
Abstract
The Gudermannian function relates the circular angle to the hyperbolic one when their cosines are reciprocal. Whereas both such angles are halved areas of circular and hyperbolic sectors, it is natural to develop similar considerations within the study of a class of curves images of maps with constant areal speed. After a brief exposition of some use of the Gudermannian in applied sciences, we proceed to illustrate the class of curves, called Keplerian curves, which can be parametrised by a map \({{\textbf{m}}}= (\cos _{{{\textbf{m}}}}, \sin _{{{\textbf{m}}}})\) whose areal speed is 1. In the next Sections, after a detailed study of p-circular and hyperbolic Fermat curves \(\mathscr {F}_p\) and \(\mathscr {F}^*_p\), we define the p-Gudermannian as the primitive of the derivative of the p-hyperbolic sine divided by the square of the p-hyperbolic cosine: all the analogues of the classical identities are proven. Having realised that such curves correspond to each other by means a homology, we extend our study to a wide class of Keplerian curves and their homologues; once again, defined the Gudermannian in an identical manner, all the analogues of classical identities subsist. Below, three examples are detailed. The last paragraph further extends this consideration, eliminating the hypothesis that the curves are parametrised by maps with areal speed 1. The Appendix illustrates integrating techniques for systems defining the Fermat curves and determining the inverse of their tangent function.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The Gudermannian is the mapping \({{\,\mathrm{\textrm{gd}}\,}}:{\mathbb {R}} \rightarrow \left]-\tfrac{\pi }{2},\,\tfrac{\pi }{2}\right[\) introduced by Christoph Gudermann (1798–1852):
It has particular popularity in basic Calculus because it naturally connects trigonometric functions with hyperbolic ones without referring to complex unity, since the integral computation yields:
The use of the Gudermannian in calculus and applications is detailed in several contributions of some interest [13, 22, 25]: it is used in geodesy, in cartography to study Mercator map projection, (see for instance [24]), in soliton theory [20], in neural networks [29] and in mathematical statistics, where some probability density functions are introduced, taking inspiration to the sigmoid shape of the function [2, 14].
The Gudermannian is a strictly increasing bounded function; its inverse, studied by John Heinrich Lambert (1728–1777), usually denoted “\({\text {lam}}\)” but here indicated with “\({{\,\mathrm{\textrm{dg}}\,}}\)”, is:
We point out that we have chosen here to use the notation “\({{\,\mathrm{\textrm{dg}}\,}}\)” for the inverse Gudermannian, rather then “\({{\,\mathrm{\textrm{gd}}\,}}^{-1}\)”, to avoid ambiguity and confusion since throughout the article, with powers minus 1, we mean the reciprocal. Inverse Gudermannian \({{\,\mathrm{\textrm{dg}}\,}}\) is applied in hyperbolic geometry [28].
The origin of interest in this function most probably stems from the fact that it appears in the approximate evaluation of elliptic integrals of the first kind obtained by applying the transformation, inspired by a geometric argument by John Landen, formalized in modern analytic terms by Adrien Marie Legendre [18, page 79], see also [30, chapter XVII], which reads as:
where
are elliptic integrals of the first kind, and where the transformation rules link moduli and amplitudes:
It follows that repeated applications of such transformation rules allow iterative schemes for evaluating elliptic integrals of the first kind as a result of the facts that \(0<k_0<1\implies k_1>k_0\) and \(\varphi _1<\varphi _0\) and due to the identity:
where sequences of moduli \(k_n\) and amplitudes \(\varphi _n\) are defined from the recurrence relationships
In this situation, \(\varphi _{n}\rightarrow 1\) as \(n\rightarrow \infty \), and the sequence of the amplitudes is also convergent, being decreasing and bounded from below by 0 (for details see section 19.8.16 of [21]). Thus, if \(\varphi \in (0,\pi /2)\) denotes the limit of the sequence of the amplitudes, the starting elliptic integral is evaluated as:
Hence, the connection with the inverse Gudermannian, as
Before the advent of computers, this approach was prevalent in the past to numerically evaluate elliptic integrals, e.g., [16].
2 Some Premises on the “Keplerian Environment”
We first point out that, unless explicitly mentioned, all the functions \({f} :{I} \rightarrow {\mathbb {R}}\) and maps \({\textbf{g}} = (x_{\textbf{g}},y_{{\textbf{g}}})\) considered here, are of class \({\mathcal {C}}^2\). We also add that, as usual, we indicate by \({{\textbf{i}}}\) and \({{\textbf{j}}}\) the unit vectors of the Euclidean basis of \({\mathbb {R}}^2\).
The signed area of the oriented parallelogram with sides \(\textbf{u}, \textbf{v}\) is computed by the wedge operation “\(\wedge \)”, defined by setting
The wedge operator “\({{\,\mathrm{\Lambda }\,}}\)”, instead, acts about a planar map \(\textbf{g} :\!{I} \rightarrow {\mathbb {R}}^2\) by producing the real function
In a previous paper [9], we presented the notion of Keplerian curve (or k-curve for short) as any simple smooth curve whose tangent lines avoid the origin O, that, in addition, contains the point \({\textbf{i}}\). The image \(\mathscr {G}\) of a given map \(\,{{\textbf{g}}} :{J} \rightarrow {\mathbb {R}}^2\) is a k-curve whenever conditions
are satisfied. From these conditions, we infer that the mapping \(y_{{\textbf{g}}}/x_{{\textbf{g}}}\), where is defined, has inverse, being strictly increasing, indeed:
Then, we are led to focus our attention on the family of maps \({{{\textbf{m}}}} :{K} \rightarrow {\mathbb {R}}^2\), where \(0 \in K\), satisfying the following stronger axioms:
For such maps, the parameter \(\kappa \) equals the measure of twice the area swept by the ray OP, in the movement of the point \(P={{\textbf{m}}}(\kappa )\) along the image \(\mathscr {M}:={{\textbf{m}}}(K)\), from the starting point \({{\textbf{i}}}\); therefore, any such map will be called a Keplerian map (or k-map for short) (Fig. 1).

Keplerian parameter
The variable of a Keplerian map will usually be denoted by the Greek letter \(\kappa \) and the domain with K; however, when a second k-map \({{\textbf{n}}}\) intervenes in the same context, its variable and its domain will be denoted by \(\tau \) and T.
Every k-curve \(\mathscr {M}\) is image of a unique k-map \({{\textbf{m}}}\), whose components will be denoted by \(\cos _{\mathscr {M}}\) and \(\sin _{\mathscr {M}}\). In this “Keplerian environment”, the tangent line to \(\mathscr {M}\) at point \((\cos _{\mathscr {M}}(\kappa ),\sin _{\mathscr {M}}(\kappa ))\) intercepts the axes in \((1/\sin '_{\mathscr {M}}(\kappa ),0)\), and \((0,-1/\cos '_{\mathscr {M}}(\kappa ))\), and therefore, it is consistent to define
In addition, we will set
with inverse \(\kappa =\arctan _{\mathscr {M}}(s)\). Note that
The most significant achievement in this topic consists of two propositions, for whose demonstration we refer to [9]; the first shows how the k-map of a k-curve can be computed by reversing the integral of the wedge of its some parametrisation; similarly, the second one illustrates that the k-map of an algebraically defined k-curve is the solution of a specific differential system.
Proposition 1
Let the map \({{\textbf{g}}} :{J} \rightarrow {\mathbb {R}}^2\) satisfy conditions (1); then the image \(\mathscr {G} :={\textbf{g}}(J)\) is a k-curve and its Keplerian map is:
where \(s(\kappa )\) is the inverse of the integral:
Proposition 2
Let the real polynomial p(x, y) satisfy conditions:
then the curve \(\mathscr {P} :=\{p(x,y)=1\} \) is Keplerian, and its k-map is the solution \({{\textbf{m}}}_{\mathscr {P}}\) of the differential system:
3 The Keplerian p-Trigonometry
Before going into the salient aspects of our discussion, it is appropriate to emphasise that trigonometric functions are generalised in the literature similar to the one we will present here, but with fundamental differences. Referring to the monograph [17], (for further references, see the bibliography of [9]), the sine function introduced there is the inverse of the integral
while the cosine is defined as \(\cos _p:=\sin '_p.\) It is worth noting that the sine function we will consider is based on the inversion of a different integral (see Appendix equation (1b)): the sine and cosine functions introduced in [17] parametrize the curve \(|x|^p+|y|^p=1\) while our treatment leads to the parametrisation of \(x^p+y^p=1.\) This alternative approach is motivated by the fact that the functions obtained in this way are used to find eigenvalues of boundary value problems involving the (p, q)-Laplacian (see [17, Eq. (3.9)]). The difference also remains concerning the two-parameter integral introduced in [17] formula (2.15) therein:
While it is certainly true that the inversion of \(F_{p,{p}/{(p-1)}}\) leads to the same function \(\sin _p\) we are dealing with, the difference between the two approaches is about the cosine: in [17] the cosine is “forced” to be the derivative of the sine, while in our approach it is obtained via the inversion of a second integral, see Eq. (1a) of the appendix, which is originated by our geometrical construction.
Given a non-zero natural number \(p\ge 1\), the curves of the pair
are called the p-Fermat curves. The study of the parametrisations of these curves, commonly known as generalized trigonometry, began in the case \(p=3\), with the work of Cayley [7], continued and extended by Dixon [8]. Grammel [12] first tackled the general case of exponent p. Trigonometric and hyperbolic functions generated by the Fermat curve have had visibility in the entire mathematical community thanks to the contributions of [5, 10, 23, 26, 27, 35, 36].
It is not difficult to prove that the p-Fermat curves are Keplerian; since they are generalisations of the circle and the (right branch of the) hyperbola, it is naturally required to define the analog \(\pi _p\) of the constant \(\pi \), and their counterpart \(\pi ^*_p\); so:
-
when p is even, \(\pi _p\) is the the area of the region enclosed by \(\mathscr {F}_p\), and \(\pi _p^*\) is the area of the region bounded by \(\mathscr {F}^*_p\) and their asymptotes;
-
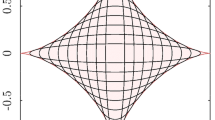
when p is odd, \(\pi _p\) denotes the area of the region bounded by \(\mathscr {F}_p\) and its asymptote; by symmetry, \(\pi ^*_p = \pi _p\) (Figs. 2, 3, 4 and 5).

\(\mathscr {F}_3\)

\(\mathscr {F}_4\)

\(\mathscr {F}^*_3\)

\(\mathscr {F}^*_4\)
By the symmetries of the curves \(\mathscr {F}_p\) and \(\mathscr {F}^*_p\), we get
being \(\lambda _p \) the area of the region bounded by \(\mathscr {F}_p\) and positive semi-axes, and \(\lambda ^*_p \) the area of the region bounded by the curve \(\mathscr {F}^*_p\), the positive semi-axis and its asymptote; their value is, see [10]
For every natural \(p\ge 1\), the solution \(\,{{\textbf{t}}}_p(\kappa ) =:\bigl (\cos _p(\kappa ),\sin _p(\kappa )\bigr )\) of the problem
satisfies relations
which implies that it is also the solution to the equivalent system
The map \(\,{{\textbf{t}}}_p(\kappa ) =:\bigl (\cos _p(\kappa ),\sin _p(\kappa )\bigr )\) is, therefore, the Keplerian map of the curve \(\mathscr {F}_p \), and it will be called the trigonometric map of \(\mathscr {F}_p \) and it satisfies identities (3), (4).
Symmetrically, the Keplerian map of \(\mathscr {F}^*_p\) is the p-hyperbolic map \(\,{{\textbf{h}}}_p(\tau ) =:\bigl (\cosh _p(\tau ),\sinh _p(\tau )\bigr )\), solution of the equivalent problems
satisfying conditions
The actual determination of the p-trigonometric and p-hyperbolic functions and their inverses depends on the explicit solution of systems (3) and (5). The historical case \(p=3\) is detailed in [1, 8, 33, 34]. It is worth noting that, differently from what is in use, the Dixon’s functions “\(\textrm{cm}\)” and “\(\textrm{sm}\)” will be denoted here as “\(\cos _3\)” and “\(\sin _3\)”, while we will maintain the usual notation for the circular and hyperbolic function related to \(p=2\).
4 The p-Gudermannian Functions
Let us now study the curves \(\underline{\mathscr {F}}_p\) and \(\underline{\mathscr {F}}^*_p\) , the restrictions of \(\mathscr {F}_p\) and \(\mathscr {F}^*_p\) to the open right half plane; the domain \(T_p\) of the k-map \(\underline{{\textbf{t}}}_p\) of \(\underline{\mathscr {F}}_p\) is
while the domain of the k-map \(\underline{{\textbf{h}}}_p\) of \(\underline{\mathscr {F}}^*_p\) is
The maps \(\underline{{\textbf{t}}}^*_p:=\left( {\underline{\cos }_p^{-1}},\underline{\tan }_p\right) \) and \(\,\underline{{{\textbf{h}}}}^*_p:=\left( {\underline{\cosh }_p^{-1}},\underline{\tanh }_p\right) \) parametrise the Fermat curves \(\underline{\mathscr {H}}_p\) and \(\underline{\mathscr {F}}_p\), respectively (recall that the exponent \(-1\) in our notation means reciprocal) but if \(p\ne 3\), they are not Keplerian maps because:
However, the Proposition 1 allows us to transform \(\,\underline{{\textbf{t}}}^*_p\) and \(\underline{{{\textbf{h}}}}^*_p\) into the appropriate k-maps by composing them with the functions \({{\,\mathrm{\textrm{gd}}\,}}_p(\kappa ):H_p\rightarrow T_p\) and \({{\,\mathrm{\textrm{dg}}\,}}_p(\tau ):T_p\rightarrow H_p\), as the inverses of the integrals
as stated by the following:
Proposition 3
For every positive natural p, the following equalities hold:
or more concisely:
By the previous proposition, functions \({{\,\mathrm{\textrm{gd}}\,}}_p\) and \({{\,\mathrm{\textrm{dg}}\,}}_p\) can be consistently called the p-Gudermannian function and the \(p^*\)-Gudermannian function; moreover, being both bijective, they turn out to be inverse of each other, which leads us to the following result.
Theorem 4
(The p-Gudermannian functions). For every positive natural p, the p-Gudermannian function \({{\,\mathrm{\textrm{gd}}\,}}_p(\kappa )\) satisfies the identity:
and, analogously, the \(p^*\)-Gudermannian function \({{\,\mathrm{\textrm{dg}}\,}}_p(\tau )\) satisfies the identity:
The following corollary follows from second identities of (7) and (8) and from the fact that the function \({{\,\mathrm{\textrm{dg}}\,}}_p\) is the inverse of \({{\,\mathrm{\textrm{gd}}\,}}_p\).
Corollary 5
For every positive natural p, the p- and the \(p^*\)-Gudermannian functions satisfy the identities
Clearly, our function \({{\,\mathrm{\textrm{dg}}\,}}_2\) is the usual Gudermannian function, whose inverse is known as the Lambertian function, here denoted by “\({{\,\mathrm{\textrm{gd}}\,}}\)”. Finally, it is worth noting that:

The action of functions \({{\,\mathrm{\textrm{gd}}\,}}_p\) and \({{\,\mathrm{\textrm{dg}}\,}}_p\) on p–k-maps
The direct calculation of the Gudermannian functions associated with the Fermattian trigonometric functions is immediate or, at least elementary in the cases \(p=1,2,3\). At the same time, for \(p\ge 4\), the computational difficulties become considerable, such as for \(p=4\) and \(p=6\), if not insurmountable, due to the inversion of hyperelliptic integrals, as in the cases \(p=5,7,11\) etc. (Figs. 6 and 7) However, given that the integration of the differential Eqs. (4) and (5), the integral quadratures of the inverses are obtained; see Eqs. (1a) and (1c) of the Appendix, the calculation can still be performed, even without explicit knowledge, of the cosine, using the integration formula of powers of the inverse function (see for example [15]):
For the p-Gudermannian, applying (9) to identity (6), we obtain, integrating in hypergeometric terms:
It is interesting to note that in the case of \(p=2\), identity (10) yields the usual Gudermannian due to the well-known property of hypergeometric function \(_2\textrm{F}_1\)
For \(p=3,\) since the p-Gudermannian reduces to the identity, we obtain an interesting property of the Dixon function \({\text {cm}}= \cos _3\):
For \({{\,\mathrm{\textrm{dg}}\,}}_p\), we proceed similarly always using (9):
5 The Gudermannian of a Keplerian Map
At this point, to develop a general idea of Gudermannian function, it is natural to investigate whether what we found for all Fermat couples can also happen in a wider family of Keplerian curves. Firstly, we realise that the k-curves of the pair \((\underline{\mathscr {F}} _p, \underline{\mathscr {F}} ^*_p)\) are obtained from each other by replacing coordinates (x, y) with (1/x, y/x) in their implicit defining relations, or, equivalently, if parametrically defined, by setting
Note that
The nature and properties of such transformation are introduced in the following proposition.
Proposition 6
(The star homology). The involutory geometric transformation \(\,(x,y) \overset{*}{\mapsto }\ \bigl (\tfrac{1}{x},\tfrac{y}{x}\bigr ) \,\) is the harmonic homology having centre \(C:=(-1,0)\) and axis \(\mathscr {L}:=\{x=1\}\). Such transformation, hereinafter said the star homology, maps the left half-plane into itself, and the strip \(\{0<x\le 1\}\) into the half-plane \(\{1\le x\}\); its action on lines is
In particular, horizontal lines are mapped into lines through the origin, the vertical axis being mapped into the improper line.
The above proposition induces us to narrow our attention to k-curves contained in the right half-plane. The action of the star homology on lines implies that the star homologue \(\mathscr {G}^* \) of a k-curve \(\mathscr {G} = {{\textbf{g}}}(I)\) is a Keplerian one whenever \(\mathscr {G} \) has no horizontal tangent. If, in addition, the arc of \(\mathscr {G}\) with non-negative abscissa lies on the left of the axis \(\mathscr {L}\), such a curve will be called a tk-curve (“t” for trigonometric) and its Keplerian map - a tk-map - will be denoted as \({{\textbf{t}}}_{\mathscr {G}}(\kappa ) = \bigl (\cos _{\mathscr {G}}(\kappa ),\sin _{\mathscr {G}}(\kappa )\bigr )\).
To sum up, the image of a map \(\textbf{g} :\!{I} \rightarrow {\mathbb {R}}^2\) is a tk-curve whenever for every \(s\in I\), it satisfies the following conditions:
Symmetrically, the image of a map \(\textbf{h} :\!{J} \rightarrow {\mathbb {R}}^2\) is a hk-curve (“h” for hyperbolic), whenever for every \(t\in J\) it satisfies the following conditions:
The Keplerian map - an hk-map - of an hk-curve \(\mathscr {H} \) will be denoted as \({\textbf{h}}_{\mathscr {H}}(\kappa ) = \bigl (\cosh _{\mathscr {H}}(\kappa ),\sinh _{\mathscr {H}}(\kappa )\bigr )\).
It is easy to see that the star homologue of a tk-curve \(\mathscr {G}\) is an hk-curve, but, in general, the star homologue of its Keplerian map differs from the Keplerian map of its star homologue \(\mathscr {G}^*\):
The link between the maps \({{\textbf{t}}}_{\mathscr {G}}\) and \({{\textbf{h}}}_{\mathscr {G}^*}\) is provided by Proposition 1 and identity (11): if \({{\,\mathrm{\textrm{gd}}\,}}_{_{\mathscr {G}}}(\kappa )\) denotes the inverse of the integral
we have
then, the function \(\kappa = {{\,\mathrm{\textrm{gd}}\,}}_{_{\mathscr {G}}}(\tau )\) can be consistently defined as the Gudermannian function of the tk-map \({{\textbf{t}}}_{\mathscr {G}}\).
From the fact that the star homology is involutory, we are immediately led to define the Gudermannian function of the hk-map \({{\textbf{h}}}_{\mathscr {G}^*}\) as the inverse \(\tau = {{\,\mathrm{\textrm{gd}}\,}}_{_{\mathscr {G}^*}}(\kappa ) \) of the integral:
getting
Realising that \({{\,\mathrm{\textrm{gd}}\,}}_{_{\mathscr {G}}}(\tau )\) and \({{\,\mathrm{\textrm{gd}}\,}}_{_{\mathscr {G}^*}}(\kappa )\) are inverses of each other, we conclude that
Moreover, from identity (12) we can draw
and finally
Now, what has been presented can be condensed into the following statement.
Theorem 7
(The Gudermannian function of a t-Keplerian map). The t-Keplerian map \({{\textbf{t}}}_{\mathscr {G}}\) of the tk-curve \(\mathscr {G}\) and the h-Keplerian map \({{\textbf{h}}}_{\mathscr {G}}\) of the star homologue \(\mathscr {G}^*\) are linked by equations
where

6 Examples
It seems now significant to illustrate through examples how the theoretical arguments presented can be implemented in practice. In the first example, we present the trigonometric structure of a parabola, while in the second, we consider two cubic curves whose trigonometric functions have been obtained in [9].
6.1 A Parabola
The curve \(\mathscr {P}:=\{ p(x,y) = 0, x\ge 0 \}\), with \(p(x,y) :=x+y^2-1\), is a tk-curve, having as a (non-Keplerian) parametrisation the map \({{\textbf{g}}}(u) :=(1-u^2,u)\), with \( u\in \, ]-1,1[ \). Its star homologue is \(\mathscr {P}^* = \{x-x^2+y^2=0, \, x\ge 1\}\), parametrised by the map \({{\textbf{g}}}^*:=\bigl (\tfrac{1}{1-u^2},\tfrac{u}{1-u^2}\bigr )\).
The tk-map of \(\mathscr {P}\) is \({\textbf{t}}_{\mathscr {P}}(\kappa ) = \textbf{g}(u(\kappa ))\), where \(u(\kappa )\) is the inverse of the integral
from which we obtain, by inverting
From Proposition (2) we get

\(\mathscr {G}\) and \(\mathscr {G}^*\)
Therefore:
The differential equation of the hyperbolic sine (i.e., the sine of \(\mathscr {P}^*\)) is
in this case, we can express the hyperbolic arcsine, but the sine expression cannot be made explicit:
The Gudermannian is computed as follows:
By determining the arctangent in both cases, we can make explicit the alternative representation of the Gudermannian. This is achieved by expressing the derivative of the tangent in terms of the tangent itself by combining the general derivation rule of the tangent with the functional laws induced by the generating curve. In the case of \(\mathscr {P}\), we have
which leads to the differential equation of the tangent
From this, after the appropriate integration, we arrive at the explicit expression of the arctangent, which confirms the formula for the Gudermannian previously found:
Similarly, for the curve \(\mathscr {P}^*\), we represent the derivative of the tangent in terms of the tangent itself
and then we use the expression of the derivative of the tangent to deduce its differential equation
so that the arctangent is, after the relevant integration
which is compliant with the Gudermannian representation.
6.2 A Couple of Cubics
In [9], we develop the Keplerian trigonometry generated by a couple of cubics:
Setting \(\mathscr {H} :=\{ g(x,y)=0, x\ge 1 \}\) and \(\mathscr {D} :=\{ f(x,y)=0 \}\), we realise that \(\mathscr {H}\) is an hk-curve, while \(\mathscr {D}\) is a tk-curve. Their Keplerian maps \({\textbf{h}}_{\mathscr {H}} = (\cosh _{\mathscr {H}},\sinh _{\mathscr {H}})\) and \(\textbf{t}_{\mathscr {D}} = (\cos _{\mathscr {D}},\sin _{\mathscr {D}})\) are solutions to the systems (Figs. 8 and 9):

\(\mathscr {H}^*\, \textrm{and}\, \mathscr {H}\)
The star homologues are
and
By Proposition (2), their Keplerian maps are the solution for systems

\(\mathscr {D}\, \textrm{and}\, \mathscr {D}^{*}\)
To determine the functions \(\sin _{\mathscr {H}^*}\) and \(\sinh _{\mathscr {D}^*}\), after obtaining x from the equations \(g^*=0\), \(f^*=0\), we replace it in the second equation and get the two autonomous and separable differential equations in y:
The relative arcsine functions are then given by
Following an analogous procedure for the cosine functions, we get the separable differential equations:
Therefore inverse cosine functions are
The Gudermannian of the curve \(\mathscr {D}\) can now be computed by combining identities (13a) and (14a) as
Changing variable \(\sin _{\mathscr {D}^{*}}(t)=\sigma \), and recalling the inverse sine property given by (15b) we arrive at
The integral (16) is expressible in terms of an elliptic integral of the first kind using the variable transformation:
This last integral is provided by [6, entry 240.00], so that:
In this case, it is possible to solve for t, obtaining the explicit representation of the tangent by inverting the elliptic integral of the first kind: we divide this operation in two steps; first, we invert the elliptic integral in (17), obtaining:
and then solve for \(t=\tan ^2_{\mathscr {D}}\kappa \):
Finally, it is not difficult to obtain the expression of the Gudermannian, using the fundamental trigonometric identity induced by \(\mathscr {D}^{*}\) i.e. \(1+3\sin ^2_{\mathscr {D}^{*}}(\kappa )=\cos ^3_{\mathscr {D}^{*}}(\kappa ),\) we arrive at:
To represent the Gudermannian of \(\mathscr {H}\), we proceed in a completely analogous way to the one just illustrated; we have:
Here the change of variable is \(\sin _{\mathscr {H}^{*}}(t)=\sigma \) with the inverse sine property (15a). This last integral is related to the \(\mathscr {H}\) arctangent: reasoning as previously we arrive at:
so that:
The way to calculate integral (18) is similar to those seen previously: in this case, the transformation of variables that reveals the “elliptic” nature of these integrals is:
then entry 244.00 of [6] solves the problem:
while the Gudermannian of \(\mathscr {H} \) is:
Finally we can also retrive the expression \(\tanh _{\mathscr {H}}\):
7 The Intimate Geometric Structure
In conclusion, we dedicate a few more lines to expose the intimate structure of what has been treated in previous pages.
Given a (not necessarily Keplerian) map \(\textbf{u} :\!{I} \rightarrow {\mathbb {R}}^2\), \({\textbf{u}}(s) =: \bigl ({{\,\mathrm{\mathfrak {cos}}\,}}_{{\textbf{u}}}(s),{{\,\mathrm{\mathfrak {sin}}\,}}_{{\textbf{u}}}(s) \bigr )\) with image \(\mathscr {U}\), we set consistently \({{\,\mathrm{\mathfrak {tan}}\,}}_{{\textbf{u}}}(s) :=\frac{{{\,\mathrm{\mathfrak {sin}}\,}}_{{\textbf{u}}}(s)}{{{\,\mathrm{\mathfrak {cos}}\,}}_{{\textbf{u}}}(s)}\). Suppose now the map \({\textbf{u}}\) satisfy conditions.
and let \({\textbf{v}}\) a (not necessarily Keplerian) map which parametrizes the star homologue \(\mathscr {V} :=\mathscr {U}^*\), fulfilling conditions similar to those above (Fig. 10).

The star homology
Given a point \(P={\textbf{u}}(s)\) and its homologue \(P^*={\textbf{v}}(t)\), let us consider the lines \(\mathscr {L} :=OP\), and \(\mathscr {M} :=OP^*\), and set
By the properties of homology seen in theorem (6), we immediately deduce the identities:
Note that functions \({{\,\mathrm{\mathfrak {sin}}\,}}_{{\textbf{u}}}\), \({{\,\mathrm{\mathfrak {sin}}\,}}_{{\textbf{v}}}\), \({{\,\mathrm{\mathfrak {tan}}\,}}_{{\textbf{u}}}\) and \({{\,\mathrm{\mathfrak {tan}}\,}}_{{\textbf{v}}}\) have inverses \({{\,\mathrm{\mathfrak {arcsin}}\,}}_{{\textbf{u}}}\), \({{\,\mathrm{\mathfrak {arcsin}}\,}}_{{\textbf{v}}}\), \({{\,\mathrm{\mathfrak {arctan}}\,}}_{\textbf{u}}\) and \({{\,\mathrm{\mathfrak {arctan}}\,}}_{{\textbf{v}}}\), by which, from identities (19) we obtain:
We can, therefore define the Gudermannian functions relating to the maps \({\textbf{u}}\) and \({\textbf{v}}\) as:
obtaining:
In this broader framework, however, only noteworthy results are found when the maps considered share analytical/geometric properties of some significance, as those analysed in the previous sections, for which \({{\,\mathrm{\Lambda }\,}}{{\textbf{m}}}= 1.\)
As a first instance, let us consider the case when both \(\mathscr {U}\) and \(\mathscr {V}\) have polar map \({\textbf{u}}(\theta ):=r_{\textbf{u}}(\theta ){{\textbf{t}}}_2(\theta )\), \({\textbf{v}}(\phi ):=r_{\textbf{v}}(\phi ){{\textbf{t}}}_2(\phi )\), which gives us
obtaining
If, for example, \(\mathscr {U}, \mathscr {V}\) are the circle and the hyperbola, then \(r_{{\textbf{u}}}(\theta ) = 1\), \(r_{{\textbf{v}}}(\phi ) = \frac{1}{\sqrt{\cos (2\phi )}}\), and
Note that completely symmetrical considerations can be developed in case of hyperbolic polar presentation of curves, that is, in the case where curves are expressed in term of the hyperbolic map \({\textbf{h}}_2(t)\); in this situation, as example, the arc of the circle in the first quadrant is the image of the map \(\textbf{u}(s):=\frac{1}{\sqrt{\cosh (2s)}}{\textbf{h}}_2(s)\), and
Availability of data and materials
Not applicable; the present manuscript does not contain any data.
References
Adams, O.S.: Elliptic Functions Applied to Conformal World Maps. Washington Government printing office, Washington (1925)
Altun, E., Alizadeh, M., Yousof, H.M., Hamedani, G.G.: The Gudermannian generated family of distributions with characterisations, regression models and applications. Stud. Sci. Math. Hung. 59(2), 93–115 (2022)
Borwein, J.M., Borwein, P.B.: Pi and the AGM: A Study in Analytic Number Theory and Computational Complexity. John Wiley & Sons, New York (1987)
Boyd, J.P.: New series for the cosine lemniscate function and the polynomialization of the lemniscate integral. J. Comput. Appl. Math. 235(8), 1941–1955 (2011)
Burgoyne, F.D.: Generalized trigonometric functions. Math. Comput. 18(86), 314–316 (1964)
Byrd, P.F., Friedman, M.D.: Handbook of Elliptic Integrals for Engineers and Scientists. Springer, New York (1971)
Cayley, A.: On the elliptic function solution of the equation \(x^3+y^3-1=0\). Proc. Camb. Philos. Soc. 4, 106–109 (1883)
Dixon, A.C.: On the doubly periodic functions arising out of the curve \(x^3+y^3 - 3\alpha \, xy = 1\). Q. J. Pure Appl. Math. 24, 167–233 (1890)
Gambini, A., Nicoletti, G., Ritelli, D.: Keplerian trigonometry. Monatsh Math. 195(1), 55–72 (2021)
Gambini, A., Nicoletti, G., Ritelli, D.: The Wallis products for Fermat curves. Vietnam J. Math., Page to appear (2023)
Gradshteyn, I.S., Ryzhik, I.M.: Table of Integrals, Series, and Products. Academic Press, New York (2007)
Grammel, R.: Eine Verallgemeinerung der Kreis-und Hyperbelfunktionen. Arch. Appl. Mech. 16(3), 188–200 (1948)
Hiriart-Urruty, J.B.: Des fonctions ... pas si particulières que ça: celles de Lambert, Gudermann et Airy. Quadrature 101, 40–45 (2016)
Kaplan, M., Rasekhi, M., Saber, M.M., Hamedani, G.G., El-Raouf, M.M.A., Aldallal, R., Gemeay, A.M.: Approximate maximum likelihood estimations for the parameters of the generalized Gudermannian distribution and its characterizations. J. Math. 2022, 4092576 (2022)
Key, E.: Disks, shells, and integrals of inverse functions. Coll. Math. J. 25(2), 136–138 (1994)
King, L.V.: On the Direct Numerical Calculation of Elliptic Functions and Integrals. University Press, Cambridge (1924)
Lang, J., Edmunds, D.E.: Eigenvalues, Embeddings and Generalised Trigonometric Eigenvalues, Embeddings and Generalised Trigonometric Functions. Lecture Notes in Math, vol. 2016. Springer, Berlin (2011)
Legendre, A.M.: Traité des fonctions elliptiques et des intégrales Euleriennes. Tome premier. Imprimerie de Huzard-Courcier, Paris (1825)
Mingari Scarpello, G., Ritelli, D.: Circular motion of a particle under friction and hydraulic dissipation. Tamkang J. Math. 36(1), 1–16 (2005)
Mondaini, L.: The rise of solitons in sine-Gordon field theory: from Jacobi amplitude to Gudermannian function. J. Appl. Math. Phys. 2(13), 1202–1206 (2014)
NIST Digital Library of Mathematical Functions. http://dlmf.nist.gov/, Release 1.1.8 of 2022-12-15. F.W.J. Olver, A.B. Olde Daalhuis, D.W. Lozier, B.I. Schneider, R.F. Boisvert, C.W. Clark, B.R. Miller, B.V. Saunders, H.S. Cohl, and M.A. McClain, eds
Peters, J.M.H.: The Gudermannian. Math. Gaz. 68(445), 192–196 (1984)
Poodiack, R.D.: Squigonometry, hyperellipses, and supereggs. Math. Mag. 89(2), 92–102 (2016)
Rickey, V.F., Tuchinsky, P.M.: An application of geography to mathematics: history of the integral of the secant. Math. Mag. 53(3), 162–166 (1980)
Robertson, J.S.: Gudermann and the simple pendulum. Coll. Math. J. 28(4), 271–276 (1997)
Robinson, P.L.: Higher trigonometry: a class of nonlinear systems. arxiv preprint (2019)
Robinson, P.L.: The Dixonian elliptic function. arxiv preprint (2019)
Romakina, L.N.: The inverse Gudermannian in the hyperbolic geometry. Integral Transform. Spec. Funct. 29(5), 384–401 (2018)
Sabir, Z., Wahab, H.A., Guirao, J.L.G.: A novel design of Gudermannian function as a neural network for the singular nonlinear delayed, prediction and pantograph differential models. Math. Biosci. Eng. 19(1), 663–687 (2022)
Schlömilch, O.: Compendium der höheren Analysis. Vieweg, Braunschweig (1853)
Selberg, A., Chowla, S.: On Epstein’s zeta-function. J. Reine Angew. Math. 227(86), 110 (1967)
The On-Line Encyclopedia of Integer Sequences. https://oeis.org/wiki/Main_Page. N. J. A. Sloane
van Fossen Conrad, E., Flajolet, P.: The Fermat cubic, elliptic functions, continued fractions, and a combinatorial excursion. Séminaire Lotharingien de Combinatoire 54(B54g), 1–44 (2006)
Whittaker, E.T., Watson, G.N.: A Course of Modern Analysis. Cambridge University Press, Cambridge (1902)
Wood, W.E.: Squigonometry. Math. Mag. 84(4), 257–265 (2011)
Wood, W.E., Poodiack, R.D.: Squigonometry: The Study of Imperfect Circles. Springer, Cham (2022)
Acknowledgements
The authors thank the anonymous referee for the valuable suggestions which greatly improved our article.
Funding
Open access funding provided by Alma Mater Studiorum - Università di Bologna within the CRUI-CARE Agreement. The authors declare that no funds, grants, or other support were received during the preparation of this manuscript. The authors have no relevant financial or non-financial interests to disclose. All the authors were involved in the preparation of the manuscript. All the authors have read and approved the final manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Computations Related to Generalised Trigonometry
Appendix: Computations Related to Generalised Trigonometry
We will illustrate the integrating techniques for systems (3) and (5) and the determination of the inverse of the tangent, given its relevance to the determination of the Gudermannian. We will provide the computations from \(p=4\) although, to the best of our knowledge, explicit representations of trigonometric functions of order four have not been provided in the literature, it should be mentioned that the OEIS Encyclopedia of Integer Sequences [32], the coefficients of the power series of these functions and explicit formulæ are available: A153301 report the sine, A153300 the cosine.
As customary, \({{\,\mathrm{\textrm{K}}\,}}(k)\) stands for the complete elliptic integral of the first kind, with modulus k and \({\text {sn}},\,{\text {cn}},\,{\text {dn}},\,{\text {sd}}\) denote the Jacobi elliptic functions: for details, we refer to [6].
When \(p=2\), we have of course \({{\textbf{t}}}_2 = (\cos ,\sin )\), \({{\textbf{h}}}_2=(\cosh ,\sinh )\), while for \(p=1\, {{\textbf{t}}}_1(\kappa )=(1-\kappa ,\kappa )\), \({{\textbf{h}}}_1(\tau )=(1+\tau ,\tau ).\) In the Cayley–Dixon case \(p=3,\) [7, 8]:
where \({\text {cm}}=\cos _3\) and \({\text {sm}}=\sin _3\) are the Dixon elliptic functions [1, 8]. As seen in this situation, the trigonometric and hyperbolic functions are closely related. It is worth recalling that using the Jacobian elliptic functions of modulus \(k_3=\sin \frac{\pi }{12}\), and setting
the following identities are achieved (for details, see [1, 8, 11, 27, 33]):
To integrate systems (3) and (5), following the procedure given in [9], it is convenient to separate both systems into two individual equations, one for sine and the other for cosine. In the trigonometric case, we have
where the left equation is for the sine and the right for the cosine. The hyperbolic case reads as
In this way, the inverse of the generalised trigonometric and hyperbolic functions are available:
For simplicity, we work in the first quadrant, so assuming \(0\le x\le 1,\,0\le y\le 1\).
When \(p=4\), Eq. (1b) defines the \(\sin _4\) function around the origin:
The integral in the right-hand side of (2) is indeed elliptic, in fact the change of variable \(1-s^4=(1+z^4)^{-1}\) provides:
The integral in the right-hand side of (3) is evaluated as
The integral (4) does not appear in the Byrd handbook, although entry 263.50 therein is very similar. The proof of (4), inspired by [19, Lemma 2.1] starts with the variable’s change:
which yields
Now, recalling that:
we can write:
This proves (4). To make the function \(\sin _4\) explicit, we need, first, to invert the integral calculated in (4):
Subsequently, recalling the upper extreme of integration in the right-hand side of (3), the function sought is determined by solving concerning y
From the latter, after a not inconsiderable amount of algebraic work, which we omit here, we arrive at:
It must be said that these representations are not referable to the entire fundamental period interval \([-\pi _4,\pi _4].\) First, it is worth noting that, in this case, we can express the period in terms of the real period of the Jacobi elliptic function, which is not surprising because \(\frac{1}{\sqrt{2}}\) is an elliptic singular modulus, i.e., the solution to the equation
with n positive integer, and it is well known, see [31] and [3, page 138] that in this case, the complete elliptic integral of the first kind \({{\,\mathrm{\textrm{K}}\,}}(\frac{1}{\sqrt{2}})\) is expressible in terms of the Euler Gamma function: in our case, the simplest, since \(n=1\), we have \(\pi _4=2{{\,\mathrm{\textrm{K}}\,}}(\frac{1}{\sqrt{2}}).\) We have that the representation (5) is valid for \([-\frac{\pi _4}{2},\frac{\pi _4}{2}]=[-2\lambda _4,2\lambda _4]=[-{{\,\mathrm{\textrm{K}}\,}}(\frac{1}{\sqrt{2}}), {{\,\mathrm{\textrm{K}}\,}}(\frac{1}{\sqrt{2}})],\) while in \([-\pi _4,\pi _4]\setminus [-\frac{\pi _4}{2},\frac{\pi _4}{2}]\) it is necessary to change the sign. Notice that, from (2) follows:
The situation is entirely analogous to the case of circular functions; in this case, \([0,{{\,\mathrm{\textrm{K}}\,}}(\frac{1}{\sqrt{2}})]\) represents the first quadrant.
To determine the cosine function, we start with the complementary integral (1a), which for \(p=4\) reads as:
It follows that the integration and subsequent inversion follow those seen in the case of sine and lead to the following representation of cosine:
which is valid for \(u\in [0,2{{\,\mathrm{\textrm{K}}\,}}(\frac{1}{\sqrt{2}})].\) By similar reasoning, we see that the expression (6) defining cosine is correct in \([0,\pi _4]=[0,4\lambda _4]=[0,2{{\,\mathrm{\textrm{K}}\,}}\left( \frac{1}{\sqrt{2}}\right) ]\) and in \([-\pi _4,0]\) a change of sign is again needed.
Similarly, the hyperbolic sine case is dealt with by specialising at \(p=4\), the formula (1d) leading to:
This integral is indeed elliptic; in fact the change of variable \(1+u^4=(1-z^4)^{-1}\) implies the identity:
The integral in the right-hand side of (7) is tabulated in Byrd entry 214.0, which reads as:
It follows that the inversion process of the integral (7) leads, in this case, to, assuming \(y>0\):
Solving for y, taking the positive determination after recalling the definitions and properties of the Jacobian elliptic functions, the most concise representation of the hyperbolic sine of order four is:
being \({\text {ds}}=\frac{{\text {dn}}}{{\text {sn}}}.\) The period, expressed in “elliptic” terms in this case is \(\frac{4}{\sqrt{2}}\,{{\,\mathrm{\textrm{K}}\,}}\left( \frac{1}{\sqrt{2}}\right) .\)
It is worth noting that when \(p=4\), the inverse tangent function is related to the hyperbolic arc lemniscate sine function (see, for instance, [4]):
Moreover, recalling (8) we have:
the branch of \(\mathscr {F}^*_4 \) with nonnegative abscissa is mapped by:
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Gambini, A., Nicoletti, G. & Ritelli, D. A Structural Approach to Gudermannian Functions. Results Math 79, 10 (2024). https://doi.org/10.1007/s00025-023-02038-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00025-023-02038-7