
Abstract
One of the main goals of the interpretation of magnetic data is the imaging of the boundaries of subsurface structures. In this study, a new edge detector called improved horizontal tilt angle (impTDX) has been introduced and tested on synthetic and measured magnetic data. The filter exhibits high efficiency not only in detecting the boundaries of the sources, but also in determining magnetic sources from different depth levels. The impTDX filter produces more precise and sharper boundaries, increases the discernibility of neighboring anomalies, has the advantage of avoiding creation of false edges, and is less sensitive to noise compared to other known filters, which minimizes the uncertainty in the data interpretation. The proposed filter has been applied to aeromagnetic data from Sohag, Egypt. It highlighted the subsurface magnetic structures with high resolution where a structural map showing normal faults demarcating the subsurface causative horsts and grabens was constructed. This map confirms that the Nile grabens are of tectonic origin related to the opening of the Red Sea. Our findings indicate that the proposed filter can be considered as a valuable tool in mapping of subsurface magnetic structures.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Edge detectors have been widely used in the interpretation of potential field methods for delineating geologic structures such as faults, contacts, dykes, and ore bodies (Alarifi, 2022; Alrefaee et al., 2022; Chen et al., 2022; Ibraheem et al., 2018a, 2018b, 2019, 2022; Mohamed & Zaher, 2020; Napoli et al., 2021; Uluğtekin et al., 2022). The vertical and horizontal derivatives of the gravity and magnetic data serve as a base for the edge detection filters. In the geophysical literature, several edge detection techniques have been introduced to detect the shape of the subsurface causative sources based on the gradients of the potential field or on the ratios of these gradients (e.g., Arisoy & Dikmen, 2013; Cooper, 2014; Cooper & Cowan, 2006; Cordell & Grauch, 1985; Ferreira et al., 2013; Miller & Singh, 1994; Verduzco et al., 2004; Wijns et al., 2005). A number of edge detectors have recently been developed to improve the imaging of the edges of subsurface causative gravity and magnetic sources (e.g., Chen & Zhang, 2022; Dwivedi & Chamoli, 2021; Ibraheem et al., 2021a; Nasuti Y. & Nasuti A., 2018; Nasuti et al., 2019; Prasad et al., 2022; Zhu et al., 2021, among others).
For comparison purposes, some popularly and frequently used edge detectors have been selected. The total horizontal derivative (THDR) of the potential field is given by the Eq. (1). The edges of magnetic and gravity sources are highlighted by the peaks of the THDR amplitude (Cordell & Grauch, 1985):
where f is the measured potential field and \(\left(\frac{\partial \mathrm{f}}{\partial \mathrm{x}}\right)\) and \((\frac{\partial \mathrm{f}}{\partial \mathrm{y}})\) are its derivatives in x and y directions.
Moreover, the amplitude of the analytical signal (AS) is calculated using the following formulation (Roest et al., 1992):
where \(\frac{\partial \mathrm{f}}{\partial \mathrm{z}}\) is the derivative of the field in z direction,
The causative source is defined by the AS maxima where it generates a bell-shaped anomaly over the body. However, if several causative sources are present, the outcome of the AS would be dominated by strong anomalies and by shallow sources (Arisoy & Dikmen, 2013). Additionally, the predicted edges’ magnetic signatures appear larger and more diffused compared to the actual ones (Nasuti et al., 2019). Furthermore, Wijns et al. (2005) used the ratio of THDR to AS to suggest a Theta map (or cos theta) filter which is defined as:
The tilt angle (TDR) was the first phase-based filter introduced by Miller and Singh (1994) and is calculated using the Eq. (4):
Similar to TDR filter but sharper filter was introduced by Cooper and Cowan (2006) known as horizontal tilt angle (TDX) and is given by the Eq. (5) where its maximum values correspond the edges of the causative structure. Like with the Theta and TDR filters, the TDX filter estimates diffuse edges that are wider than true boundaries (Ma et al., 2014).
Moreover, the ratio of the first-order vertical derivative to the total horizontal derivative of AS defines the Etilt filter developed by Arisoy and Dikmen (2013) which is calculated using the Eq. (6):
where k is a dimensional correction factor given by \(k=\frac{1}{\sqrt{{dx}^{2}+{dy}^{2}}}\), and dx and dy represent the sampling intervals in x and y directions, respectively.
Arisoy and Dikmen (2013) suggested to use the horizontal derivative of the ETilt as an edge detection filter and called it enhanced total horizontal derivative of the tilt angle (ETHDR) (Eq. 7) because it produces sharper boundaries over the causative sources than the Etilt filter. The ETilt and ETHDR filters provide a clear advantage over the original tilt derivative in terms of resolution and detection of deep and shallow bodies (Nasuti Y. & Nasuti A., 2018). The ETHDR filter effectively defines the boundaries of the causative structures even in the presence of several adjacent sources.
So, the edges of the causative sources are detected by zero values in the TDR function and by the maxima in the case of other edge detectors used in this study. However, the AS filter can be considered as a good detector of the source itself rather than its edges. The known conventional filters published in the geophysical literature have several drawbacks, including the limitation in imaging the boundaries of deep and/or neighboring causative sources and also the producing of false anomalies. In addition, the delineation of edges of the subsurface structures is wider than the actual ones using these filters. Therefore, a new enhancement filter has been designed in this research in order to overcome these issues. Both synthetic noise-free and noise-contaminated magnetic data, as well as data measured in the field from Sohag, Egypt, were used to evaluate the efficiency of the proposed new filter.
2 ImpTDX Filter
The arctangent function has been used in most of the published edge detectors introduced in the geophysical literature (e.g., Arisoy & Dikmen, 2013; Cooper & Cowan, 2006; Ferreria et al., 2013; Ma et al., 2014; Miller & Singh, 1994; Nasuti et al., 2019, among others). However, the hyperbolic tangent function has a smaller range [\(-\) 1, + 1] than the arctangent function [\(-\pi /2\), \(+\pi /2\)] (i.e., a smaller range around the turning point on the x-axis), therefore using it in edge detection may lead to detect the boundaries of the causative bodies much precisely.
Despite providing a strong and sharp gradient over the causative source, the TDX filter (Eq. 5) portrays boundaries that are wider than they actually are, especially for structures at intermediate and deep depths. Therefore, we present in this study a new novel edge detector using hyperbolic tangent function which can overcome this problem and has several other advantages. The new filter has been given the name impTDX filter since it can be thought of as an enhanced version of the TDX filter. It normalizes the second-order vertical derivative (SVD) using the TDX function and is calculated as follow (after reduction of the data to the north magnetic pole in case of magnetics):
where \(\frac{{\partial }^{2}f}{\partial {z}^{2}}\) is the SVD of the measured magnetic field and M is the average value of the magnetic field intensity in the study area.
Because the SVD of the measured potential field can increase the noise in the resultant data, the second-order of horizontal derivative can be used instead using Laplace equation. Thus, Eq. (8) can be written as follow:
It can also be written as:
The range of the impTDX transform varies from − 1 to 1 due to the characteristics of the hyperbolic tangent function, and the maxima of the new filter peak over the entire causative body. The filter sharply detects the edges of both deep and shallow structures as well as the edges of various magnetic sources adjacent to each other. It also equalizes the signals of causative sources located at shallow and deep depths. We recommend computing the THDR of the impTDX function (THDR_impTDX), which gives maximum values over the body’s edges, in order to more clearly and sharply locate the edges of magnetic sources. It is calculated using Eq. (12).
3 Synthetic Modeling Study
The robustness of the impTDX filter to detect the edges of magnetic sources was compared with other filters and examined using 3D synthetic models. It is presumed that the inclination of the magnetic field equals 90 and the declination is zero. Otherwise, magnetic data require correction to remove their dependence on the magnetic inclination. Two scenarios have been considered in this study assuming only induced magnetization:
3.1 Scenario I
The first scenario includes a model composed of two dyke-like prisms (D1 and D2) located at different depths (Fig. 1a). They have the same dimensions (length = 4000 m, width = 400 m, and depth extent = 4000 m). The depths to the top surface are 50 m and 250 m for D1 and D2, respectively. A total magnetic field M = 50,000 nT and a magnetic susceptibility contrast of 0.02 (SI unit) were used in the modeling study. Figure 1b shows the magnetic anomaly map produced by the synthetic models in Fig. 1a. Figurs 2a–i demonstrate the results of applying different filters to the obtained magnetic data. These include THDR (Fig. 2a), AS (Fig. 2b), TDR (Fig. 2c) Theta map (Fig. 2d), TDX (Fig. 2e), Etilt (Fig. 2f), ETHDR (Fig. 2g), impTDX (Fig. 2h), and THDR_impTDX (Fig. 2i). All the used methods perform nicely in the case of shallow targets (body D1). However, the results become more complex when depicting the edges of deep structures (body D2). For a clearer comparison between the results of applying the different filters, the profile P1–P1′ (see Fig. 1b) was taken to cross the bodies perpendicularly and pass over their centers. The response to these filters along this profile is shown in Fig. 3.

a A 3D perspective of two dyke-like synthetic models located at 50 m (D1) and 250 m (D2) with dimensions of 4000 m × 400 m × 4000 m. b Magnetic anomaly map of the synthetic model shown in a. Dotted black line refers to the location of profile P1–P1′ taken perpendicular to the strike of the dyke-like structures

a THDR, b AS, c TDR, d Theta, e TDX, f Etilt, g ETHDR, h impTDX, and i THDR_impTDX maps of the synthetic model data in Fig. 1a. Real edges of magnetic sources are shown in black lines

A presentation of the magnetic data along profile P1–P1′ in Fig. 1b and the magnetic responses produced by applying of the different edge detectors used in the current study
The magnetic data filtered using THDR (Fig. 2a) and AS (Fig. 2b) were unable to precisely detect the edge of the deep body (D2). Despite the other filters (i.e., TDR, Theta map, TDX, Etilt and ETHDR) were able to equalize the signals from shallow and deep depths but they detected the deep sources with boundaries much wider than they are. Compared to previous approaches, the impTDX and its THDR produce results that are less dependent on the depth of the sources as shown in Fig. 5h and i and also in Fig. 6. Even for deeper sources, the impTDX filter's maximum values are located over the causative sources where the impTDX filter images their edges distinctively. Moreover, the THDR_impTDX filter shows very sharp peaks over the body's boundaries.
3.2 Scenario II
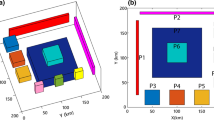
The synthetic modeling study in the second scenario (Fig. 4a and b) includes six magnetic prismatic bodies (B1–B6) located at different depths (from 5 to 20 m) with magnetic and geometrical parameters shown in Table 1. Except for B6, which has a magnetic susceptibility of − 0.02 (SI unit) representing a diamagnetic material, all magnetic sources have magnetic susceptibilities of 0.02 (SI unit). For the present synthetic modeling study, a background total magnetic field of 50,000 nT is employed. Two synthetic data sets with a grid of 150 m by 200 m and spacing of 1 m were presumed to appraise the efficiency of the suggested filter. One set is free of noise and the other is corrupted with Gaussian noise with a standard deviation of 0.1 nT (Ferreira et al., 2013; Li et al., 2019; Nasuti et al., 2019) to simulate the data collected at the field. The magnetic response to the various synthetic models is shown in Fig. 4c for the noise-free magnetic data. The magnetic map produced by the synthetic models (Fig. 4a) shows that the resultant magnetic amplitudes range from − 4 to 314 nT. The magnetic signature of the shallow bodies (e.g., B1 and B4) are clearly noticed whereas the amplitudes of the deep bodies are relatively low. However, the anomalies from B5 and B6 are complex due to the relative positions of these bodies. The results of applying THDR, AS, TDR, Theta map, TDX, ETilt, ETHDR, impTDX, and THDR_impTDX filters are shown in Fig. 5. Figure 6 shows a profile P2-P2' passing over the centers of the bodies B1, B2, and B3 (refer to Fig. 4c to see the location of this profile). This profile shows clearly the differences between the applied methods.

a A 3D perspective, b a bird’s-eye view of a synthetic model including six magnetic bodies (B1–B6) with different depths range from 5 to 20 m (refer to Table 1), and c Noise-free magnetic anomaly map produced by the magnetic sources in a. Dotted black line in Fig. 3c refers to the location of profile P2–P2'

a THDR, b AS, c TDR d Theta, e TDX, f Etilt, g ETHDR, h impTDX, and i THDR_impTDX maps of the synthetic model data. Real edges of magnetic sources are shown in black lines

A presentation of the magnetic data in Fig. 4c along profile P2–P2′ and the magnetic responses produced by applying of the different edge detectors used in the current study
The result of applying the THDR filter to the calculated synthetic magnetic data using the model in Fig. 4a and Table 1 is shown in Fig. 5a. The filter shows a good result in detecting shallow sources (i.e., B1, B4, and B6) but with edges wider than the actual ones. However, the deep sources (B2, B3, and B5) were poorly detected due to the attenuation of the amplitudes with depth. Regarding AS filter, it reveals shallow sources` edges more clearly than deep ones, moreover it couldn`t discriminate between the two overlapped prismatic bodies B5 and B6, and shows them as if they are resulted from one source (Fig. 5b). Also, the detected edges are greater than the actual edges. The TDR filter (Fig. 5c) exhibits high ability to balance deep and shallow sources but it could not determine the boundaries precisely. The results from Theta map (Fig. 5d) and TDX (Fig. 5e) filters seem similar. Although they balanced the anomalies from sources at different depths and showed sharp edge over them, but they gave edges much wider than reality. Moreover, the ETilt and ETHDR filters (Fig. 5f and g) display also wider boundaries. They produced false anomalies at the edge of the map. The proposed impTDX filter and its THDR (Fig. 5h and i) exhibit accurate and more precise boundaries over the edges of both shallow and deep bodies compared to other filters. The impTDX filter gives an image with a muted background where only the causative sources can be seen, which means it either reaches a maximum (a value of 1) above the source or a minimum (a value of -1) when it is outside. This can greatly facilitate the structural interpretation process.
In the second case, where a random noise was added to the magnetic data, the applied conventional filters (i.e., THDR (Fig. 7a), AS (Fig. 7b), TDR (Fig. 7c), Theta map (Fig. 7d), TDX (Fig. 7e), Etilt (Fig. 7f), and ETHDR (Fig. 7g)) in contrast to the impTDX filter (Fig. 7h) and its THDR (Fig. 7i), were significantly impacted by the noise. However, these edge detectors gave blurred boundaries of the modeled prismatic sources with a low resolution. Comparatively to other conventional filters, the ETilt and ETHDR filters were greatly influenced by additive noise. The outcome of using the suggested impTDX and THDR_impTDX edge detectors (Fig. 7h and i) demonstrates that, when compared to the other applied filters, the imaged edges appear to be the sharpest and the closest to the actual ones. Additionally, there are no fuzzy boundaries in the output result of the suggested method, which can simultaneously determine the high and low amplitude as well as shallow and deep edges. Despite the impTDX and the THDR_impTDX filters show a high efficacy in noisy data, they are still affected by this noise especially in the boundaries of the map. Upward continuation can be an option to reduce noise in cases when the data have high levels of noise.

a THDR, b AS, c TDR, d Theta, e TDX, f Etilt, g ETHDR, h impTDX, and i THDR_impTDX maps of the noisy synthetic magnetic data
4 Application to Magnetic Data from Sohag, Egypt
4.1 Geological and Structural Settings
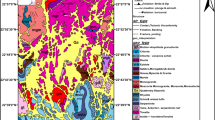
The study area (Fig. 8) is located between latitudes 26° 00′ 12.5″ and 27° 00′ 29.7″ N and longitudes 31° 26′ 47″ and 32° 03′ 32″ E in Egypt. The geological and structural settings of Sohag region have been discussed by several researchers (e.g., Abd El Aal et al., 2020; Abu Seif, 2015; Ghazala et al., 2018a, 2018b; Ibraheem et al., 2019, among others). The subsurface stratigraphic column of the area consists of sediments ranging from Late Cretaceous (Nubian sandstone) to Quaternary overlying unconformably the Precambrian basement rocks. At the Balyana-1 well, the Precambrian granitic basement surface was observed at a depth of 1640 m. (Ganoub El-Wadi Petroleum Holding Company, 1994; Ibraheem et al., 2019). However, Ghazala et al. (2018a) reported that the depths to the basement rocks at the study area range from 400 to 4000 m with an average value of 3500 m based on gravity and aeromagnetic data. They interpreted the basement structures as alternative horsts and grabens created by parallel fault sets.

Location and geology maps of the study area, Sohag, Nile valley, Egypt (after Conoco, 1987)
The surface geology consists of sedimentary sequence and ranges from Eocene to Quaternary (Abu Seif, 2015; Conoco, 1987) as shown in Fig. 8. The Nile Valley is bounded by limestone plateau (Lower Eocene) which is intersected by several drainage basins discharges from east to west towards the valley (Abd El Aal et al., 2020). The Lower Eocene is represented by the Thebes Formation made up of a thick laminated to massive limestone succession with chart bands and marl (Mahran et al., 2013). Drunka Formation covering Thebes Formation and consists of laminated limestone and interbeds of hard massive limestone and chart bands, moreover, it includes concretions of highly silicified limestone (Abu Seif, 2015). Issawia Formation (70 m of Pliocene–Pleistocene deposits) of brownish marl, clay, conglomerate, and limestone and is characterized by presence of hard red breccias at its top (Abu Seif, 2015; Said, 1990). It is covered with flood plain of mainly alluvium deposits along the Nile Valley's confined region. Quaternary sediments are composed of pre-Nile deposits, alluvial fanglomerates, Wadi deposits, and also Playa deposits. The topographic map of the area (Fig. 9) obtained from the Shuttle Radar Topography Mission (SRTM), Digital Elevation Model (DEM) reflects intermediate to high relief range from 39 to 517 m.

Topographic map of the study area obtained from the Shuttle Radar Topography Mission (SRTM), Digital Elevation Model (DEM)
Structurally, the investigated area is situated in the stable shelf of Egypt which is influenced by several faults in different four trends: E–W (Tethyan-Mediterranean trend), NE–SW (Aqaba trend), NW–SE (Gulf of Suez trend) and N–S. Intrusions of granodiorite have been also reported in the study area (Ghazala et al., 2018b). Youssef (1968) mentioned developed structural lineaments during the Pre-Paleozoic or earlier basement trends and later these features continued during Tertiary times. Moreover, several normal and strike slip faults dissect the Eocene plateau (Abd El Aal et al., 2020).
4.2 Aeromagnetic Data
The magnetic data have been measured by Aero Service Division of the Western Geophysical Company of America (1983). The collected data were taken at flight height of 914.4 m using an airborne Varian V-85 proton free-precession magnetometer with 0.1 nT sensitivity through parallel flight lines spacing 1.5 km directed NE–SW direction with 45°/225° azimuths. At 5 km intervals, tie lines were directed toward NW–SE trend normal to the main flight line's direction. The magnetic field`s declination was 2° E, while it`s inclination was 39.5° N. The data were gridded at 0.5 km cell size using the minimum curvature technique after being digitized from three magnetic sheets of 1/50,000 scale. To exclude the regional influences of the earth’s magnetic field, the values of the International Geomagnetic Reference Field (IGRF) were removed. In order to avoid undesirable distortion in the shapes, sizes, and locations of magnetic anomalies caused by the effect of the inclination and declination of the magnetic field, the data obtained was reduced to the north magnetic pole (RTP)—assuming only induced magnetization—by using fast Fourier transform (Fig. 10a).

a RTP magnetic map of Sohag region, b AS map, c impTDX map, and d THDR_impTDX map
Because of the impTDX filter equalizes the magnetic anomalies from different depths, we calculated the AS signal map in order to have an idea about the relative depths of the subsurface magnetic sources. Figure 10b shows the result of applying the AS filter to the magnetic anomaly data of the study area and Fig. 10c and d exhibit the results of applying the impTDX and the THDR_impTDX filters to the RTP magnetic data, respectively. The impTDX and the THDR_impTDX filters were able to image sharply several structures which couldn’t be seen on the RTP magnetic map. The boundaries of these structures refer to contacts/faults and/or intrusions of the basement. Figure 11 represents the interpreted structural framework of the area based on the joint interpretation of the impTDX (Fig. 10c), the THDR_impTDX (Fig. 10d), and the AS (Fig. 10b) maps. The obtained structural map emphasizes the presence of three main sets of structural trends in the area: NNW–SSE, NW–SE, and NE–SW that have had a major impact on the structural framework of the region. It also remarks that the River Nile’s course in this area of Egypt is significantly influenced by these tectonic events especially in the area north and east of Sohag and Gerga cities where the river follows the tectonic trends.

Interpreted structural map of the study area deduced from impTDX and THDR_impTDX maps
The inferred structures reflect magnetic sources associated with basement blocks of varied depths as clarified from the width and amplitudes of the AS anomalies that related to the depth of the magnetic sources. The structural map shows normal faults which delimiting the causative high and low structures (horsts H1–H5 and grabens G1–G4) and lateral dissecting faults. G2 clearly represents the narrow Nile graben which is dissected by lateral faults and bordered by the horsts H1, H4, and H5. This agrees with Meshref (1990), Mohamed (2021), Said (1981, 1990, 1994), Woodward et al., (2022), Yousif (1968), and others whom believed the tectonic origin of the Nile grabens which are related to the Red Sea opening. It is worth to state that some of the interpreted subsurface faults east and west the Nile valley are expressed in the topographic map (Fig. 9). The obtained structural map can help in understanding the tectonics of the region and the evaluation of the Nile valley.
5 Conclusions
A novel filter called impTXD has been introduced for more precise locating and revealing the boundaries of subsurface causative magnetic sources. Its total horizontal derivative (THDR_impTDX) was suggested as an edge detector as well. On both noise-free and noise-contaminated synthetic magnetic data sets, as well as measured magnetic data from Sohag area, Egypt, the proposed filters have been applied and tested. The efficiency and effectiveness of the new approaches were evaluated in comparison to other well-known edge detectors. When compared to existing edge detectors, our filters provide results that are more precise, high-resolution, and capable of resolving the diffusion issue of the anomaly’s edges. The impTDX filter is capable of detecting sharply sources of weak and strong anomalies at both shallow and deep depths. Furthermore, it is much less sensitive to noise in the data than other filters. Additionally, it can detect clearly adjacent and superimposed sources. Hence, the novel impTDX edge detector and its THDR represent a fast and powerful tool for subsurface imaging of buried causative sources. By applying the new filter to the aeromagnetic field data of Sohag, Egypt, the edges of magnetic sources have been sharply resolved. The impTDX, the THDR_impTDX, and the AS results were jointly interpreted to construct a structural map. Three sets of fault directions—NNW–SSE, NW–SE, and NE–SW—are clearly identified on this map. The findings indicate that the Nile River is structurally controlled, particularly in the areas around the cities of Sohag and Gerga.
Data Availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Abd El Aal, A. K., Nabawy, B. S., Aqeel, A., & Abidi, A. (2020). Geohazards assessment of the karstified limestone cliffs for safe urban constructions, Sohag, West Nile Valley. Journal of African Earth Sciences, 161, 103671. https://doi.org/10.1016/j.jafrearsci.2019.103671
Aero Service Division of the Western Geophysical Company of America, (1983). The Total Magnetic Intensity Map of Egypt. Scale of 1: 50000, Aero Service Division of the Western Geophysical Company of America: San Diego
Alarifi, S. S. (2022). Structural implications of potential field data on Southeastern North America. Journal of Geophysics and Engineering, 19(2), 142–156. https://doi.org/10.1093/jge/gxac005
Alrefaee, H. A., Soliman, M. R., & Merghelani, T. A. (2022). Interpretation of the subsurface tectonic setting of the Natrun Basin, north Western Desert, Egypt using Satellite Bouguer gravity and magnetic data. Journal of African Earth Sciences, 187, 104450. https://doi.org/10.1016/j.jafrearsci.2022.104450
Arisoy, M. Ö., & Dinkmen, Ü. (2013). Edge detection of magnetic sources using enhanced total horizontal derivative of the tilt angle. Yerbilimleri, 34(1), 73–82.
Chen, Q., Dong, Y., Tan, X., Yan, S., Chen, H., Wang, J., Wang, J., Huang, Z., & Xu, H. (2022). Application of extended tilt angle and its 3D Euler deconvolution to gravity data from the Longmenshan thrust belt and adjacent areas. Journal of Applied Geophysics. https://doi.org/10.1016/j.jappgeo.2022.104769
Chen, T., & Zhang, G. (2022). NHF as an Edge Detector of Potential Field Data and Its Application in the Yili Basin. Minerals, 12(2), 149. https://doi.org/10.3390/min12020149
Conoco (1987). Geological map of Egypt, NG 36 NW Asyut. Scale 1:500000. The Egyptian General Petroleum Corporation. Conoco Coral, Cairo, Egypt
Cooper, G. R. (2014). Reducing the dependence of the analytic signal amplitude of aeromagnetic data on the source vector direction. Geophysics, 79, J55–J60. https://doi.org/10.1190/geo2013-0319.1
Cooper, G. R. J., & Cowan, D. R. (2006). Enhancing potential field data using filters based on the local phase. Computers and Geosciences, 32(10), 1585–1591. https://doi.org/10.1016/j.cageo.2006.02.016
Cordell, L., & Grauch, V. J. S. (1985). Mapping basement magnetization zones from aeromagnetic data in the San Juan Basin, New Mexico. The Utility of Regional Gravity and Magnetic Anomaly Maps. https://doi.org/10.1190/1.0931830346.ch16
Dwivedi, D., & Chamoli, A. (2021). Source edge detection of potential field data using wavelet decomposition. Pure and Applied Geophysics, 178(3), 919–938. https://doi.org/10.1007/s00024-021-02675-5
Ferreira, F. J., de Souza, J., de Bongiolo, B. E. S. A., & de Castro, L. G. (2013). Enhancement of the total horizontal gradient of magnetic anomalies using the tilt angle. Geophysics, 78(3), J33–J41. https://doi.org/10.1190/geo2011-0441.1
Ganoub El-Wadi Petroleum Holding Company. (1994). Geological report of the balyana-1 Well. The Egyptian General Petroleum Corporation.
Ghazala, H. H., Ibraheem, I. M., Haggag, M., & Lamees, M. (2018a). An integrated approach to evaluate the possibility of urban development around Sohag Governorate, Egypt, using potential field data. Arabian Journal of Geosciences, 11(9), 1–19. https://doi.org/10.1007/s12517-018-3535-1
Ghazala, H. H., Ibraheem, I. M., Lamees, M., & Haggag, M. (2018b). Structural study using 2D modeling of the potential field data and GIS technique in Sohag Governorate and its surroundings, Upper Egypt. NRIAG Journal of Astronomy and Geophysics, 7(2), 334–346. https://doi.org/10.1016/j.nrjag.2018.05.008
Ibraheem, I. M., Aladad, H., Alnaser, M. F., & Stephenson, R. (2021). IAS: a new novel phase-based filter for detection of unexploded ordnances. Remote Sensing, 13(21), 4345. https://doi.org/10.3390/rs13214345
Ibraheem, I. M., Elawadi, E., & El-Qadi, G. (2018a). Structural interpretation of aeromagnetic data from the Wadi El Natrun area, northwestern Desert. Egypt. Journal of African Earth Sciences, 139, 14–25. https://doi.org/10.1016/j.jafrearsci.2017.11.036
Ibraheem, I. M., El-Husseiny, A. A., & Othman, A. A. (2022). Structural and mineral exploration study at the transition zone between the North and the Central Eastern Desert, Egypt, using airborne magnetic and gamma-ray spectrometric data. Geocarto International. https://doi.org/10.1080/10106049.2022.2076915
Ibraheem, I. M., Gurk, M., Tougiannidis, N., & Tezkan, B. (2018b). Subsurface imaging of the Neogene Mygdonian basin, Greece using magnetic data. Pure and Applied Geophysics, 175(8), 2955–2973. https://doi.org/10.1007/s00024-018-1809-x
Ibraheem, I. M., Haggag, M., & Tezkan, B. (2019). Edge detectors as structural imaging tools using aeromagnetic data: a case study of Sohag area. Egypt. Geosciences, 9(5), 211. https://doi.org/10.3390/geosciences9050211
Li, J., Zhang, Y., Fan, H., Li, Z., & Liu, M. (2019). Estimating the location of magnetic sources using magnetic gradient tensor data. Exploration Geophysics, 50(6), 1–13. https://doi.org/10.1080/08123985.2019.1615834
Ma, G., Liu, C., & Li, L. (2014). Balanced horizontal derivative of potential field data to recognize the edges and estimate location parameters of the source. Journal of Applied Geophysics, 108, 12–18. https://doi.org/10.1016/j.jappgeo.2014.06.005
Mahran, T. M., El-Shater, A., Youssef, A. M., & El-Haddad, B. A. (2013). Facies analysis and tectonic-climatic controls of the development of Pre-Eonile and Eonile sediments of the Egyptian Nile west of Sohag. In the 7th international conference on the geology of Africa, Assiut, Egypt.
Meshref, W. (1990). Tectonic Framework of Egypt. In R. Said (Ed.), The Geology of Egypt (pp. 113–155). Balkema/Rotterdam/Bookfield.
Miller, H. G., & Singh, V. (1994). Potential field tilt—a new concept for location of potential field sources. Journal of Applied Geophysics, 32, 213–217. https://doi.org/10.1016/0926-9851(94)90022-1
Mohamed, H. S. (2021). Structural pattern along the course of the Nile Valley opposite El-Balyana, Upper Egypt, using gravity and magnetic data. Arabian Journal of Geosciences, 14, 897. https://doi.org/10.1007/s12517-021-07168-2
Mohamed, H. S., & Zaher, M. A. (2020). Subsurface structural features of the basement complex and geothermal resources using aeromagnetic data in the bahariya oasis, western desert. Egypt. Pure and Applied Geophysics, 177, 2791–2802. https://doi.org/10.1007/s00024-019-02369-z
Napoli, R., Currenti, G., & Sicali, A. (2021). Magnetic signatures of subsurface faults on the northern upper flank of Mt Etna (Italy). Annals of Geophysics. https://doi.org/10.4401/ag-8582
Nasuti, Y., & Nasuti, A. (2018). NTilt as an improved enhanced tilt derivative filter for edge detection of potential field anomalies. Geophysical Journal International, 214(1), 36–45. https://doi.org/10.1093/gji/ggy117
Nasuti, Y., Nasuti, A., & Moghadas, D. (2019). STDR: a novel approach for enhancing and edge detection of potential field data. Pure and Applied Geophysics, 176, 827–841. https://doi.org/10.1007/s00024-018-2016-5
Prasad, K. N. D., Pham, L. T., & Singh, A. P. (2022). A novel filter “ImpTAHG” for edge detection and a case study from cambay rift basin. Pure and Applied Geophysics. https://doi.org/10.1007/s00024-022-03059-z
Roest, W. R., Verhoef, J., & Pilkington, M. (1992). Magnetic interpretation using the 3-D analytic signal. Geophysics, 57(1), 116–125. https://doi.org/10.1190/1.1443174
Said, R. (1981). The Geological Evolution of the River Nile (p. 151). New York: Springer-Verlag.
Said, R. (1990). The geology of Egypt. Balkema, Rotterdam, Brookfield: S.A, 731 P
Said, R. (1994). Origin and evolution of the Nile. In P. Howell & J. Allan (Eds.), The nile: sharing a scarce resource: a historical and technical review of water management and of economical and legal issues (pp. 17–26). Cambridge: Cambridge University Press.
Seif, A., & El-S, S. (2015). Geological evolution of Nile Valley, west Sohag, Upper Egypt: A geotechnical perception. Arabian Journal of Geosciences, 8(12), 11049–11072. https://doi.org/10.1007/s12517-015-1966-5
Uluğtekin, M., Gönenç, T., & Özdağ, Ö. C. (2022). Examining several edge detection techniques in gravity method together with 3D bedrock topography: a case study from the northern part of the İzmir/Turkey. Journal of Earth System Science, 131, 144. https://doi.org/10.1007/s12040-022-01891-4
Verduzco, B., Fairhead, J. D., Green, C. M., & MacKenzie, C. (2004). New insights into magnetic derivatives for structural mapping. The Leading Edge, 23(2), 116–119. https://doi.org/10.1190/1.1651454
Wijns, C., Perez, C., & Kowalczyk, P. (2005). Theta map: Edge detection in magnetic data. Geophysics, 70(4), 39–43. https://doi.org/10.1190/1.1988184
Woodward, J. C., Macklin, M. G., Krom, M. D., & Williams, M. A. J. (2022). The river nile: Evolution and environment. In A. Gupta (Ed.), Large rivers: Geomorphology and management (2nd ed., pp. 388–432). Hoboken: Wiley-Blackwell. https://doi.org/10.1002/9781119412632.ch14
Youssef, M. I. (1968). Structural pattern of Egypt and its interpretation. AAPG Bulletin, 52(4), 601–614. https://doi.org/10.1306/5D25C44D-16C1-11D7-8645000102C1865D
Zhu, Y., Wang, W., Farquharson, C. G., Huang, J., Zhang, M., Yang, M., & Wang, D. (2021). Normalized vertical derivatives in the edge enhancement of maximum-edge-recognition methods in potential fields. Geophysics, 86(4), G23–G34. https://doi.org/10.1190/geo2020-0165.1
Acknowledgements
The authors would like to thank the German Research Foundation (DFG) for funding the project (Grant number: TE 170/21-1).
Funding
Open Access funding enabled and organized by Projekt DEAL. This work was supported by German Research Foundation (DFG) (Grant number: TE 170/21-1).
Author information
Authors and Affiliations
Contributions
Conceptualization, I.M.I.; methodology and software, I.M.I. & A.A.O.; validation, I.M.I, B.T., & H.G.; investigation, I.M.I; data curation, I.M.I; writing—original draft preparation, I.M.I., A.A.O., & H.G; writing—review and editing, I.M.I & B.T.; visualization, I.M.I. and A.A.O.; funding acquisition, I.M.I and B.T. All authors actively discussed, reviewed and approved the final version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Conflict of Interests
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ibraheem, I.M., Tezkan, B., Ghazala, H. et al. A New Edge Enhancement Filter for the Interpretation of Magnetic Field Data. Pure Appl. Geophys. 180, 2223–2240 (2023). https://doi.org/10.1007/s00024-023-03249-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00024-023-03249-3