
Abstract
In this paper, we consider, from both analytical and numerical viewpoints, a thermoelastic problem. The so-called MGT model, with two different relaxation parameters, is used for both the displacements and the thermal displacement, leading to a linear coupled system made by two third-order in time partial differential equations. Then, using the theory of linear semi-groups the existence and uniqueness to this problem is proved. If we restrict ourselves to the one-dimensional case, the exponential decay of the energy is obtained assuming some conditions on the constitutive parameters. Then, using the classical finite element method and the implicit Euler scheme, we introduce a fully discrete approximation of a variational formulation of the thermomechanical problem. A main a priori error estimates result is shown, from which we conclude the linear convergence under suitable additional regularity conditions. Finally, we present some one-dimensional numerical simulations to demonstrate the convergence of the fully discrete approximation, the behavior of the discrete energy decay and the dependence on a coupling parameter.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The study of the thermoviscoelastic theories has deserved much interest in the recent years. This is because, in many elastic materials, we can observe viscous mechanical aspects as well as the sensitivity to the thermal effects. We can see that the most general way to propose both aspects can be given by the Kelvin–Voigt dissipation mechanism for the viscosity and the Fourier heat conduction constitutive theory. Unfortunately, both aspects have a relevant drawback. The mechanical (thermal) waves for the theories based on the Kelvin–Voigt (Fourier) theory propagate instantaneously. That is, a mechanical (thermal) deformation imposed in a point in space is felt immediately at any other point in space. This fact violates in a relevant way the so-called causality principle.
This has been the reason why several alternatives theories have been proposed for the heat conduction. However, it is surprising that, although we have a similar effect when we consider the Kelvin–Voigt theory, this fact has not received particular attention.
The most known way to overcome the paradox of the infinite speed of propagation for the thermal waves is the Cattaneo–Maxwell proposition [6], which suggests the introduction of a relaxation parameter. This idea brings to Lord and Shulmann to propose their famous thermoelastic theory [19]. After some time, many other theories were considered. In particular, we can recall the works of Green and Naghdi [12, 13], who presented three new theories that they called type I, II and III, respectively. The difference among them comes from the choice of the independent constitutive variables. Linear version of type I recovers the classical theory of heat conduction, but types II and III became new theories which have deserved much attention over the last twenty-five years. The most general one is the type III theory, which contains the other two theories as limit cases. Unfortunately, type III theory has the same drawback as the classical Fourier law: the thermal waves also propagate instantaneously. For this reason, using a similar idea to the one proposed by Cattaneo and Maxwell, it is natural to introduce a relaxation parameter to bring hyperbolic the equation. Then, we obtain the Moore–Gibson–Thompson equation [21] and so, it is natural to consider the Moore–Gibson–Thompson thermoelasticity.
If we look for the viscous mechanical effect proposed by Kelvin and Voigt, we are in front of an equation (system) which is similar to the type III heat conduction (although with other physical meaning). Then, we also recover the paradox of the infinite speed of propagation of the mechanical waves. It is worth saying that few criticism has deserved this theory, if we compare with the one received by the Fourier or Green–Naghdi theories, but it is also natural to try to overcome the paradox by introducing a new relaxation parameter. This has been done recently in several mechanical situations [1,2,3,4, 9,10,11, 15,16,17, 20, 22, 23].
In this paper, we want to propose a thermoviscoelastic theory written (only) as partial differential equations in such a way that the thermomechanical waves propagate with finite speed. It is worth noting that this fact was previously proposed in the paper by Conti et al. [8], but, in this case, the authors modified both effects by means of the same parameter. This assumption is consistent, but we can agree that it is also very restrictive. For this reason, in this work we assume that (in the general case) the time relaxation for the thermal and mechanical effects are different. This assumption proposes a new mathematical difficulty since we have to handle with the coupling terms which introduce big mathematical problems. That is, from the mathematical point of view, we are in front of two equations (or systems) of the MGT-type, with different time relaxation parameters, which bring to new coupling terms. In this situation, we are going to be able to prove the existence and uniqueness of solutions, as well as the exponential stability (for the one-dimensional case) whenever the difference between the relaxation parameters is not very large in comparison with the remaining parameters proposed in the problem (see condition (4.1)).
The plan of this paper is the following. The model equations and the assumptions required on the constitutive tensors are presented in Sect. 2. The one-dimensional version of this problem is also recalled. Then, in Sect. 3 the existence and uniqueness of solution to the multi-dimensional problem is proved by using the theory of linear semigroups. The exponential decay of the solutions is shown in Sect. 4 when the problem is assumed one-dimensional. Later, by using the classical finite element method and the implicit Euler scheme, a fully discrete approximation is introduced in Sect. 5. A priori error estimates are obtained, and the linear convergence is derived under some additional regularity conditions on the continuous solution. Finally, some one-dimensional numerical simulations are presented in Sect. 6 to demonstrate the numerical convergence, the behavior of the discrete energy decay and the dependence on the coupling parameter.
2 Basic equations
The aim of this section is to propose the basic equations governing the general theory of MGT-thermoviscoelasticity. We are going to consider a bounded region \(B\subset \mathbb {R}^d\), \(d=1,2,3\), with boundary smooth enough to apply the divergence theorem. In this sense, it is worth recalling that the evolution equations are
Here, \(u_i\) is the displacement, \(\rho \) is the mass density, \(t_{ij}\) is the stress tensor, \(T_0\) is the temperature (assumed to be uniform) in the reference configuration but, from now on, we will assume equal to one, \(\eta \) is the entropy and \(q_i\) is the heat flux vector.
The constitutive equations are given by
where
\(\alpha \) is the thermal displacement, \(\theta =\dot{\alpha }\) is the temperature, \(\tau _1\) and \(\tau _2\) are two positive constants, \(K_{ij}\) is the thermal conductivity, \(C_{ijrs}^*\) is the elasticity tensor and \(C_{ijkl}\) is the viscosity, c is the thermal capacity and \(K_{ij}^*\) is a tensor which is typical of the works related with the Green and Naghdi thermoelastic theories [12, 13].
We impose the following symmetries on the previous tensors:
After substitution of the constitutive equations into the evolution equations, we obtain the following systemFootnote 1:
We note that this coupling is new in the mathematical studies.
We will consider this system of equations with homogeneous Dirichlet boundary conditions
and imposing the initial conditions, for a.e. \({\varvec{x}}\in B\),
Sometimes, it is useful working with the homogeneous one-dimensional case. In this situation, our system of equations becomes:
In order to make the calculations easier, in this case we assume that the boundary conditions are:
where now the one-dimensional domain is taken as \(B=(0,\pi )\).
We note that the last equation in the system of equations (2.1) can be written as
Therefore, the one-dimensional case becomes:
We note that we can write the following equality:
where
with \(\overline{C}_{ijrs}=C_{ijrs}-\tau _1 C^*_{ijrs}\) and \(\overline{K}_{ij}=K_{ij}-\tau _1 K^*_{ij}\).
In view of equality (2.6), it will be natural to assume that
-
(i)
\(\rho ({\varvec{x}})\ge \rho _0 >0\) and \(c({\varvec{x}})\ge c_0>0\).
-
(ii)
\(C_{ijrs}^*\) and \(K_{ij}^*\) are positive definite tensors. That is, there exist two positive constants C and K such that
$$\begin{aligned} C_{ijrs}^*\xi _{ij}\xi _{rs}\ge C\xi _{ij}\xi _{ij}\quad \hbox {and}\quad K_{ij}^*\eta _i\eta _j\ge K\eta _i\eta _i \end{aligned}$$for every tensor \(\xi _{ij}\) and vector \(\eta _i\).
-
(iii)
\(\overline{C}_{ijrs}\) and \(\overline{K}_{ij}\) are positive definite tensors. That is, there exist two positive constants \(C_1\) and \(K_1\) such that
$$\begin{aligned} \overline{C}_{ijrs}\xi _{ij}\xi _{rs}\ge C_1\xi _{ij}\xi _{ij}\quad \hbox {and}\quad \overline{K}_{ij}\eta _i\eta _j\ge K_1\eta _i\eta _i \end{aligned}$$for every tensor \(\xi _{ij}\) and vector \(\eta _i\).
We also assume that \(\tau _1\ge \tau _2\).
We note that, for the one-dimensional homogeneous case, we can write the above assumptions as follows:
- (i\(^*\)):
-
\(\rho >0\), \(c>0\), \(C^*>0\), \(\overline{C}>0\), \(K^*>0\), \(\overline{K}>0\).
The meaning of condition (i) is obvious. Condition (ii) can be interpreted in the context of the mathematical theory of thermoelastic stability. They are usually imposed. Condition (iii) guarantees that we will have mechanical and thermal dissipation.
3 Existence of solutions
In this section, we propose an existence and uniqueness result for the solutions to the problem defined by system (2.1) with the modified equation (2.5), the boundary conditions (2.2) and the initial conditions (2.3).
We will work on the Hilbert space:
Here, \(W_0^{1,2}(B)\) and \(L^2(B)\) are the usual Sobolev spaces, and \({\varvec{L}}^2(B)=[L^2(B)]^d\) and \({\varvec{W}}_0^{1,2}(B)=[W_0^{1,2}(B)]^d\)
In this space \(\mathcal {H}\), we will consider the inner product defined as
where \(U=(u_i,v_i,a_i,\alpha ,\theta ,\phi )\), \(U^*=(u_i^*,v_i^*,a_i^*,\alpha ^*,\theta ^*,\phi ^*)\) and the bar over an element of the Hilbert space represents its complex conjugated.
In this situation, we can write our problem defined by system (2.1) with the modified equation (2.5), the boundary conditions (2.2) and the initial conditions (2.3) as the following Cauchy problem:
where the matrix operator \(\mathcal {A}\) is defined as
In this matrix operator, the elements are given by
The domain of the operator \(\mathcal {A}\) is made by the elements \(U\in \mathcal {H}\) satisfying \(\mathcal {A}U\in \mathcal {H}\). In fact, we note that it is subspace of elements \(U\in \mathcal {H}\) such that
It is clear that it is a dense subspace of the Hilbert space \(\mathcal {H}\). At the same time, we can obtain the following properties.
Lemma 3.1
There exists a positive constant L such that
for every \(U\in Dom(\mathcal {A}).\)
Proof
If we recall the energy equality (2.6), it is straightforward to see that the relation (3.2) holds. \(\square \)
Lemma 3.2
Zero belongs to the resolvent of operator \(\mathcal {A}\).
Proof
Given \(\mathcal {F}=({\varvec{f}}_1,{\varvec{f}}_2,{\varvec{f}}_3,f_4,f_5,f_6)\in \mathcal {H}\), we need to prove that the equation
has a solution. We obtain the system:
from which, after easy algebraic manipulations, we conclude that we must solve the simpler system:
It is straightforward to see that the right-hand side of the previous system is in \({\varvec{W}}^{-1,2}(B)\times W^{-1,2}(B).\)
In view of the assumptions on \(C_{ijkl}^*\) and \(K_{ij}^*\), we obtain that this system admits a solution in the space \({\varvec{W}}^{-1,2}(B)\times W^{-1,2}(B).\) \(\square \)
From Lemmas 3.1 and 3.2, we can prove that \(\mathcal {A}\) generates a quasi-contractive semigroup by using the Lumer–Phillips corollary applied to Hille–Yosida theorem. Therefore, problem (3.1) has a unique solution. This is obtained in the following result.
Theorem 3.3
The operator \(\mathcal {A}\) generates a \(C^0\)-semigroup of contractions in the space \(\mathcal {H}\). Moreover, for any initial data U(0) in the domain of the operator \(\mathcal {A}\), we conclude that there exists at least one solution to Cauchy problem (3.1) with the regularity:
Remark 3.4
It is possible to obtain an existence result under more general assumptions. Even if we could extend this comment to the non-homogeneous case, we now assume that the material is homogeneous. Indeed, we also have the equality:
where
and \(l_{ij}=K_{ij}-\tau _2K_{ij}^*\).
In view of this equality, under the assumption proposed previously and that \(l_{ij}\) is a positive definite tensor, we can define the inner product in \(\mathcal {H}\):
In this case, we can see that there exists a positive constant \(L_1\) such that
but we do not need the assumptions required above. Again, the domain is dense and we can also prove that zero belongs to the resolvent of this operator \(\mathcal {A}\). Therefore, we can obtain the existence of solutions under the assumptions (i)–(iii), but changing the condition on \(\overline{K}_{ij}\) by \(l_{ij}\), which is a weaker condition.
4 One-dimensional case
In this section, we restrict our analysis to the one-dimensional homogeneous case.
If we define the inner product
we have
Therefore, if we assume that the bilinear form given by the matrix
is positive definite we conclude that \(\textrm{Re} \langle \mathcal {A}U,U\rangle \le 0\) for every \(U\in \textrm{Dom}(\mathcal {A}).\)
Remark 4.1
Matrix (4.1) is positive definite if and only if the following conditions hold:
We see that whenever \(\tau _1-\tau _2\) is small enough, the previous conditions hold.
It is worth noting that, under the assumptions proposed in this section, we can prove that zero belongs to the resolvent of the operator.
Therefore, we have shown the following.
Theorem 4.2
Under the previous assumptions (i\(^*\)) and that the matrix (4.1) is positive definite, the solutions decay in an exponential way.
Proof
Since the semigroup is contractive, we can use the semigroup theory of linear operators as well as the characterization of the exponentially stable semigroups obtained by Pruss (and other authors), which can be recalled in the book of Liu and Zheng [18]. Therefore, in order to prove the theorem it is sufficient to show that the imaginary axis is contained in the resolvent of the operator \(\mathcal {A}\) and that the asymptotic condition
holds.
We will prove the first condition. In the case that this is not fulfilled, there exist a sequence of real numbers \(\lambda _n\rightarrow \lambda \ne 0\) and a sequence of unit norm vectors \(U_n=(u_n,v_n,a_n,\alpha _n,\theta _n,\phi _n)\) such that
In view of the assumption on the dissipation D(t), we have that
and therefore,
If we multiply the above third convergence by \(v_n\), we also obtain that \(a_n\rightarrow 0\) in \(L^2(B)\). This is a contradiction because we assumed that \(U_n\) were unit norm vectors.
To prove the asymptotic condition, we can use a similar argument. \(\square \)
5 A fully discrete scheme: a priori error estimates
In this section, we will introduce a fully discrete approximation of the problem defined by system (2.1), boundary conditions (2.2) and initial conditions (2.3) over a finite time interval [0, T], \(T>0\). First, we need to write this problem in its variational form. Therefore, let us denote \(Y=L^2(B)\), \(H=[L^2(B)]^d\), \(E=H^1_0(B)\) and \(V=[H^1_0(B)]^d\). Moreover, for a Hilbert space X, let \((\cdot ,\cdot )_X\) and \(\Vert \cdot \Vert _X\) be the inner product and norm in X, respectively.
Therefore, multiplying the equations of system (2.1) by adequate test functions belonging to the spaces V and E, respectively, and using boundary conditions (2.2), we obtain the following variational formulation of this thermo-mechanical problem, written in terms of the acceleration \({\varvec{a}}(t)=(a_i(t))\), the thermal acceleration \(\phi (t)\), the velocity \({\varvec{v}}(t)=(v_i(t))\) and the temperature \(\theta (t)\).
Find the acceleration \({\varvec{a}}:[0,T]\rightarrow V\) and the thermal acceleration \(\phi :[0,T]\rightarrow E\) such that \({\varvec{a}}(0)={\varvec{a}}^0\), \(\phi (0)=\phi ^0\),and for a.e. \(t\in (0,T)\) and \({\varvec{w}}\in V,\, \xi \in E\),
where the operators \({\varvec{C}}\), \({\varvec{C}}^*\), \(\mathcal {K}\) and \(\mathcal {K}^*\) are given by
and the velocity \({\varvec{v}}(t)\), the temperature \(\theta (t)\), the displacements \({\varvec{u}}(t)\) and the thermal displacements \(\alpha (t)\) are recovered from the relations:
Now, we introduce a fully discrete approximation of problem (5.1)–(5.2). We will proceed in two steps. First, we approximate the problem in space. Thus, let us assume that \(\overline{B}\) is a polyhedral domain and construct the finite element spaces:
where \(\mathcal {T}^h\) is a regular finite element triangulation of the domain \(\overline{B}\) (in the sense of [7]), and \(P_1(Tr)\) represents the space of affine functions in Tr. Moreover, as usual, parameter \(h>0\) denotes the mesh size.
The discrete initial conditions \({\varvec{u}}^{0h}\), \({\varvec{v}}^{0h}\), \({\varvec{a}}^{0h}\), \(\alpha ^{0h}\), \(\theta ^{0h}\) and \(\phi ^{0h}\) are approximations of the respective initial conditions \({\varvec{u}}^{0}\), \({\varvec{v}}^{0}\), \({\varvec{a}}^{0}\), \(\alpha ^{0}\), \(\theta ^{0}\) and \(\phi ^{0}\) defined as
Here, we denote by \(\mathcal {P}_1^{h}\) and \(\mathcal {P}_2^{h}\) the interpolation operators over the finite element spaces \(V^h\) and \(E^h\), respectively (see, again, [7]).
Secondly, in order to provide the time discretization, we consider a uniform partition of the time interval [0, T], denoted by \(0=t_0<t_1<\cdots <t_N=T\), where \(k=T/N\) is the time step size. If f is a continuous function, we denote \(f_n=f(t_n)\) and, for the sequence \(\{z_n\}_{n=0}^N\), let \(\delta z_n=(z_n-z_{n-1})/k \) be its divided differences.
Therefore, using the well-known implicit Euler scheme we can introduce the following fully discrete problem.
Find the discrete acceleration \({\varvec{a}}^{hk}=\{{\varvec{a}}_n^{hk}\}_{n=0}^N\subset V^h\) and the discrete thermal acceleration \(\phi ^{hk}=\{\phi _n^{hk}\}_{n=0}^N\subset E^h\) such that \({\varvec{a}}_0^{hk}={\varvec{a}}^{0h}\), \(\phi _0^{hk}=\phi ^{0h}\), and for all \(n=1,\ldots ,N\) and \({\varvec{w}}^h\in V^h,\, \xi ^h\in E^h\),
where the discrete velocity \({\varvec{v}}_n^{hk}\), the discrete temperature \(\theta _n^{hk}\), the discrete displacements \({\varvec{u}}_n^{hk}\) and the discrete thermal displacements \(\alpha _n^{hk}\) are updated from the relations:
Using assumptions (i)–(iii) and applying Lax–Milgram lemma, it is easy to prove that the above discrete problem has a unique solution.
In the rest of the section, we will obtain some a priori error estimates on the numerical errors \({\varvec{a}}_n-{\varvec{a}}_n^{hk}\) and \(\phi _n-\phi _n^{hk}\), which we state in the following result.
Theorem 5.1
Let the assumptions (i)–(iii) hold. If we denote by \(({\varvec{u}},{\varvec{v}},{\varvec{a}},\alpha ,\theta ,\phi )\) the solution to problem (5.1)–(5.2) and by \(({\varvec{u}}^{hk},{\varvec{v}}^{hk},{\varvec{a}}^{hk},\alpha ^{hk},\theta ^{hk},\phi ^{hk})\) the solution to problem (5.5)–(5.6), then we have the following a priori error estimates, for all \(\{{\varvec{w}}_n^{h}\}_{n=0}^N\subset V^h,\, \{\xi _n^{h}\}_{n=0}^N\subset E^h\),
where C is a positive constant which does not depend on parameters h and k, and the integration errors \(I_j^1\) and \(I_j^2\) are defined as
Proof
In this proof, in order to simplify the calculations, we will consider that \(\tau _1=\tau _2=1\). We note that we can modify the arguments used below to the general case with some minor changes.
First, we will obtain the error estimates on the acceleration term \({\varvec{a}}_n-{\varvec{a}}_n^{hk}\). Thus, we subtract variational equation (5.1)\(_1\) for a test function \({\varvec{w}}={\varvec{w}}^h\in V^h\subset V\), at time \(t=t_n\), and discrete variational equation (5.5)\(_1\) to find that
Therefore, it follows that, for all \({\varvec{w}}^h\in V^h\),
Taking into account that
where we have used assumptions (i)–(iii), applying several times Cauchy–Schwarz inequality and Cauchy’s inequality \(ab\le \epsilon a^2+\frac{1}{4\epsilon }b^2\), \(a,b,\epsilon \in \mathbb {R}\) with \(\epsilon >0\), we obtain the following error estimates for the acceleration terms:
where, here and in what follows, C will represent a positive constant which depends on the constitutive tensors and coefficients, but it does not depend on the discretization parameters h and k, and whose value may change even within the same line.
Now, we obtain the error estimates on the thermal acceleration term \(\phi _n-\phi _n^{hk}\). Subtracting variational equation (5.1)\(_2\), for a test function \(\xi =\xi ^h\in E^h\subset E\) at time \(t=t_n\), and discrete variational equation (5.5)\(_2\) it follows that
Therefore, we obtain that, for all \(\xi ^h\in E^h\),
Keeping in mind that
we have, for all \(\xi ^h\in E^h,\)
Combining estimates (5.8) and (5.9) and taking into account that
we find that, for all \({\varvec{w}}^h\in V^h,\, \xi ^h\in E^h\),
Multiplying the above estimates by k and summing up to n, we have, for all \(\{{\varvec{w}}_j^h\}_{j=1}^n\subset V^h, \, \{\xi _j^h\}_{j=1}^n\subset E^h\),
We note that it is easy to prove that
where \(I_j^1\) and \(I_j^2\) are the integration errors defined in (5.7).
Thus, using a discrete version of Gronwall’s inequality (see [5]) we conclude the desired a priori error estimates. \(\square \)
We note that we can use the above a priori error estimates to derive the convergence order of the approximations under additional regularity conditions on the continuous solution. Therefore, if we assume that
we obtain the following.
Corollary 5.2
Under the additional regularity conditions (5.10) and the assumptions of Theorem 5.1, we find that the approximations obtained by problem (5.5)–(5.6) are linearly convergent; that is, there exists a positive constant C, independent of the discretization parameters h and k, such that
6 Numerical results
In this final section, we present the numerical scheme implemented in MATLAB for solving problem (5.5)–(5.6), and we show some numerical examples to demonstrate the accuracy of the approximations, the behavior of the discrete energy decay and the dependence on the coupling coefficient \(\beta \).
6.1 Numerical scheme for the one-dimensional problem
As a first step, given the solution \(u_{n-1}^{hk}\), \(v_{n-1}^{hk}\), \(a_{n-1}^{hk}\), \(\alpha _{n-1}^{hk}\), \(\theta _{n-1}^{hk}\) and \(\phi _{n-1}^{hk}\) at time \(t_{n-1}\), variables \(a_{n}^{hk}\) and \(\phi _{n}^{hk}\) are obtained by solving the discrete linear system, for all \(w^h,\, \xi ^h\in V^h\).
This numerical scheme was implemented on a 3.2 GHz PC using MATLAB, and a typical run (using parameters \(h=k=0.001\)) took about 0.17 s of CPU time
6.2 First example: numerical convergence
As a first simpler example, in order to show the accuracy of the approximations the following problem is considered over the domain \(B=(0,1)\).
with the following data:
By using the following initial conditions, for all \(x\in B=(0,1)\),
considering homogeneous Dirichlet boundary conditions and the (artificial) supply terms, for all \((x,t)\in (0,1)\times (0,1)\),
the exact solution to the above one-dimensional problem can be easily calculated and it has the form, for \((x,t)\in [0,1]\times [0,1]\):
Therefore, the approximation errors estimated by
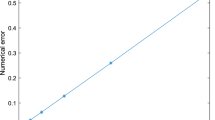
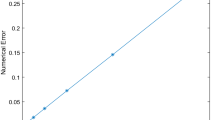
are presented in Table 1 for several values of the discretization parameters h and k. Moreover, the evolution of the error depending on the parameter \(h+k\) is plotted in Fig. 1. We notice that the convergence of the algorithm is clearly observed, and the linear convergence, stated in Corollary 5.2, is achieved.

Example 1: Asymptotic constant error

Example 1: Evolution in time of the discrete energy (natural and semi-log scales)

Example 2: Displacement, velocity and acceleration for different values of \(\beta \)

Example 2: Thermal displacement, temperature and thermal acceleration for different values of \(\beta \)
If we assume that there are not supply terms, and we use the final time \(T=500\), the data
and the initial conditions:
taking the discretization parameters \(h=k=0.001\), the evolution in time of the discrete energy given by
is plotted in Fig. 2 (in both natural and semi-log scales). As it is demonstrated in this figure, it converges to zero and an exponential decay seems to be achieved.
6.3 Second example: Dependence of the solution on parameter \(\beta \)
In this last example, we address the dependence of the solution to problem (5.1)–(5.2) on the coupling parameter \(\beta \).
We assume that there are not supply terms, and we use following data:
and the initial conditions:
Then, taking the discretization parameters \(h=0.001\) and \(k=0.001\), we plot the solution to problem (5.5)–(5.6) in Figs. 3 and 4 for some values of parameter \(\beta \). As can be seen in Fig. 3, the displacements and velocities are rather similar for all the values but, if we focus on the accelerations, some oscillations appear for the largest value of the parameter.
In Fig. 4, as expected we can see a big dependence on the value of the parameter. The reason is that these thermal displacements are produced by the deformation and so, they increase when the value of the coupling coefficient is greater.
References
Abouelregal, A.E., Ahmad, H., Nofal, T.A., Abu-Zinadah, H.: Moore–Gibson–Thompson thermoelasticity model with temperature-dependent properties for thermo-viscoelastic orthotropic solid cylinder of infinite length under a temperature pulse. Phys. Scr. 96, 105201 (2021)
Baldonedo, J., Fernández, J.R., Quintanilla, R.: Time decay for porosity problems. Math. Methods Appl. Sci. 45(8), 4567–4577 (2022)
Bazarra, N., Fernández, J.R., Quintanilla, R.: On the MGT-micropolar viscoelasticity. Mech. Res. Commun. 124, 103948 (2022)
Bazarra, N., Fernández, J.R., Quintanilla, R.: On the mixtures of MGT viscoelastic solids. Electron. Res. Arch. 30(12), 4318–4340 (2022)
Campo, M., Fernández, J.R., Kuttler, K.L., Shillor, M., Viano, J.M.: Numerical analysis and simulations of a dynamic frictionless contact problem with damage. Comput. Methods Appl. Mech. Eng. 196(1–3), 476–488 (2006)
Cattaneo, C.: On a form of heat equation which eliminates the paradox of instantaneous propagation. C. R. Acad. Sci. Paris 247, 431–433 (1958)
Ciarlet, P.G.: The Finite Element Method for Elliptic Problems. Handbook of Numerical Analysis, vol. II, pp. 17–352. North-Holland (1991)
Conti, M., Pata, V., Pellicer, M., Quintanilla, R.: A new approach to MGT thermoviscoelasticity. Discrete Contin. Dyn. Syst. 41, 4645–4666 (2021)
Fernández, J.R., Magana, A., Quintanilla, R.: Decay of waves in strain gradient porous elasticity with Moore–Gibson–Thompson dissipation. Phil. Trans. R. Soc. A 380, 20210369 (2022)
Fernández, J.R., Quintanilla, R.: Moore–Gibson–Thompson theory for thermoelastic dielectrics. Appl. Math. Mech.-Engl. Ed. 42, 309–316 (2021)
Fernández, J.R., Quintanilla, R.: On a mixture of an MGT viscous material and an elastic solid. Acta Mech. 233, 291–297 (2022)
Green, A.G., Naghdi, P.M.: On undamped heat waves in an elastic solid. J. Therm. Stress. 15, 253–264 (1992)
Green, A.G., Naghdi, P.M.: Thermoelasticity without energy dissipation. J. Elast. 31, 189–208 (1993)
Gurtin, M.E.: Time-reversal and symmetry in the thermodynamics of materials with memory. Arch. Ration. Mech. Anal. 44, 387–399 (1972)
Jangid, J., Mukhopadhyay, S.: A domain of influence theorem under MGT thermoelasticity theory. Math. Mech. Solids 26, 285–295 (2020)
Jangid, M., Gupta, K., Mukhopadhyay, S.: On propagation of harmonic plane waves under the Moore–Gibson–Thompson thermoelasticity theory. Waves Random Complex Media (in Press) (2022)
Kumar, H., Mukhopadhyay, S.: Thermoelastic damping analysis in microbeam resonators based on Moore–Gibson–Thompson generalized thermoelasticity theory. Acta Mech. 231, 3003–3015 (2020)
Liu, Z., Zheng, S.: Semigroups Associated with Dissipative Systems. Chapman and Hall, Boca Raton (1999)
Lord, H.W., Shulman, Y.: A generalized dynamical theory of thermoelasticity. J. Mech. Phys. Solids 15, 299–309 (1967)
Pellicer, M., Quintanilla, R.: On uniqueness and instability for some thermomechanical problems involving the Moore–Gibson–Thompson equation. Z. Angew. Math. Phys. 71, 84 (2020)
Quintanilla, R.: Moore–Gibson–Thompson thermoelasticity. Math. Mech. Solids 24, 4020–4031 (2019)
Singh, B., Mukhopadhyay, S.: Galerkin-type solution for the Moore–Gibson–Thompson thermoelasticity theory. Acta Mech. 232, 1273–1283 (2021)
Singh, R.V., Mukhopadhyay, S.: Study of wave propagation in an infinite solid due to a line heat source under Moore–Gibson–Thompson thermoelasticity. Acta Mech. 232, 4747–4760 (2021)
Funding
Open Access funding provided thanks to the CRUE-CSIC agreement with Springer Nature. This paper is part of the project PID2019-105118GB-I00, funded by the Spanish Ministry of Science, Innovation and Universities and FEDER “A way to make Europe.”
Author information
Authors and Affiliations
Contributions
The three authors have contributed equally to this manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bazarra, N., Fernández, J.R. & Quintanilla, R. A MGT thermoelastic problem with two relaxation parameters. Z. Angew. Math. Phys. 74, 197 (2023). https://doi.org/10.1007/s00033-023-02080-z
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00033-023-02080-z
Keywords
- MGT-thermoelasticity
- Relaxation parameters
- Linear semi-groups
- Exponential decay
- Finite elements
- A priori error estimates