
Abstract
The equations governing the motion of a three-dimensional liquid drop moving freely in an unbounded liquid reservoir under the influence of a gravitational force are investigated. Provided the (constant) densities in the two liquids are sufficiently close, existence of a steady-state solution is shown. The proof is based on a suitable linearization of the equations. A setting of function spaces is introduced in which the corresponding linear operator acts as a homeomorphism.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Consider a drop of liquid with density \(\rho _1\) submerged into an unbounded reservoir of liquid with density \(\rho _2\). Assume the liquids are immiscible. We investigate the motion of the drop under the influence of a constant gravitational force and surface tension on the interface. Specifically, we shall show existence of a steady-state solution to the governing equations of motion, provided the difference \({|\rho _1-\rho _2 |}\) of the densities is sufficiently small.
The dynamics of a falling (or rising) drop in a quiescent fluid has attracted a lot of attention in the field of fluid mechanics. Such flows have been studied extensively both experimentally and numerically with truly fascinating outcomes (see [3] for a comprehensive overview and further references), but it remains an intriguing task to analytically validate the observations. The observed dynamics can be characterized as a series of bifurcations with respect to the Reynolds number as parameter. Broadly speaking, steady-state solutions are observed for small Reynolds numbers, with bifurcations into oscillating motions as the Reynolds number increases. Bifurcations into more complex solutions can be observed as the Reynolds number increases even further.
In the following we investigate steady-state solutions for small Reynolds number, which corresponds to a small density difference \({|\rho _1-\rho _2 |}\). One of our aims is to develop a framework of function spaces that can be used not only to study steady states, but also as a foundation for further investigations into the dynamics described above. In particular, the framework should facilitate a stability analysis of the steady states, and an investigation of the Hopf-type bifurcations (into oscillating motions) observed in experiments. For this purpose, it should satisfy certain properties. First and foremost, it should be possible to identify function spaces within the framework such that the differential operator of the linearized equations of motion acts as a homeomorphism. Second, the framework should have a natural extension to a suitable time-periodic framework (recall that a steady-state solution is trivially also time-periodic). Third, the framework should adequately facilitate a spectral analysis of the operators obtained by linearizing the equations of motion around a steady state. To meet these criteria, we propose a framework of Sobolev spaces. Although a setting of Sobolev spaces seems natural, and the most convenient to work with, it is by no means trivial to identify one that conforms to the problem of a freely falling (or rising) drop. Indeed, one of the novelties of this article is the introduction of such a Sobolev-space setting that meets at least the first and most important criteria, and possibly also the other two, mentioned above, and in which existence of steady-state solutions can be shown effortlessly for small data. The investigation of steady-state solutions is not new, though. It was initiated by Bemelmans [5] and advanced by Solonnikov [14, 15]. However, the analysis carried out by Bemelmans and Solonnikov does not lead to a framework of Sobolev spaces. Indeed, for reasons that will be explained in detail below, the approaches of both Bemelmans and Solonnikov cannot be adapted to a Sobolev-space setting with the desired properties.
We shall consider the most commonly used model for two-phase flows with surface tension on the interface. It is assumed both fluids are Navier–Stokes liquids, which are incompressible, viscous, and Newtonian. It is further assumed that the fluids are immiscible with surface tension on their interface, which acts in normal direction proportional to the mean curvature. Moreover, we consider a system in which the drop is a ball \(\textrm{B}_{R_0}\) of radius \(R_0\) when no external forces act on the system, that is, in its stress free configuration. If we choose a coordinate system attached to the falling drop, these assumptions lead to the following equations of motion for a steady state (see Sect. 2 for details on the derivation):
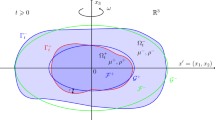
Here \({\Gamma _\eta }\) denotes the interface between the two liquids, which we assume to be a closed manifold parameterized by a “height” function \(\eta :\partial \textrm{B}_{R_0}\rightarrow {\mathbb {R}}\) describing the displacement of the drop’s boundary points in normal direction. The domain \(\Omega ^{(1)}_\eta \subset {\mathbb {R}}^3\) bounded by \({\Gamma _\eta }\) describes the domain occupied by the drop, and the exterior domain \(\Omega ^{(2)}_\eta :={\mathbb {R}}^3{\setminus }{\overline{\Omega }^{(1)}_\eta }\) the region of the liquid reservoir. The drop velocity \(-\lambda e_3\), \(\lambda \in {\mathbb {R}}\), is assumed to be directed along the axis of the (constant) gravitational force \(ge_3\). The first two equations in (1.1) are the Navier–Stokes equations written in a moving frame of reference, where \(u:{\mathbb {R}}^3\setminus {\Gamma _\eta }\rightarrow {\mathbb {R}}^3\) denotes the Eulerian velocity field of the liquids, \({\mathfrak {p}}:{\mathbb {R}}^3\setminus {\Gamma _\eta }\rightarrow {\mathbb {R}}\) the scalar pressure field, and \(\mathrm T(u,{\mathfrak {p}})\) the corresponding Cauchy stress tensor. The density function \(\rho :{\mathbb {R}}^3\setminus {\Gamma _\eta }\rightarrow {\mathbb {R}}\) is constant in both components of \({\mathbb {R}}^3\setminus {\Gamma _\eta }\). The third equation states that the surface tension in normal direction on the interface \({\Gamma _\eta }\) is proportional to the mean curvature \(\textrm{H}\), with \(\sigma >0\) a constant. The notation \(\llbracket \cdot \rrbracket \) is used to denote the jump of a quantity across \({\Gamma _\eta }\). Immiscibility of the two liquids under a no-slip assumption at the interface is expressed via the fourth and fifth equation. Observe that the normal velocity on the interface then coincides with that of the moving frame, which moves with the same velocity \(- \lambda e_3\) as the falling drop. The equations are augmented with a volume condition for the drop and the requirement that the liquid in the reservoir is at rest at spatial infinity in the sixth and seventh equation, respectively.
A key part of our investigation is directed towards finding an appropriate linearization of (1.1) with respect to the unknowns \(u\), \({\mathfrak {p}}\), \(\lambda \) and \(\eta \). The canonical linearization, i.e., around the trivial state (0, 0, 0, 0), leads to the Navier–Stokes equations (1.1)\(_{1-2}\) being replaced with the Stokes system
An analysis based on this linearization would have to be carried out in a setting of function spaces conforming to the properties of the Stokes problem. The Stokes setting of function spaces, however, is not suitable for an investigation of the exterior domain Navier–Stokes equations in a moving frame. Since the falling drop, and thus the frame of reference, moves with a nonzero velocity \(-\lambda e_3\), the appropriate linearization of the Navier–Stokes equations (1.1)\(_{1-2}\) is an Oseen system. At least in a setting of Sobolev spaces, the steady-state exterior-domain Navier–Stokes equations in a moving frame can only be solved in a framework of spaces conforming to the Oseen linearization. To resolve this issue, we propose to rewrite the system (1.1) as a perturbation around a state \((u_0,{\mathfrak {p}}_0,\lambda _0,\eta _0)\) with \(\lambda _0\ne 0\). A subsequent linearization of (1.1) then yields the Oseen problem
The main challenge, and indeed novelty of this article, is the introduction of a suitable state \((u_0,{\mathfrak {p}}_0,\lambda _0,\eta _0)\) that renders the problem well posed in a framework of classical Sobolev spaces. To this end, we employ the auxiliary fields introduced by Happel and Brenner [11]. A similar utilization of these auxiliary fields to linearize a free boundary Navier–Stokes problem set in an exterior domain was first carried out by Bemelmans, Galdi and Kyed [6].
The starting point of our investigation were the articles [14, 15] by Solonnikov, which contain a number of truly outstanding ideas on how to analyze (1.1). However, Solonnikov overlooks the necessity of an Oseen linearization as described above. Instead, he employs a Stokes linearization and consequently a setting of function spaces in which the nonlinear term \(\lambda \partial _3u\) cannot be correctly treated on the right-hand side. Our approach resolves this issue.
We derive the steady-state equations of motion for the falling drop and state the main theorem in the following Sect. 2. In Sect. 3 we collect the basic notation. The aforementioned framework of Sobolev spaces is then introduced in Sect. 4. Fundamental \(\textrm{L}^{r}\) estimates are established in Sect. 5, and a reformulation of (1.1) in a fixed reference configuration in Sect. 6. The linearization around a non-trivial state is carried out in Sect. 7. In Sect. 8 we show in Theorem 8.1 that the operator corresponding to this linearization is a homeomorphism in our framework of Sobolev spaces, which finally enables us to establish a proof of the main theorem, namely the existence of a steady-state solution for \({|\rho _1-\rho _2 |}\) sufficiently small.
2 Equations of Motion and Statement of the Main Theorem
We derive the system of equations governing the motion of a freely falling drop in a liquid under the influence of a constant gravitational force. We shall express these equations in a frame of reference with origin in the barycenter of the drop. More specifically, we denote by \(\xi (t)\) the barycenter of the falling drop with respect to an inertial frame, whose coordinates we denote by y, and express the equations of motion in barycentric coordinates \(x(t,y):=y-\xi (t)\). In these coordinates, the domain \({\Omega ^{(1)}_t}\subset {\mathbb {R}}^3\) occupied by the drop at time t satisfies
We let \({\Omega ^{(2)}_t}:={\mathbb {R}}^3{\setminus }{\overline{\Omega }^{(1)}_t}\) denote the domain of the surrounding liquid reservoir, and put \(\Omega _t:={\Omega ^{(1)}_t}\cup {\Omega ^{(2)}_t}\). The surface \({\Gamma _t}:=\partial {\Omega ^{(1)}_t}\) describes the interface between the two liquids. Moreover, we let \(\mu _1,\mu _2\) and \(\rho _1,\rho _2\) denote the constant viscosities and densities of the drop and the liquid reservoir, respectively. The functions
then describe the viscosity and density of the liquid occupying the point x at a given time t. Expressed in a frame of reference attached to the barycenter \(\xi \), the conservation of momentum and mass of both liquids is described by the Navier–Stokes system
where \(v\) denotes the Eulerian velocity field in the liquids, \(p\) the pressure,
the Cauchy stress tensor, and \(b\in {\mathbb {R}}^3\) a constant gravitational acceleration. One can decompose the velocity field and pressure term into
describing the liquid flow in the drop, and another part
describing the flow in the reservoir. We employ the notation
to denote the jump in a quantity on the interface between the two liquids. Concerning the physical nature of the interface, we make the basic assumption that slippage between the two liquids cannot occur, i.e., a no-slip boundary condition, and that liquid cannot be absorbed in the interface. Consequently, there is no jump in the velocity field neither in tangential nor in normal direction:
Since the liquids are immiscible, the normal component of the liquid velocity at the interface coincides with the velocity of the interface itself. If \(\Phi _\Gamma \) denotes a Lagrangian description of the interface in barycentric coordinates, the immiscibility condition therefore takes the form
In a classical two-phase flow model, surface tension on the interface, i.e., the difference in normal stresses of the two liquids, is proportional to the mean curvature in normal direction and in balance in tangential direction:
Since we consider the motion of a drop in a quiescent liquid, the velocity in the reservoir vanishes at spatial infinity
Due to the incompressibility of the liquid drop, its volume is constant. Since we consider a drop that takes the shape of the ball \(\textrm{B}_{R_0}\) in its stress free configuration, this volume is prescribed by
In conclusion, the system obtained by combining (2.1)–(2.8) governs the motion of a liquid drop falling freely in a liquid reservoir under the influence of a constant gravitational force.
In this article we will establish existence of a steady-state solution, that is, a time-independent solution to (2.1)–(2.8). Such a solution is of course only steady with respect to the chosen frame of reference; in our case the frame attached to the barycenter. Other types of steady states can be investigated by analyzing time-independent solutions in other frames. For example, it is conceivable that falling drops can perform steady rotating motions, which should be investigated by considering the equations of motion in a rotating frame of reference.
The unknowns in (2.1)–(2.8) are the functions \(v,p,{\dot{\xi }},\Phi _\Gamma \). The mean curvature \(\textrm{H}\) can be computed from \(\Phi _\Gamma \). The viscosities \(\mu _1,\mu _2>0\), surface tension \(\sigma >0\) and the prescribed volume \(\frac{4\pi }{3}R_0^3\) of the drop are constants, which may be chosen arbitrarily. Also the gravitational force \(b\in {\mathbb {R}}^3\) is an arbitrary constant, but upon a re-orientation of the coordinates we may assume without loss of generality that it is directed along the negative \(e_3\) axis, i.e., \(b=-ge_3\) with \(g>0\). The constant densities \(\rho _1,\rho _2>0\) shall be restricted to pairs whose difference \({|\rho _1-\rho _2 |}\) is sufficiently small. In this sense, we treat \(\rho _1-\rho _2\) as the data of the system. Since the geometry \(\big ({\Omega ^{(1)}_t},{\Omega ^{(2)}_t},{\Gamma _t}\big )\) of the problem is determined by the unknown description \(\Phi _\Gamma \) of the interface, (2.1)–(2.8) is a free boundary problem.
As mentioned above, we will establish existence of a steady-state, that is, time-independent, solution \((v,p,{\dot{\xi }},\Phi _\Gamma )\) to (2.1)–(2.8). In this case the velocity \({\dot{\xi }}\) is a constant vector. We focus on solutions with \({\dot{\xi }}\) directed along the axis of gravity, i.e., \({\dot{\xi }}=-\lambda e_3\). The steady-state equations of motion then read
where the interface \({\Gamma }\) is an unknown computed from the parameterization \(\Phi _{\Gamma }\). The unknowns in (2.9) are \(v,p,\lambda ,\Phi _{\Gamma }\).
At the outset, it is clear that (2.9) can have multiple solutions. This is best illustrated by considering \(\rho _1=\rho _2\), in which case the trivial solution with \(v=0\), \(\lambda =0\) and constant pressures \(p^{(1)}\), \(p^{(2)}\) is a steady-state solution if \(\sigma \textrm{H}\) equals the constant hydrostatic pressure difference \(p^{(1)}-p^{(2)}\) between the drop and the reservoir. Since a constant mean curvature \(\textrm{H}\) is realized whenever \(\Omega ^{(1)}\) is a multiple of disjoint balls, we obtain for each \(\Phi _{\Gamma }\) describing one or more spheres a trivial solution by adjusting the hydrostatic pressure difference accordingly (depending on the fixed volume \({|\Omega ^{(1)} |}\)). In the case (2.9) above, the fixed volume of \({|\Omega ^{(1)} |}\) coincides with the volume of the ball \(\textrm{B}_{R_0}\). With constant pressures satisfying \(p^{(1)}-p^{(2)}=\frac{2}{R_0}\), the ball \(\textrm{B}_{R_0}\) therefore becomes an admissible steady-state drop configuration when \(\rho _1=\rho _2\). We shall single out this configuration for further investigation in the sense that we investigate non-trivial steady-states with a configuration close to the ball \(\textrm{B}_{R_0}\) for \(\rho _1\ne \rho _2\) with \({|\rho _1-\rho _2 |}\) sufficiently small.
From a physical perspective, a smallness condition is only meaningful when expressed in a non-dimensional form. In order to obtain a dimensionless formulation of (2.9), we choose \(R_0\) as characteristic length scale, \(V_0:=\sqrt{gR_0}\) as the characteristic velocity, \(\rho _1+\rho _2\) as characteristic density, \((\rho _1+\rho _2)R_0 V_0\) as the characteristic viscosity, and \((\rho _1+\rho _2)R_0 V_0^2\) as the characteristic surface tension. Investigating the resulting non-dimensional equations of motion, we will establish existence of a non-trivial steady-state solution with drop configuration close to the unit ball \(B_{1}\). For this purpose, it is convenient to introduce (in the non-dimensionalized coordinates) the normalized pressures
We then obtain the following system of non-dimensional equations:
Observe that the mean curvature now appears in the form \((\textrm{H}+2)\) that vanishes if \(\Gamma \) is the unit sphere, which means that \((v,{\mathfrak {p}},\lambda )=(0,0,0)\) is a trivial solution when \(\rho _1-\rho _2=0\).
We shall employ a parameterization of \({\Gamma }\) over the unit sphere \({\mathbb {S}}^2\subset {\mathbb {R}}^3\) and subsequently linearize (2.10). The linearization of the operator \(\sigma (\textrm{H}+2)\), however, has a non-trivial kernel. To circumvent an introduction of corresponding compatibility conditions, we employ an idea from [15] and replace the two equations
in (2.10) with the equations
The resulting system then reads
The systems (2.10) and (2.13) are equivalent. Clearly, (2.10) implies (2.13). To verify the reverse implication, observe that (2.13)\(_{5-7}\) imply
The matrix \(\int _{{\Gamma }} \textrm{n}\otimes \textrm{n}\,{\mathrm d}S\) is symmetric positive definite and thus invertible. Consequently, the equation above implies \(\int _{\Omega ^{(1)}} x\,{\mathrm d}x=0\). We conclude that (2.13) implies (2.10).
Since we investigate existence of non-trivial steady-states in a drop configuration close to the ball \(\textrm{B}_{1}\) (in non-dimensionalized coordinates) under the restriction that the difference in densities of the two liquids is sufficiently small, it is convenient to introduce
as smallness parameter. Moreover, it is convenient to parameterize the interface \({\Gamma }\) via a height function \(\eta : {\mathbb {S}}^2 \rightarrow {\mathbb {R}}\) that describes the drop’s displacement in normal direction with respect to its unit sphere \({\mathbb {S}}^2\subset {\mathbb {R}}^3\) stress-free configuration. The geometry then becomes a function of \(\eta \):
The system of steady-state equations of motion finally takes the form
with respect to unknowns \((v,{\mathfrak {p}},\lambda ,\eta )\).
As the main result in the article we prove existence of a solution to the steady-state equations of motion (2.14) under a smallness condition on the density difference \(\widetilde{\rho }\).
Theorem 2.1
(Main Theorem). There is an \(\varepsilon >0\) such that for \(0<{|\widetilde{\rho } |}\le \varepsilon \) there is a solution
to (2.14). The solution is smooth up to the interface, that is,
Moreover, it possesses the integrability properties
and admits the representation
for all \(\varepsilon >0\), where \(\varGamma _{\text {Oseen}}^\lambda \) denotes the Oseen fundamental solution.Footnote 1 The solution is symmetric with respect to rotations leaving \(e_3\) invariant:
and the velocity \(\lambda \) of the drop’s barycenter is non-vanishing.
By far the most challenging part of proving Theorem 2.1 is to establish the existence of a solution. As mentioned in the introduction, via a perturbation around a non-trivial state we are able to solve the system in a setting of Sobolev spaces adopted from the 3D exterior-domain Oseen linearization of the Navier–Stokes equations. Consequently, we are led to a solution with the integrability properties (2.16). The symmetry (2.18) follows from the observation that (2.14) is invariant with respect to rotations leaving \(e_3\) invariant. Higher-order regularity is obtained via a standard approach utilizing the ellipticity of (2.14), while the asymptotic profile (2.17) is a direct consequence of (2.16) and a celebrated result of Babenko [4] and Galdi [7]. Observe that the coefficient vector in the asymptotic expansion, which at the outset is given by
coincides with the net force \(\frac{4\pi }{3} \widetilde{\rho }e_3=\widetilde{\rho }{|{\Omega ^{(1)}_\eta } |}e_3\) acting on the liquid drop, that is, the difference of the gravitational force and the buoyancy force.
The solution obtained in Theorem 2.1 is locally unique. Specifically, a radius r can be quantified in terms of the density difference \(\widetilde{\rho }\) such that the solution is unique in a ball \(\textrm{B}_r\) in a suitable Banach space; see Theorem 8.4. The local uniqueness follows directly from Banach’s Fixed Point Theorem. Global uniqueness for small data is expected, but the energy type estimates required to show this goes beyond the scope of this article.
3 Notation
We use capital letters to denote global constants in the proofs and theorems, and small letters for local constants appearing in the proofs.
By \(\textrm{B}_R:=\textrm{B}_R(0)\) we denote a ball in \({{\mathbb {R}}^n}\) centered at 0 with radius R. Moreover, we let
for a domain \(\Omega \subset {{\mathbb {R}}^n}\). Additionally, we use \({\mathbb {S}}^2:=\partial \textrm{B}_1\) to denote the unit sphere. By
we denote the twofold half space, which is the union of the two domains
We use the notation \((x',x_3)\) for a vector \(x=(x_1,x_2,x_3)\in {\mathbb {R}}^3\).
Lebesgue spaces are denoted by \(\textrm{L}^{q}(\Omega )\) with associated norms \(\Vert \cdot \Vert _{q,\Omega }\). By \(\textrm{W}^{k,q}(\Omega )\) we denote the corresponding Sobolev space of order \(k\in {\mathbb {N}}_0\) with norm \(\Vert \cdot \Vert _{k,q,\Omega }\), and we introduce the subspaces
Moreover, \(\textrm{W}^{-k,q}(\Omega )\) and \(\textrm{W}^{-k,q}_0(\Omega )\) denote the dual spaces of \(\textrm{W}^{k,q'}(\Omega )\) and \(\textrm{W}^{k,q'}_0(\Omega )\), respectively, where \(q':=\frac{q}{q-1}\). We further introduce homogeneous Sobolev spaces \(\textrm{D}^{k,q}(\Omega )\) defined by
and the corresponding seminorm
In general, \(\textrm{D}^{k,p}(\Omega )\) is not a Banach space. However, \({|\,\cdot \, |}_{k,q,\Omega }\) defines a norm on \(\textrm{C}^{\infty }_0(\Omega )\), and the completion
is therefore a Banach space. By Sobolev’s Embedding Theorem, \(\textrm{D}^{k,q}_0(\Omega )\) can be identified with a subspace of \(\textrm{L}^{1}_{\textrm{loc}}(\Omega )\) if \(kq<3\). We denote its dual space by \(\textrm{D}^{-k,q'}_0(\Omega )\). For a sufficiently smooth manifold \(\Gamma \subset {\mathbb {R}}^3\) and \(s>0\), \(s\not \in {\mathbb {N}}\), we let \(\textrm{W}^{s,q}(\Gamma )\) denote the Sobolev–Slobodeckij space of order s with norm \(\Vert \cdot \Vert _{s,q,\Gamma }\).
4 Preliminaries
In this section we introduce a bespoke framework of Sobolev spaces for the investigation of (2.14). For this purpose we let \(\Omega \subset {\mathbb {R}}^3\) denote an open set of the same type as in Sect. 2, that is, we assume
For a function \(u:\Omega \rightarrow {\mathbb {R}}\) we use the abbreviations
The function \(\textrm{n}=\textrm{n}_\Gamma \) denotes the unit outer normal at \(\Gamma \). If \(u\) is sufficiently regular, we set
where the restrictions to \(\Gamma \) have to be understood in the trace sense. Furthermore, \(\delta (\Omega )\) denotes the diameter of \(\Omega ^{(1)}\).
When considering a function \(u:\Omega \rightarrow {\mathbb {R}}\), we often have to distinguish between its properties on the disjoint sub-domains \(\Omega ^{(1)}\) and \(\Omega ^{(2)}\). To this end, function spaces of the type
are introduced. Equipped with the norm
such a space X is isomorphic to the direct sum of the spaces \(X^{(1)}\) and \(X^{(2)}\). Clearly, X is a Banach space if \(X^{(1)}\) and \(X^{(2)}\) are so.
Let \(q\in \big (1,\frac{3}{2}\big )\) and \(r\in (3,\infty )\). For \({\lambda _0}\in {\mathbb {R}}, {\lambda _0}\ne 0\) the space
equipped with the norm
is the canonical solution space for solutions to the exterior domain Oseen problem
for forcing terms f in \(\textrm{L}^{q}\big (\Omega ^{(2)}\big )\cap \textrm{L}^{r}\big (\Omega ^{(2)}\big )\); see for example [8, Chapter VII.7]. Let
and
The bespoke framework of Sobolev spaces we shall employ in our investigation of (2.14) is then given by
In Theorem 8.1 we show that the operator corresponding to the appropriate linearization of (2.14) maps \({{\textbf{X}}^{q,r}_{\lambda _0}}\) homeomorphically onto \({\textbf{Y}}^{q,r}\).
The following embedding is valid:
Proposition 4.1
Let \(u\in {{\textbf{X}}^{q,r}_{1,{\lambda _0}}}\) with \(q\in \big (1,\frac{3}{2}\big )\), \(r\in (3,\infty )\), and consider \(s\in \big [\frac{2q}{2-q},\infty \big ]\) and \(t\in \big [\frac{4q}{4-q},\infty \big ]\). Then \(u\in \textrm{L}^{s}(\Omega )\cap \textrm{D}^{1,t}(\Omega )\). If \(s\ge \frac{3q}{3-2q}\) and \(t\ge \frac{3q}{3-q}\), then
If \(\frac{2q}{2-q}\le s <\frac{3q}{3-2q}\), \(\frac{4q}{4-q}\le t <\frac{3q}{3-q}\), \(\theta _s:=2+\frac{3}{s}-\frac{3}{q}\) and \(\theta _t:=1+\frac{3}{t}-\frac{3}{q}\), then
Here \(C =C(q,r,s,t,\Omega )>0.\)
Proof
The above estimates for the part \(u^{(1)}\) of \(u\) defined on a bounded domain follows directly from Sobolev embedding theorems. Concerning the part \(u^{(2)}\) defined on an exterior domain, it follows from [8, Lemma II.6.1] and the Sobolev inequality that
Interpolation with the Sobolev-type inequality
yields estimate (4.3) of \(\nabla u\). Estimate (4.4) of \(\nabla u\) follows by interpolating (4.5) with the trivial estimate \({|{\lambda _0} |}^\frac{1}{4}\Vert \nabla u^{(2)}\Vert _{\frac{4q}{4-q}} \le \Vert u\Vert _{{{\textbf{X}}^{q,r}_{1,{\lambda _0}}}}\). The estimates (4.3)–(4.4) of \(u\) can be verified in a similar manner. \(\square \)
5 Auxiliary Linear Problem
Let \(\Omega \) be a domain of the same type as in Sect. 4, i.e., satisfying (4.1). We further assume that the boundary \(\Gamma \) is at least Lipschitz. The linear system
is an integral part of the linearization of (2.14). It is a two-phase strongly coupled Oseen \(({\lambda _0}\ne 0)\) or Stokes \(({\lambda _0}= 0)\) system. Since the coupling is strong, the question of existence and uniqueness of solutions as well as a priori estimates hereof cannot be investigated by means of a simple decomposition into two classical Oseen/Stokes problems (one for each phase). In the following, we carry out an analysis of (5.1) in the framework of the Sobolev spaces introduced in the previous section. Existence and uniqueness of solutions is first shown in a setting of weak solutions. Strong a priori estimates of Agmon–Douglis–Nirenberg type are subsequently established, first in the half space, and then in the general case via a localization technique. The main result of the section is contained in Theorems 5.9 and 5.10.
5.1 Weak Solutions
We introduce a weak formulation of (5.1) in the setting of the function spaces:
In the following, we establish existence and uniqueness as well as higher-order regularity of weak solutions to (5.1) in this framework. We start with the definition of a weak solution:
Definition 5.1
Let \(f\in {\mathscr {H}}'\), \(g\in \textrm{L}^{2}({\mathbb {R}}^3)\), \({h_1}\in \textrm{W}^{\frac{1}{2},2}(\Gamma )\) and \({h_2}\in \textrm{W}^{-\frac{1}{2},2}(\Gamma )^3\). A vector field \(u\in \textrm{D}^{1,2}_0({\mathbb {R}}^3)^3\) is called a weak solution to (5.1) if
as well as \({{\,\textrm{div}\,}}u=g\) in \(\Omega \) and \(u\cdot \textrm{n}={h_1}\) on \(\Gamma \).
Existence of a weak solution \(u\) can be shown by standard techniques; we sketch a proof below.
Theorem 5.2
Assume that the boundary \(\Gamma \) is Lipschitz. For every \(f\in {\mathscr {H}}'\), \(g\in \textrm{L}^{2}({\mathbb {R}}^3)\), \({h_1}\in \textrm{W}^{\frac{1}{2},2}(\Gamma )\) and \({h_2}\in \textrm{W}^{-\frac{1}{2},2}(\Gamma )^3\) satisfying
there is a weak solution \(u\in \textrm{D}^{1,2}_0({\mathbb {R}}^3)^3\) to (5.1) satisfying
where \( C= C(\Gamma ,{\lambda _0})\).
Proof
We sketch a proof of existence following [8, Proof of Theorem VII.2.1] based on a Galerkin approximation. To this end, a Schauder basis \(\{\varphi _k\}_{k=1}^\infty \subset {\mathscr {C}}\) for the function space \(\{\varphi \in \textrm{W}^{1,2}({\mathbb {R}}^3)\ \mid \ \varphi \cdot \textrm{n}=0\ \text {on }\Gamma ,\ {{\,\textrm{div}\,}}\varphi =0\}\) satisfying \(\int _{\Omega } 2\mu \,\mathrm S(\varphi _k):\mathrm S(\varphi _l)\,{\mathrm d}x= \delta _{k,l}\) is constructed. This function space is clearly separable, whence such a basis can be constructed via a Gram–Schmidt procedure. We consider first the case \((g,{h_1})=(0,0)\). Existence of an approximate solution of order \(m\in {\mathbb {N}}\), that is, a vector field \(u_m:=\sum _{l=1}^m \xi _l\varphi _l\) satisfying the equation in (5.2) for all test functions in \({{\,\textrm{span}\,}}\{\varphi _1,\ldots ,\varphi _m\}\), then follows directly from the fact that the matrix \(A\in {\mathbb {R}}^{m\times m}\), \(A_{kl}:=\int _{{\mathbb {R}}^3}\partial _3\varphi _l\cdot \varphi _k\), is skew symmetric and \(I+{\lambda _0}A\) therefore invertible. Specifically, the coefficient vector \(\xi :=(I+{\lambda _0}A)^{-1}F\) with \(F_k:=\langle f, \varphi _k \rangle +\langle {h_2}, \varphi _k \rangle \) induces an approximate solution \(u_m\). Employing \(u_m\) itself as a test function in the weak formulation, one obtains a uniform bound on \(\Vert \mathrm S(u_m)\Vert _2\), which, since \(u_m\) is solenoidal, also implies a uniform bound as in (5.4) on \({|u_m |}_{1,2}\). A weak solution to (5.1) is now obtained as the limit \(u:=\lim _{m\rightarrow \infty }u_m\) in \({\mathscr {H}}\). The general case of non-vanishing g and \({h_1}\) follows by a lifting argument. Employing a right inverse of the trace operator \(\textrm{W}^{1,2}({\mathbb {R}}^3)\rightarrow \textrm{W}^{\frac{1}{2},2}(\Gamma )\), we find \(u_1\in \textrm{W}^{1,2}({\mathbb {R}}^3)\) with \(u_1={h_1}\) on \(\Gamma \) satisfying \(\Vert u_1\Vert _{1,2}\le c\Vert {h_1}\Vert _{\frac{1}{2},2}\). The compatibility condition (5.3) ensures that \(\int _{\Omega ^{(1)}}g-{{\,\textrm{div}\,}}u_1\,{\mathrm d}x=0\) so that we can find \(u_2\in \textrm{D}^{1,2}_0({\mathbb {R}}^3)\) with \({{\,\textrm{div}\,}}u_2 = g - {{\,\textrm{div}\,}}u_1\) and satisfying \(u_2=0\) on \(\Gamma \) as well as (5.4); see for example [8, Theorem III.3.1 and III.3.6]. The ansatz \(u=v+u_1+u_2\) now reduces the problem to the case above with respect to the unknown \(v\). We thus conclude existence of a weak solution. \(\square \)
A pressure \({\mathfrak {p}}\) can be associated to a weak solution \(u\) such that \((u,{\mathfrak {p}})\) becomes a solution to (5.1) in the sense of distributions:
Theorem 5.3
Assume \(f\in H'\). To every weak solution \(u\in \textrm{D}^{1,2}_0({\mathbb {R}}^3)\) to (5.1) there is a unique \({\mathfrak {p}}\in \textrm{L}^{2}_0({\mathbb {R}}^3)\) such that
and
with \(C=C(\Gamma )>0\).
Proof
The proof is modification of [8, Lemma VII.1.1]. For arbitrary \(M\in {\mathbb {N}}\) with \(M>\delta (\Omega )\) we let \(H_M:=\{\varphi \in H\ \mid \ {{\,\textrm{supp}\,}}\varphi \subset B_M\}\) and consider the functional
which is continuous on \(H_M\) by Sobolev embedding. We further introduce the space
and the operator \({{\,\textrm{div}\,}}:H_M\rightarrow \textrm{L}^{2}_{0,M}\). The operator is surjective, which is seen by solving for arbitrary \(p\in \textrm{L}^{2}_{0,M}\) the two equations
according to [8, Theorem III.3.1]. It follows that the operator and hence also its adjoint \({{\,\textrm{div}\,}}^{*}\) are both closed. Since \(u\) is a weak solution, \(F_M\) vanishes on the kernel of \({{\,\textrm{div}\,}}\) and consequently belongs to the image of \({{\,\textrm{div}\,}}^{*}\). We thus obtain a function \({\mathfrak {p}}_M\in \textrm{L}^{2}_{0,M}\) such that \(\langle F_M, \varphi \rangle :=\int _{B_R}{\mathfrak {p}}_M {{\,\textrm{div}\,}}\varphi \,{\mathrm d}x\). After possibly adding a constant to \({\mathfrak {p}}_{M+1}^{(2)}\), we may assume \({\mathfrak {p}}_{M+1}={\mathfrak {p}}_M\) in \(B_M\). The sequence \(\{{\mathfrak {p}}_M\}_{M=1}^\infty \) then induces a pressure \({\mathfrak {p}}\in \textrm{L}^{2}_{\textrm{loc}}({\mathbb {R}}^3)\) satisfying (5.5) and \(\int _{\Omega ^{(1)}} {\mathfrak {p}}\,{\mathrm d}x=0\). It remains to establish \(\textrm{L}^{2}({\mathbb {R}}^3)\) integrability of \({\mathfrak {p}}\). If \({\lambda _0}=0\), the functional \(F_M\) remains continuous if \(H_M\) is replaced with \(H\). In this case the argument above directly yields a pressure \({\mathfrak {p}}\in \textrm{L}^{2}_0({\mathbb {R}})^3\) satisfying (5.5). Subsequently choosing a function \(\varphi \in H\) with \({{\,\textrm{div}\,}}\varphi ={\mathfrak {p}}\) in \({\mathbb {R}}^3\) and \({|\varphi |}_{1,2}\le c\Vert {\mathfrak {p}}\Vert _2\), which can be done via [8, Theorem III.3.1 and Theorem III.3.6], one obtains (5.6) by inserting \(\varphi \) into (5.5). If \({\lambda _0}\ne 0\), it suffices to observe that \((u,{\mathfrak {p}})\) is a weak solution to an Oseen problem in the exterior domain \(\Omega ^{(2)}\), whence [8, Theorem VII.7.2] yields \({\mathfrak {p}}\in \textrm{L}^{2}_0({\mathbb {R}})^3\) satisfying (5.5)–(5.6). \(\square \)
Provided \(u\) and \({\mathfrak {p}}\) are sufficiently regular, integration by parts in (5.5) reveals that \((u,{\mathfrak {p}})\) is a classical solution to (5.1). Higher-order regularity of \((u,{\mathfrak {p}})\) can be obtained via a classical approach under appropriate regularity assumptions on the data:
Theorem 5.4
Let \(k\in {\mathbb {N}}_0\) and assume that \(\Gamma \) is a \(\textrm{C}^{k+3}\)-smooth closed surface. If
then a weak solution \(u\in \textrm{D}^{1,2}_0({\mathbb {R}}^3)^3\) to (5.1) with associated pressure \({\mathfrak {p}}\in \textrm{L}^{2}_{\textrm{loc}}({\mathbb {R}}^3)\) satisfying (5.5) also satisfies
Proof
The proof is a standard application of a well-known technique based on difference quotients. In fact, with only minimal modification it is similar to a proof of higher-order regularity for solutions to the Stokes system with prescribed normal velocity and tangential stress on the boundary; see [16, Proof of Theorem 2]. For the sake of completeness, we sketch the proof. We include only the case \({h_1}=0\) and \(k=0\). The general case \({h_1}\ne 0\) and \(k>0\) follows by a simple lifting technique and iteration procedure, respectively. Since higher-order regularity in \(\Omega \) away from the boundary \(\Gamma \) is well known for Stokes systems (see for example [8, Sect. IV.2]), we focus on regularity up to the boundary \(\Gamma \). To this end, consider an arbitrary \({\tilde{x}}\in \Gamma \) and choose a cube \(Q_r({\tilde{x}})\subset {\mathbb {R}}^3\), centered at \({\tilde{x}}\) with side length r, such that \(\Gamma \cap Q_r({\tilde{x}})\) can be parameterized by a \(\textrm{C}^{3}\) function \(\omega \). Without loss of generality, we may assume that \({\tilde{x}}=0\) and
where \(Q_r'(0)\subset {\mathbb {R}}^2\) is the two-dimensional cube centered around 0, and that \(\nabla \omega (0)=0\) as well as \(\Vert \nabla \omega \Vert _\infty \rightarrow 0\) as \(r\rightarrow 0\). Let \(\chi \in \textrm{C}^{\infty }_0({\mathbb {R}}^3)\) be a cut-off function with \(\chi =1\) on \(Q_{\frac{r}{2}}(0)\) and put
We introduce test functions
with
The transformed fields \((U,{\mathfrak {P}})\) satisfy the weak formulation
where \(F_0\) contains up to first-order terms of \(u\) and zeroth-order terms of \({\mathfrak {p}}\), and \(F_1\) contains first-order terms of \(U\) multiplied with components of \(\nabla \omega \). The magnitude of the latter terms can be made small by choosing r small. Difference quotients are denoted by \(D^{h}_{l}U(x):=\frac{1}{h}\big (U(x+he_l)-U(x)\big )\). Importantly, difference quotients \(D^{-h}_{l}D^{h}_{l}U\) in tangential direction \(l=1,2\) are admissible as test functions in \(\textrm{W}^{1,2}_{0,\Gamma _0}\big (Q_r(0)\big )\) and can therefore be inserted into (5.8), which yields an estimate of \(\Vert \mathrm S(D^{h}_{l}U)\Vert _2\) in terms of lower-order norms of \(u\) and \({\mathfrak {p}}\) as well as \(\Vert D^{h}_{l}{\mathfrak {P}}\Vert _2\). A similar bound on \(\Vert \nabla D^{h}_{l}U\Vert _2\) follows from Korn’s inequality. Choosing in (5.8) a test function \(D^{-h}_{l}\psi \in \textrm{W}^{1,2}_{0,\Gamma _0}\big (Q_r(0)\big )\) with \({{\,\textrm{div}\,}}\psi =D^{h}_{l}{{\mathfrak {P}}}\), a bound on \(\Vert D^{h}_{l}{\mathfrak {P}}\Vert _2\) in terms of lower-order norms of \(u\) and \({\mathfrak {p}}\) is obtained. Such a test function is constructed by setting \(\psi :=\psi ^+\) in \(Q^+:=\{x\in Q_r(0)\ \mid \ x_3>0\}\) and \(\psi :=\psi ^-\) in \(Q^-:=\{x\in Q_r(0)\ \mid \ x_3<0\}\) where
Existence of solutions to the two equations above and the estimates \(\Vert \psi ^\pm \Vert _{1,2}\le c\Vert D^{h}_{l}{\mathfrak {P}}\Vert _2 \) are secured by [8, Corollary III.5.1]. It follows that \(\Vert \nabla D^{h}_{l}U\Vert _2+\Vert D^{h}_{l}{\mathfrak {P}}\Vert _2\) is uniformly bounded in h, which implies \(\partial _l\nabla U,\partial _l{\mathfrak {P}}\in \textrm{L}^{2}(Q_r(0))\) for \(l=1,2\). Since \({{\,\textrm{div}\,}}U=G\) with G containing only zeroth-order terms of \(u\), \(\partial _3^2U\in \textrm{L}^{2}(Q_r(0))\) follows as a combination of \(\partial _3{{\,\textrm{div}\,}}U=\partial _3 G\) and the regularity of \(U\)’s tangential derivatives. Finally, the distributional derivative \(\partial _3{\mathfrak {P}}\) can now be isolated in (5.8) to deduce in each half of the cube \({\mathfrak {P}}\in \textrm{W}^{1,2}\big (Q^+\big )\) and \({\mathfrak {P}}\in \textrm{W}^{1,2}\big (Q^-\big )\). It follows that \((u,{\mathfrak {p}})\in \textrm{W}^{2,2}\big ({{\mathcal {O}}}^{(1)}({{\tilde{x}}})\big )\times \textrm{W}^{1,2}\big ({{\mathcal {O}}}^{(1)}({{\tilde{x}}})\big )\) as well as \((u,{\mathfrak {p}})\in \textrm{W}^{2,2}\big ({{\mathcal {O}}}^{(2)}({{\tilde{x}}})\big )\times \textrm{W}^{1,2}\big ({{\mathcal {O}}}^{(2)}({{\tilde{x}}})\big )\), where \({{\mathcal {O}}}({{\tilde{x}}})\) is a neighborhood of \({\tilde{x}}\) and \({{\mathcal {O}}}^{(1)}({{\tilde{x}}}):={{\mathcal {O}}}({{\tilde{x}}})\cap \Omega ^{(1)}\), \({{\mathcal {O}}}^{(2)}({{\tilde{x}}}):={{\mathcal {O}}}({{\tilde{x}}})\cap \Omega ^{(2)}\). Higher-order regularity of \((u,{\mathfrak {p}})\) up to the boundary \(\Gamma \) is thereby established. \(\square \)
Finally, uniqueness of a weak solution to (5.1) can be established. In fact, uniqueness can be obtained in a much larger class of distributional solutions with even less summability at spatial infinity than \(u\in \textrm{L}^{6}({{\mathbb {R}}^3})\) satisfied by a weak solution via Sobolev embedding. The theorem below is not optimal in this respect, but suffices for the purposes of this article.
Theorem 5.5
Let \(\Gamma \) be a \(\textrm{C}^{2}\)-smooth closed surface, and let \((u,{\mathfrak {p}})\in \textrm{W}^{1,2}_{\textrm{loc}}({{\mathbb {R}}^3})^3\times \textrm{L}^{2}_{\textrm{loc}}({{\mathbb {R}}^3})\) be a solution to (5.1) in the sense of (5.5) with \(u\in \textrm{L}^{q}({\mathbb {R}}^3)^3\) and \({\mathfrak {p}}\in \textrm{L}^{r}({{\mathbb {R}}^3})\) for some \(q,r\in (1,\infty )\). If \((f,g,{h_1},{h_2})=(0,0,0,0)\), then \(u=0\).
Proof
The integrability assumption \(u\in \textrm{L}^{q}({\mathbb {R}}^3)\) combined with the fact that \((u,{\mathfrak {p}})\) solves a classical Stokes \(({\lambda _0}=0)\) or Oseen \(({\lambda _0}\ne 0)\) problem with homogeneous right-hand side in the exterior domain \(\Omega ^{(2)}\) implies that \(u\) exhibits the same pointwise rate of decay as the three-dimensional Stokes fundamental solution \(({\lambda _0}=0)\) or the three-dimensional Oseen fundamental solution \(({\lambda _0}\ne 0)\); see [8, Theorem V.3.2 and Theorem VII.6.2] for example. This means that \(u(x)=O({|x |}^{-1})\) as \({|x |}\rightarrow \infty \). Moreover, we obtain \({\mathfrak {p}}\in O({|x |}^{-2})\). Let \(\chi \in \textrm{C}^{\infty }_0({\mathbb {R}})\) be a cut-off function with \(\chi =1\) for \({|x |}<1\) and \(\chi =0\) for \({|x |}>2\), and put \(\chi _R:=\chi \big (\frac{{|x |}}{R}\big )\). Then \(\chi _Ru\) is admissible as a test function in (5.5), which implies
Utilizing that \(u=O\big ({|x |}^{-1}\big )\), we use Hölder’s inequality to estimate
Furthermore, in the Oseen case (\({\lambda _0}\ne 0\)) we even have the better averaged decay estimate
see [8, Exercise VII.6.1]; which leads to
Since also
we deduce \(\Vert \mathrm S(u)\Vert _2=0\) and thus \(u=0\). \(\square \)
5.2 Twofold Half Space
The main challenge towards \(\textrm{L}^{r}\) estimates of solutions to (5.1), i.e., a priori estimates of Agmon–Douglis–Nirenberg type, is to obtain such estimates in the half-space case under disregard of the lower-order terms in the equations. The general case then follows via a localization argument. We therefore first consider the system
where \(\textrm{n}=-e_3\). We shall implicitly identify \(\partial {\dot{{\mathbb {R}}}}^3\) with \({{\mathbb {R}}^2}\). In Theorem 5.8 we establish the a priori \(\textrm{L}^{r}\) estimate (5.21) for solutions to (5.9).
In the celebrated work [2] of Agmon, Douglis and Nirenberg, a priori \(\textrm{L}^{r}\) estimates for strong solutions to elliptic systems with boundary values of a certain type were established. Since (5.9) can be decomposed into two Stokes systems, with a slip and a Dirichlet boundary condition, respectively, that both fall into the category covered by [2], it might seem at the outset as if \(\textrm{L}^{r}\) estimates such as (5.21) can be derived from [2]. However, since the two Stokes systems would be strongly coupled, there is no direct way to derive \(\textrm{L}^{r}\) estimates for the full system (5.9) from [2]. Instead, one can turn to existing \(\textrm{L}^{r}\) estimates for the resolvent problem corresponding to (5.9). For large resolvent parameters such estimates were established in [13, Theorem 3.1.4]. In the following, we only utilize \(\textrm{L}^{r}\) estimates for (5.9) in a localization argument in the proof of Theorem 5.9. In this application, the estimates in [13] would be sufficient, since in the context of a localization argument the resolvent term is irrelevant. Nevertheless, we choose to establish in Theorem 5.8 below the classical Agmon–Douglis–Nirenberg \(\textrm{L}^{r}\) estimate for (5.9), which is also interesting in its own right. We present a new type of proof based on Fourier multipliers and real interpolation that seems particularly well suited for coupled systems such as (5.9).
The proof of Theorem 5.8 is divided into Lemma 5.6 and Lemma 5.7. For technical reasons, it is convenient to decompose both the data and the solution to (5.9) into one part with lower frequency support and another part with higher frequency support in tangential directions \(e_1,e_2\). We shall repeatedly employ the Fourier transform \({\mathscr {F}}_{{\mathbb {R}}^2}\) with respect to these two directions. To this end, observe that \({\mathscr {F}}_{{\mathbb {R}}^2}\big [u(\cdot ,x_3)\big ](\xi ')\) is well-defined in the sense of distributions \({\mathscr {S}}^{\prime }({{\mathbb {R}}^3})\) when \(u\in \textrm{L}^{r}({{\mathbb {R}}^3})\) for some \(r\in (1,\infty )\), which will be the case whenever such an expression appears below.
Lemma 5.6
Let \(r\in (1,\infty )\) and \(b\in \textrm{W}^{2-1/r,r}({{\mathbb {R}}^2})^3\) with \({{\,\textrm{supp}\,}}{\mathscr {F}}_{{\mathbb {R}}^2}[b]\subset {\mathbb {R}}^2\setminus \textrm{B}_1(0)\). Then there is a solution \((u,{\mathfrak {p}})\in \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)^3\times \textrm{W}^{1,r}({\dot{{\mathbb {R}}}}^3)\) to
which satisfies
where \(C=C(r)\). Moreover, \({\mathscr {F}}_{{\mathbb {R}}^2}\big [u(\cdot ,x_3)\big ](\xi ')\) and \({\mathscr {F}}_{{\mathbb {R}}^2}\big [{\mathfrak {p}}(\cdot ,x_3)\big ](\xi ')\) are supported away from \((\xi ',x_3)\in B_{1/2}(0)\times {\mathbb {R}}\).
Proof
A solution to (5.10) can be constructed explicitly. To this end, consider first a sufficiently smooth right-hand side \(b\in {\mathscr {S}}({\mathbb {R}}^2)^3\) with \({{\,\textrm{supp}\,}}{\mathscr {F}}_{{\mathbb {R}}^2}[b]\subset {\mathbb {R}}^2\setminus \textrm{B}_{1/2}(0)\). We employ the notation \(\widehat{b}:={\mathscr {F}}_{{\mathbb {R}}^2}[b]\) and \(v:=(u_1,u_2)\), \(w:=u_3\) as well as \(b_v:=(b_1,b_2)\) and \(b_w:=b_3\). An application of the Fourier transform \({\mathscr {F}}_{{\mathbb {R}}^2}\) with respect to \(x'\in {\mathbb {R}}^2\) in (5.10) yields
Therefore \({\mathfrak {p}}\) satisfies \({|\xi ' |}^2\,\widehat{{\mathfrak {p}}}-\partial _3^2\,\widehat{{\mathfrak {p}}}=0\) and thus
We insert \({\mathfrak {p}}\) into (5.12)\(_{1}\) and (5.12)\(_{2}\) and solve the resulting differential equations. Taking into account the boundary conditions (5.12)\(_{4}\), we obtain
Inserting the above formula for \(\widehat{u}\) into (5.12)\(_{3}\), we find that
Consequently, a solution to (5.10) is given by
where
Although \(M_b\) has a singularity, \((u,{\mathfrak {p}})\) as defined above is a well-defined solution, smooth on \({\dot{{\mathbb {R}}}}^3\) even, due to the assumption that \(\widehat{b}(\xi ')\) has support away from 0. In order to provide an estimate for the solution, we let \(\kappa _{1/4}\in \textrm{C}^{\infty }_0({\mathbb {R}}^2)\) with \(\kappa _{1/4}=0\) on \(\textrm{B}_{1/4}(0)\) and \(\kappa _{1/4}=1\) on \({\mathbb {R}}^2\setminus \textrm{B}_{1/2}(0)\), and consider the truncation
of the solution operator. The singularity of \(M_\varphi \) makes it necessary to employ the truncation \(\kappa _{1/4}\) to ensure that \({\mathcal {K}}\) is well-defined. We shall use real interpolation to show that \({\mathcal {K}}\) extends to a bounded operator \({\mathcal {K}}:\textrm{W}^{2-1/r,r}({{\mathbb {R}}^2})\rightarrow \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)\). To this end, we observe for \(m\in {\mathbb {N}}_0\) and any \(x_3\in {\mathbb {R}}\) that the symbol \(\xi '\mapsto ({|\xi ' |}{|x_3 |})^me^{-{|\xi ' |}{|x_3 |}}\) is an \(\textrm{L}^{r}({{\mathbb {R}}^2})\)-multiplier. Specifically, one may verify that
whence it follows from the Marcinkiewicz Multiplier Theorem (see for example [10, Corollary 6.2.5]) that the Fourier-multiplier operator with symbol \(\xi '\mapsto ({|\xi ' |}{|x_3 |})^me^{-{|\xi ' |}{|x_3 |}}\) is a bounded operator on \(\textrm{L}^{r}({{\mathbb {R}}^2})\) with operator norm independent of \(x_3\), that is,
We return to (5.14) and employ (5.15) to deduce
where the restriction in the norm of the left-hand side to the twofold real line \({\dot{{\mathbb {R}}}}\) in the second estimate is required since \(\partial _{x_3}{\mathcal {K}}(\varphi )\) has a singularity at \(x_3=0\). It follows that
This estimate shall serve as an interpolation endpoint. To obtain the opposite endpoint, we again employ (5.15) to infer
where the last estimate relies on the truncation introduced in \({\mathcal {K}}\). It follows that
Real interpolation yields
Consequently, (5.16) and (5.17) imply
whence \({\mathcal {K}}\) extends to a bounded operator \({\mathcal {K}}:\textrm{W}^{2-1/r,r}({{\mathbb {R}}^2})\rightarrow \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)\). Recalling the formula (5.13) for the solution u to (5.10) and that \({{\,\textrm{supp}\,}}{\mathscr {F}}_{{\mathbb {R}}^2}[b]\subset {\mathbb {R}}^2\setminus \textrm{B}_{1/2}(0)\), we clearly have \(u={\mathcal {K}}(b)\). It follows that \(\Vert u\Vert _{2,r}\le c\,\Vert b\Vert _{2-1/r,r}\). In a completely similar manner, one shows that also \(\Vert {\mathfrak {p}}\Vert _{1,r}\le c\,\Vert b\Vert _{2-1/r,r}\). Thus the lemma follows for this particular choice of \(b\in {\mathscr {S}}({{\mathbb {R}}^2})\). Since any \(b\in \textrm{W}^{2-1/r,r}({{\mathbb {R}}^2})\) with \({{\,\textrm{supp}\,}}{\mathscr {F}}_{{\mathbb {R}}^2}[b]\subset {\mathbb {R}}^2\setminus \textrm{B}_1(0)\) can be approximated in \(\textrm{W}^{2-1/r,r}({{\mathbb {R}}^2})\) by a sequence \(\{b_k\}_{k=1}^\infty \subset {\mathscr {S}}({{\mathbb {R}}^2})\) with \({{\,\textrm{supp}\,}}{\mathscr {F}}_{{\mathbb {R}}^2}[b]\subset {\mathbb {R}}^2\setminus \textrm{B}_{1/2}(0)\) via a standard mollifier procedure, we conclude the lemma in its entirety. \(\square \)
Lemma 5.7
Let \(r\in (1,\infty )\). For all \({H_1}\in \textrm{W}^{2-1/r,r}({{\mathbb {R}}^2})\) and \({H_2}\in \textrm{W}^{1-1/r,r}({{\mathbb {R}}^2})^3\) with \({{\,\textrm{supp}\,}}{\mathscr {F}}_{{\mathbb {R}}^2}[{H_1}]\subset {\mathbb {R}}^2\setminus \textrm{B}_1(0)\), \({{\,\textrm{supp}\,}}{\mathscr {F}}_{{\mathbb {R}}^2}[{H_2}]\subset {\mathbb {R}}^2\setminus \textrm{B}_1(0)\) and \({H_2}\cdot e_3=0\) there exists a solution \((u,{\mathfrak {p}})\in \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)^3\times \textrm{W}^{1,r}({\dot{{\mathbb {R}}}}^3)\) to
that satisfies
where \(C=C(r)\). Moreover, \({\mathscr {F}}_{{\mathbb {R}}^2}\big [u(\cdot ,x_3)\big ](\xi ')\) and \({\mathscr {F}}_{{\mathbb {R}}^2}\big [{\mathfrak {p}}(\cdot ,x_3)\big ](\xi ')\) are supported away from \((\xi ',x_3)\in B_{1/2}(0)\times {\mathbb {R}}\).
Proof
Put
Let \(\kappa _{1/4}\in \textrm{C}^{\infty }_0({\mathbb {R}}^2)\) with \(\kappa _{1/4}=0\) on \(\textrm{B}_{1/4}(0)\) and \(\kappa _{1/4}=1\) on \({\mathbb {R}}^2\setminus \textrm{B}_{1/2}(0)\). Clearly, the truncated operator
corresponding to the Fourier multiplier appearing in (5.20) extends to a bounded operator \({{\mathcal {M}}}:\textrm{W}^{1-1/r,r}({{\mathbb {R}}^2})^3\rightarrow \textrm{W}^{2-1/r,r}({{\mathbb {R}}^2})^3\). The assumption \(\widehat{{H_2}}\subset {\mathbb {R}}^2\setminus \textrm{B}_1(0)\) implies that \(b_v={{\mathcal {M}}}({H_2})\). It follows that \(b\in \textrm{W}^{2-1/r,r}({{\mathbb {R}}^2})^3\), and we can therefore introduce the corresponding solution \((u,{\mathfrak {p}})\in \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)^3\times \textrm{W}^{1,r}({\dot{{\mathbb {R}}}}^3)\) to (5.10) from Lemma 5.6. By construction, \(u\cdot \textrm{n}={H_1}\) on \(\partial {\dot{{\mathbb {R}}}}^3\). Moreover, recalling (5.13) we compute
Consequently, \((u,{\mathfrak {p}})\) is a solution to (5.18). Employing (5.11) we deduce
and conclude the lemma. \(\square \)
Theorem 5.8
Let \(r\in (1,\infty )\) and
Then all solutions \((u,{\mathfrak {p}})\in \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)^3\times \textrm{W}^{1,r}({\dot{{\mathbb {R}}}}^3)\) to (5.9) satisfy
where \(C =C(r,k)>0\).
Proof
We decompose both the solution and the data into one part with lower and another part with higher frequency support in tangential directions \(e_1,e_2\). For this purpose, we introduce cut-off functions \(\kappa _\alpha \in \textrm{C}^{\infty }_0({\mathbb {R}}^2)\) with \(\kappa _\alpha =0\) on \(\textrm{B}_\alpha (0)\) and \(\kappa _\alpha =1\) on \({\mathbb {R}}^2\setminus \textrm{B}_{2\alpha }(0)\), and put
Similarly, we introduce \({\mathfrak {p}}_\#,{\mathfrak {p}}_\bot \) and \(f_\#,g_\#,h_{0\#},{h_{1\#}},{h_{2\#}}\). Observe that \((u_\#,{\mathfrak {p}}_\#)\) solves (5.9) with respect to data \((f_\#,g_\#,h_{0\#},{h_{1\#}},{h_{2\#}})\). We shall construct another solution satisfying estimate (5.21), and subsequently show that it coincides with \((u_\#,{\mathfrak {p}}_\#)\). To this end, we let \(g_\#^+\in \textrm{W}^{1,r}({\mathbb {R}}^3)\) denote an extension of \(g_\#\big | _{{\mathbb {R}}^3_+}\) to \(\textrm{W}^{1,r}({\mathbb {R}}^3)\). Specifically employing Heesten’s extension operator (see for example [1, Theorem 4.26]) one readily verifies that the extension retains the property that the Fourier transform (in tangential directions) \({\mathscr {F}}_{{\mathbb {R}}^2}\big [g_\#^+(\cdot ,x_3)\big ](\xi ')\) is supported away from \((\xi ',x_3)\in B_1(0)\times {\mathbb {R}}\). Consequently,
is well defined. Similarly, we introduce an extension of \(g_\#\big | _{{\mathbb {R}}^3_-}\) to \(\textrm{W}^{1,r}({\mathbb {R}}^3)\) and construct a field \(G_\#^-\in \textrm{W}^{2,r}({{\mathbb {R}}^3})^3\) as above. Letting
we then obtain a field \(G_\#\in \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)^3\) with \({{\,\textrm{div}\,}}G_\#=g_\#\) in \({\dot{{\mathbb {R}}}}^3\). Moreover, a straight-forward application of Marcinkiewicz’s Multiplier Theorem (see for example [9, Corollary 5.2.5]) yields
Now put
Owing to the fact that \(G_\#,{{\,\textrm{div}\,}}\mathrm S(G_\#)\in \textrm{L}^{r}({{\mathbb {R}}^3})^3\) with \({\mathscr {F}}_{{\mathbb {R}}^3}[G_\#]\) and \({\mathscr {F}}_{{\mathbb {R}}^3}[{{\,\textrm{div}\,}}\mathrm S(G_\#)]\) supported away from 0, the expressions above are well defined and yield functions with \(V_\#\in \textrm{W}^{2,r}({{\mathbb {R}}^3})^3\) and \(Q_\#\in \textrm{W}^{1,r}({{\mathbb {R}}^3})\) satisfying
Moreover, another straight-forward application of Marcinkiewicz’s Multiplier Theorem yields
Utilizing Lemma 5.6, we construct a solution \((W_\#,\Pi _\#)\in \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)^3\times \textrm{W}^{1,r}({\dot{{\mathbb {R}}}}^3)\) to
satisfying
Finally, by Lemma 5.7 there is a solution \(({\widetilde{W}}_\#,\widetilde{\Pi }_\#)\in \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)^3\times \textrm{W}^{1,r}({\dot{{\mathbb {R}}}}^3)\) to
which obeys
It follows that
is a solution to (5.9) with \((f_\#,g_\#,h_{0\#},{h_{1\#}},{h_{2\#}})\) as the right-hand side, and that \((U_\#,{\mathfrak {P}}_\#)\in \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)^3\times \textrm{W}^{1,r}({\dot{{\mathbb {R}}}}^3)\) satisfies
Consequently, \((U_\#,{\mathfrak {P}}_\#)\) and \((u_\#,{\mathfrak {p}}_\#)\) solve the same equations. Using a classical duality argument, we shall show that they coincide. To this end, let \(\varphi \in \textrm{C}^{\infty }_0({\mathbb {R}}^3)\) and put \({\varphi _{\#}}:={\mathscr {F}}^{-1}_{{\mathbb {R}}^2}\big [\kappa _{1/4}(\xi '){\mathscr {F}}_{{\mathbb {R}}^2}[\varphi (\cdot ,x_3)]\big ]\). Employing the same procedure as above, we construct a solution \(({\mathfrak {z}}_{\#},{\mathfrak {q}}_{\#})\in \textrm{W}^{2,r'}({\dot{{\mathbb {R}}}}^3)^3\times \textrm{W}^{1,r'}({\dot{{\mathbb {R}}}}^3)\) to (5.9) with right-hand side \(({\varphi _{\#}},0,0,0,0)\). Since by construction both \({\mathscr {F}}_{{\mathbb {R}}^2}\big [U_\#(\cdot ,x_3)\big ](\xi ')\) and \({\mathscr {F}}_{{\mathbb {R}}^2}\big [u_\#(\cdot ,x_3)\big ](\xi ')\) are supported away from \((\xi ',x_3)\in B_{1/2}(0)\times {\mathbb {R}}\), we compute
Since \(\varphi \) can be taken arbitrarily, we obtain \(u_\#=U_\#\), and in turn from (5.9) also \({\mathfrak {p}}_\#={\mathfrak {P}}_\#\). It follows that also \((u_\#,{\mathfrak {p}}_\#)\) satisfies (5.22) and thus
Finally, from \({\mathscr {F}}_{{\mathbb {R}}^2}\big [u_{\bot }(\cdot ,x_3)\big ](\xi ')\subset \textrm{B}_1(0)\times {\mathbb {R}}\) and \({\mathscr {F}}_{{\mathbb {R}}^2}\big [{\mathfrak {p}}_\bot (\cdot ,x_3)\big ](\xi ')\subset \textrm{B}_1(0)\times {\mathbb {R}}\) it follows via the Marcinkiewicz Multiplier Theorem that \(\Vert \nabla _{x'}\nabla u_{\bot }\Vert _r+\Vert \nabla _{x'}{\mathfrak {p}}_\bot \Vert \le c\,\Vert u_{\bot }\Vert _{r}\). Introducing the decomposition \(u=u_\#+u_{\bot }\) in (5.9) and isolating \(\partial _3u_{\bot 3}\) on the left-hand side in (5.9)\(_{2}\), we then infer after differentiation that \(\Vert \partial _3^2u_{\bot 3}\Vert _r\le c\Vert u_{\bot }\Vert _{r}\). Subsequently isolating \(\partial _3{\mathfrak {p}}_\bot \) in the third coordinate equation of (5.9)\(_{1}\), we deduce \(\Vert \partial _3{\mathfrak {p}}_\bot \Vert _{1,r}\le c\Vert u_{\bot }\Vert _{r}\). Lastly isolating \(\partial _3^2u_{\bot 1}\) and \(\partial _3^2u_{\bot 2}\) in the first and second coordinate equation of (5.9)\(_{1}\), respectively, we further deduce \(\Vert \partial _3^2u_{\bot 1}\Vert _r+\Vert \partial _3^2u_{\bot 2}\Vert _r\le c\Vert u_{\bot }\Vert _{r}\). In conclusion,
Combining (5.23) and (5.24) we conclude (5.21) and thus the theorem. \(\square \)
5.3 A Priori Estimates for Strong Solutions
We return to the linearized two-phase-flow Navier–Stokes problem (5.1), where \(\Omega \) is an open set of the same type as in Sect. 4, i.e., satisfying (4.1). Based on the estimates obtained in the twofold-half-space case in Theorem 5.8, we shall establish \(\textrm{L}^{r}\) estimates of solutions to (5.1). The Oseen case \(({\lambda _0}\ne 0)\) and Stokes case \(({\lambda _0}= 0)\) are treated separately in Theorem 5.9 and Theorem 5.10, respectively.
Theorem 5.9
Let \(\Gamma \) be a \(\textrm{C}^{5}\)-smooth surface, \(q\in (1,\frac{3}{2})\), \(r\in (3,\infty )\) and \(\overline{\lambda }>0\). For every \(0<{\lambda _0}\le \overline{\lambda }\) and \((f,g,{h_1},{h_2})\in {\textbf{Y}}^{q,r}_1\times {\textbf{Y}}^{q,r}_{2,3}\times {\textbf{Y}}^{q,r}_4\) there exists a unique solution \((u,{\mathfrak {p}})\in {{\textbf{X}}^{q,r}_{1,{\lambda _0}}}\times {\textbf{X}}^{q,r}_2\) to (5.1) satisfying
Moreover,
where \(C=C(\Omega ,q,r,\overline{\lambda })>0\).
Proof
We first consider data
so that the theorems from Sect. 5.1 can be applied. Recalling the regularity of \(\Gamma \), Theorems 5.2, 5.3 and 5.4 yield a solution \((u,{\mathfrak {p}})\in \textrm{D}^{1,2}_0({\mathbb {R}}^3)^3\times \textrm{L}^{2}_0({\mathbb {R}}^3)\) to (5.1) satisfying
We fix an \(R>\delta (\Omega )\) and observe that \((u,{\mathfrak {p}})\in \textrm{W}^{2,r}(\Omega _{2R})^3\times \textrm{W}^{1,r}(\Omega _{2R})\) by Sobolev embedding. According to the regularity assumptions, \(\Gamma \) can be covered by a finite number of balls \(\Gamma \subset \bigcup _{i=1}^m \textrm{B}_{r_i}(x_i)\) each of which upon a rotation \(\textrm{R}_i\) can be mapped to \(\textrm{B}_{r_i}(0)\) by a \(\textrm{C}^{5}\)-diffeomorphism \(\Phi _i\), that is, \(\Phi _i\circ \textrm{R}_i:\textrm{B}_{r_i}(x_i)\rightarrow \textrm{B}_{r_i}(0)\), in such a way that \(\Phi _i\circ \textrm{R}_i\big (\Gamma \cap \textrm{B}_{r_i}(x_i)\big )=\{x\in \textrm{B}_{r_i}(0)\ \mid \ x_3=0\}\) and with \(\Vert \nabla \Phi _i\Vert _\infty \) arbitrarily small for sufficiently small radii \(r_i\), \(i=1,\ldots ,m\). The covering can clearly be augmented with bounded open sets \(O_1\subset \subset \Omega ^{(1)}\) and \(O_2\subset \subset \Omega ^{(2)}_{2R}\) so that \(\overline{\Omega _R}\subset \cup _{i=1}^m\textrm{B}_{r_i}(x_i)\cup O_1 \cup O_2\). Employing a partition of unity subordinate to such a covering, we can decompose and transform the solution \((u,{\mathfrak {p}})\) into m solutions \((u_i,{\mathfrak {p}}_i)\in \textrm{W}^{2,r}({\dot{{\mathbb {R}}}}^3)^3\times \textrm{W}^{1,r}({\dot{{\mathbb {R}}}}^3)\), \(i=1,\ldots ,m\), to the twofold half-space Stokes problem (5.9), two solutions \((u_{m+1},{\mathfrak {p}}_{m+1}),(u_{m+2},{\mathfrak {p}}_{m+2})\in \textrm{W}^{2,r}({\mathbb {R}}^3)^3\times \textrm{W}^{1,r}({\mathbb {R}}^3)\) to a whole-space Stokes problem, and finally one solution \((w,{\mathfrak {q}})\in \textrm{D}^{1,2}_0({\mathbb {R}}^3)^3\times \textrm{L}^{2}_0({\mathbb {R}}^3)\) to the whole-space Oseen problem
In all three cases, the data contain lower-order terms of \(u\) and \({\mathfrak {p}}\) supported in \(\textrm{B}_{2R}\). Furthermore, the data in the twofold half-space Stokes equations satisfied by \((u_i,{\mathfrak {p}}_i)\), \(i=1,\ldots ,m\), also contain higher-order terms of \(u\) and \({\mathfrak {p}}\) supported in \(\textrm{B}_{2R}\) and multiplied with components of \(\nabla \Phi _i\). By Sobolev embeddings, we have \(w\in \textrm{D}^{1,2}_0({\mathbb {R}}^3)\hookrightarrow \textrm{L}^{6}({{\mathbb {R}}^3})\), and it is therefore easy to verify, for example by applying the Fourier transform in (5.28), that \((w,{\mathfrak {q}})\) coincides with the solution from [8, Theorem VII.4.1] and therefore satisfies
with a constant \(c=c(q,r,\overline{\lambda })\) independent of \({\lambda _0}\). A similar estimate is satisfied by the solutions \((u_{m+1},{\mathfrak {p}}_{m+1})\) and \((u_{m+2},{\mathfrak {p}}_{m+2})\) to the whole-space Stokes problems by [8, Theorem IV.2.1]. Moreover, Theorem 5.8 implies that \((u_i,{\mathfrak {p}}_i)\), \(i=1,\ldots ,m\), also satisfies the estimate, provided a covering is chosen with \(\Vert \nabla \Phi _i\Vert _\infty \) sufficiently small, so that the higher-order terms can be absorbed on the left-hand side. We thus conclude
where \(c=c(\Gamma ,q,r,\overline{\lambda })>0\). It remains to show that the lower-order terms of \(u\) and \({\mathfrak {p}}\) on the right-hand side can be neglected. This can be achieved by a standard contradiction argument. Assuming that
does not hold, one can utilize (5.30) to construct a sequence \((\lambda _n,u_n,{\mathfrak {p}}_n)\) normalized such that \(\Vert u_n\Vert _{\textrm{W}^{1,r}(\Omega _{2R})} + \Vert {\mathfrak {p}}_n\Vert _{\textrm{L}^{r}(\Omega _{2R})}=1\) and with \(\lambda _n\rightarrow \lambda \) and \((u_n,{\mathfrak {p}}_n)\) weakly convergent in the Banach space
to a solution \((u,{\mathfrak {p}})\) to (5.1) with parameter \(\lambda \in [0,\overline{\lambda }]\) and homogeneous right-hand side. The restriction \(q<\frac{3}{2}\) is critical in this step. Theorem 5.5 implies \((u,{\mathfrak {p}})=(0,0)\), contradicting \(\Vert u\Vert _{\textrm{W}^{1,r}(\Omega _{2R})} + \Vert {\mathfrak {p}}\Vert _{\textrm{L}^{r}(\Omega _{2R})}=1\) obtained due to the compactness of the embeddings \(\textrm{D}^{2,r}(\Omega )\cap \textrm{L}^{\frac{3q}{3-2q}}(\Omega )\hookrightarrow \textrm{W}^{1,r}(\Omega _{2R})\) and \(\textrm{D}^{1,r}(\Omega )\cap \textrm{L}^{\frac{3q}{3-q}}(\Omega )\hookrightarrow \textrm{L}^{r}(\Omega _{2R})\). We conclude (5.31). Therefore, the lower-order terms of \(u\) and \({\mathfrak {p}}\) on the right-hand side in (5.30) can be neglected, which yields (5.26). Uniqueness of the solution follows from Theorem 5.5, and the theorem is thereby established for data satisfying (5.27). However, it is easy to verify that data satisfying (5.27) are dense in the space \({\textbf{Y}}^{q,r}_1\times {\textbf{Y}}^{q,r}_{2,3}\times {\textbf{Y}}^{q,r}_4\). Consequently, the general case follows by a density argument. \(\square \)
Theorem 5.10
Let \(\Gamma \) be a \(\textrm{C}^{5}\)-smooth closed surface, \(q\in (1,\frac{3}{2})\), \(r\in (3,\infty )\) and \({\lambda _0}=0\). For every \((f,g,{h_1},{h_2})\in {\textbf{Y}}^{q,r}_1\times {\textbf{Y}}^{q,r}_{2,3}\times {\textbf{Y}}^{q,r}_4\) there exists a unique solution \((u,{\mathfrak {p}})\) to (5.1) with
that satisfies (5.25) and
where \(C=C(q,r,\Omega )>0\).
Proof
The proof is similar to that of Theorem 5.9, the only difference being that \({\lambda _0}=0\) in (5.28). This implies that \((w,{\mathfrak {q}})\) solves a whole-space Stokes problem instead of an Oseen problem. Therefore, we use [8, Theorem IV.2.1] in this case to obtain estimate (5.33). The rest of the proof is identical to that of Theorem 5.9. \(\square \)
6 Reformulation on a Fixed Domain
The steady-state equations of motion as expressed in (2.14) in a frame attached to the barycenter of the falling drop form a classical free boundary problem. Specifically, the boundary \(\Gamma \) depends on the unknown height function \(\eta \). For further analysis it is necessary to refer all unknowns in this so-called current configuration to a fixed domain reference configuration. This section is devoted to such a reformulation.
As mentioned in the introduction and further elaborated on in Sect. 2, we investigate a falling drop whose stress-free configuration, i.e., the configuration when the density in the two liquids is the same, is the unit ball \(\textrm{B}_1\) in non-dimensionalized coordinates. Our aim is to establish existence of steady-state configurations close to the stress-free configuration \(\textrm{B}_1\) for small density differences. Canonically, we therefore choose
as the fixed liquid reference domain.
In order to refer the equations of motion to \({\Omega _0}\), we first construct a suitable coordinate transformation \(\Phi ^\eta \) based on the height function \(\eta \). For technical reasons, it is important that \(\Phi ^\eta \) retains any rotational symmetry possessed by \(\eta \).
Lemma 6.1
Let \(r\in (3,\infty )\). There is an extension operator
satisfying \({{\,\textrm{Tr}\,}}_{{\mathbb {S}}^2} E(\eta )=\eta \,{{\,\textrm{Id}\,}}\), \({{\,\textrm{supp}\,}}E(\eta )\subset \textrm{B}_4\) and
The extension operator is invariant with respect to rotations, that is, for all \(R\in SO(3)\):
If \(r>3\), there is a \(\delta _0>0\) such that for any \(\eta \in \textrm{W}^{3-1/r,r}({\mathbb {S}}^2)\) with \(\Vert \eta \Vert _{\textrm{W}^{3-1/r,r}}<\delta _0\) the mapping
is continuous and maps \({\Omega _0}\) \(\textrm{C}^{2}\)-diffeomorphically onto \(\Omega =\Omega _\eta \) with
Proof
For \(\eta \in \textrm{W}^{3-1/r,r}({\mathbb {S}}^2)\) let \(H_\eta \in \textrm{W}^{3,r}(\textrm{B}_4\setminus {\mathbb {S}}^2)\) denote the unique solution to
Since the Laplace operator is rotational invariant, also the solution \(H_\eta \) is invariant with respect to rotations of the data \(\eta \). Let \(\chi \in \textrm{C}^{\infty }_0({\mathbb {R}})\) be a cut-off function with \(\chi (s)=1\) for \({|s |}\le 2\) and \(\chi (s)=1\) for \({|s |}\ge 3\). Putting
we obtain an operator with the desired properties. Observe that \(E(\eta )\in \textrm{W}^{1,r}({\mathbb {R}}^3)\). Therefore, \(\Phi ^\eta (x):=x+E(\eta )(x)\) is a well-defined pointwise mapping \(\Phi ^\eta :{\mathbb {R}}^3\rightarrow {\mathbb {R}}^3\). Since \(r>3\), the Sobolev embedding \(\textrm{W}^{3,r}({\mathbb {R}}^3\setminus {\mathbb {S}}^2)\hookrightarrow \textrm{C}^{2}({\mathbb {R}}^3\setminus {\mathbb {S}}^2)\) implies that \(\Phi ^\eta \in \textrm{C}^{2}({\Omega _0})\). Moreover, by (6.1) we clearly have \(\det \nabla \Phi ^\eta =\det \big (\textrm{I}+\nabla E(\eta )\big )>0\) when \(\Vert \eta \Vert _{\textrm{W}^{3-1/r,r}({\mathbb {S}}^2)}\) is sufficiently small. In this case, \(\Phi ^\eta \) is a \(\textrm{C}^{2}\)-diffeomorphism onto its image \(\Omega \) by the global inverse function theorem of Hadamard. \(\square \)
We shall use \(\Phi ^\eta \) to change the coordinates and consequently express (2.14) in the reference configuration \({\Omega _0}\). To this end, we set
In order to simplify the notation, we put
and introduce the transformed stress tensor
Observe that an application of the Piola identity yields
The normal vector \(\textrm{n}_\Gamma \) at \(\Gamma \) expressed in the coordinates of the reference configuration is given by
and the transformed tangential projection by
With this notation, the steady-state equations of motion (2.14) take the following form in the reference configuration:
with respect to unknowns \((w,{\mathfrak {q}},\lambda ,\eta )\). We use the notation \(\textrm{n}=\textrm{n}_{{\mathbb {S}}^2}\) in the following.
In the next step, we exploit an inherent symmetry in (6.9) and simplify the system by replacing (6.9)\(_{7}\) with
We shall a posteriori verify that a solution to the simplified system exhibits axial symmetry around \(e_3\) and consequently satisfies
Consequently, a solution to the simplified system
with unknowns \((w,{\mathfrak {q}},\lambda ,\eta )\) is also a solution to (6.9). The analysis in the remaining part of the article is carried out on the system (6.10).
7 Linearization
A main challenge is to identify a suitable linearization of (6.10) such that the fully nonlinear system can be solved via a perturbation technique. Indeed, as explained in the introduction, the trivial linearization obtained by neglecting all nonlinear terms is not suitable since it leads to a Stokes-type rather than an Oseen-type problem. Instead, we shall linearize the equations around a non-trivial first-order approximation.
In order to identify the first-order approximation, we utilize an idea going back to Happel and Brenner [11] and introduce as auxiliary field a solution to the system
By Theorem 5.10, a solution \((U,{\mathfrak {P}})\) to (7.1) exists with
Moreover, standard regularity theory for the Stokes problem implies that both \(U\) and \({\mathfrak {P}}\) are smooth in \(\Omega _0\), and well-known decay estimates for the 3D exterior domain Stokes problem (see for example [8, Theorem V.3.2]) yield
Additionally, both the Stokes operator and the boundary operator on the left-hand side of (7.1) are invariant with respect to rotations. Since the data on the right-hand side is clearly invariant with respect to rotations \(R\in SO(3)\) leaving \(e_3\) invariant, the solution \((U,{\mathfrak {P}})\) retains this symmetry:
By adding a constant to \({\mathfrak {P}}^{(1)}\), that is, replacing \({\mathfrak {P}}\) with
we may assume, by choosing the constant C appropriately, that
Moreover, we utilize (7.1)\(_{5}\) to compute
We can therefore choose
This choice of \({\lambda _0(\widetilde{\rho })}\) combined with the fact that the symmetry (7.4) implies
means that \(({\lambda _0(\widetilde{\rho })}U,{\lambda _0(\widetilde{\rho })}{\mathfrak {P}},{\lambda _0(\widetilde{\rho })},0)\) is a solution to the trivial linearization of (6.10) around the zero state, that is, to the system obtained by neglecting in (6.10) all nonlinear terms with respect to \((w,{\mathfrak {q}},\lambda ,\eta )\). The state \(({\lambda _0(\widetilde{\rho })}U,{\lambda _0(\widetilde{\rho })}{\mathfrak {P}},{\lambda _0(\widetilde{\rho })},0)\) can therefore be seen as a first-order approximation of the solution to (6.10).
We shall seek to linearize (6.10) around \(({\lambda _0(\widetilde{\rho })}U,{\lambda _0(\widetilde{\rho })}{\mathfrak {P}},{\lambda _0(\widetilde{\rho })},0)\). Since \(\widetilde{\rho }\ne 0\) implies \({\lambda _0(\widetilde{\rho })}\ne 0\), a linearization around \(({\lambda _0(\widetilde{\rho })}U,{\lambda _0(\widetilde{\rho })}{\mathfrak {P}},{\lambda _0(\widetilde{\rho })},0)\) would result in an Oseen-type problem. However, a direct linearization around \(({\lambda _0(\widetilde{\rho })}U,{\lambda _0(\widetilde{\rho })}{\mathfrak {P}},{\lambda _0(\widetilde{\rho })},0)\) is still precarious since \((U,{\mathfrak {P}})\) is a solution to a Stokes problem, whence a linearization around this state would bring about right-hand side terms inadmissible in an Oseen setting. Instead, we introduce a truncation of the state. More specifically, we let \(\chi \in \textrm{C}^{\infty }_0({\mathbb {R}})\) be a cut-off function with \(\chi (r)=1\) for \({|x |} \le 1\) and \(\chi (r)=0\) for \({|r |} \ge 2\), and define \(\chi _R\in \textrm{C}^{\infty }_0({\mathbb {R}}^3)\) by \(\chi _R(x):=\chi \big (R^{-1}{|x |}\big )\) for \(R>4\). Via the truncated auxiliary fields
we finally obtain the state \(({\lambda _0(\widetilde{\rho })}U_R,{\lambda _0(\widetilde{\rho })}{\mathfrak {P}}_R,{\lambda _0(\widetilde{\rho })},0)\) around which we shall linearize the system (6.10). Specifically, we let
and investigate (6.10) with respect to the unknowns \((u,{\mathfrak {p}},\kappa ,\eta )\).
To conclude the linearization, we express the mean curvature \(\textrm{H}\) on \(\Gamma \) as a function of \(\eta \). As in [12, Sect. 2.2.5], we obtain
where \(\Delta _{{\mathbb {S}}^2}\) and \(\nabla _{{\mathbb {S}}^2}\) denote the Laplace–Beltrami operator and the surface gradient on the unit sphere \({\mathbb {S}}^2\), respectively, and
Then we have
with
containing all the nonlinear terms.
We are now in a position to express (6.10) as a suitable perturbation of a linear problem with respect to the unknowns \((u,{\mathfrak {p}},\kappa ,\eta )\). Indeed, in a setting of velocity fields satisfying \(\llbracket u \rrbracket =0\) and \(\lim _{{|x |}\rightarrow \infty }u(x)=0\) we can express (6.10) equivalently as
where the linear operator \({{\mathcal {L}}}^{\lambda _0(\widetilde{\rho })}\) is given by
and the nonlinear operator \({{\mathcal {N}}}^{R,\widetilde{\rho }}=({{\mathcal {N}}}_1,\ldots ,{{\mathcal {N}}}_7)\) consists of the components
8 Main Theorems
The formulation (7.10) is compatible with the framework of function spaces introduced in Sect. 4. More specifically, we shall show that \({{\mathcal {L}}}^{\lambda _0}\) maps \({{\textbf{X}}^{q,r}_{\lambda _0}}({\Omega _0})\) homeomorphically onto \({\textbf{Y}}^{q,r}({\Omega _0})\), and a solution to the fully nonlinear problem (7.10) can be established via the contraction mapping principle. We start with the first assertion:
Theorem 8.1
Let \(q\in (1,\frac{3}{2})\), \(r\in (3,\infty )\) and \(0<{|{\lambda _0} |}\le \overline{\lambda }\). Then
is a homeomorphism with \(\Vert ({{\mathcal {L}}}^{\lambda _0})^{-1}\Vert \le C\) and \(C=C(q,r,\overline{\lambda })\) independent of \({\lambda _0}\).
Proof
We first show that \({{\mathcal {L}}}^{\lambda _0}\) is onto. To this end, we consider \((f,g,h_1,h_2,a_1,a_2,h_3)\in {\textbf{Y}}^{q,r}({\Omega _0})\) and establish existence of \((u, \widetilde{{\mathfrak {p}}}, \kappa ,\eta )\in {{\textbf{X}}^{q,r}_{\lambda _0}}({\Omega _0})\) such that \({{\mathcal {L}}}^{\lambda _0}(u, \widetilde{{\mathfrak {p}}}, \kappa ,\eta )=(f,g,h_1,h_2,a_1,a_2,h_3)\). By Theorem 5.9 there is a solution \((u,{\mathfrak {p}})\in {{\textbf{X}}^{q,r}_{1,{\lambda _0}}}({\Omega _0})\times {\textbf{X}}^{q,r}_2({\Omega _0})\) to (5.1) with \(\Omega =\Omega _0\). We put
and replace \({\mathfrak {p}}\) with
Then \((u,\widetilde{{\mathfrak {p}}})\) still solves (5.1), whence
Recalling (7.6), we can define
and thus obtain
It remains to solve \({{\mathcal {L}}}_{6}(\eta )=a_2\) and \({{\mathcal {L}}}_{7}(u,{\mathfrak {p}},\kappa ,\eta )=h_3\) with respect to \(\eta \). We briefly recall some properties of the operator \(\Delta _{\mathbb {S}}+2\). In particular, it is Fredholm in the setting \(\Delta _{\mathbb {S}}+2:\textrm{W}^{3-1/r,r}({\mathbb {S}}^2)\rightarrow \textrm{W}^{1-1/r,r}({\mathbb {S}}^2)\) (see for example [17, Theorem 7.4.3]). It is well known, and easy to verify by a direct computation, that the components of the outer normal \(\textrm{n}\) on \({\mathbb {S}}^2\) span its kernel, that is, \(\ker (\Delta _{\mathbb {S}}+2)={{\,\textrm{span}\,}}\{\textrm{n}_1,\textrm{n}_2,\textrm{n}_3\}\). We denote the projection onto this kernel and the corresponding complementary projection by
The self-adjoint nature of \(\Delta _{\mathbb {S}}+2\) implies that \({{\mathcal {P}}}\) is also a projection onto the kernel of its adjoint \((\Delta _{\mathbb {S}}+2)^*\). The Fredholm property thus implies that
We can therefore introduce
and obtain a solution \(\eta :=\eta _\parallel +\eta _\bot \in \textrm{W}^{3-1/r,r}({\mathbb {S}}^2)\) to
Moreover, integrating (8.6) over \({\mathbb {S}}^2\) and recalling both the choice of \(c_{\mathfrak {p}}\) in (8.1) and (7.5), we observe that
From (8.2), (8.4), (8.7) and (8.6) we deduce \({{\mathcal {L}}}^{\lambda _0}(u, \widetilde{{\mathfrak {p}}}, \kappa ,\eta )=(f,g,h_1,h_2,a_1,a_2,h_3)\) and consequently that \({{\mathcal {L}}}^{\lambda _0}\) is onto. Uniqueness of the solution \((u, \widetilde{{\mathfrak {p}}}, \kappa ,\eta )\) is a direct consequence of Theorem 5.9 and (8.5), which means that \({{\mathcal {L}}}^{\lambda _0}\) is also injective. The operator is clearly continuous and therefore a homeomorphism. Furthermore, from Theorem 5.9 we deduce the estimate
with \(c=c(q,r,\overline{\lambda })\) independent of \({\lambda _0}\). In turn, we estimate in (8.3)
with \(c=c(q,r,\overline{\lambda })\) independent of \({\lambda _0}\). Since additionally
we conclude
with \(c=c(q,r,\overline{\lambda })\) independent of \({\lambda _0}\). It follows that \(\Vert ({{\mathcal {L}}}^{\lambda _0})^{-1}\Vert \le c\) with \(c=c(q,r,\overline{\lambda })\) independent of \({\lambda _0}\). \(\square \)
The proof that the composition \(({{\mathcal {L}}}^{\lambda _0})^{-1}\circ {{\mathcal {N}}}^{R,\widetilde{\rho }}\) is a contraction is prepared in the following two lemmas. We first establish estimates of the change-of-coordinate matrices.
Lemma 8.2
Let \(r\in (3,\infty )\). There is \(\delta _1>0\) such that for all \(\eta _1, \eta _2\in \textrm{W}^{3-1/r,r}({\mathbb {S}}^2)\) with \(\Vert \eta _j\Vert _{\textrm{W}^{3-1/r,r}}\le \delta _1\) \((j=1,2)\) the following estimates are valid:
where \(C=C(\delta _1,r)\).
Proof
Recalling (6.7), we observe that \(\textrm{I}-A_{\eta _1}\) contains only terms of first and second order with respect to components of \(\nabla E(\eta _1)\). Utilizing that \(\textrm{W}^{2,r}({\mathbb {R}}^3\setminus {\mathbb {S}}^2)\) is an algebra for \(r>3\), and the Sobolev embedding \(\textrm{W}^{2,r}({\mathbb {R}}^3\setminus {\mathbb {S}}^2)\hookrightarrow \textrm{W}^{1,\infty }({\mathbb {R}}^3\setminus {\mathbb {S}}^2)\), we deduce
The first assertion of the lemma then follows from (6.1) in Lemma 6.1. The next assertions follows in a similar manner. Concerning the estimates involving \(F_{\eta _1}^{-1}\), we recall from (6.5)–(6.7) that \(F_{\eta _1}^{-1}=J_{\eta _1}^{-1}A_{\eta _1}\). Consequently, we obtain an estimate of \(\Vert \textrm{I}-F_{\eta _1}^{-1}\Vert _{\textrm{W}^{1,\infty }}\) as above, provided \(J_{\eta _1}\) is bounded away from 0. To this end, we recall (6.6) and choose \(\delta _1\) so small that \(J_{\eta _1}>\frac{1}{2}\) for \(\Vert \eta _1\Vert _{\textrm{W}^{3-1/r,r}}\le \delta _1\). One may now verify the rest of the assertions analogously. \(\square \)
The linearization (7.10) is a result of expressing the velocity field and pressure term as a perturbation (7.9) around a truncated auxiliary field \((U_R,{\mathfrak {P}}_R)\). The truncation is necessary to avoid right-hand side terms in (7.10) with inadmissible decay properties. Instead, compactly supported right-hand side terms appear. Suitable estimates of these terms are established in the following lemma. In particular, the magnitude of their norms are estimated in terms of the distance R of the truncation \(\chi _R\) from the drop domain:
Lemma 8.3
Let \(q\in \big (1,\frac{3}{2}\big )\), \(r\in (3,\infty )\) and \(\delta _1\) be the constant from Lemma 8.2. For all \(\eta _1, \eta _2\in \textrm{W}^{3-1/r,r}({\mathbb {S}}^2)\) with \(\Vert \eta _j\Vert _{\textrm{W}^{3-1/r,r}}\le \delta _1\) \((j=1,2)\)
where \(C=C(q,r,\delta _1)\). Moreover,
where \(C=C(q,r,\delta _1)\).
Proof
Let \(\eta =\eta _1\). Recalling from Lemma 6.1 that \(A_\eta (x)=F_\eta (x)=\textrm{I}\) for \({|x |}\ge 4\), we utilize Lemma 8.2 to estimate
Recalling the truncation (7.8), the pointwise decay of the auxiliary fields (7.3), and that \({{\,\textrm{supp}\,}}\nabla \chi _R\subset \textrm{B}_{2R,R}\) with \({|\nabla \chi _R(x) |}\le c R^{-1}\) as well as \({|\nabla ^2\chi _R(x) |}\le c R^{-2}\), we further obtain
Since \(r>q\), we obtain an even better estimate for \(\Vert {{\,\textrm{div}\,}}\mathrm T(U_R,{\mathfrak {P}}_R)\Vert _r\) with respect to decay in R, and thus conclude the first assertion of the lemma. The other inequalities in (8.8) follow in a similar manner.
The most critical estimate in (8.9) is the second one. Employing Lemma 8.2 together with the integrability properties (7.2) and the pointwise decay (7.3) of the auxiliary fields, we conclude
since \(R>4\). The remaining estimates in (8.9) are verified in a similar fashion. \(\square \)
We are now in a position to show existence of a solution to (7.10).
Theorem 8.4
Let \(q\in \big (1,\frac{4}{3}\big ]\), \(r\in (3,\infty )\) and \(\frac{3}{4}<\alpha <1\). There is an \(\varepsilon >0\) such that for all \(0<{|\widetilde{\rho } |}<\varepsilon \) there is an \(R>0\) and a solution \((u,{\mathfrak {p}},\kappa ,\eta )\in {{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}(\Omega _0)\) to
which satisfies
This solution is unique in the class of elements in \({{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}(\Omega _0)\) satisfying (8.11).
Proof
We let \(R:=R(\widetilde{\rho }):={|\widetilde{\rho } |}^{-\alpha }\) and show (8.10) by establishing existence of a fixed point of the mapping
for sufficiently small \(\widetilde{\rho }\). To ensure that \({{\mathcal {M}}}\) is well defined, observe that
and
which implies
Moreover, a change of coordinates yields \({{\mathcal {N}}}_4(u,{\mathfrak {p}},\kappa ,\eta )\cdot \textrm{n}=0\), and we conclude that \({{\mathcal {N}}}^{R(\widetilde{\rho }),\widetilde{\rho }}(u,{\mathfrak {p}},\kappa ,\eta )\in {\textbf{Y}}^{q,r}({\Omega _0})\) after establishing the corresponding estimates below. By fixing some \(\overline{\lambda }\) and choosing \(\varepsilon \) so small that \({|{\lambda _0(\widetilde{\rho })} |}\le \overline{\lambda }\), Theorem 8.1 ensures that \({{\mathcal {L}}}^{\lambda _0(\widetilde{\rho })}\) is invertible from \({\textbf{Y}}^{q,r}({\Omega _0})\) onto \({{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}(\Omega _0)\), and \({{\mathcal {M}}}\) therefore well defined. In the next step, we show that \({{\mathcal {M}}}\) is a contractive self-mapping on the ball \(\textrm{B}_{{\widetilde{\rho }^\alpha }}(0)\subset {{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}(\Omega _0)\). To this end, consider \((u,{\mathfrak {p}},\kappa ,\eta )\in \textrm{B}_{{\widetilde{\rho }^\alpha }}(0)\). The most critical part of the proof is to obtain a suitable estimate of \({{\mathcal {N}}}^{R(\widetilde{\rho }),\widetilde{\rho }}(u,{\mathfrak {p}},\kappa ,\eta )\). We first utilize Lemma 8.3 and recall from (7.7) that \({\lambda _0(\widetilde{\rho })}\) depends linearly on \(\widetilde{\rho }\) to estimate
An application of Lemma 8.2 yields
Lemma 8.2 also implies \(\Vert A_\eta \Vert _\infty \le c(\delta _1)\). Employing first Hölder’s inequality and then estimate (4.4) from Proposition 4.1 with \(t=2\), we obtain
since \(\frac{3}{4}<\alpha \). Further applications of Hölder’s inequality in combination with the integrability properties (7.2) of \(U\) yield
since \(\frac{1}{2}<\alpha \). From the integrability properties (7.2) we also obtain \(U_R\cdot \nabla U_R\in \textrm{L}^{s}({\mathbb {R}}^3)\) for all \(s>1\) and thus
We move on to the so-called drift terms. Recalling that \(A_\eta =\textrm{I}\) on \(\textrm{B}_4^c\), we estimate
and similarly
Finally, we once more employ Lemma 8.3 to deduce
Summarizing (8.12)–(8.19), we conclude \(\Vert {{\mathcal {N}}}_1(u,{\mathfrak {p}},\kappa ,\eta )\Vert _q= o\big ({|\widetilde{\rho } |}^\alpha \big )\ \text {as }{|\widetilde{\rho } |}\rightarrow 0\), which is the most critical estimate of the proof. With less effort, the same estimate can be established for \(\Vert {{\mathcal {N}}}_1(u,{\mathfrak {p}},\kappa ,\eta )\Vert _r\). Hence, \(\Vert {{\mathcal {N}}}_1(u,{\mathfrak {p}},\kappa ,\eta )\Vert _{{\textbf{Y}}^{q,r}_1}= o\big ({|\widetilde{\rho } |}^\alpha \big )\) as \({|\widetilde{\rho } |}\rightarrow 0\). The other components \({{\mathcal {N}}}_2,\ldots ,{{\mathcal {N}}}_7\) of \({{\mathcal {N}}}^{R(\widetilde{\rho }),\widetilde{\rho }}(u,{\mathfrak {p}},\kappa ,\eta )\) are estimated similarly. In particular, employing that \(\textrm{W}^{1,r}({\mathbb {S}}^2)\) is an algebra due to \(r>3\), the nonlinear term \(\Vert {{\mathcal {G}}}_\textrm{H}(\eta )\Vert _{\textrm{W}^{1-1/r,r}({\mathbb {S}}^2)}\) can be estimated such that we obtain
Since \(\alpha <1\), we deduce \(\Vert {{\mathcal {N}}}_7(u,{\mathfrak {p}},\kappa ,\eta )\Vert _{{\textbf{Y}}^{q,r}_7}= o\big ({|\widetilde{\rho } |}^\alpha \big )\) and thus \(\Vert {{\mathcal {N}}}(u,{\mathfrak {p}},\kappa ,\eta )\Vert _{{\textbf{Y}}^{q,r}}= o\big ({|\widetilde{\rho } |}^\alpha \big )\) as \({|\widetilde{\rho } |}\rightarrow 0\). Recalling from Theorem 8.1 that \(\Vert \big ({{\mathcal {L}}}^{\lambda _0(\widetilde{\rho })}\big )^{-1}\Vert \) is independent of \({\lambda _0(\widetilde{\rho })}\), we conclude that also \(\Vert {{\mathcal {M}}}\Vert _{{{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}}= o\big ({|\widetilde{\rho } |}^\alpha \big )\) as \({|\widetilde{\rho } |}\rightarrow 0\). Consequently, \({{\mathcal {M}}}\) is a self-mapping on the ball \(\textrm{B}_{{|\widetilde{\rho } |}^\alpha }(0)\subset {{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}(\Omega _0)\) for sufficiently small \({|\widetilde{\rho } |}\). Estimates completely similar to the ones above can be used to verify that \({{\mathcal {M}}}\) is also a contraction on \(\textrm{B}_{{|\widetilde{\rho } |}^\alpha }(0)\subset {{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}(\Omega _0)\) for sufficiently small \({|\widetilde{\rho } |}\). Therefore, the contraction mapping principle (or Banach’s Fixed Point Theorem) yields a unique fixed point \((u,{\mathfrak {p}},\kappa ,\eta )\) in \(\textrm{B}_{{|\widetilde{\rho } |}^\alpha }(0)\) of \({{\mathcal {M}}}\), which is clearly a solution to (8.10) satisfying (8.11). \(\square \)
Finally, we are able to prove the main theorem of the article.
Proof of Theorem 2.1
Choosing the parameters as in Theorem 8.4, we let \((u,{\mathfrak {p}},\kappa ,\eta )\in {{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}(\Omega _0)\) denote the corresponding solution to (8.10).
A boot-strapping argument based on coercive \(\textrm{L}^{r}\) estimates in the whole and half space for the principle part of the operators \({{\mathcal {L}}}_{1-4}\) and \({{\mathcal {L}}}_{7}\), furnished by Theorem 5.8 in the former case and well-know estimates for the classical Laplace operator in the latter case, yields higher-order regularity. More specifically, after smoothing out the boundary in the \({{\mathcal {L}}}_{1-4}\) part of equation (8.10), difference quotients of \((u,{\mathfrak {p}})\) can be estimated using Theorem 5.8, which implies additional regularity of \((u,{\mathfrak {p}})\). In turn, classical \(\textrm{L}^{r}\) estimates for the Laplace operator in the 2D whole space yields bounds on difference quotients for \(\eta \) after smoothing out the interface in the \({{\mathcal {L}}}_{7}\) part of equation (8.10). In both cases, we choose \(\varepsilon \) and thus \({|\widetilde{\rho } |}\) sufficiently small in order to absorb higher-order terms from the right-hand side. Bootstrapping this procedure, we conclude regularity of arbitrary order for both \((u,{\mathfrak {p}})\) and \(\eta \), and thereby deduce that the solution is smooth up to the boundary.
We further claim that the solution is invariant with respect to rotations that leave the \(e_3\)-axis invariant. To this end, consider an arbitrary \(R\in SO(3)\) with \(Re_3=e_3\). Define
Utilizing that (7.4) leads to rotation invariance of \((U_R,{\mathfrak {P}}_R)\), and that (6.2) implies \(\Phi ^{\widetilde{\eta }}(x)=R^\top \Phi ^\eta (Rx)\), one readily verifies that \(({\widetilde{u}},\widetilde{{\mathfrak {p}}},\widetilde{\kappa },\widetilde{\eta })\in {{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}(\Omega _0)\) is another solution to (8.10) satisfying (8.11). The uniqueness assertion of Theorem 8.4 therefore yields \((u,{\mathfrak {p}},\kappa ,\eta )=({\widetilde{u}},\widetilde{{\mathfrak {p}}},\widetilde{\kappa },\widetilde{\eta })\), and we conclude the claimed rotational symmetry of the solution.
Now recall from (7.9) that a solution to (7.10) yields a solution \((w,{\mathfrak {q}},\lambda ,\eta )\) to (6.10). Due to the rotation symmetry of \((w,{\mathfrak {q}},\lambda ,\eta )\), we thereby obtain a solution in \({{\textbf{X}}^{q,r}_{\lambda _0(\widetilde{\rho })}}(\Omega _0)\) to (6.9). Finally recalling (6.4), we deduce existence of a solution \((v,{\mathfrak {p}},\lambda ,\eta )\) to (2.14) satisfying (2.15) and (2.18).
Since \(v\in \textrm{X}^{q,r,{\lambda _0}}_{\textrm{Oseen}}\big ({\Omega ^{(2)}_\eta }\big )\), we may “test” the system with \(v\), i.e., multiplication of (2.14)\(_{1}\) by \(v\) and subsequent integration by parts is a valid computation. Under the assumption \(\lambda =0\) this computation yields \(\widetilde{\rho }=0\). Since we are assuming \(\widetilde{\rho }\ne 0\), we conclude that also \(\lambda \ne 0\).
Finally, since \((v,{\mathfrak {p}})\) solves the classical Navier–Stokes equations in a 3D exterior domain with \(v\in \textrm{X}^{q,r,{\lambda _0}}_{\textrm{Oseen}}\big ({\Omega ^{(2)}_\eta }\big )\) and \(\lambda \ne 0\), the integrability properties (2.16) and asymptotic structure (2.17) follow from [8, Theorem X.6.4] and [8, Theorem X.8.1], respectively. \(\square \)
Data Availability
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Notes
An explicit formula for \(\varGamma _{\text {Oseen}}^\lambda \) can be found in [8, Sect. VII.3] for example.
References
Adams, R.A.: Sobolev Spaces. Academic Press, New York (1975)
Agmon, S., Douglis, A., Nirenberg, L.: Estimates near the boundary for solutions of elliptic partial differential equations satisfying general boundary conditions. II. Commun. Pure Appl. Math. 17, 35–92 (1964)
Albert, C., Kromer, J., Robertson, A., Bothe, D.: Dynamic behaviour of buoyant high viscosity droplets rising in a quiescent liquid. J. Fluid Mech. 778, 485–533 (2015)
Babenko, K.: On stationary solutions of the problem of flow past a body of a viscous incompressible fluid. Math. USSR Sb. 20, 1–25 (1973)
Bemelmans, J.: Liquid drops in a viscous fluid under the influence of gravity and surface tension. Manuscr. Math. 36, 105–123 (1981)
Bemelmans, J., Galdi, G.P., Kyed, M.: On the steady motion of a coupled system solid-liquid. Mem. Am. Math. Soc. 226 (2013)
Galdi, G.P.: On the asymptotic structure of \(D\)-solutions to steady Navier–Stokes equations in exterior domains. In: Mathematical Problems Relating to the Navier–Stokes Equation, vol. 11 of Ser. Adv. Math. Appl. Sci., pp. 81–104. World Sci. Publ., River Edge, NJ (1992)
Galdi, G.P.: An Introduction to the Mathematical Theory of the Navier–Stokes Equations: Steady-State Problems, 2nd edn. Springer, New York (2011)
Grafakos, L.: Classical Fourier Analysis, 2nd edn. Springer, New York (2008)
Grafakos, L.: Modern Fourier Analysis, 2nd edn. Springer, New York (2009)
Happel, V., Brenner, H.: Low Reynolds Number Hydrodynamics. Prentice-Hall (1965)
Prüss, J., Simonett, G.: Moving Interfaces and Quasilinear Parabolic Evolution Equations, vol. 105 of Monographs in Mathematics. Birkhäuser/Springer, [Cham] (2016)
Shibata, Y., Saito, H.: Global Well-posedness for Incompressible-Incompressible Two Phase Problem. Lecture Notes
Solonnikov, V.A.: On a steady motion of a drop in an infinite liquid medium. Zap. Nauchn. Sem. S.-Peterburg. Otdel. Mat. Inst. Steklov. (POMI), 233 (1996)
Solonnikov, V.A.: On the problem of a steady fall of a drop in a liquid medium. J. Math. Fluid Mech., 1 (1999)
Solonnikov, V.A., Scadilov, V.E.: On a boundary value problem for a stationary system of Navier–Stokes equations. Proc. Steklov Inst. Math. 125, 186–199 (1973)
Triebel, H.: Theory of Function Spaces. II, vol. 84 of Monographs in Mathematics. Birkhäuser Verlag, Basel (1992)
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors state that there is no conflict of interest.
Additional information
Communicated by G. P. Galdi.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Eiter, T., Kyed, M. & Shibata, Y. Falling Drop in an Unbounded Liquid Reservoir: Steady-state Solutions. J. Math. Fluid Mech. 25, 34 (2023). https://doi.org/10.1007/s00021-023-00777-9
Accepted:
Published:
DOI: https://doi.org/10.1007/s00021-023-00777-9