thin composite structures by the RTM process: numerical simulation of the shaping operation. Compos. Sci. Technol. 56(7), 711–718 (1996)
Ciarlet, P.: Mathematical Elasticity. Theory of Plates, vol. II. Elsevier, Amsterdam (1997)
Ciarlet, P.: Mathematical Elasticity. Theory of Shells, vol. III. Elsevier, Amsterdam (2000)
Vorovich, I.I.: Nonliner Theory of Shallow Shells. Applied Mathematical Sciences, vol. 133. Springer, New York (1999)
Lebedev, L.P., Vorovich, I.I.: Functional Analysis in Mechanics. Springer, New York (2003)
Svetlitsky, V.A.: Statics of Rods. Springer, Berlin (2000)
Bîrsan, M., Altenbach, H., Sadowski, T., Eremeyev, V.A., Pietras, D.: Deformation analysis of functionally graded beams by the direct approach. Compos. Part B: Eng. 43(3), 1315–1328 (2012)
Scerrato, D., Zhurba Eremeeva, I.A., Lekszycki, T., Rizzi, N.L.: On the effect of shear stiffness on the plane deformation of linear second gradient pantographic sheets. ZAMM 96(11), 1268–1279 (2016)
Spagnuolo, M., Barcz, K., Pfaff, A., dell’Isola, F., Franciosi, P.: Qualitative pivot damage analysis in aluminum printed pantographic sheets: numerics and experiments. Mech. Res. Commun. 83, 47–52 (2017)
Steigmann, D.J., dell’Isola, F.: Mechanical response of fabric sheets to three-dimensional bending, twisting, and stretching. Acta Mech. Sin. 31(3), 373–382 (2015)
Fichera, G.: Existence theorems in elasticity. In: Flügge, S. (ed.) Handbuch der Physik, vol. VIa/2, pp. 347–389. Springer, Berlin (1972)
Ciarlet, P.G.: Mathematical Elasticity. Three-Dimensional Elasticity, vol. I. North-Holland, Amsterdam (1988)
Eremeyev, V.A., Lebedev, L.P.: Existence of weak solutions in elasticity. Math. Mech. Solids 18(2), 204–217 (2013)
Lebedev, L.P., Cloud, M.J., Eremeyev, V.A.: Tensor Analysis with Applications in Mechanics. World Scientific, New Jersey (2010)
Germain, P.: La méthode des puissances virtuelles en mécanique des milieux continus. Première partie: théorie du second gradient. J. Mécanique 12, 236–274 (1973)
Fichera, G.: Linear Elliptic Differential Systems and Eigenvalue Problems. Lecture Notes in Mathematics, vol. 8. Springer, Berlin (1965)
Egorov, Y.V., Shubin, M.A.: Foundations of the Classical Theory of Partial Differential Equations. Encyclopaedia of Mathematical Sciences 30, vol. 30, 1st edn. Springer, Berlin (1998)
Agranovich, M.: Elliptic boundary problems. In: Agranovich, M., Egorov, Y., Shubin, M. (eds.) Partial Differential Equations IX: Elliptic Boundary Problems. Encyclopaedia of Mathematical Sciences, vol. 79, pp. 1–144. Springer, Berlin (1997)
Hörmander, L.: The Analysis of Linear Partial Differential Operators. II. Differential Operators with Constant Coefficients. A Series of Comprehensive Studies in Mathematics, vol. 257. Springer, Berlin (1983)
Palamodov, V.P.: Systems of linear differential equations. In: Gamkrelidze, R.V. (ed.) Mathematical Analysis. Progress in Mathematics, pp. 1–35. Springer, Boston (1971)
Besov, O.V., II’in, V.P., Nikol’skii, S.M.: Integral Representations of Functions and Imbedding Theorems, vol. 1. Wiley, New York (1978)
Besov, O.V., II’in, V.P., Nikol’skii, S.M.: Integral Representations of Functions and Imbedding Theorems, vol. 2. Wiley, New York (1979)
Besov, O.V., II’in, V.P., Nikol’skii, S.M.: Integral Representations of Functions and Imbedding Theorems. Nauka, Moscow (1996). (in Russian)
Triebel, H.: Theory of Function Spaces III. Monographs in Mathematics, vol. 100. Birkhäuser, Basel (2006)
Adams, R.A., Fournier, J.J.F.: Sobolev Spaces. Pure and Applied Mathematics, vol. 140, 2nd edn. Academic Press, Amsterdam (2003)
Lions, J.L., Magenes, E.: Non-Homogeneous Boundary Value Problems and Applications, vol. 1. Springer, Berlin (1972)
Lopatinskii, Y.B.: On a method of reducing boundary problems for a system of differential equations of elliptic type to a regular integral equation (in Russian. Ukrain. Math. Zhurnal. 5, 123–151 (1953)
Shapiro, Z.Y.: On general boundary problems for equations of elliptic type (in Russian). Izv. Akad. Nauk SSSR. Ser. Math. 17, 539–562 (1953)
Agmon, S., Douglis, A., Nirenberg, L.: Estimates near the boundary for solutions of elliptic partial differential equations satisfying general boundary conditions. I. Commun. Pure Appl. Math. 12(4), 623–727 (1959)
Agmon, S., Douglis, A., Nirenberg, L.: Estimates near the boundary for solutions of elliptic partial differential equations satisfying general boundary conditions. II. Commun. Pure Appl. Math. 17(1), 35–92 (1964)
Evans, L.C.: Partial Differential Equations. Graduate Series in Mathematics, vol. 19, 2nd edn. AMS Providence, Rhode Island (2010)
Polyanin, A.D., Nazaikinskii, V.E.: Handbook of Linear Partial Differential Equations for Engineers and Scientists, 2nd edn. Chapman and Hall/CRC, Boca Raton (2016)
Laudato, M., Manzari, L., Barchiesi, E., Cosmo, F.D., Göransson, P.: First experimental observation of the dynamical behavior of a pantographic metamaterial. Mech. Res. Commun. 94, 125–127 (2018)
Eremeyev, V.A., Lebedev, L.P.: Existence theorems in the linear theory of micropolar shells. ZAMM 91(6), 468–476 (2011)
Gharahi, A., Schiavone, P.: Uniqueness of solution for plane deformations of a micropolar elastic solid with surface effects. Contin. Mech. Thermodyn. (2019). https://doi.org/10.1007/s00161-019-00779-x
Marin, M., Öchsner, A.: An initial boundary value problem for modeling a piezoelectric dipolar body. Contin. Mech. Thermodyn. 30(2), 267–278 (2018)
Marin, M., Öchsner, A., Taus, D.: On structural stability for an elastic body with voids having dipolar structure. Contin. Mech. Thermodyn. (2019). https://doi.org/10.1007/s00161-019-00793-z
Romano, G., Barretta, R., Diaco, M.: Iterative methods for nonlocal elasticity problems. Contin. Mech. Thermodyn. 31(3), 669–689 (2019)
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Holm Altenbach.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
V.A.E. acknowledges financial support from the Russian Science Foundation under the grant “Methods of microstructural nonlinear analysis, wave dynamics and mechanics of composites for research and design of modern metamaterials and elements of structures made on its base” (No 15-19-10008-P).
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Eremeyev, V.A., Alzahrani, F.S., Cazzani, A. et al. On existence and uniqueness of weak solutions for linear pantographic beam lattices models. Continuum Mech. Thermodyn. 31, 1843–1861 (2019). https://doi.org/10.1007/s00161-019-00826-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00161-019-00826-7