
Abstract
This study discusses an equilibrium state of structures endowed with integrability and relates the structural optimality for Michell’s classic problem and the isothermicity in discrete differential geometry. This discussion leads to a new approach for the parametric generation of quasi-optimal layouts of bar members. The layout of bar members is determined by taking the diagonals of a quadrilateral mesh constructed from a discrete exponential function. The configuration of the planar layout can be changed by adjusting the parameters of a discrete exponential function. In addition, the inverse stereographic projection allows for obtaining spherical shapes from the planar layouts, and the Möbius transformations enable the generation of eccentric near-optimal shapes. It is also demonstrated that the structural layouts generated in this study are the exact optimal or near-optimal solution to Michell’s optimization problem.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
When designing machines and buildings subjected to loads, complex decision-making that balances structural performance and cost is required, and the optimal solution is often not evident. In particular, structural and mechanical optimization to maximize a certain performance index for a given design domain and boundary conditions with little constraint on the connectivity and shape of the structure is called topology optimization. Topology optimization methods have been studied by a large number of researchers for both continuum and discrete structures (Bendsøe and Sigmund 2004).
Michell (1904) formalized a problem to minimize the quantity of material under constraints on the compressive and tensile stresses for given load and support zones without assigning any prior assumptions about the layout of bar members, which is one of the typical topology optimization problems.
Furthermore, Michell (1904) stated that the exact optimal solution to the problem, i.e., the Michell structure, can be obtained by arranging the bars in the principal direction of the virtual strain field. In particular, the optimal solution for a cantilevered structure with a circular support and a nodal load at the tip is composed of two sets of logarithmic spirals intersecting at a constant angle.
Michell’s optimization problem can also be considered for a 3D model, and the original paper also shows the principal strain directions for a sphere subjected to torsion (Michell 1904). Lewiński and Sokół (2014) showed that the absolute values of the maximum and minimum principal strains of the 3D Michell structures need to be constant, and that the structural members should be arranged along the directions of the maximum and minimal principal strains.
Since Michell structures efficiently transmit forces, there are a number of industrial applications inspired by Michell structures. Stromberg et al. (2011) considered a high-rise building subjected to horizontal wind load as a cantilever, and introduced pattern gradation and subdivision of the design domain for topology optimization of the braces. For a similar topology optimization problem, Stromberg et al. (2012) proposed a structural modelling method in which beam elements with 6 degrees of freedom (two translations and one rotation at each end) are placed at the vertical boundary and plate elements with 8 degrees of freedom (two translations at each corner) inside the design domain. These methods yielded a feasible and sparse brace system with a diagrid pattern.
Michell structures are also used for lightweight modeling in mechanical engineering. To reduce the weight while maintaining the stiffness of a gear, Xu and Dai (2021) took an analytical approach to obtain the Michell structure-like topology in the gear body from concentric circles, whose size is naturally determined from the self-similarity of the Michell truss. Such an analytical method requires a low computational cost and can generate promising results of complex topological layouts.
However, it is generally quite difficult to analytically obtain an exact solution to Michell’s problem except for a few special cases. Nonetheless, procedures for analytically obtaining Michell structures have long been studied. Chan (1960) and Hemp (1973) generated Michell structures based on an angular potential. Sokół and Rozvany (2012) analytically obtained the optimal topology of bi-symmetric trusses with two symmetrical point loads, and emphasized that it has taken over hundred years to find the exact extension of Michell’s classical solution to two point loads. Jacot and Mueller (2017) proposed the Michell strain tensor method (MSTM) to extend the existing 2D approach to 3D structures, and the MSTM is proved to be consistent with the previously developed procedures (Chan 1960; Hemp 1973).
As indicated by several studies, a 2D static equilibrium shape can be associated with the Airy stress function (Airy 1863), whose second derivatives, i.e., curvatures in the 3D functional shape, can be regarded as the stress field in the structure. This fact implies that the equilibrium state of structures can be understood graphically. Maxwell (1870) showed that the discretized shape of an Airy stress function has a reciprocal polyhedron. The 2D projections of these shapes visualize the form-force relationship in a truss structure, which is an important fact in graphic statics; see Maxwell (1864).
Although matrix structural analysis has been the mainstream as a structural analysis tool for a century, graphic statics has become an active research subject again in recent years. Baker et al. (2013) disclosed the relationship between Michell structures and the reciprocal diagrams of graphic statics. Mitchell et al. (2016) proved the correspondence between a self-stressed indeterminate truss and the 2D projection of a 3D polyhedron representing an Airy stress function. Williams and McRobie (2016) proved that there exists a bending moment at a discontinuous point of the Airy stress function. Chiang et al. (2021) discretized the Airy stress function with body forces by introducing non-planar facets in representing the functional shape. These works have revitalized the graphic-based structural design.
This study also focuses on the geometric aspects of equilibrium structures similarly to methods based on graphic statics and Airy stress functions; however in a different paradigm. The aim of this study is mathematically finding optimal shapes based on discrete differential geometry, which is an area that has received little attention in structural engineering and vice versa. Schief (2014) showed the equivalence of a discrete shell membrane in equilibrium with purely tangential internal forces, i.e., pure shear stress distribution, and a discrete surface spanned by an isothermic net. In particular, a planar discrete isothermic surface is called a (integrable) discrete holomorphic function or discrete conformal map (Nijhoff and Capel 1995; Bobenko and Pinkall 1996). The studies by Bobenko and Pinkall (1996) and Schief (2014) also discussed the reciprocity of the two isothermic surfaces representing the form-force relationship. Although this reciprocity is evidently similar to graphic statics, there is no explicit mention of an Airy stress function or graphic statics in the aforementioned studies on discrete differential geometry.
In this study, we show that the network of diagonal curves in discrete isothermic surfaces matches the optimal bar layout. This discovery leads to a new parametric approach for analytically obtaining quasi-optimal bar layouts using discrete exponential functions. Unlike the conventional methods of arranging members along the principal strain or stress direction from prescribed support and load conditions, this study simultaneously derives optimal structures and their boundary conditions from the necessary and sufficient conditions for quadrilateral meshes subject to pure shear to be self-equilibrium.
The key contributions in this study are as follows:
-
This research relates the discrete isothermicity in discrete differential geometry and the optimality for Michell’s classic problem in structural/mechanical engineering.
-
Graphic statics-like form-force relationships are derived between discrete exponential functions and their Christoffel transforms.
-
We remark that the diagonals of the lattice of a discrete exponential function constitute an integrable discretization of log-aesthetic curves.
-
The numerical examples demonstrate that the layout of a truss composed of the diagonals is an exact or near-optimal solution in Michell’s optimization problem.
-
Spherical Michell structures are generated through the inverse stereographic projection, and eccentric planar near-optimal structures are generated through the Möbius transformations.
The remainder of this paper is organized as follows. Section 2 mathematically shows that a network of curves constructed from a discrete exponential function coincides with integrable discretization of log-aesthetic curves, which are regarded as bar elements of a Michell structure. Section 3 provides numerical examples to demonstrate that the proposed approach can generate various 2D and 3D Michell structures analytically. Furthermore, it is verified that structural layouts obtained by the proposed approach are the exact optimal or a near-optimal solution to Michell’s optimization problem. Section 4 is a concluding remark that summarizes the above sections and findings in this study.
2 Michell’s structures expressed as discrete holomorphic functions
2.1 Mechanical properties of discrete isothermic surfaces
In this section, we briefly review the results in Schief (2014). Consider a map \(\varvec{r}: \mathbb {Z}^2 \rightarrow \mathbb {R}^3\). For a vertex (u, v) in \(\mathbb {Z}^2\), denote \(\varvec{r}= \varvec{r}(u, v)\), \(\varvec{r}_{(1)} = \varvec{r}(u+1, v)\), \(\varvec{r}_{(2)} = \varvec{r}(u, v+1)\), and \(\varvec{r}_{(12)} = \varvec{r}(u+1, v+1)\). In the following, we assume all the quadrilaterals \([\varvec{r}, \varvec{r}_{(1)}, \varvec{r}_{(12)}, \varvec{r}_{(2)}]\) are planar and concircular. Such a map \(\varvec{r}\) is often called a discrete curvature net or circular net. We also assume that the internal forces \(\varvec{F}_1\), \(\varvec{F}_2\), \(\varvec{F}_{1(1)}\) and \(\varvec{F}_{2(2)}\) act tangentially at the midpoints of the edges; see Fig. 1.

a Internal forces act tangentially on a quadrilateral. b The force equilibrium condition induces another (closed) quadrilateral
Since the edges and forces are parallel, we have relations
where \(\alpha\) and \(\beta\) are some real functions. In order for a quadrilateral \([\varvec{r}, \varvec{r}_{(1)}, \varvec{r}_{(2)}, \varvec{r}_{(12)}]\) to be in equilibrium, we must have
where Eq. (2) is the force equilibrium condition, and Eqs. (3) and (4) collectively represent the moment equilibrium condition around \(\varvec{r}\) and \(\varvec{r}_{(1)}\), respectively. The force equilibrium condition Eq.(2) suggests there exists another map \(\overline{\varvec{r}}\) satisfying
Substituting Eq.(5) into Eq.(1), we have
Note that the corresponding edges of \(\overline{\varvec{r}}\) and \(\varvec{r}\) are parallel. \(\overline{\varvec{r}}\) is called a discrete Combescure transform of \(\varvec{r}\). Moreover, the moment equilibrium condition Eq.(3) and (4) gives the following conditions:
which means “non-corresponding” diagonals are parallel. In the field of discrete differential geometry, this property is known as the condition for \(\varvec{r}\) to be a discrete isothermic surface and \(\overline{\varvec{r}}\) is called the discrete Christoffel transform of \(\varvec{r}\) (Bobenko and Pinkall 1996). In conclusion, we have the following theorem.
Theorem 2.1
(Schief 2014, Theorem 3.2) Assume that purely tangential internal forces act at the midpoints of the edge of a discrete curvature net \(\varvec{r}\). Then, \(\varvec{r}\) is in equilibrium if and only if \(\varvec{r}\) constitutes a discrete isothermic surface, and the internal forces are encoded in the discrete Christoffel transform \(\overline{\varvec{r}}\).
This theorem can also be interpreted that the quadrilateral elements of a discrete isothermic surface \(\varvec{r}\) are in equilibrium with pure shear. In structural mechanics, if \(\varvec{r}\) is a form diagram of the structure, then \(\overline{\varvec{r}}\) is so-called the force diagram acting on \(\varvec{r}\). The correspondence is known as graphic statics (Maxwell 1870, 1864).
By replacing the quadrilaterals with their diagonals, we obtain a truss structure in equilibrium with only axial forces; see Fig. 2. The axial forces are also encoded in the discrete Christoffel transform \(\overline{\varvec{r}}\); i.e., the length of the diagonal of \(\overline{\varvec{r}}\) represents the magnitude of axial force in the corresponding diagonal bar member in \(\varvec{r}\). This suggests that the relative magnitude of axial force in a bar member can be geometrically obtained without recursive computation once the shape of the corresponding isothermic quadrilateral element is locally determined.

The diagonal members transmit forces only by their axial forces
In the following, we restrict the target space to the 2-dimensional plane \(\mathbb {R}^2\), which can be identified with the complex plane \(\mathbb {C}\). In this case, a discrete isothermic surface \(\varvec{r}: \mathbb {Z}^2 \rightarrow \mathbb {C}\) is called an (integrable) discrete holomorphic function or a discrete conformal map. Note that the condition for the discrete isothermic surface can be characterized by the cross-ratio condition. The cross-ratio Q for a quadrilateral \([\varvec{r}, \varvec{r}_{(1)}, \varvec{r}_{(2)}, \varvec{r}_{(12)}]\) is defined by
where the division is in the sense of complex numbers. In this article, for simplicity, we define the discrete holomorphicity as follows:
Definition 2.2
A map \(\varvec{r}: \mathbb {Z}^2 \rightarrow \mathbb {C}\) is called a discrete holomorphic function if all the quadrilaterals of a map \(\varvec{r}: \mathbb {Z}^2 \rightarrow \mathbb {C}\) have the cross-ratio \(Q = -1\).
Example 2.3
(Bobenko and Pinkall 1996) Let us consider a map \(\varvec{r}(u, v) = \exp (\rho u + \sqrt{-1} \kappa v)\), where \(\rho\) and \(\kappa\) are real constants. A direct calculation shows that \(\varvec{r}\) has cross-ratio \(Q = -1\) if and only if
holds. If \(\rho\) and \(\kappa\) satisfy this condition, then we call \(\varvec{r}\) discrete exponential function. Moreover, the Christoffel transform \(\overline{\varvec{r}}\) of \(\varvec{r}\) is given as follows:
Proof
If we note the relations
then we have
This shows Eq.(9). It is known that the Christoffel transform \(\overline{\varvec{r}}\) is determined by the following formula (Bobenko and Pinkall 1996):
A direct calculation shows
On the other hand, if we put \(\overline{\varvec{r}} (u, v) = C_0 \exp (- \rho u + \sqrt{-1} \kappa v)\), where \(C_0\) is a real constant, then we have
By comparing Eqs. (14) and (15), we have
which proves Eq.(10). \(\square\)
Examples of discrete exponential functions are shown in Fig. 4.
2.2 Relation with discrete log-aesthetic curves
In this section, we remark that discrete curves obtained from the diagonals of the lattice of the discrete exponential function are an integrable discretization of log-aesthetic curves. The notion of log-aesthetic curves (LACs) has been originally proposed by extracting the common properties from thousands of plane curves that car designers regard as aesthetic. It was shown that the LAC can be characterized by the invariant curves of integrable deformation of plane curves in similarity geometry (Inoguchi et al. 2018a). An integrable discretization of the LAC (dLAC) is proposed by Inoguchi et al. (2018b) as follows (Fig. 3).
A sequence of points in the plane \(\gamma _n \in \mathbb {C}\) (\(n \in \mathbb {Z}\)) is called a discrete curve. The angle \(\kappa _n = \angle (\gamma _n - \gamma _{n-1}, \gamma _{n+1} - \gamma _n)\) is called the turning angle.

Notations for a discrete curve \(\gamma _n\)
We put \(q_n:= |\gamma _{n+1} - \gamma _n|\) and \(s_n:= q_{n+1}/q_n\). \(s_n\) is called the discrete similarity curvature.
Definition 2.4
A discrete curve \(\gamma _n \in \mathbb {C}\) is called a discrete log-aesthetic curve (dLAC) of slope \(\alpha\) if the following conditions are satisfied:
-
1.
\(\gamma _n\) has constant turning angle \(\kappa _n = \kappa\).
-
2.
\(s_n\) satisfies the equation
$$\begin{aligned} s_n = {\left\{ \begin{array}{ll} \left( 1 + \frac{(\alpha -1) \lambda \kappa }{(\alpha -1) \lambda \kappa n + 1} \right) ^{1/(\alpha -1)}, &{}\textrm{if} \ \alpha \ne 1, \\ \exp (\lambda \kappa ), \quad &{}\textrm{if} \ \alpha = 1, \end{array}\right. } \end{aligned}$$(17)where \(\lambda\) is a constant.
The discrete curve \(\gamma _n\) obtained from the diagonals of the lattice of a discrete exponential function \(\varvec{r}\) can be written in the form
where \(\varvec{r}_0 \in \mathbb {C}\) is a fixed point. Then we can show the following result:
Theorem 2.5
The discrete curve \(\gamma _n\) in the form Eq.(18) has a constant turning angle \(\kappa\), and satisfies \(s_n = e^\rho\). In other words, \(\gamma _n\) is a dLAC of slope 1.
In the smooth setting, a LAC of slope 1 corresponds to a logarithmic spiral. Therefore, we call a discrete curve defined in Eq.(18) discrete logarithmic spiral.
3 Numerical examples
3.1 Example 1: planar discrete logarithmic net
3.1.1 Planar structural shape obtained from discrete exponential function
In the following, units are omitted because they are not important in this study. Consider the following function parametrized by integers u and v:
For Eq.(19) to be a discrete holomorphic function, \(\rho\) needs to be expressed as the function of \(\kappa\) as
Equation (20) is easily derived from Eq.(9) in Sec. 2.1. Therefore, if discrete holomorphicity is enforced, Eq.(19) becomes a function parametrized by \(\kappa\) only.
Considering this function in a complex coordinate system, u determines the distance from the origin, and v determines the circumferential position around the origin. Particularly when \(\kappa = 2\pi /j\) \((j\in \mathbb {N})\), the function F is periodic with respect to v at the following interval:
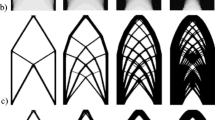
In the following, the numbers of grids in u and v directions are denoted as \(n_{\textrm{u}}\) and \(n_{\textrm{v}}\), respectively. Figure 4 illustrates the generated shape based on the discrete exponential function for various combinations of \(n_{\textrm{u}}\), \(n_{\textrm{v}}\) and \(\kappa\). As \(n_{\textrm{u}}\) and \(n_{\textrm{v}}\) increase, the shape of a pair of boundary curves approaches a smooth arc with central angle \(\kappa n_{\textrm{v}}\).

Generated planar shapes of Eq. (19) for various combinations of \(n_{\textrm{u}}\), \(n_{\textrm{v}}\) and \(\kappa\). The bold diagonal lines can be regarded as candidate members comprising an optimal structure
Note that when \(\kappa\) is exactly 0, \(\rho\) also becomes 0, and the function Eq.(19) cannot generate a meaningful shape.
3.1.2 Optimal wheel composed of discrete logarithmic spirals
Figure 5 is an example of wheel structure generated by the proposed approach and its Christoffel transform when \(n_{\textrm{u}}=4\), \(n_{\textrm{v}}=16\), and \(\kappa =\pi /8\). Note that the Christoffel transform is scaled to the size of the original shape. As highlighted in Fig. 5, the position of each quadrilateral element is flipped in the radial direction after the Christoffel transformation.

Generated shape (left) and its Christoffel transform (right) in the case \(n_{\textrm{u}}=4\), \(n_{\textrm{v}}=16\), and \(\kappa =\pi /8\). Bold lines represent the Michell-like structure generated by the proposed approach
The original quad-mesh and its Christoffel transform in Fig. 5 are self-reciprocal. Interestingly, this fact coincides with the characteristic of Michell structures: the self-reciprocity between the force and form diagrams in the framework of graphic statics (Baker et al. 2013).
Next, the generated structure is pin-supported along the internal contour and a circumferential unit load is applied to the outer nodes to apply a torsional load. Figure 6 illustrates the axial forces of the structure computed by linear structural analysis. Note that the axial forces can be computed regardless of the size and material properties of bar members because the layout is statically determinate. As similar shapes are already shown in many articles (Hemp 1973; Jacot and Mueller 2017; Graczykowski and Lewiński 2005), the torsional loads are efficiently transmitted to the pin-supports by the axial forces along the discrete logarithmic spirals. In this case, the gradient of the objective function Eq.(A.2) is zero for all the internal nodes, and thus the generated structure is the strict stationary point of Michell’s optimization problem: minimizing the sum of the products of the absolute value of axial force and the member length.

The axial forces in the structure of Fig. 5 subject to a uniform torsion
In fact, the internal forces of this structure can be geometrically obtained without structural analysis, using the theorem that the internal forces of a discrete isothermic surface are encoded in the discrete Christoffel transform (Schief 2014). According to Ref. Schief (2014), the internal shear forces in the edges of the discrete isothermic surface are proportional to the edge lengths of its Christoffel transform. Similarly, we found that the magnitude of the axial force is proportional to the edge length in the Christoffel transform, as shown in Table 1.
3.1.3 Extraction of partial structure
It is also possible to construct a partial structure from the optimal wheel by extracting the discrete logarithmic spirals from one or more loaded nodes to the central pin-supports. The shape of this substructure has been widely recognized to efficiently transmit loads for the load condition in Fig. 7a. Moreover, since the quadrilateral mesh generated by a discrete holomorphic function is an equilibrium shape with pure shear, the substructures are also considered to be near-optimal when loads corresponding to pure shear are applied to all the external nodes, as shown in Fig. 7b.

Boundary conditions for which the 2D substructures are considered optimal. a Single tip load in the circumferential direction. b Loads equivalent to the pure shear forces in the discrete isothermic surface
Let \(R_{\textrm{i}}\) and \(R_{\textrm{o}}\) denote the inner and outer diameters of the discrete exponential function, respectively. As seen in Fig. 7, \(R_{\textrm{i}}\) can be regarded as the radius of the boundary circle, and \(R_{\textrm{o}}\) as the distance from the center of the boundary circle to the tip loaded node. In the following, \(\kappa\) is set such that \(R_{\textrm{o}}/R_{\textrm{i}}=4.81\), and the overall shape is scaled such that \(R_{\textrm{i}}=1\) to compare the results to Ref. Lewiński et al. (2019).
In the following, the magnitude of the tip load in the load condition Fig. 7a is one, and the magnitude of the loads for Fig. 7b is scaled such that the sum of the lengths of the load vectors becomes one.
Figure 8 shows the partial structures subject to a unit nodal load in the circumferential direction. As the number of bars increases, the axial force concentrates on the external bars, and the maximum axial force is reduced. Figure 9 shows the same structures subject to nodal loads equivalent to pure shear; as the number of bars increases, each discrete logarithmic spiral transfers the nodal load to the support more smoothly.

The axial forces in the substructures subject to load condition Fig. 7a. a \((n_{\textrm{u}},n_{\textrm{v}})=(2,4)\). b \((n_{\textrm{u}},n_{\textrm{v}})=(32,64)\)

The axial forces in the substructures subject to load condition Fig. 7b. a \((n_{\textrm{u}},n_{\textrm{v}})=(2,4)\). b \((n_{\textrm{u}},n_{\textrm{v}})=(32,64)\)
However, when only a partial structure is considered, the layout based on the logarithmic curves is not an exact optimal solution among the trusses of the same number of bars (Lewiński et al. 2019), as shown in Fig. 10.

Shape change before and after optimization for the case of \(n_{\textrm{u}}=4\) and \(n_{\textrm{u}}=8\). The shape “before” is determined from the discrete exponential function only, and the shape “after” is obtained after solving the optimization problem Eq.(A.1)
To evaluate the generated shapes in terms of the optimality criterion of Michell’s optimization problem, Tables 2 and 3 describe the relationship between the resolution of the generated substructures and the deviation from the Michell’s optimal structure. The sensitivity is computed following the procedure in 1. The optimization is implemented using SLSQP (Kraft 1988; The SciPy community 2022), a mathematical algorithm based on sequential quadratic programming (SQP). The optimization process stops when the change of the objective function value is less than the tolerance of \(1.0\times 10^{-7}\).
Tables 2 and 3 demonstrate that the proposed approach well approximates the stationary point of Michell’s structural optimization problem for the load conditions illustrated in Fig. 7a and b. The sensitivity with respect to the nodal positions \(\nabla F\) diminishes as the number of bar members increases, and the changes of nodal positions \(\textbf{D}\) and the objective function F reduces accordingly. \(F_{\textrm{before}}\) and \(F_{\textrm{after}}\) are the objective function values of the analytical solution obtained by the proposed approach and its modified solution by SLSQP. \(F_{\textrm{cf}}\) in the rightmost column of Table 2 is the equivalent objective function value described in Table 4.2 of the book (Lewiński et al. 2019). Compared with the analytical solutions found by Lewiński et al. (2019), those obtained by the proposed approach surpass the structural performance when the number of bar members is large enough, as seen in that \(F_{\textrm{before}}\) is less than \(F_{\textrm{cf}}\) for \(8\times 16\), \(16\times 32\), and \(32\times 64\) cases.
Furthermore, another type of Michell-like structures having a single loaded node and two pin-supports, i.e., a solution to the three-point problem (Mazurek 2012), can be generated by extracting a part of the force diagram as a new structural layout, as shown in Fig. 11. Note that this structural layout found in the force diagram is also an approximate optimal solution to Michell’s optimization problem, not an exact optimal solution.

Generation of another Michell-like structure using discrete Combescure transformation
3.2 Example 2: spatial discrete logarithmic net
3.2.1 Spherical structural shapes generated by inverse stereographic projection
Consider a 3D extension of the shapes in the previous section using the inverse of the stereographic projection. Stereographic projection is a method of projecting a geometry on a unit sphere onto a plane (Ahlfors 1979), and its inverse is defined as projecting a planar geometry onto a unit sphere. Figure 12 illustrates the spherical shapes corresponding to Fig. 4. In Fig. 12, the shapes of Fig. 4 are also illustrated to show the shape change by the inverse stereographic projection. Similarly to the planar cases, as \(n_{\textrm{u}}\) and \(n_{\textrm{v}}\) increase, the shape of a pair of boundary curves approaches a smooth spherical surface with azimuth angle \(\kappa n_{\textrm{v}}\).

Generated spherical shapes for various combinations of \(n_{\textrm{u}}\), \(n_{\textrm{v}}\) and \(\kappa\). The bold diagonal lines can be regarded as candidate members comprising a Michell structure
Particularly, the diagonal lines on the hemispheres in the row \(\kappa =2\pi /n_{\textrm{v}}\) coincides with the half part of the spherical optimal structure subject to torsion presented by Michell (1904). Considering the symmetry of the Michell sphere, mirroring the diagonal lines obtained by the proposed approach yields the equivalent Michell sphere, as shown in Fig. 13.

Construction of the Michell sphere from the diagonal lines (\(n_{\textrm{u}}=n_{\textrm{v}}=24\) and \(\kappa =\pi /12\))
3.2.2 Optimal spherical zone composed of discrete logarithmic spirals
Bobenko and Pinkall (1996) proved that the inverse map of the stereographic projection of an arbitrary discrete holomorphic function on a plane yields a discrete isothermic surface on a unit sphere. Therefore, the inverse map of the planar optimal wheel (Fig. 5), as shown in Fig. 14a, should preserve its optimality. Figure 14b further illustrates the Christoffel transform of the shapes in Fig. 14a. Note that the shapes in Fig. 14 are resized to have the same scale. The 3D quadrilateral meshes in Fig. 14 are known to be the Christoffel dual of the Gauss map and a discrete catenoid (Schief 2014).

Comparison of the shapes before and after the inverse stereographic projection in the case \(n_{\textrm{u}}=4\), \(n_{\textrm{v}}=16\), and \(\kappa =\pi /8\). a 2D discrete exponential function and its inverse map of the stereographic projection. b Christoffel transform of the shapes of (a)
Figure 15 describes the internal forces in the bar members subject to torsional nodal loads. Although the structure is evidently unstable due to insufficient number of bar members, solving the linear stiffness equation was successful for this specific load case, where a unit size and a unit elastic modulus were assigned to each member. Note that constraining movement of the free nodes in the height direction did not affect the linear structural analysis result; i.e., the free nodes do not displace in the height direction under the assumption of infinitesimal deformation.

The axial forces in the structure of Fig. 14 subject to a uniform torsion
Similarly to Table 1, the relative magnitude of internal forces can be geometrically obtained from the Christoffel transform, as shown in Table 4; the axial forces are proportional to the corresponding edge lengths in the Christoffel transform. The values of \(|N| \cdot L\) are the same in Tables 1 and 4. This suggests that the value of the objective function of Michell’s optimization problem, represented by Eq.(A.1), does not change after the Christoffel transformation if the overall shape is scaled to maintain the same outer diameters as depicted in Fig. 14a.
3.2.3 Extraction of partial structure
Similarly to the planar cases, structures made by extracting a part of the members constituting the spherical zone can also be considered near-optimal for the load conditions illustrated in Fig. 16, where \(\tilde{R}_{\textrm{i}}\) can be regarded as the radius of the boundary circle, and \(\tilde{R}_{\textrm{o}}\) as the radius of the circle in which the loaded tip node is located.

Boundary conditions for which the 3D substructures are considered optimal. a Single tip load in the circumferential direction. b Loads equivalent to the pure shear forces in the discrete isothermic surface
The partial structures are unstable with the degree of instability same as the number of unconstrained nodes. To find the gradients for Michell’s optimization problem, fictitious roller supports that constrain vertical displacements shall be assumed at the unconstrained nodes and the gradients are computed for the horizontal degrees of freedom. Although the vertical equilibrium is ignored by these supports, it is worthwhile to examine the deviation of the partial structures from the exact optimal solution. Note that gradients of the nodal locations in the vertical direction are significantly larger when the displacements are fixed horizontally, not vertically; this implies that the partial structures are very sensitive to the nodal locations due to their boundary condition and unstable connectivity in 3D space.
In the following, the magnitude of the tip load in the load condition Fig. 16a is one, and the magnitude of the loads for Fig. 16b is scaled such that the sum of the lengths of the load vectors becomes one. \(\kappa\) is set such that \(R_{\textrm{o}}/R_{\textrm{i}}=4.81\), and the overall shape is scaled such that \(\tilde{R}_{\textrm{o}}=4.81\) to align the planar position where the load is applied with Sec. 3.1.3. In this case, the radius of the boundary circle changes when the inverse of the stereographic projection is performed: \(\tilde{R}_{\textrm{i}}=1.917\).
Figure 17 shows the partial structures subject to a unit nodal load in the circumferential direction. In Fig. 17b, large axial forces are observed near the loaded node, whereas the axial loads are concentrated in the exterior bars in the planar example of Fig. 8b. Figure 18 shows the same structures subject to nodal loads equivalent to pure shear. In this case, a uniform axial force distribution similar to the planar case Fig. 9b was obtained.

The axial forces in the substructures subject to load condition Fig. 16a. a \((n_{\textrm{u}},n_{\textrm{v}})=(2,4)\). b \((n_{\textrm{u}},n_{\textrm{v}})=(32,64)\)

The axial forces in the substructures subject to load condition Fig. 16b. a \((n_{\textrm{u}},n_{\textrm{v}})=(2,4)\). b \((n_{\textrm{u}},n_{\textrm{v}})=(32,64)\)
Tables 5 and 6 describes the deviation from the optimal solutions with the same connectivity. Note that the vertical nodal coordinates are excluded from the design variables, and free nodes move only horizontally during optimization. Similar to the planar cases Tables 2 and 3, the optimality condition of Michell’s optimization problem is satisfied with better accuracy as the number of bar members increases. Furthermore, as seen in the column of \(F_{\textrm{before}}\) in Table 2 and Table 5, the inverse of the stereographic projection does not change the value of the objective function if the overall shape is appropriately scaled such that \(R_{\textrm{o}}=\tilde{R}_{\textrm{o}}\) and the unsupported nodes are fixed to move in the vertical direction.
3.3 Example 3: eccentric-shaped structures
In the previous example, we took the advantage of the property of the stereographic projection of preserving the isothermicity of discrete surfaces to transform planar optimal structures into spherical shapes. In this example, we introduce rotation, which also preserves the isothermicity, to generate eccentric shapes while preserving the connectivity of bar members.
Figure 19 illustrates the operations to obtain an eccentric shape and its load condition. First, the spherical Michell structure is rotated around a tilted axis. In Fig. 19, the rotation angle \(\theta\) is \(\pi /8\), and the axis directs from the origin to (0, 0.1, 0.9). Next, the rotated shape is projected onto a plane using the stereographic projection. Since the steps above preserve isothermicity, the obtained eccentric quadrilateral mesh is also an equilibrium shape with pure shear. The aforementioned processes can also be interpreted as Möbius transformations. Finally, non-uniform torsional loads are computed from the Christoffel transform of the 2D projection.
Since the Christoffel transformation reverses the inside and outside of a surface, the vectors connecting the innermost diagonal ends of the Christoffel transformed shape are the load vectors to be applied to the outermost nodes of the original surface. For this load condition, all the bar members have the same value of \(|N| \cdot L\); when the sum of the load vector lengths is 8, which is the same as Fig. 6, \(|N| \cdot L= 1.597\).

The steps to generate an eccentric planar near-optimal structure and its load condition using rotation, the stereographic projection, and the Christoffel transformation
However, the eccentricity degrades the optimality of the shape to Michell’s optimization problem. Table 7 describes the maximum values of \(\nabla F\) for the shapes with variable resolution \(n_{\textrm{u}} \times n_{\textrm{v}}\) and rotation angle \(\theta\). Since larger \(\theta\) induces larger eccentricity, Table 7 suggests that the shape deviates from the optimal solution as the eccentricity increases. On the other hand, the table also shows that the degradation of optimality can be mitigated by increasing the numbers \(n_{\textrm{u}}\) and \(n_{\textrm{v}}\). Therefore, the process to generate eccentric-shaped structures explained in this section can approximate the optimal solution at high precision if the member arrangement is dense enough.
Especially for the case \(n_{\textrm{u}}=4\), \(n_{\textrm{v}}=16\), and \(\theta =\pi /8\), Fig. 20 illustrates the shape change of the eccentric structure by solving Michell’s optimization problem. It can be seen from Fig. 20 that the more the distance from the focus, the greater the node shifts due to optimization.

Shape change before and after optimization for the eccentric wheel shape with parameters \(n_{\textrm{u}}=4\), \(n_{\textrm{v}}=16\), and \(\theta =\pi /8\)
4 Conclusion
This paper discussed the discrete isothermicity and Michell structures in a unified manner, based on the fact that a quadrilateral mesh constructed from a discrete holomorphic function is an equilibrium shape in pure shear. The layout of quasi-optimal structure can be obtained by taking the diagonals of a quadrilateral mesh constructed from a discrete exponential function, which is a subclass of discrete holomorphic function.
By changing the parameters of a discrete exponential function, a variety of planar shapes composed of discrete log-aesthetic curves can be generated geometrically. 3D spherical Michell structures can also be generated, taking advantage of the fact that the isothermicity of surfaces, i.e., the property that surfaces are in equilibrium in pure shear, is retained after the stereographic projection. Furthermore, eccentric planar near-optimal structures can be obtained through the Möbius transformations that project the spherical shape onto a plane using the stereographic projection after rotation around a tilted axis.
The numerical examples confirmed the degree to which the generated shapes satisfy the optimality conditions. In particular, we demonstrated that the wheel structure and its inverse stereographic projection, the spherical zone structure, are the exact stationary point of Michell’s optimization problem. For these structures, the magnitude of axial force against torsion is inversely proportional to the member length and proportional to the length in the reciprocal diagram.
For partial structures and eccentric structures, the shape is not the exact optimal solution to Michell’s optimization problem; still, it was found that the denser the member arrangement is, the more accurately the shape can approximate the optimal solution. Furthermore, we also verified the optimality of the partial structures when the loads corresponding to pure shear in the quadrilateral mesh are applied to all the outer free nodes, and the shape is found to be an approximate optimal solution for such a load condition.
A discrete isothermic surface and its diagonals can be encoded into a reciprocal diagram that expresses the forces in equilibrium by the Christoffel transformation. This form-force relationship can potentially constitute another tool for reciprocal diagram analysis of Michell structures, different but similar to graphic statics.
References
Ahlfors LV (1979) Complex analysis - an introduction to the theory of analytic functions of one complex variable, 3rd edn. McGraw-Hill Book Company, New York
Airy GB (1863) On the strains in the interior of beams. Philos Trans R Soc Lond 153:49–79. https://doi.org/10.1098/rstl.1863.0004
Baker WF, Beghini LL, Mazurek A, Carrion J, Beghini A (2013) Maxwell’s reciprocal diagrams and discrete michell frames. Struct Multidisc Optim 48:267–277. https://doi.org/10.1007/s00158-013-0910-0
Bendsøe MP, Sigmund O (2004) Topology optimization - theory, methods, and applications. Springer Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-05086-6
Bobenko A, Pinkall U (1996) Discrete isothermic surfaces. J für die reine und angewandte Math 1996:187–208. https://doi.org/10.1515/crll.1996.475.187
Chan ASL (1960) The design of Michell optimum structures Reports and Memoranda. Aeronautical Research Council Reports and Memoranda, no. 3303, 1–40
Chiang Y-C, Buskermolen P, Borgart A (2021) Discretised airy stress functions and body forces. Proceedings of Advances in Architectural Geometry 2020:62–83
Graczykowski C, Lewiński T (2005) The lightest plane structures of a bounded stress level transmitting a point load to a circular support. Control Cybern 34:227–253
Hemp WS (1973) Optimum structures. Aeronaut J 77:305. https://doi.org/10.1017/S000192400004094X
Inoguchi J, Kajiwara K, Miura KT, Sato M, Schief WK, Shimizu Y (2018) Log-aesthetic curves as similarity geometric analogue of euler’s elasticae. Comput Aided Geom Des 61:1–5. https://doi.org/10.1016/j.cagd.2018.02.002
Inoguchi J, Jikumaru Y, Kajiwara K, Miura KT, Schief WK (2023) Log-aesthetic curves: similarity geometry, integrable discretization and variational principles. Comput Aided Geom Des 105:102233. https://doi.org/10.1016/j.cagd.2023.102233
Jacot BP, Mueller CT (2017) A strain tensor method for three-dimensional michell structures. Struct Multidisc Optim 55:1819–1829. https://doi.org/10.1007/s00158-016-1622-z
Kraft D (1988) A Software Package for Sequential Quadratic Programming, Technical Report DFVLR-FB 88-28, DLR German Aerospace Center - Institute for Flight Mechanics, Koln, Germany
Lewiński T, Sokół T (2014) On basic properties of Michell’s structures. In: Rozvany GIN, Lewiński T (eds) Topology optimization in structural and continuum mechanics. CISM International Centre for Mechanical Sciences, vol 549, pp 87–128, Springer, Vienna. https://doi.org/10.1007/978-3-7091-1643-2_6
Lewiński T, Sokół T, Graczykowski C (2019) Michell Structures. Springer, Cham. https://doi.org/10.1007/978-3-319-95180-5
Maxwell JC (1864) On reciprocal figures and diagrams of forces. Phil Mag 27:250–261. https://doi.org/10.1080/14786446408643663
Maxwell JC (1870) On reciprocal figures and diagrams of forces. Trans Royal Soc Edinburgh 26:1–40. https://doi.org/10.1017/S0080456800026351
Mazurek A (2012) Geometrical aspects of optimum truss like structures for three-force problem. Struct Multidisc Optim 45:21–32. https://doi.org/10.1007/s00158-011-0679-y
Michell A (1904) The limits of economy of material in frame-structures. Phil Mag 8:589–597. https://doi.org/10.1080/14786440409463229
Mitchell T, Baker W, McRobie A, Mazurek A (2016) Mechanisms and states of self-stress of planar trusses using graphic statics, part i: the fundamental theorem of linear algebra and the airy stress function. Int J Space Struct 31:85–101. https://doi.org/10.1177/0266351116660790
Nijhoff F, Capel H (1995) The discrete korteweg-de vries equation. Acta Appl Math 39:133–158. https://doi.org/10.1007/BF00994631
Schief WK (2014) Integrable structure in discrete shell membrane theory. Proc Royal Soc A Math Phys Eng Sci 470. https://doi.org/10.1098/rspa.2013.0757
Sokół T, Rozvany G (2012) New analytical benchmarks for topology optimization and their implications. part i: Bi-symmetric trusses with two point loads between supports. Struct Multidiscip Optim. https://doi.org/10.1007/s00158-012-0786-4
Stromberg LL, Beghini A, Baker WF, Paulino GH (2011) Application of layout and topology optimization using pattern gradation for the conceptual design of buildings. Struct Multidisc Optim 43:165–180. https://doi.org/10.1007/S00158-010-0563-1
Stromberg LL, Beghini A, Baker WF, Paulino GH (2012) Topology optimization for braced frames: Combining continuum and beam/column elements. Eng Struct 37:106–124. https://doi.org/10.1016/j.engstruct.2011.12.034
The SciPy community (2022) Scipy API reference, https://docs.scipy.org/doc/scipy/reference/optimize.minimize-slsqp.html. Accessed 21 Dec 2022
Williams C, McRobie A (2016) Graphic statics using discontinuous airy stress functions. Int J Space Struct 31:121–134. https://doi.org/10.1177/0266351116660794
Xu G, Dai N (2021) Michell truss design for lightweight gear bodies. Math Biosci Eng 18:1653–1669. https://doi.org/10.3934/mbe.2021085
Acknowledgements
This study is supported by JST CREST Grant No. JPMJCR1911, Joint Research Center for Advanced and Fundamental Mathematics-for-Industry Grant No. 2022a034, and JSPS KAKENHI Grant No. JP21K03329.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Replication of results
The codes to reproduce the results presented in this paper are available at the following link: https://github.com/kazukihayashi/Discrete_Exponential_Functions_for_Michell_Structures
Additional information
Responsible Editor: Matthew Gilbert
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A. Sensitivity analysis of Michell’s optimization problem
Appendix A. Sensitivity analysis of Michell’s optimization problem
Let \(\textbf{N}\) and \(\textbf{L}\) denote axial force and member length vectors of bar members, respectively. Among several formulations for Michell’s optimization problem, the following formulation is considered here:
where \(\cdot\) indicates the inner product operation and \(| \ |\) indicates taking an absolute value of each component in the vector. Differentiation of the objective function with respect to nodal coordinate \(x_j\) leads to
where \(\odot\) indicates element-wise product operation. The sensitivity of member length \({\partial \textbf{L}}/{\partial x_j}\) is easily obtained geometrically. The sensitivity of axial force \({\partial \textbf{N}}/{\partial x_j}\) is derived in the following.
Remember that the internal axial forces \(\textbf{N}\) can be associated with the external nodal load vector \(\textbf{p}_{\textrm{d}}\) by the following equilibrium equation:
where \(\textbf{A}_{\textrm{d}}\) is the equilibrium matrix, which is a square matrix when the structure is statically determinate. Differentiation of both sides of Eq.(A.3) leads to
Equation (A.4) can be rewritten to
Since \(\textbf{A}_{\textrm{d}}\) is determined geometrically, \({\partial \textbf{A}_{\textrm{d}}}/{\partial x_j}\) can also be easily obtained in a similar manner as \({\partial \textbf{L}}/{\partial x_j}\).
This way, the sensitivity of the objective function F can be obtained analytically. This sensitivity can be utilized to verify if the generated Michell-like structures satisfy the optimality condition; the optimal structures should satisfy \({\partial F}/{\partial x_j} \approx 0\) for index j of the free nodal coordinates.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hayashi, K., Jikumaru, Y., Yokosuka, Y. et al. Parametric generation of optimal structures through discrete exponential functions: unveiling connections between structural optimality and discrete isothermicity. Struct Multidisc Optim 67, 41 (2024). https://doi.org/10.1007/s00158-024-03767-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00158-024-03767-1