
Abstract
The paper presents an example of using photographs taken by unmanned aerial vehicles (UAV) and processed using the structure from motion (SfM) procedure in a geomorphological study of rock relief. Subject to analysis is a small rock city in the West Sudetes (SW Poland), known as Starościńskie Skały and developed in coarse granite bedrock. The aims of this paper were, first, to compare UAV/SfM-derived data with the cartographical image based on the traditional geomorphological field-mapping methods and the digital elevation model derived from airborne laser scanning (ALS). Second, to test if the proposed combination of UAV and SfM methods may be helpful in recognizing the detailed structure of granite tors. As a result of conducted UAV flights and digital image post-processing in AgiSoft software, it was possible to obtain datasets (dense point cloud, texture model, orthophotomap, bare-ground-type digital terrain model—DTM) which allowed to visualize in detail the surface of the study area. In consequence, it was possible to distinguish even the very small forms of rock surface microrelief: joints, aplite veins, rills and karren, weathering pits, etc., otherwise difficult to map and measure. The study includes also valorization of particular datasets concerning microtopography and allows to discuss indisputable advantages of using the UAV/SfM-based DTM in geomorphic studies of tors and rock cities, even those located within forest as in the presented case study.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Among characteristic elements of granite landscapes are isolated solid rock residuals known as tors. They may also form clusters or occasionally combine into more complicated landform assemblages called rock cities (Migoń et al. 2017). Their existence is connected with spatial variability of bedrock geological features, mainly jointing patterns, whereas joints also control the shape, evolution and patterns of degradation of individual tors (Linton 1955; Jahn 1974; Dumanowski 1968; Migoń 1996, 2006; Twidale and Vidal Romani 2005). These structural conditions have long been surveyed through traditional geological and geomorphological mapping, occasionally aided by interpretation of aerial photographs where the absence of vegetation allowed one to do this. Fieldwork is usually based on ground-level observations, including geological compass measurements. More recently, this type of studies may involve an analysis of high-resolution (1 × 1 m or more) digital terrain models (DTMs). These datasets are usually derived from airborne laser scanning (ALS)—a method which, in recent years, allowed for a dynamic progress in representing and modeling of Earth surface (e.g. Höfle and Rutzinger 2011; Bishop 2013; Migoń et al. 2013), especially within inaccessible areas or those of complex relief.
In certain situations the ALS data can be substituted by photogrammetric methods using unmanned aerial vehicles (UAV) and digital image post-processing technique known as structure from motion (SfM). This combination appears to be cheap and efficient and thus, the use of these methods is currently becoming increasingly popular, mainly in case studies focused on small objects or areas (e.g. James and Varley 2012; Hugenholtz et al. 2013; Mancini et al. 2013; Lucieer et al. 2014; Ryan et al. 2015; Clapuyt et al. 2016; Cook 2017; Dąbski et al. 2017; Marteau et al. 2017; Miziński and Niedzielski 2017). This paper presents a case study which aims to determine to what extent the use of UAV and SfM methods can help to recognize the geomorphological structure of granite tors and supplement landform inventory attempted through traditional methods. The reference object in this study is the Starościńskie Skały rock city in Rudawy Janowickie Mts. (Sudetes, SW Poland, Fig. 1), recently subject to detailed mapping using the combination of traditional field-based geomorphological mapping (Michniewicz et al. 2016). The latter was based on high-resolution, 1 × 1 m LiDAR-based DTM, which was produced in years 2010–2014 for most part of the area of Poland (Wężyk 2014). Aside from the intention to gather new information about the morphology of the particular group of tors, the main objective of this study was to compare the potentially available methods and datasets concerning granite tors in terms of the degree of detail returned. Contrary to some high altitude, treeless areas where tors occur, this analysis concerns objects located within a forest. Consequently, both field mapping and measurements as well as spatial data post-processing were far more difficult and extra problems had to be solved.

Granite rock city of the Starościńskie Skały tors in the Rudawy Janowickie in the Sudetes, SW Poland (photo M. Kasprzak)
2 Methods
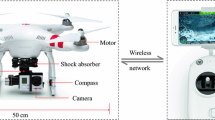
The main dataset used in this study is the digital model of the tor group, prepared on the basis of aerial photography. The digital images of 4000 × 3000 px resolution were made by DJI Phantom 3 Professional quadrocopter. It is equipped with the digital camera of 1/2.3″ CMOS sensor, 94° field of view, 20 mm (35 mm format equivalent) focal length and f/2.8 focus (Phantom 3 Professional 2015). Flights during which the photos were taken were conducted on 7th March 2017. The time of flights was set before the start of vegetation season and was carried out in the presence of stable wind conditions, sufficient visibility and lack of snow cover. In order to obtain appropriate image coverage of the study area as well as the high level of detail, orthogonal photos were taken during three consecutive flights at the altitude of 80, 50 and 30 m above the starting point (ca. 65, 35 and 15 m above the top of the highest tor). Additionally, oblique photos were taken during the flight around the group of tors in order to provide information about areas invisible directly from above.
The aforementioned fieldwork yielded a set of 239 digital images, which were used as an input data in the process of digital terrain model creation with the use of SfM method. The essence of SfM lies in using the rules of stereoscopy—a series of overlapped images enables creation of a three-dimensional model. Contrary to traditional photogrammetry, information about camera position and angle is unnecessary (however, the camera position was registered by the UAV built-in GPS/GLONASS receiver), as these data are determined automatically during the performance of an algorithm for identification and matching points from particular images. This first stage of processing results in a sparse point cloud, which is subsequently processed into a dense point cloud—a dataset conveying detailed features of the photographed object (shape and color). Further stages of model creation include generation of mesh and image rendering. The whole procedure is described by Westoby et al. (2012) and Eltner et al. (2016).
The software used in this study is Agisoft Photoscan Professional Edition (Agisoft 2016). The SfM procedure resulted in a point cloud of highest possible density (ultra-high). Next, the point cloud was automatically classified to retrieve a subset of ground-level points. Nevertheless, manual removal of points which in fact represented leaves or tree trunks proved necessary to achieve a better representation of rock surfaces. However, in some areas it was not technically possible. During the data pre-processing, the coordinates of ground control points were added in order to set the model more accurately in geographical space and to prevent potential shape representation errors (Barry and Coakley 2013; James and Robson 2014; Jóźków and Toth 2014; Tonkin and Midgley 2016). Five ground control points (GCP) were marked during fieldwork—they were purposefully set in well-exposed locations (not covered by tree crowns), four of them around the tor group and one in its central point. The coordinates of these control points were measured by GPS RTK (Trimble) device, with the decimeter accuracy.
The whole digital processing procedure resulted in the following data: dense point cloud, texture model, digital terrain model (DTM) and orthophotomap. Subsequently, these datasets were used in the analysis of micromorphology of rock surfaces and enabled a comparison with the results of traditional, ground-based geomorphological mapping (Michniewicz et al. 2016) and with the LiDAR-based DTM of 1 × 1 m resolution. This reference dataset is a bare ground type model, which was derived from the ALS point cloud of density 4–6 pts/m2; its horizontal mean error is less than 0.5 m and mean vertical error does not exceed 0.15 m (Wężyk 2014). For purpose of this study both DTMs (UAV/SfM-based and LiDAR-based) were visualized. The UAV/SfM with LiDAR-based DEMs comparison was created in the form of DEMs of difference (DoD). Furthermore, three selected cross-profiles were analyzed to indicate differences between both models. In addition, error measures (absolute errors and RMSE of X, Y and Z coordinates) for ground control points were calculated.
2.1 Study Area
The study area is the summit part of the Mt. Lwia Góra (718 m a.s.l.) located in the Rudawy Janowickie ridge—a distinctive geomorphic unit of the West Sudetes (Fig. 2) in the Bohemian Massif. Bedrock in this section of the Rudawy Janowickie is composed of Carboniferous granite, with porphyritic structure (Szałamacha 1969; Sobczyk et al. 2015). The Starościńskie Skały tor group has developed in the most elevated part of Mt. Lwia Góra and consists of many isolated tors separated by wide-opened clefts (Fig. 3). This tor group is a rare example of ‘rock city’ which is an intermediate granitic landform between smaller simple tors and larger dome-shaped bornhardts. This type of rock formation is more common in the sandstone areas and the ‘rock city’ formed in the granite bedrock is a rare case. The tor group is 180 m long and has a complex structure, both in vertical and horizontal dimensions. In plan the Starościńskie Skały group divides into two sections, different in terms of morphology and size—the wide (85 m) southeastern part and the relatively narrow northwestern part (25 m). Additionally, the former is characterized by hierarchical structure and include a dome-shaped pedestal, at the top of which smaller tors have developed (Michniewicz et al. 2016). The internal morphology of tors is diverse so that rock towers, pulpits, needles and ridges occur. The height of the singular rock forms is from 9 to 11 m and the highest one (Starościńska Skała tor) reaches 30 m. The morphology of the southeastern part resembles granite domes which are known forms in the adjacent Jelenia Góra Basin (Migoń 1993, 2007), however, it is not a freestanding bornhardt rising above a level surface. A specific feature of this tor group is the abundance of microforms which have survived in the southeastern section. Several forms have been identified like flared slopes, weathering pits and karren (Michniewicz et al. 2016).

Location map of the Mt. Lwia Góra in the Rudawy Janowickie Mts

3 Results
The study resulted in a UAV/SfM-based DTM of the Mt. Lwia Góra surface, representing the Starościńskie Skały tor group. The final raster version of DTM was based on a dense point cloud consisting of 63 million points and the raster resolution is ca. 0.015 × 0.015 m. In consequence, the number of topographic details of the rock surfaces represented by the model is much greater comparing to the LiDAR-based DTM (Fig. 4). The UAV/SfM-based DTM is a bare-ground-type model and areas, where the unequivocal recognition of points representing land-surface was impossible, were excluded from interpolation. Hence, blank areas appear on the model visualization (Fig. 4b). The basic model properties are presented in Table 1.

The comparison between LiDAR-based DTM and UAV/SfM-based DTM. Holes in the model result from the lack of data (ground points under forest undergrowth)
A direct comparison between DTMs of the studied area (DoD in Fig. 5) indicates significant differences in imaged tors up to a few (max 10) meters. These differences mainly refer to edges of individual tors as well as concave rock walls and their feet, which are not correctly represented on the LiDAR-based DTM.

DEMs of difference (DoD): altitude differences between UAV/SfM-based DTM and LiDAR-based DTM
The resolution of the UAV/SfM-based DTM is almost two orders of magnitude greater when compared to the LiDAR-based DTM. In consequence, the former not only represents better the height of particular tors, but also their shapes which can be observed on cross-profiles (Fig. 6). Significant improvement of representation of surface details can be observed in case of spires. Moreover, it is possible to visualize in detail all forms of microrelief developed within rock walls as well as small objects located at the rock wall base, such as blocks or boulders. Measurement errors based on ground control points are negligible (Table 2) and indicate correct alignment of tors to reality. The root mean square error (RMSE) of altitude is strongly dependent on taking into account in the calculation of GCP no. 3 due its specific location.

Profiles across tors derived from UAV/SfM-based DTM (colored lines) and LiDAR-based DTM (gray lines). Locations of the crosssections are shown in Fig. 3. Dotted lines show main joints responsible for the shape of the granite dome
An indisputable advantage of UAV/SfM-based elevation data is that they, contrary to the results of field geomorphological mapping, provide detailed information about inaccessible top surfaces of tors (Fig. 7). The model well represents rock surfaces even within clefts or concave bends of rocky surfaces. However, the DTM cannot properly represent surface in areas located underneath dense vegetation cover (coniferous trees, bigger broad-leaved trees or dense bushes). Observations of local microrelief, based on the UAV/SfM model, are presented below using specific examples (Fig. 8).

The perspective view of the model of the Starościńskie Skały rock city. Letter tags indicate rock surfaces shown in Fig. 8

Main features of the Starościńskie Skały microrelief imaged by UAV/SfM-based DTM. Explanations in the text
3.1 Tops of Tors
Morphology of tops of tors depends on the density of joints within a specific granite block. Some tors have relatively oval tops (e.g. Widokowa tor), whereas others are crowned with ridges or singular rounded boulders (Fig. 8a–c). Also, weathering pits were developed practically in all locations where the tops of tors are formed by planar, structurally determined surfaces.
3.2 Joints
There are a few joint systems within the Starościńskie Skały rock city. In general, the spatial pattern of rock residuals within the group of tors is controlled by WNW–ESE trending vertical joints (strike 107°–112°), along which corridors were excavated through preferential weathering. They now separate particular rows of tors. These joints cross with the second system of joints (strike 175°–180°) at an acute angle. The third set is trending N60°E and is particularly visible within the southernmost tor. An important element of joint network is constituted by concentrically arranged, broadly surface-parallel joints (sheeting joints). They are exposed especially within the southeastern part of the tor group, mainly near the edges of rock walls (see also in Fig. 6). Sheeting joints, whose spacing does not exceed 1 m, locally overlap with or grade into horizontal partings known as pseudobedding. The visualization of UAV/SfM-based DTM shows very clearly the contrast between joint density of particular rock walls (Fig. 8d–f). It is possible to distinguish major joints, which separate individual tors, and minor joints which diversify the morphology of rock walls.
3.3 Rills and Karrens
On the steeply inclined rock surfaces, the UAV/SfM-based DTM represents in detail linear erosional forms likely developed by periodic water flow. Elongated rills (with lengths 0.4–9.0 m and widths 0.1–1.0 m), some with funnel-like shapes at the points of origin, may be determined by the occurrence of joints so that trickling water exploits a line of structural weakness (Fig. 8g). Likewise, joints may also determine size and density of rills (Fig. 8h). Well-developed rills and karren create a fan-shaped system on the rock wall located east of the Starościńska Igła tor (Fig. 8i). However, their pattern is clearly affected by a diagonal aplite vein.
3.4 Weathering Pits
Weathering pits are a common element of microrelief within the Starościńskie Skały tor group. The biggest pits have diameter up to 1 m and are 0.4–0.5 m deep. Apart from pits previously mapped from the ground, the analysis of the UAV/SfM-based DTM enabled us to detect two big (0.5 m diameter) weathering pits which were not documented before (Michniewicz et al. 2016). Both pits are located on tops of tors. High resolution and precision of the DTM enables also to depict shapes of singular pits, including secondary hollows within their floors (Fig. 8j).
3.5 Artificial Forms
The UAV/SfM-based DTM shows the steps carved in the granite surface, which lead to the view-point on the Widokowa tor (Fig. 8m, n). The railings and an information board which are located on this tor are not represented on the model, as they are elements of land cover. Consequently, points corresponding to these objects were manually removed during data processing.
3.6 Other Objects
The UAV/SfM-based datasets allow also for identification of other, minor forms, which were not mentioned earlier. The three-dimensional visualization of the dense point cloud or textured mesh (as in Fig. 7) reveals the locations of overhangs (flared slopes). Aplite veins and pegmatites can be distinguished as their texture differs from the texture of the adjacent granite surfaces. The land surface next to the tors is strewn by numerous blocks and boulders (Fig. 8o), which are usually products of rockfall from the rock outcrops or walls. As it was impossible to filter-out all of the elements of land cover, one can notice that singular fallen tree trunks are represented in detail on the DTM.
Using the observations reported above as a base, it is possible to offer valorization of particular data sources concerning morphology of singular tors or groups of tors, as presented in Table 3.
4 Discussion and Conclusions
This study is the first ever example of using UAV and SfM in analysis of relief within the rock city. Methodically similar case studies focusing on rock surfaces are not numerous. The work is the closest to aims and results obtained by Cruden et al. (2016) who mapped geometry of dykes and dykes network on a wavecut platform at Bingie Bingie point in New South Wales (Australia) using UAV/SfM-based DTM with resolution less than 1 × 1 cm. The broader context of this work was to determine how magma flow was channelized in such networks and how sulfide liquids become trapped in channels to form magmatic sulfide deposits. In similar way Vollgger and Cruden (2016) mapped folds in rocky Cape Liptrap and Cape Peterson in Victoria (Australia). They used high-resolution (7.7 × 7.7 mm) DTM for this purpose. Moreover, basing on the 2.7 × 2.7 cm DTM Chesley et al. (2017) characterized sedimentary outcrops in Utah (USA). All mentioned authors focused on structural properties of rocks, no works focused on geomorphological properties of the tors have been done so far. Nevertheless, it seems very likely that the increasing popularity of UAV in general and low costs of acquiring the SfM-based elevation data will result in the development of similar studies concerning micromorphology of poorly accessible tor groups.
It also emerges from our study that the capabilities of methods used are not unlimited and the results achieved contain errors and artifacts. Photos taken by the UAV, even though they were taken from various altitudes and angles (James et al. 2017a, b), were not sufficient to represent the whole land-surface within the study area. Proper terrain representation was impossible in areas covered by dense vegetation at the base of tors or in some clefts. These areas were left empty (NoData) as any method of interpolation or artificial image replication would not be warranted due to very high resolution and very high level of details of UAV/SfM-based DTM. Probably the only possibility to digitally represent the land-surface of these areas is to multiply UAV surveys and, primarily, use photos taken manually from the ground level. However, even then it could be very difficult due to terrain complexity, slope steepness and dense vegetation. Covering a land-surface by bushes and tree crowns is also important obstacle to correct placement of ground control points in the field.
Another difficulty which appeared during data processing was the necessity to remove manually points which represented elements of land cover close to rock walls. The experiments with automated filtration of the point cloud did not provide acceptable results. Hence, working out the geometrically correct and artifact-free DTM was the most time-consuming stage of the whole data processing procedure.
There are well-known limitations and systematical errors connected with the SfM procedure, including predisposition to vertical ‘doming’ of the DTMs surface. They result from the combination of near-parallel imaging directions and inaccurate correction of radial lens distortion (James and Robson 2014). In order to reduce the probability of occurrence of these errors, the authors of this study used GPS-calibrated ground control points. A location of the GCP in the field caused some difficulties, mentioned above. The GCP error measures (Table 2) and an instance of point no. 3 showed that points should not be placed on convex, isolated and relatively small tors.
Notwithstanding the aforementioned limitations of the UAV/SfM-based DTM, the obtained model of group of tors is so detailed that it allows to analyze the microforms developed on the rock surfaces in a similar manner to observations gathered during conventional field mapping. Comparing to the traditional geomorphological mapping, the use of DTM solves the problem concerning mapping of the highest, steepest parts of tors and their tops. It allows to analyze the joint system while minimizing the potential distortion of perspective from the observation point. Thus, it also minimizes the risk of subjective and improper estimation of directions and density of joints in cases when the use of geological compass is impossible. A high level of surface detail representation enables one to distinguish locations of veins, erosional microforms or even small hollows at the bottoms of weathering pits. In sum, it can be stated that the datasets obtained with the use of UAV/SfM methods (dense point cloud, texture, orthophotomap, DTM) represent rock surfaces with a very high accuracy that allows to determine all minor features characteristic of the rocky relief within the granite area (Figs. 7, 8).
The DTM obtained for the purpose of this case study surpasses the LiDAR-based DTM in terms of the detail involved. It should be emphasized that the airborne LiDAR-based elevation data have recently resulted in a certain breakthrough in geomorphological studies on forested slopes of the Sudetes (Migoń et al. 2013). As the UAV/SfM methods enable considerable improvement of digital surface representation, they may be successfully applied as a supplement to existing elevation models of lower resolution. This combination is especially recommended for areas with numerous rock outcrops, tors or rock cities, e.g. areas with extreme terrain complexity. They are represented in existing cartographical data in a very simplified or clearly inaccurate way (see an example from sandstone landscape given by Migoń and Kasprzak 2015).
References
Agisoft. (2016). Agisoft photoscan user manual: Professional (p. 97). St. Petersburg: Agisoft LLC.
Barry, P., & Coakley, R. (2013). Accuracy of UAV photogrammetry compared with network RTK GPS. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2, 27–31.
Bishop, M. P. (2013). Remote sensing and GIScience in geomorphology: Introduction and overview. In J. Shroder & M. P. Bishop (Eds.), Treatise on Geomorphology. Remote Sensing and GIScience in Geomorphology (Vol. 3, pp. 1–24). San Diego: Academic Press.
Chesley, J. T., Leier, A. L., White, S., & Torres, R. (2017). Using unmanned aerial vehicles and structure-from-motion photogrammetry to characterize sedimentary outcrops: An example from the Morrison Formation, Utah, USA. Sedimentary Geology, 354(2017), 1–8.
Clapuyt, F., Vanacker, V., & Van Oost, K. (2016). Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology, 260, 4–15.
Cook, K. L. (2017). An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology, 278, 195–208.
Cruden, A., Vollgger, S., Dering, G., & Micklethwaite, S. (2016). High spatial resolution mapping of dykes using unmanned aerial vehicle (UAV) photogrammetry: New insights on emplacement processes. Acta Geologica Sinica (English Edition), 90(Supp. 1), 52–53.
Dąbski, M., Zmarz, A., Korczak-Abshire, M., Karsznia, I., & Chwedorzewska, K. J. (2017). UAV-based detection and spatial analyses of periglacial landforms on Demay Point (King George Island, South Shetland Islands, Antarctica). Geomorphology, 290, 29–38.
Dumanowski, B. (1968). The influence of petrographical differentiation of granitoids on landforms. Geographia Polonica, 14, 93–98.
Eltner, A., Kaiser, A., Castillo, C., Rock, G., Neugirg, F., & Abellán, A. (2016). Image-based surface reconstruction in geomorphometry—merits, limits and developments. Earth Surface Dynamics, 4, 359–389.
Höfle, B., & Rutzinger, M. (2011). Topographic airborne LiDAR in geomorphology: a technological perspective. Zeitschrift für Geomorphologie, 55(Suppl. 2), 1–29.
Hugenholtz, C. H., Whitehead, K., Brown, O. W., Barchyn, T. E., Moorman, B. J., Le Clair, A., et al. (2013). Geomorphological mapping with a small unmanned aircraft system (sUAS): feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model. Geomorphology, 194, 16–24.
Jahn, A. (1974). Granite tors in the Sudeten Mountains. In E. H. Brown & R. S. Waters (Eds.), Progress in Geomorphology (Vol. 7, pp. 53–61). London: Institute of British Geographers, Special Publication.
James, M. R., & Robson, S. (2014). Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surface Processes and Landforms, 39, 1413–1420.
James, M. R., Robson, S., d’Oleire-Oltmanns, S., & Niethammer, U. (2017a). Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology, 280, 51–66.
James, M. R., Robson, S., & Smith, M. (2017b). 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: precision maps for ground control and directly georeferenced surveys. Earth Surface Processes and Landforms, 42, 1769–1788.
James, M. R., & Varley, N. (2012). Identification of structural controls in an active lava dome with high resolution DEMs: Volcán de Colima, Mexico. Geophysical Research Letters, 39, L22303.
Jóźków, G., & Toth, C. (2014). Georeferencing experiments with UAS imagery. ISPRS Annals of the Photogrammetry, Remote Sensing, and Spatial Information Sciences, II(1), 25–29.
Linton, D. (1955). The problem of tors. Geographical Journal, 121, 470–487.
Lucieer, A., de Long, S. M., & Turner, D. (2014). Mapping landslide displacements using structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Progress in Physical Geography, 38, 97–116.
Mancini, F., Dubbini, M., Gattelli, M., Stecchi, F., Fabbri, S., & Gabbianelli, G. (2013). Using unmanned aerial vehicles (UAV) for High-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sensing, 5, 6880–6898.
Marteau, B., Vericat, D., Gibbins, C., Batalla, R. J., & Green, D. R. (2017). Application of Structure-from-Motion photogrammetry to river restoration. Earth Surface Processes and Landforms, 42, 503–515.
Michniewicz, A., Jancewicz, K., Różycka, M. & Migoń, P. (2016). Rzeźba granitowego skalnego miasta Starościńskich Skał w Rudawach Janowickich (Sudety Zachodnie). Landform Analysis, 31, 17–33 (in Polish with Eng. abs.: Morphology of the granite rock city of Starościńskie Skały in the Rudawy Janowickie/Western Sudetes/).
Migoń, P. (1993). Kopułowe wzgórza granitowe w Kotlinie Jeleniogórskiej. Czasopismo Geograficzne, 64(1), 3–23 (in Polish with Eng. abs.: Granite domical hills (bornhardts) in the Jelenia Góra Basin).
Migoń, P. (1996). Granite landscapes of the Sudetes Mountains—some problems of interpretation: a review. Proceedings of the Geologists’ Association, 107, 25–38.
Migoń, P. (2006). Granite landscapes of the world. Oxford: Oxford University Press.
Migoń, P. (2007). Granitoids in Poland. Archivum Mineralogiae Monograph 1. In A. Kozłowski & J. Wiszniewska (Eds.), Geomorphology of granite terrains in Poland (pp. 355–366). London: Komitet Nauk Mineralogicznych PAN & Wydział Geologii UW.
Migoń, P., Duszyński, F., & Goudie, A. (2017). Rock cities and ruiniform relief: forms—processes—terminology. Earth-Science Reviews, 171, 78–104.
Migoń, P. & Kasprzak, M. (2015). Analiza rzeźby stoliwa Szczelińca Wielkiego w Górach Stołowych na podstawie numerycznego modelu terenu z danych LiDAR, Przegląd Geograficzny, 87(1), 27–52 (in Polish with Eng. abs.: LiDAR DEM-based analysis of geomorphology of the Szczeliniec Wielki mesa in Poland’s Stołowe Mountains).
Migoń, P., Kasprzak, M., & Traczyk, A. (2013). How high-resolution DEM based on airborne LiDAR helped to reinterpret landforms—examples from the Sudetes, SW Poland. Landform Analysis, 22, 89–101.
Miziński, B., & Niedzielski, T. (2017). Fully-automated estimation of snow depth in near real time with the use of unmanned aerial vehicles without utilizing ground control points. Cold Regions Science and Technology, 138, 63–72.
Phantom 3 Professional. User Manual V1.0 (2015). DJI. http://download.dji-innovations.com/downloads/phantom_3/en/Phantom_3_Professional_User_Manual_v1.0_en.pdf.
Ryan, J. C., Hubbard, A. L., Box, J. E., Todd, J., Christoffersen, P., Carr, J. R., et al. (2015). UAV photogrammetry and structure from motion to assess calving dynamics at Store Glacier, a large outlet draining the Greenland ice sheet. Cryosphere, 9, 1–11.
Sobczyk, A., Danišík, M., Aleksandrowski, P., & Anczkiewicz, A. (2015). Post-Variscan cooling history of the central Western Sudetes (NE Bohemian Massif, Poland) constrained by apatite fission-track and zircon (U-Th)/He thermochronology. Tectonophysics, 649, 47–57.
Szałamacha, J. (1969). Objaśnienia do Szczegółowej mapy geologicznej Sudetów 1:25 000. Arkusz Janowice Wielkie M 33—44 Bd. Wydawnictwo Geologiczne, Warszawa. (in Polish: Explanations to Detailed geological map of Sudetes 1:25 000, sheet Janowice Wielkie M33–44Bd).
Tonkin, T. N., & Midgley, N. G. (2016). Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sensing, 8(9), 786.
Twidale, C. R., & Vidal Romani, J. R. (2005). Landforms and geology of the granite terrains. Leiden: Balkema.
Vollgger, S. A., & Cruden, A. R. (2016). Mapping folds and fractures in basement and cover rocks using UAV photogrammetry, Cape Liptrap and Cape Paterson, Victoria, Australia. Journal of Structural Geology, 85, 168–187.
Westoby, M. J., Brasington, J., Glasser, N. F., Hambrey, M. J., & Reynolds, J. M. (2012). ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology, 179, 300–314.
Wężyk, P. (ed.) (2014). Podręcznik dla uczestników szkoleń z wykorzystania produktów LiDAR. Informatyczny System Osłony Kraju przed nadzwyczajnymi zagrożeniami. Główny Urząd Geodezji i Kartografii, Warszawa, 328 p. (in Polish: Manual for training participants on the use of LiDAR products).
Acknowledgments
This paper is a contribution to the National Science Centre Project: ‘The geomorphic significance of tors of the West Sudetes’, no. UMO-2016/21/N/ST10/03256 (for Aleksandra Michniewicz). The LiDAR data used for this study have been purchased and used with academic license DIO.DFT.DSI.7211.1619.2015_PL_N, according to the Polish law regulations in the administration of Główny Urząd Geodezji i Kartografii (Head Office of Land Surveying and Cartography). The authors thank Piotr Migoń for helping us to improve the text.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Kasprzak, M., Jancewicz, K. & Michniewicz, A. UAV and SfM in Detailed Geomorphological Mapping of Granite Tors: An Example of Starościńskie Skały (Sudetes, SW Poland). Pure Appl. Geophys. 175, 3193–3207 (2018). https://doi.org/10.1007/s00024-017-1730-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00024-017-1730-8