
Abstract
This article addresses several problems that are related to the elastic stability of thin shells and that are due to inconsistencies between the experimental data and predictions based on the equations of the shallow-shell theory. The above contradictions are solved within the three-dimensional nonlinear theory of elasticity. In particular, the dynamic approach enables a prediction of the moment of bifurcation for very thin shells under momentless stress through the analysis of asymptotically built two-dimensional equations. Appearance and development of the dents and patterns in initially ideal shells that precede the buckling are also explained in this article. The dents represent solitonic waves that are detectible by acoustic devices. Therefore, it is possible to reduce the risk of failure of thin shells by using acoustic devices to monitor their conditions. The article covers two types of experiments with thin shells when the loads are close to buckling. These experiments enable to assess the safety buckling factor under technical operation of shells.








Similar content being viewed by others


References
Hilburger, M.W., Waters, W.A., Haynie, W.T: Buckling Test Results from the 8 Foot Diameter Orthogrid Stiffened Cylinder Test Article TA01, NASA/TP2015218785 (2015)
Virot, E., Kreilos, T., Schneider, T.M., Rubinstein, S.M.: Stability landscape of shell buckling. Phys. Rev. Lett. 119, 224101 (2017)
Karman, T., Tsien, H.S.: The buckling of cylindrical shells under axial compression. J. Aeron. Soc. 8(8), 303–312 (1941)
Vorovich, I.I.: Nonlinear Theory of Shallow Shells. English Edition edited by LP.Lebedev. Translated by M. Grinfeld. Springer, New York (1999)
Singer, J., Arbocz, J., Weller, T.: Experimental Methods in Buckling of Thin-Walled Structures (2 volumes). Wiley, Chichester (1998–2002)
Marthelot, J., Jiménez, F.L., Lee, A., Hutchinson, J.W., Reis, P.M.: Buckling of a pressurized hemispherical shell subjected to a probing force. J. Appl. Mech. 84(12), 121005 (2017)
Truesdell, C.: A First Course in Rational Continuum Mechanics. Academic Press, New York (1977)
Hutchinson, J.W.: Buckling of spherical shells revisited. Proc. R. Soc. A472(2195), 20160577 (2016)
Pogorelov, A.V.: Bending of Surfaces and Stability of Shells. American Mathematical Society, Providence (1988)
Ciarlet, P.G., Iosifescu, O.: Nonlinear Donati compatibility conditions on a surface-application to the intrinsic approach for Koiter’s model of a nonlinearly elastic shallow shell. Math. Models Methods Appl. Sci. 27, 347–384 (2017)
Ciarlet, P.G., Mardare, M.: A nonlinear shell model of Koiter’s type. C. R. Acad. Sci. Paris Ser. I356, 227–234 (2018)
Timoshenko, S.P., Gere, J.M.: Theory of Elastic Stability, 2nd edn. Mcgraw-Hill, New York (1961)
Zoelly, R.: Ueber ein Knickungsproblem an der Kugelschale. Buchdr, Zürcher and Furrer, Zürich (1915)
Volmir, A.S.: Stability of Elastic Systems. Moscow, Nauka. English Translation. Wright-Patterson Air Force Base, Ohio: Foreign Technology, Division Air Force Systems Command (1965)
Whitham, G.B.: Linear and Nonlinear Waves (Pure and Applied Mathematics). Wiley, New York (1974)
Koiter, W.T.: Un the Stability of Elastic Equilibrium, vol. 10. Dissertation. Delft 1945, TechnTrans. NASA (1967)
Ciarlet, P.G.: Mathematical Elasticity: Three-Dimensional Elasticity, vol. 1. North Holland, Amsterdam (1988)
Sedov, L.I.: Similarity and Dimensional Methods in Mechanics, 10th edn. CRC Press, London (1993)
Kiselev, V.V., Dolgikh, D.V.: Non-linear Patterns of Dents on Surfaces of Plates and Shells Under Load. Phizmatlit, Moscow (2012) (in Russian)
Novozhilov, V.V.: Theory of Elasticity. Pergamon Press, Oxford (1961)
Steigmann, D.: Koiter’s shell theory from the perspective of three-dimensional nonlinear elasticity. J. Elast. 111(1), 91–107 (2013)
Ablowitz, M.J., Segur, H.: Solitons and Inverse Scattering Transform (SIAM Studies in Applied Mathematics, No. 4). Society for Industrial and Applied Mathematics, Philadelphia (1988)
Wu, J., Wheatley, J., Putterman, S., Rudnick, I.: Observation of envelope solitons in solids. Phys. Rev. Lett. 59(24), 2744–2747 (1987)
Maugin, G.A.: Solitons in elastic solids (1938–2010). Mech. Res. Commun. 38(5), 341–349 (2011)
Erofeev, V.I., Klyueva, N.V.: Solitons and nonlinear periodic strain waves in rods, plates and shells (a review). Acoust. Phys. 48(6), 725–740 (2002) (in Russian)
Samsonov, A.M.: Strain Solitons in Solids and How to Construct Them. Chapman & Hall/CRC, Boca Raton (2011)
Remoissenet, M.: Waves Called Solitons: Concepts and Experiments (Advanced Texts in Physics), 3rd edn. Springer, Berlin (2003)
Lomonosov, A.M., Pupyrev, P.D., Hess, P., Mayer, A.P.: Nonlinear one-dimensional guided wedge waves. Phys. Rev. B 92, 014112 (2015)
Thomson, J.M.T.: Advances in Shell Buckling: Theory and Experiments. arXiv:1409.3156 (2014)
Fermi, E., Pasta, J., Ulam, S.: Studies of nonlinear problems. Los-Alamos scientific report, LA-(1940, 1955). Collected works of Enrico Fermi, vol. 2, pp. 977–988. University of Chicago Press, Chicago (1965)
Zabusky, N.J., Kruskal, M.D.: Interaction of “solitons” in a collisionless plasma and recurrence of initial states. Phys. Rev. Lett. 15, 240–243 (1965)
Fermi–Pasta–Ulam Problem—Non-Linear Chain Simulation.https://www.youtube.com/watch?v=0bn6kSMEXm4 (2014)
Guo, B., Pang, X.F., Wang, Y.F., Liu, N.: Solitons. Walter de Gruyter GmbH, Berlin (2018)
Ball, J.M.: Convexity conditions and existence theorems in nonlinear elasticity. Arch. Ration Mech. Anal. 63, 337–403 (1977)
Miroshnikov, A., Tzavaras, A.A.: Variational approximation scheme for radial polyconvex, elasticity that preserves the positivity of Jacobians. Comm. Math. Sci. 10(1), 87–115 (2012)
Ciarlet, P.G., Geymonat, G., Krasucki, F.: A new duality approach to elasticity. Math. Models Methods Appl. Sci. 22, 1150003 (2012)
Ciarlet, P.G., Mardare, C.: Boundary conditions in intrinsic nonlinear elasticity. J. Math. Pures Appl. 101, 458–472 (2014)
Savenkova, N.P., Laponin, V.S.: A numerical method for finding soliton solutions in nonlinear differential equations. Mosc. Univ. Comput. Math. Cybern. 37(2), 49–54 (2013)
Menza, L.D.: Numerical computation of solitons for optical systems. Math. Model. Numer. Anal. 43, 173–208 (2009)
Wen, X.-Y., Yan, Z., Yang, Y.: Dynamics of higher-order rational solitons for the nonlocal nonlinear Schrodinger equation with the self-induced parity-time-symmetric potential. https://arxiv.org/pdf/1704.02554.pdf (2017)
Wang, L., Li, S, Qi, F.-H.: Breather-to-soliton and rogue wave-to-soliton transitions in a resonant erbium-doped fiber system with higher-order effects. https://arxiv.org/pdf/1602.00077.pdf (2016)
Xiaojun, W., Zhiping, Q.: Interval finite element analysis of wing flutter. Chin. J. Aeronaut. 21, 134–140 (2008)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A: Deduction and the solving of equations (14) and (16)
Appendix A: Deduction and the solving of equations (14) and (16)
Below are major considerations that lead to Eqs. (14) and (16). The details are presented in chapters 3 and 4 of the book [18]. In addition to designations (12) in the main text, the following two small parameters are introduced:
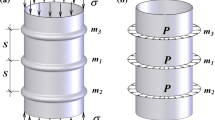
Letter a designates the amplitude of the appearing dent, and the constraint \(l\ll L\) shall be taken into consideration. Symbol \(O\) represents an order of magnitude. The external stresses \(\Theta ^{11}\) are applied only along the edges of the shells, as follows:
Equations (7)–(11) of the three-dimensional theory of elasticity are tried for any values of \(\xi _{i},\eta \). The boundary conditions on the edges are met only approximately in the sense of Saint-Venant. Therefore, further analysis is applicable to very long, thin cylinders when the effect of the fixation is spread over a small area (the boundary effect). The dynamic equations (10) take the following form in dimensionless variables:
Critical stress when buckling occurs within the linearized theory of shells (4) is designated as \(\Theta \). The states \(\Theta ^{11}\) close to \(\Theta \) are analyzed when the following constraint is satisfied:
Let us introduce dimensionless parameters \(X_{\alpha } = \varepsilon ^{1/2}\xi _{\alpha }, T = \varepsilon ^{3/2}\tau \) and complex variables:
The processes that are similar to static loading are also considered, i.e.,:
The assumptions that are made enable us to present the stresses and strains in the following way:
The stresses and strains are connected with formulas (11), and the connection between \(u^{(nl)},w^{(nl)}\) and \(E^{(nl)}_{sm}\) is defined by formula (7), because
In Eq. (A.2), the functions in the series with indices \(n, l\) depend on one fast variable \(\eta \) and two slow variables \(X,\xi \). By substituting decompositions (A.2) in (A.1) and equating the terms of the series with the same power of parameter \(\varepsilon \), we obtain a chain of ordinary differential equations relative to \(\eta \) and the boundary conditions on the surfaces of the shell. For instance, the following formulas can be written for the first order of the perturbation theory:
The laws of elasticity (9), (11) are used to integrate (A.4), while the components \(E_{sm}\) are calculated at the first approximation. Then, Eq. (A.3) are integrated. As a result, the formulas for displacement are derived at first the approximation and include the functions of variable \( \eta \) and the arbitrary functions of the slow variables \({\hat{u}}^{(n,l)}(X,T)\). The successive approximations are performed in the same manner so that the sequential search for nontrivial solutions can last infinitely. In addition, fast and slow variables remain in all approximations. However, in some cases, dimensionless parameters such as \(X,T\) can be selected; then, after a certain value of n, all further successive approximations contain only slow variables, while relevant functions \({\hat{u}}^{(n+2,l)}(X,T)\) satisfy some partial differential equations. The derived differential equations allow for nontrivial solutions that represent solitary waves (solitons). All of the functions after \({\hat{u}}^{(n+2,l)}(X,T)\) can be set to zero, and then, the series (13) is terminated. In principle, sometimes the asymptotic method gives an exact solution to the three-dimensional problem of the theory of elasticity, which is true for the definition domain of fast and slow variables. Such a solution was found in [14] for an axially loaded and sufficiently long cylindrical shell, when the slow variables are selected per formulas \(X_{\alpha }=\varepsilon ^{1/2}\xi _{\alpha }\) and \(T=\varepsilon ^{3/2}\tau \). The final results of the asymptotic calculations are as follows: when n=4, the series for the fast variables result in equations that are equivalent to (4). These equations define Euler’s critical load \(q_{cr}\). During further approximations, when n=6, solitons that depend on only slow variables and satisfy system (14) were observed. The updated values of the critical load \(\Theta ^{11(3)}\) and parameter \(r_{0}\) are defined by the following equations:
where \(\alpha _{i}, i=1,2,3 \) are the roots of the cubic equation
Function K(k) is a complete elliptic integral of the first order, and parameter \(\delta \) must satisfy the following constraint:
The critical load within the three-dimensional theory of elasticity is calculated per (A.5) as a minimum number \(\Theta ^{11(3)}\)) when \( \delta \) is governed by inequalities (A.6). The numerical estimate shows that the critical value is 30–40% lower than Euler’s critical load. The similar asymptotic analysis is also true when the shell is under hydrostatic pressure \(p\). The resolving equation for the fast variables is written as (16). The formulas for the coefficients of this equation are as follows:
The critical load is defined under the additional constraint \(c > 0\), which is the case with axial loading; when nonlinear dynamic effects are taken into consideration, the value of the critical load is 30–40% lower than the one that is calculated by system (1).
In conclusion, we wish to emphasize that the previous analysis was possible only because an almost exact asymptotic solution to the problem that satisfied numerous constraints was found. A long, thin, shallow cylindrical shell was studied, the stressed state of which was momentless and equal in all points. The abandonment of any of the above mentioned assumptions and the search for solitonic solutions to thin-walled systems causes complex computational problems. Therefore, the combination of mathematical research and acoustic methods of shell monitoring seems to be the most reasonable method.
Rights and permissions
About this article

Cite this article
Neustadt, Y.S., Grachev, V.A. Buckling prognosis for thin elastic shallow shells. Z. Angew. Math. Phys. 70, 113 (2019). https://doi.org/10.1007/s00033-019-1151-x
Received:
Published:
DOI: https://doi.org/10.1007/s00033-019-1151-x
Keywords
- Elastic shells
- Buckling
- Three-dimensional nonlinear theory of elasticity
- Patterns and dents
- Acoustic inspections