
Abstract
We study new examples of translating solitons of the mean curvature flow, especially in Minkowski space. We consider for this purpose manifolds admitting submersions and cohomegeneity one actions by isometries on suitable open subsets. This general setting also covers the classical Euclidean examples. As an application, we completely classify time-like, invariant translating solitons by rotations and boosts in Minkowski space.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The evolution by mean curvature flow is classically studied for hypersurfaces in the Euclidean space \(\mathbb {R} ^{n+1}\). One of the approaches is to consider particular solutions, the so-called translating solitons or translators, which are invariant by a subgroup of translations of the ambient space. It is well-known that they admit a forever flow, characterized by a constant (unit) vector \(v\in \mathbb {R}^{n+1}\), \(n\ge 1\), in such a way that the mean curvature flow equation simplifies to
Translators have been widely studied in literature ([2, 5, 11, 13],\(\ldots \), and references therein). For instance, they naturally appear in the study of solutions of the mean curvature flow with a certain type of singularities (see for example [7]) and are equivalent to minimal surfaces for a conformally modified metric [8]. There are other studies for translators in other ambients spaces, such as \(\mathbb {R}\times M\) [12], in \(\mathbb {H}^2\times \mathbb {R}\) [4], a solvable group [15], the Heisenberg 3-group [16], etc.
One of the first analytical point of view was to see which of them were rotationally invariant [5]. This approach can be revisited from a geometrical point of view, in the sense that they are invariant by the Lie group \(SO(n-1)\). Thus, the PDE is rapidly reduced to an ODE, which is simpler to study. Translating solitons were studied from an analytical point of view in the Lorentz–Minkowski space, [10], focusing on the rotationally invariant case and only for space-like hypersurfaces. Again, the underlying geometrical structure is the use of the Lie group SO(n) as a subgroup of isometries.
In this paper, we are interested in studying graphical translating solitons in Minkowski space by the action of some subgroups of isometries. From a pure analytical point of view, we seek to simplify the PDE to an ODE by a group of transformations. However, adding a geometrical sauce provides an extra layer of flavour. To do so, we wished to use quotients, although we realized that suitable tools are submersions, for almost the same effort. Those who wish to stick to the analytical taste can jump directly to Sects. 5 and 6.
Typical examples are cohomogeneity one actions by Lie groups. If the action of a group \(\Sigma \) is proper and free, the orbit space becomes a smooth manifold (with boundary), and the natural projection is a submersion. This holds when M is Riemannian and \(\Sigma \) is compact, acting by isometries. However, the situation becomes much more complicated when the action is not proper. Fortunately, it is still possible to work on some good open subsets \(\Omega \) of M quite often, because the orbit space \(\Omega /\Sigma \) is diffeomorphic to an open interval, even when \(M/\Sigma \) is not Hausdorff.
Since our starting point was to study translators in Lorentz–Minkowski space, the base manifolds of the quotients have to be either Riemannian or Lorentzian. To unify the notations, we are forced to consider pseudo-Riemannian submersions. The advantage is that we can make a quite more general study, although we will return to our origins in the last sections.
We will mainly focus on graphical translating solitons. Namely, given \(u\in C^2(M)\), we construct its graph map \(F:M\rightarrow M\times \mathbb {R}\), \(F(x)=(x,u(x))\), and we assume that its induced metric is not degenerate. Let \(\nu \) be the upward normal vector along F with \(\varepsilon =\left\langle \nu ,\nu \right\rangle =\pm 1\). We recall that \(\varepsilon =-1\) when F(M) is space-like, and \(\varepsilon =+1\) if time-like. In Sect. 2, we show that the mean curvature flow is characterized by the following partial differential equation, which is similar to the one obtained in the classical case (see [5])
As in [4, 5, 12], we show in Sect. 3 that it is possible to simplify this PDE to an ODE under reasonable assumptions on the geometry of the manifold M, namely when M admits a submersion \(\pi :(M,g)\rightarrow (I,{\tilde{\varepsilon }} ds^2)\) whose fibers \(\pi ^{-1}(s)\) have constant mean curvature h(s), where I is an interval, \(\tilde{\varepsilon }=\pm 1\). In Theorem 3.5, we prove that a function \(f\in C^2(M)\) is solution to the ODE
if, and only if, the graph map \(F:M\rightarrow M\times \mathbb {R}\), \(F(x)=(x,(f\circ \pi )(x))\), is a translating soliton. Next, we will give some results about the behavior of translating solitons within this context. Corollary 3.7 generalizes the well-known Wing-like translating soliton in \(\mathbb {R}^{m+1}\), [5], whose tangent planes at some points are vertical, and thus, they are not graphical at such points. The standard idea is to rewrite the ODE by putting f as the inverse function of a given \(\alpha \). Corollary 3.9 is an existence result for globally defined graphical solutions.
Section 4 is devoted to analytical computations, which are necessary for the final sections.
Section 5 is devoted to applying all these ideas to rotationally invariant translating solitons in Minkowski space \(\mathbb {L}^{n+1}\), \(n\ge 2\), that is to say, those invariant by the action of SO(n) as a subgroup of isometries of \(\mathbb {L}^{n+1}\). Also, in Sect. 6, we consider the Lie group \(SO^{\uparrow }(n-1,1)\) acting on \(\mathbb {L}^{n+1}\), \(n\ge 2\). We focus on the time-like cases, because the space-like cases were already considered in [10] (although without the Geometrical topping). Probably, the most surprising result is the fact that there is an example which crosses more than one fundamental region. Or in other words, we need more than one profile curve to obtain the whole surface, by gluing up four pieces lying in continuous open subsets. Probably, this unusual and slippery technique seems to prevent many people from studying time-like examples, but makes the Lorentzian setting surprisingly different from the classical Euclidean case.
2 Setup
Let (M, g) be a connected pseudo-Riemannian manifold. We consider \(u\in C^2(M,\mathbb {R})\), let \(F:M\rightarrow M\times \mathbb {R}=:{\bar{M}}\), \(F(p)=(p,u(p))\) be its graph map. We denote \((p,t)\in M\times \mathbb {R}\). We denote by \(\vert w\vert _g^2={g(w,w)}\) the squared g-norm of any tangent vector w to M. Assume that \(F:(M,\gamma =F^*\left\langle ,\right\rangle )\rightarrow ({\bar{M}},\left\langle ,\right\rangle =g+\varepsilon 'dt^2)\) is a non-degenerate hypersurface, where \(\varepsilon '=\pm 1\). Under the usual identifications, for each \(X\in TM\), we have
where \(\nabla u\) is the g-gradient of u. We consider the metric \(\gamma =F^*\left\langle ,\right\rangle \) on M. By assumption, \(\gamma \) is non-degenerate. The upward normal vector field is
where we are assuming that \(\varepsilon :=\mathrm {sign}\big (\varepsilon '+\vert \nabla u\vert _g^2\big )=\pm 1\) is a constant function on the whole M. Note that \(\left\langle \nu ,\nu \right\rangle =\varepsilon \). It is important to remark our definitions of the mean curvature vector and function. In our setting, if \(II_F\) is the second fundamental form, the mean curvature vector is
where H is the mean curvature function. Similar notations will be used for other hypersurfaces along the paper.
The following proposition is well-known in the Euclidean setting (see for example [11]). The proof is similar in the pseudo-Riemannian context, but we include it for completeness and discuss the necessary modifications.
Proposition 2.1
Under the previous setting, F is a (vertical) translating soliton if, and only if, function u satisfies
Proof
Take a local g-orthonormal frame \(B=(e_1,\ldots ,e_n)\) on M, such that \(g(e_i,e_j)=\varepsilon _i\delta _{ij}\) for any \(i,j=1,\dots n\), with \(\varepsilon _i=\pm 1\) depending on the signature of g. We denote \(u_i=du(e_i)\), \(i=1,\ldots ,n\). For this frame, we compute the induced metric \(\gamma =F^{*}\left\langle ,\right\rangle \), so that the coefficients of the Gram matrix and of its inverse are
Let \({\bar{\nabla }}\) the Levi-Civita connection of \(({\bar{M}},\left\langle ,\right\rangle )\). We recall O’Neill’s book [14], and its equations for the Levi-Civita connection of a (warped) product. Then,
so that
By recalling that \(W^2=\varepsilon (\varepsilon '+g(\nabla u,\nabla u))\), we compute
Coming back
Corollary 2.2
Let (M, g) be a compact orientable manifold without boundary. Then, M does not admit any globally defined, non-degenerate, graphical, space-like Translating Soliton \(F:M\rightarrow (M\times \mathbb {R},g+\varepsilon 'dt^2)\).
Proof
Assume that there exists a globally defined graphical Translating Soliton on M. Then, for some function \(u\in C^2(M)\), Eq. (2.2) holds true. By using the volume form \(\mathrm{{d}}\mu _g\), we obtain
This is a contradiction. \(\square \)
3 Submersions and Lie Groups
Our next target consists of studying when the equation of the mean curvature flow can be reduced to a particular ODE. The main geometrical technique consists of using a Lie group acting by isomorphisms whose orbits are codimension one sumbanifolds, namely cohomogenity one actions. We choose the case when the image of the natural projection is going to be identified with an open interval. This is not a big deal, since one can remove the non-regular orbits, but later it might be necessary to see the possible extension. Before starting, we need the following technical lemma.
Lemma 3.1
Take \(\varepsilon ',\tilde{\varepsilon }\in \{\pm 1\}\), I an open interval and \(\pi :(M,g_{_M})\rightarrow (I,{\tilde{\varepsilon }} ds^2)\) a pseudo-Riemannian submersion such that each fiber \(\pi ^{-1}(s)\) has constant mean curvature h(s) w.r.t. \(-\nabla \pi \). Given \(f\in C^2(I)\), define \(u=f\circ \pi \in C^{2}(M)\). Assume that \(\varepsilon =\mathrm {sign}(\varepsilon '+ {\tilde{\varepsilon }} (f'\circ \pi )^2)=\pm 1\) is a constant function.
-
1.
\(h:I\rightarrow \mathbb {R}\) is a smooth function, and such that \(\mathrm {div}(\nabla \pi )=h\circ \pi \).
-
2.
\(\nabla u = (f'\circ \pi )\nabla \pi \), \(\vert \nabla u\vert _g^2= {\tilde{\varepsilon }} (f'\circ \pi )^2\), \(\mathrm {div}(\nabla u) = {\tilde{\varepsilon }} (f''\circ \pi )+(f'\circ \pi )(h\circ \pi )\).
-
3.
If \(W=+\sqrt{\varepsilon \big (\varepsilon '+ {\tilde{\varepsilon }}(f'(\pi ))^2\big )}\,>0\), then \(\nabla W =\displaystyle \frac{\varepsilon {\tilde{\varepsilon }} f'(\pi )f''(\pi )}{W}\nabla \pi .\)
Proof
First, given a local orthonormal frame \((e_1,\ldots ,e_n)\) such that \(e_n=\nabla \pi \) and the vector fields \(\{e_i\}_{i=1}^{n-1}\) are tangent to the fibers, with \(\varepsilon _i=g(e_i,e_i)\), then
For simpleness, we write \(f\circ \pi =f(\pi )\), etc. For the second statement, given \(p\in M\) and \(X\in T_pM\), we compute
and we point out that \(|\nabla \pi |_g^2={\tilde{\varepsilon }}\). Next,
Finally, \(2W\nabla W = \nabla (W^2) = 2{\tilde{\varepsilon }}\varepsilon f'(\pi )f''(\pi )\nabla \pi .\) \(\square \)
Proposition 3.2
Let (M, g) be a connected pseudo-Riemannian manifold and I an open interval. Let \(\Sigma \) be a Lie group acting by isometries on M and \(\pi :M\rightarrow I\) be a submersion such that the fibers of \(\pi \) are orbits of the action, and \(\nabla \pi \) is never zero or light-like. Then, there exist a constant \(\tilde{\varepsilon }=\pm 1\) and a smooth bijective map \(v:I\rightarrow J\subset \mathbb {R}\), J an interval, such that \(v\circ \pi :(M,g)\rightarrow (J,{\tilde{\varepsilon }} ds^2)\) is a pseudo-Riemannian submersion with constant mean curvature fibers.
Proof
Since \(\pi \) is a submersion, and \(\vert \nabla \pi \vert _g^2\ne 0\), there exists a smooth function \(z:I\rightarrow \mathbb {R}\backslash \{0\}\) such that \((z\circ \pi )^2 ={\tilde{\varepsilon }} \vert \nabla \pi \vert _g^2\), for a constant \({\tilde{\varepsilon }}=\pm 1\). Next, we consider a function \(v:I\rightarrow \mathbb {R}\) such that \(v'=1/z\). As \(v'\) has constant sign, v is injective, and we restrict it to its image, \(v:I\rightarrow J\). By Lemma 3.1, \(\vert \nabla (v\circ \pi )\vert ^2_g ={\tilde{\varepsilon }}\). In particular, \(v\circ \pi :(M,g)\rightarrow (J,{\tilde{\varepsilon }} ds^2)\) is a pseudo-Riemannian submersion. Note that the fibers of \(v \circ \pi \) are the same as the fibers of \(\pi \), which are the orbits of \(\Sigma \). As it acts by isometries, they have constant mean curvature w.r.t. \(-\nabla (v\circ \pi )\). \(\square \)
From now on, we assume that the action of the Lie group \(\Sigma \) on (M, g) by isometries is proper, and that at least one of the orbits is of codimension one. These are the well-known cohomogeneity one \(\Sigma \)-manifolds. According to [1] (and references therein), there is another Riemannian metric \(g_R\) such that \(\Sigma \) acts on \((M,g_R)\) by isometries, and the quotient \(M/\Sigma \) is diffeomorphic to an interval or to \(\mathbb {S}^1\equiv \mathbb {R}/\mathbb {Z}\). By removing the possible singular orbits (if any, up to two), we can assume that \(M/\Sigma =:I\) is (diffeomorphic to) an open interval. This works at differentiable level, so we can return to our original metric g, and the quotient is still an open interval. Let \(\pi :M\rightarrow I\equiv M/\Sigma \) be the projection. We need \(\nabla \pi \) not to be zero or light-like. By Lemma 3.2, we can assume that \(g_{_M}(\nabla \pi ,\nabla \pi )=\pm 1=:\tilde{\varepsilon }\), making \(\pi \) a pseudo-Riemannian submersion. Each fiber of \(\pi \) will be an orbit of \(\Sigma \). And because it acts by isometries, then each orbit \(\pi ^{-1}\{s\}\) will be of constant mean curvature h(s) w.r.t \(-\nabla \pi \). Thus, we have an associated smooth function \(h:I\rightarrow \mathbb {R}\). We need to bear in mind all this setting, so that we introduce the following definition.
Definition 3.3
Under the previous setting, let \(\Sigma _o\) one of the stabilizers of \(\Sigma \). Let \(\beta :I\rightarrow M\) be a unit curve orthogonal to all orbits of \(\Sigma \), such that the map
is a diffeomorphism and \(\pi \circ \phi (s,[\sigma ])=s\). We will say that (3.1) is a decomposition of M by \(\Sigma \), or that M is decomposable by \(\Sigma \), with associated function \(h:I\rightarrow \mathbb {R}\). We cannot forget the submersion \(\pi :(M,g)\rightarrow (I,\tilde{\varepsilon }ds^2)\).
Remark 3.4
For the sake of simpleness, sometimes is it better to use \(\phi :I\times \Sigma \rightarrow M\). But then, \(\phi (s,-):\Sigma \rightarrow M\) might not be an immersion, although the image is again an orbit.
We recall that a function \(u:M\rightarrow \mathbb {R}\) is called invariant by the Lie group \(\Sigma \), or also \(\Sigma \)-invariant, if it satisfies
Accordingly, we say that a graphical translating soliton is invariant by the Lie group \(\Sigma \), or also \(\Sigma \)-invariant, when its graph map is invariant by \(\Sigma \). Similarly, a translating soliton \(F:\Omega \subset M\rightarrow M\times \mathbb {R}\) is called \(\Sigma \)-invariant when \(\sigma \cdot F(x)\in F(\Omega )\) for each \(x\in \Omega \) and each \(\sigma \in \Sigma \).
Theorem 3.5
Let (M, g) be a pseudo-Riemannian manifold, decomposable by \(\Sigma \), as in Definition 3.3. Given \(\varepsilon '=\pm 1\), \(f:I\rightarrow \mathbb {R}\) a smooth function, construct the graph map \(F:M\rightarrow (M\times \mathbb {R},\left\langle ,\right\rangle =g_{_M}+\varepsilon 'dt^2)\), \(F(x)=(x,u(x))\), \(u=f\circ \pi \). Then, F is a \(\Sigma \)-invariant translating soliton if, and only if, f is a solution to
Proof of Theorem 3.5
We denote \(u=f\circ \pi \). Using Lemma 3.1 we get directly from Eq. (2.1),
Therefore, we conclude that (2.2) reduces to
In other words, function f is a solution to (3.3). \(\square \)
Remark 3.6
Another approach is to start with a \(\Sigma \)-invariant function \(u:M\rightarrow \mathbb {R}\). But then, we immediately obtain another function \(f:I\rightarrow \mathbb {R}\) such that \(u=f\circ \pi \).
On the other hand, we can extend the action of \(\Sigma \) to \(M\times \mathbb {R}\) as follows:
In fact, given any curve \(\delta :J\subset I\rightarrow I\times \mathbb {R}\), \(\delta =(\delta _1,\delta _2)\), we can construct a map whose image is \(\Sigma \)-invariant, namely
We will now give some general results about the behavior of solutions. This next result states the existence of the so-called wing-like solutions.
Corollary 3.7
Assume there M is decomposable as in Definition 3.3, where h is the mean curvature of the orbits of the action. Consider \(s_o\in I\) such that either \(h(s_o)\ne 0\), or \(s_o\) is an isolated zero of h. Then, for each \(y_o\in \mathbb {R}\), there exist a real number \(\rho >0\) and a translating soliton \(F:(y_o-\rho ,y_o+\rho )\times (\Sigma /\Sigma _o) \rightarrow {\bar{M}}\) such that it is the union of two graphical translating solitons.
Proof
Choose \(y_o\in \mathbb {R}\). We consider the following IVP:
As usual, there exists a smooth solution \(\alpha :(y_o-\rho ,y_o+\rho )\rightarrow \mathbb {R}\). Note that \(y_o\) is a critical point of \(\alpha \) and \(\alpha ''(y_o)=\varepsilon 'h(s_o).\)
Case \(h(s_o)\ne 0\): Then, \(y_o\) is an extremum of \(\alpha \). The restrictions \(\alpha _+=\alpha \vert _{(y_o,y_o+\rho )}\) and \(\alpha _{-}=\alpha \vert _{(y_o-\rho ,y_o)}\) will be injective, by reducing \(\rho \) if necessary. Construct their inverse functions \(f_+=\alpha _+^{-1}\) and \(f_{-}=\alpha _{-}^{-1}\). We just have to show that \(f_+\) and \(f_{-}\) satisfy (3.3). To do so, we put \(f_{+}(\alpha (y))=y\), and therefore
Next, we change \(s=\alpha (y)\), and then \(\alpha '(y)=1/f'_+(s)\), so that
A similar computation holds for \(f_{-}\). The union of the corresponding graphical translating solitons and their common boundary provide a smooth translating soliton, because \(\alpha \) is a smooth map and \(f_{+}\), \(f_{-}\) are tools to reparametrize its graph.
Case \(s_o\) is an isolated zero of h: By shrinking \(\rho \) if necessary, then \(\alpha ''(y)\ne 0\) for any \(y\ne y_o\), \(y\in (y_o-\rho ,y_o+\rho )\). The restriction \(\alpha '\vert _{[y_o,y_o+\rho )}\) will be injective, and therefore, \(\alpha '(y)\ne 0\) for any \(y\in (y_o,y_o+\rho )\). This makes \(\alpha \vert _{(y_o,y_o+\rho )}\) also injective. Similarly, \(\alpha \vert _{(y_o-\rho ,y_o)}\) is injective. We continue as in the previous case \((h(s_o)\ne 0)\).
In either case, it is possible to obtain a smooth curve \(\tau :(y_o-\rho ,y_o+\rho )\rightarrow I\times \mathbb {R}\), \(\tau =(\tau _1,\tau _2)\), which is the union of both graphs. Then, our translating soliton is constructed by using (3.4). \(\square \)
Remark 3.8
By (3.1), \({\bar{M}}\) is diffeomorphic to \(I\times (\Sigma /\Sigma _o)\times \mathbb {R}\), so the profile curve \(\tau \) of Corollary 3.7 can be embedded into \(I\times \{[\sigma ]\}\times \mathbb {R}\) for some \([\sigma ]\in (\Sigma /\Sigma _o)\). At a certain point, \(\partial _t\) (\(t\in \mathbb {R}\)) will be tangent to the image of \(\tau \) (as in the proof of previous lemma). The causal character of the product will therefore influence the causal character of the translating soliton. Moreover the causal character of the submersion (i.e. the sign of \(\tilde{\varepsilon }\)) as well as the sign of \(\varepsilon '+{\tilde{\varepsilon }} f'^2\) will determine the causal character of the winglike soliton. For example, when M is Riemannian, the product \(M\times \mathbb {R}\) is Lorentzian (i.e. \(\varepsilon '=-1\)), and the submersion is Riemannian (as in the rotationally invariant example of Sect. 5), the wing-like translating solitons have to be time-like, since for space-like solitons, \(\alpha '(y_0)\) cannot be 0 for any \(y_0\).
Corollary 3.9
Assume that M is decomposable as in Definition 3.3. Take \(\tilde{\varepsilon },\varepsilon '\in \{\pm 1\}\) such that \(\tilde{\varepsilon }\varepsilon '=-1\). Given f a local solution to (3.3) and \(s_o\in I\), such that \((f'(s_o))^2<1\), then f can be globally extended to \(f:I\rightarrow \mathbb {R}\). In particular, the associated \(\Sigma \)-invariant translating soliton is graphical and it can be globally defined on M.
Proof
By Theorem 3.5, any \(\Sigma \)-invariant translating soliton will be obtained by a solution f to (3.3). We make the change \(w=f'\), so it reduces to \(w'(s) = (\tilde{\varepsilon }+\varepsilon 'w(s)^2) (1 - w(s)h(s))\). Since \(\tilde{\varepsilon }\varepsilon '=-1\), the constant functions \(w(s)=\pm 1\) are solutions to this differential equation. Then, given an initial condition \((s_o,f_1)\in I\times (-1,1)\), there exists a local solution \(w:(s_o-\rho ,s_o+\rho )\rightarrow \mathbb {R}\) such that \(w(s_o)=f_1\) and \(\vert w\vert <1\). By the uniqueness of solutions to IVP, w cannot reach the values \(\pm 1\), and so, it can be globally extended to \(w:I\rightarrow (-1,1)\). We define \(f(s)=f_o+\int _{s_o}^s w(x)\mathrm{{d}}x\) for some \(f_o\in \mathbb {R}\). By using the curve \(\delta :I\rightarrow I\times \mathbb {R}\), \(\delta (s)=(s,f(s))\), we can (re)construct our \(\Sigma \)-invariant translating soliton by (3.4). \(\square \)
Remark 3.10
This section generalizes several classical results in a general geometric context. A well-known example is the case of a rotationally invariant translating soliton in \(\mathbb {R}^{n+1}\). We consider the Lie group SO(n) acting by isometries on \(\mathbb {R}^n\) which gives rise to the Riemannian submersion \(\pi :\mathbb {R}^{n}\backslash \{0\}\rightarrow \mathbb {R},\,\pi (x)=\Vert x\Vert \), and the Riemannian product \({\bar{M}}=(\mathbb {R}^n\times \mathbb {R},g^{\mathbb {R}^n}+dt^2)\). An easy computation shows that the mean curvature of the fiber \(\pi ^{-1}(s)\) is \(h(s)=(n-1)/s\). Using Theorem 3.5, we recover the well-known ODE for rotationally invariant translating solitons \(f''=(1+f^2)(1-\frac{n-1}{s}f')\), studied in [5], where such solitons are classified. In that paper, it is shown that there exist only two types: a globally defined graphical soliton, the so-called bowl soliton or translating paraboloid, which can be seen as a particular application of our Corollary 3.9, and a family of non-graphical wing-like translators or translating catenoids, obtained by gluing two graphical solutions, which are a special case of Corollary 3.7.
4 All Solutions to an ODE
In this section, we will need some tools which can be found in the book [18]. Our targent is to find all local solutions to the following equation, for \(s>0\),
or rather
where \(n\ge 2\) is a natural number. Clearly, there are two degenerate examples, namely, \({\hat{f}}_{\pm }:(0,\infty )\rightarrow \mathbb {R}\), \({\hat{f}}_{\pm }(s)=\pm s+f_o\), \(f_o\in \mathbb {R}\), that is, \({\hat{w}}_{\pm }(s)=\pm 1\).
4.1 The case when \(\vert x\vert <1\)
The following particular example was studied in [9].
Lemma 4.1
There exists a unique function \(f_B:\mathbb {R}\rightarrow \mathbb {R}\) such that f is even, analytical, and such that its derivative \(w_B=f'\) is the unique solution to the boundary problem
We consider the following open domains
Lemma 4.2
Any unextendable solution w inside \(\Omega \) is globally defined, \(w:(0,\infty )\rightarrow \mathbb {R}\), and it is one of the following:
- Case I:
-
The solution \(w_B=f':[0,\infty )\rightarrow \mathbb {R}\) of Lemma 4.1;
- Case II:
-
\(w>w_B\) everywhere, with one critical point \(s_1>0\), such that \(w(s_1)=s_1/(n-1)\), and \(\lim _{s\rightarrow 0}w(s)=1\).
- Case III:
-
\(w<w_B\) everywhere, without critical points, strictly increasing, with no critical points, and \(\lim _{s\rightarrow 0}w(s)=-1\).
In addition, all of them (also \(w_B\)) satisfy \(\lim _{s\rightarrow \infty }w(s)=1\).
Proof
Take \((s_o,w_o)\in \Omega \) initial conditions for (4.2), \(w(s_o)=w_o\), and let w be the solution. By the solutions \({\hat{w}}_{\pm }\), it will be globally defined \(w:(0,\infty )\rightarrow \mathbb {R}\) and its graph will remain inside \(\Omega \). Then, \(w'(s)=0\) for some point \(s\in (0,\infty )\) if, and only if, either \(w(s)=\pm 1\) (excluded) or \(w(s)=s/(n-1)\), at some point \(s\in (0,\infty )\). In other words, w will admit a critical point if its graph intersects the line r of equation \(x=s/(n-1)\) horizontally. As the line r is a monotonic curve, the solution can only intersects it at most once due to our ODE.
Case I. We already know the solution \(w_B=f':[0,\infty )\rightarrow \mathbb {R}\) of Lemma 4.1.
Case II. Take initial conditions \((s_o,w_o)\in \Omega _1\). The associated solution \(w:(0,\infty )\rightarrow \mathbb {R}\) will remain in \(\Omega _1\), due to the uniqueness of solutions to IVP. As \(w(s)<w_B(s)<s/(n-1)\) for any \(s>0\), then w has no critical points, and \(w'(s_o)>0\), so it is strictly increasing for any \(s>0\).
Since, \(w(s)<1\) for any \(s>0\), there exists \(\lim _{s\rightarrow +\infty } w(s)=w_1\in (-1,1]\) and \(\lim _{s\rightarrow +\infty }w'(s)=0\). However, \(0=\lim _{s\rightarrow +\infty }w'(s)=\lim _{s\rightarrow +\infty } (1-w(s)^2)(1-(n-1)w(s)/s)\) \(=1-w_1^2\). Therefore, \(\lim _{s\rightarrow +\infty } w(s)=1.\)
As \(w_B(0)=0\), and \(w(s)<w_B(s)\), there exists \(s_1>0\) such that \(w(s_1)=0\). We want to compute the limit of w(s) and of \(w'(s)\) when \(s\rightarrow 0\). As \(-1<w(s)\) and w is strictly increasing, then \(\lim _{s\rightarrow 0}w(s)=w_2\in [-1,0)\). Define now \(z:\mathbb {R}\rightarrow \mathbb {R}\), \(z(t)=w(e^t)\). Then, z is still strictly increasing, and \(z'(t)=(1-z(t)^2)(e^t-(n-1)z(t))\). Clearly, \(w_2=\lim _{t\rightarrow -\infty }z(t)\) and this implies \(0=\lim _{t\rightarrow -\infty }z'(t)=\lim _{t\rightarrow -\infty } (1-z(t)^2)(e^t-(n-1)z(t)) = -(n-1)(1-w_2^2)w_2\). This means that \(w_2=-1\). To summarize,
Again, by the uniqueness of solutions to IVP, we can parametrize this family by considering the initial values, \((0,+\infty )\ni s_0\), that is \((s_0,0)\in \Omega _1\), and the union of all the graphs of the solutions will foliate \(\Omega _1\).
Case III. Take initial conditions \((s_o,w_o)\in \Omega _2\). The associated solution \(w:(0,\infty )\rightarrow \mathbb {R}\) will remain in \(\Omega _2\), similarly to Case II. If \(w'(s)\ne 0\) for all s, its graph cannot cross the line r of equation \(x=s/(n-1)\) and it is strictly above the graph of \(w_B=f_B'\). But then, either \(w(s)>s/(n-1)\) for any \(s>0\), which is impossible since w is bounded by 1 and defined for all \(s>0\), and the line r crosses the horizontal line \(x=+1\); or \(s/(n-1)>w(s)>w_B(s)\) for any \(s>0\), which shows that \(\lim _{s\rightarrow 0}w(s)=0\). Then, we found a second solution to the problem (4.2) with boundary value \(w(0)=0\). By the uniqueness of the solution to this boundary problem, we get to a contradiction. Thus, there exists a unique \(s_1>0\) such that \(w(s_1)=s_1/(n-1)\), which is the only critical point. In this way, we parametrize this family by the open segment \(r\cap \Omega _2\). It is easy to compute that
Therefore, \(s_1\) is a absolute minimum of w. This means that w is strictly decreasing when \(0<s<s_1\) and strictly increasing when \(s>s_1\). For big \(s>0\), we know \(w_B(s)<w(s)<1\), which shows \(\lim _{s\rightarrow +\infty }w(s)=1.\) By similar computations to Case II, \(\lim _{s\rightarrow 0}w(s)=1\). \(\square \)
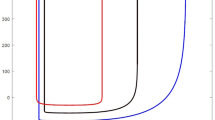
The following picture illustrates the solutions to (4.2) such that \(-1<w=f'<1\), for \(n=3\), made with wxMaxima©.

4.2 The case when \(\vert x\vert >1\)
For the following study, we define the open domains
Lemma 4.3
(Case IV) Any unextendable solution w contained in \(\Gamma _{-}\) is defined on \(w:(0,s_1)\rightarrow \mathbb {R}\), for some \(s_1>0\), it is strictly increasing, with \(\lim _{s\rightarrow 0}w(s)=1\) and having a finite time blow-up at \(s_1\).
Proof
Let \((s_0,w_o)\in \Gamma _{-}\) initial solutions for (4.2), \(w(s_o)=w_o<-1\). A local solution \(w:(s_o-\delta ,s_o+\delta )\rightarrow \mathbb {R}\) stays inside of \(\Gamma _{-}\). Since the line r does not intersects \(\Gamma _{-}\), w cannot have any critical point. And due to
then w is always strictly decreasing. As it is bounded by the constant solution \({\hat{w}}_{-1}(s)=-1\), w can be extended to \((0,s_o+\delta )\). Also, a simple computation shows \(\lim _{s\rightarrow 0}w(s)=-1\). Next, since \(1-(n-1)w_o/s_o>1\), for any \(s\ge s_o\) we have,
Therefore, the ODE (4.2) is dominated by the ODE \(z'(s)=1-z(s)^2\), whose general solution is \(z(s)=\coth (s+\rho )=\frac{e^{2(s+\rho )}+1}{e^{2(s+\rho )}-1}\), \(\rho \in \mathbb {R}\). We choose \(\rho \) such that \(z(s_o)=w_o=w(s_o)<-1\). From here, \(e^{2(s_o+\rho )}-1<0\) and \(\rho <0\), so that z can be extended at most to \((0,-\rho )\). But as \(w'(s)\le z'(s)<0\), then w has a finite-time blow-up at some \(s_1<-\rho \). \(\square \)
Lemma 4.4
Any unextandable solution to (4.2) included in \(\Gamma _+\) is one of the following:
- Case V:
-
There exists a unique \({\mathbf {w}}:(0,+\infty )\rightarrow \mathbb {R}\) which is strictly increasing, asymptotic to the line r of equation \(x=s/(n-1)\) at infinity, and \({\mathbf {w}}(s)>s/(n-1)\) for any \(s>0\).
- Case VI:
-
\(w:(0,+\infty )\rightarrow \mathbb {R}\) is globally defined, with just one critical point \(s_1>s_o\), \(\lim _{s\rightarrow +\infty }w(s)=1\), \(w(s)<{\mathbf {w}}(s)\) for any \(s>0\).
- Case VII:
-
\(w:(0,s_1)\rightarrow \mathbb {R}\) has a finite time blow up at certain \(s_1>s_o\), without critical points, and \(w(s)>{\mathbf {w}}(s)\) for any \(s<s_1\).
In addition, all of them satisfy (also \({\mathbf {w}}\)), \(\lim _{s\rightarrow 0}w(s)=1\) and \(\lim _{s\rightarrow 0}w'(s){=}0\).
Proof
Take \((s_o,w_o)\in \Gamma _{+}\) initial conditions for (4.2), and let w be the solution such that \(w(s_o)=w_o\). Its graph will remain inside \(\Gamma _{+}\). Also, w will have a critical point if its graph intersects the line r horizontally (\(w'(s_1)=0\) for some \(s_1>0\)), i. e, \(w(s_1)=s_1/(n-1)\). For any point \(s>s_1\), \(w'(s)<0\), whereas for any \(s<s_1\), \(w'(s)>0\) holds. In such case, \(s_1\) will be the only critical point, and its absolute maximum.
Step 1: Consider \((s_o,w_o)\in \Gamma _{+}\) such that \(w_o=s_o/(n-1)\), and a solution to (4.2) around \(s_o\), namely \(w:(s_o-\delta ,s_o+\delta )\rightarrow \mathbb {R}\), with \(w(s_o)=w_o=s_o/(n-1)\). By (4.2), \(w_o'(s_0)=0\), and it is its unique critical point.
Then, w will always be decreasing for \(s>s_0\). By the barrier solution \(w_1(s)=+1\), w can be extended to \(w:(s_o-\delta ,+\infty )\rightarrow \mathbb {R}\), with \(\lim _{s\rightarrow +\infty }w(s)=w_1\ge 1\), so that \(0=\lim _{s\rightarrow +\infty }w'(s)=\lim _{s\rightarrow +\infty }(1-w(s)^2)\big (1-(n-1)w(s)/s\big )=1-w_1^2\). This means
On the other hand, w will always be increasing for \(s<s_o\). Hence we can extend \(w:(0,+\infty )\rightarrow \mathbb {R}\), w increasing on \((0,s_o)\), and \(w(0)=w_2\ge 1\). As in Case II, by the change of variable \(s=e^t\), we get immediately that \(\lim _{s\rightarrow 0}w(s)=+1.\)
Step 2: As in Corollary 3.7, we get for each \(s_0>0\) a solution \(w=f_-'\) such that \(\lim _{s\rightarrow s_0}w(s)=+\infty \), i.e. with finite time blow up in \(s_0\). As in step 1, w can be extended to \((0,s_0)\) and similarly \(\lim _{s\rightarrow 0}w(s)=+1.\)
Step 3: We want to obtain the first type solution as explained above. We fix now \(s_o=n-1\). Define
By step 1, \(J\ne \emptyset \). By step 2 we have a solution \(w_n:(0,n)\rightarrow \mathbb {R}\), such that \(\lim _{s\rightarrow n}w_n(s)=+\infty \). Then, we have that \(j\le w_n(n-1)\) for all \(j\in J\). Thus, we can define \(A:=\sup J<w_n(n-1)\).
Now define \({\mathbf {w}}:(0,n-1+\delta )\rightarrow \mathbb {R}\) the solution to (4.2) such that \({\mathbf {w}}(n-1)=A\). Assume that \(\lim _{s\rightarrow s_1} {\mathbf {w}}=+\infty \) for some \(s_1>n-1\). But then let \(s_2=s_1+\varpi \), \(\varpi >0\). By step 2, there exists a blow up solution \(w_2\), such that \(\lim _{s\rightarrow s_2}w_2(s)=\infty \). Therefore \({\mathbf {w}}>w_2\) for all \(s\in (0,s_1]\). This is a contradiction with \(A=\sup J\). This means that \({\mathbf {w}}\) is globally defined.
Moreover, \({\mathbf {w}}\) has no critical points. Indeed, assume that there is a \(s_c>0\), such that \({\mathbf {w}}'(s_c)=0\). As before , \((s_c,w(s_c))\in r\). Then, by step 1 there exists another globally defined solution w, such that \(w'(s_c+1)=0\), but then by uniqueness of solutions \(w>{\mathbf {w}}\) for all s, which is a contraction to \(A=\sup J\). Therefore \({\mathbf {w}}\) is strictly increasing and bounded below by the line r, so that
We are going to show that \({\mathbf {w}}\) is asymptotic to the line r. Let \(K>1\). Suppose that for large enough \(s_1>0\), \({\mathbf {w}}'(s)>K/(n-1)\) for any \(s\ge s_1\). Then, there exists \(c\in \mathbb {R}\) such that for all \(s\ge s_1\), \({\mathbf {w}}(s)>Ks/(n-1)+c\). But now, there exists \(c_o>0\) such that \(\frac{(n-1){\mathbf {w}}(s)}{s}-1> \frac{n-1}{s}\left( \frac{Ks}{n-1}+c\right) -1=K-1+\frac{(n-1)c}{s}>c_0>0\) for large enough \(s\ge s_2\ge s_1\). And so, \({\mathbf {w}}'(s)>c_o\left( {\mathbf {w}}(s)^2-1\right) \) for any \(s\ge s_2\). Then, (4.2) dominates the ODE \(g'=c_o(g^2-1)\). The solution to this equation such that \(g(s_2)=w_o\) is given by
Since \(0<a<1\), g is well defined and positive. Therefore, for any \(s\ge s_2\), it holds \({\mathbf {w}}(s)\ge g(s)\). However, g has a blow up at \(s_3=s_2-\ln (a)/(2c_o)\). This shows that \({\mathbf {w}}\) has a blow up at \(s_4<s_3\). This is a contradiction. Therefore, since \({\mathbf {w}}\) cannot cross r, we get using L’Hospital that
Now we notice that since \({\mathbf {w}}>1\), (4.2) is equivalent to the expression
But now, as \({\mathbf {w}}\) is defined until \(+\infty \), and without critical points,
Summing up, the solution \({\mathbf {w}}\) is asymptotic to the line r.
Since \(A=\sup J\), take another globally defined solution \(w_B:(0,+\infty )\rightarrow \mathbb {R}\) such that \(w_B(n-1)<{\mathbf {w}}(n-1)\) and \(w_B<{\mathbf {w}}\) everywhere. Assume that \(w_B\) has no critical points. By similar computations as above, \(w_B\) will also be asymptotic to the line r. Then, the difference \(h={\mathbf {w}}-w_B\) will satisfy \(h>0\) and \(\lim _{s\rightarrow +\infty }h(s)=0\). By (4.2), \({\mathbf {w}}'>w_B'\) everywhere. But then, \(h'>0\), that is to say, h is strictly increasing everywhere. This is a contradition with \(\lim _{s\rightarrow +\infty }h(s)=0\).
In other words, there is a unique solution \({\mathbf {w}}\) globally defined on \((0,+\infty )\), with no critical points. We will keep this notation for the rest of the paper.
Finally, given \((s_o,w_o)\in \Gamma _{+}\), such that \({\mathbf {w}}(s_o)<w_o\), consider the solution to (4.2) such that \(w(s_o)=w_0\). As before, there exists \(w:(0,s_o+\delta )\rightarrow \mathbb {R}\) for some (small) \(\delta \). Assume that w is globally defined on \((0,+\infty )\). Then, \(w(n-1)>{\mathbf {w}}(n-1)=A\). This is a contradiction. Therefore, any other solution over \({\mathbf {w}}\) admits a finite-time blow-up. \(\square \)
The following picture illustrates this lemma, for \(n=3\), made with wxMaxima©.

5 The Action of the Group SO(n)
We consider \(\mathbb {R}^n\) with usual coordinates \(x=(x_1,\ldots ,x_n)\). To obtain a smooth Riemannian submersion, we restrict it to \(\pi :M=\mathbb {R}^n\backslash \{0\}\rightarrow (0,+\infty )\), \(\pi (x)=\sqrt{\sum _i x_i^2}\). Then,
for any \(x\in M\). Note that our map \(\pi \) is invariant by the standard action of SO(n) on \(\mathbb {R}^n\). Consider now the Minkowski space \(\mathbb {L}^{n+1}=\mathbb {R}^n\times \mathbb {R}\ni (x_1,\ldots ,x_{n+1})\) with standard flat metric \(g=\sum _{i=1}^ndx_i^2-dx_{n+1}^2\). In order to obtain a graphical SO(n)-invariant translating soliton, we consider \(u=f\circ \pi :M\rightarrow \mathbb {R}\), where \(f:I\subset (0,+\infty )\rightarrow \mathbb {R}\) is the desired function, which will be a solution to the ODE (3.3), which turns out to be
Then, we resort to Sect. 4, and make a geometrical interpretation. Clearly, the submersion \(\pi \) is Riemannian, hence \(\tilde{\varepsilon }=1\); the product is Lorentzian, and therefore \(\varepsilon '=-1\). Moreover, \(\varepsilon = \mathrm {sign}(-1+\vert \nabla u\vert ^2) = \mathrm {sign}(-1+(f'(\pi ))^2)=\pm 1\). If \(\varepsilon =-1\), the rotational surface is space-like, whereas \(\varepsilon =+1\) gives rise to a time-like surface. The space-like examples are characterized by \((f')^2<1\), since \(\varepsilon =-1\), but the time-like examples are those coming from \((f')^2>1\).
Example 1
From the above section, from each (inextendible) solution w to (3.3), we consider a primitive \(f=\int w\), which will be a solution to (4.1). Then, the hypersurface
is a SO(n)-invariant translating soliton. We are extending continously \(\pi \) to the rotation axis such that \(\pi (x)=0\) when x is a point of the axis. By the limits of w at 0 (Lemmatta 4.3 and 4.4 ), all these solutions f are asymptotic at the axis to a light-like straight line of equation \(x=\pm s+s_2\). Thus, all \(\Sigma _{f}\) will be asymptotic at the axis of rotation to a light-like cone.
-
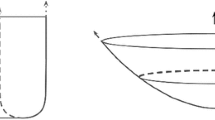
The Ogival Paraboloid: \(\Omega =\mathbb {R}^n\). Case V in Lemma 4.4, the function \(f=\int {\mathbf {w}}\) is asymptotic at infinity to an Euclidean parabola.
-
Timelike Calyx: \(\Omega =\mathbb {R}^n\). Case VI of Lemma 4.4, since w satisfies \(1=\lim _{s\rightarrow 0}w(s)=\lim _{s\rightarrow \infty }w(s)\), then \(\Sigma _{f}\) will be asymptotic to two upper light-like cones, one at the origin and one at infinity.
Example 2
The spindle: We consider an example of Lemma 4.3, Case IV, w and \(f_{-}=\int w\). Since \(w<-1\), then \(f_{-}\) is injective, so we can consider its inverse \(\alpha =f_{-}^{-1}\). Both functions are strictly decreasing. As \(f_{-}\) is defined on \((0,s_o)\), there exists \(\alpha :(a,b)\rightarrow \mathbb {R}\) such that \(\lim _{y\rightarrow a}\alpha (y)=s_o\) and \(\lim _{y\rightarrow b}\alpha (y)=0\). We are going to use the proof of Corollary 3.7. Then, \(\alpha \) is a solution to the ODE
Assume \(a=-\infty \). Since \(\lim _{s\rightarrow s_o}w'(s)=-\infty \), then \(\lim _{y\rightarrow -\infty }\alpha '(y)=0\), so that it also holds \(\lim _{y\rightarrow -\infty }\alpha ''(y)=0\). By inserting this in the ODE, \(0=\lim _{y\rightarrow -\infty } \alpha ''(y)=(1-n)/s_o\). This is a contradiction.
Therefore, \(a\in \mathbb {R}\). Thus, we can extend \(\alpha \) a little, \(\alpha :(a-\epsilon ,b)\rightarrow \mathbb {R}\). But at a, \(\alpha '(a)=0\), and \(\alpha (a)=s_1\in (0,s_o)\). By the proof of Corollary 3.7, \(\alpha \) can be split in two inverse functions, one after a (which is the original \(f_{-}\)) and one before a, which we call \(f_{+}\). Now, it is quite clear that \(w_{+}={f}_{+}'>1\) provides an example of Case VII in Lemma 4.4. This means that the union of these two examples make a new type of translating soliton. This hypersurface is a (topological) sphere with two light-like-conic singularities, namely, asymptotic to two different light-like cones, one in the upper half and one in the lower half, with both vertices on the rotation axis. We will call it a fusiform hypersurface or a spindle. A similar symmetric reasoning holds if we start with an example of Case VII in Lemma 4.4, arriving to an example of Lemma 4.3.
Theorem 5.1
Up to isometries, any time-like, SO(n)-invariant translating soliton in \(\mathbb {L}^{n+1}\), \(n\ge 2\), is an open subset of either an Ogival Paraboloid, or a Timelike Calyx, or a Spindle.
The wing-like technique used in the previous theorem makes no sense for space-like hypersurfaces, because at some point, the hypersurfase would be parallel to the time-like rotation axis.
Remark 5.2
In [10], independently, the author obtained the space-like examples, obtaining three types. In Proposition 3.2, the profile curve of type 2 gives rise to the Bowl. However, from our point of view, the geometrical reconstruction of the two new surfaces can be slightly improved. Indeed, a profile curve of type 1 in Proposition 3.2 will hit the axis by a \(-\pi /4\) angle. However, if one tries to extend it beyond the axis, by rotating the curve, we must arrive again to one of the three cases of Proposition 3.2. But now, the angle will be \(\pi /4\), so this extension has to be a profile curve of type 3. This reasoning can be reversed, starting from a profile curve of type 3, and ending up with a profile curve of type 1. Moreover, the time-like examples were not considered in this paper.
Theorem 5.3
Up to isometries, any SO(n)-invariant, space-like, translating soliton in \(\mathbb {L}^{n+1}\), \(n\ge 2\), is an open subset of a hypersurface generated by the graph of any of the three cases in Lemma 4.2.
Similarly to the Euclidean case, we call the hypersurface generated by case I, the Bowl.
Corollary 5.4
The bowl is the only entire, SO(n)-invariant, graphical translating soliton in \(\mathbb {L}^{n+1}\), \(n\ge 2\), up to isometries.
The following pictures were made with wxMaxima© and Gnuplot© [6, 19].

Remark 5.5
Timelike translating solitons do not satisfy a tangency principle. Indeed, we consider two different spindles. At the points where the distance to the axis is maximal, the tangent planes contain directions parallel to the rotation axis. Due to the rotation action of \(SO(n-1)\), the study of the relative position of the hypersurfaces will reduce to the study of the curves from Corollary 3.7. We recall that the differential equation is
with initial conditions \(\alpha _i(y_0)=s_i\), \(\alpha '(y_0)=0\), for \(i=1,2\). We can assume \(0<s_1<s_2\). Then,
To compare their graphs, we use \(\beta =\alpha _1+\alpha _2(y_o)-\alpha _1(y_o)\). Clearly, \(\beta '=\alpha _1'\) and \(\beta ''=\alpha _1''\). But now, \(\beta (y_0)=\alpha _2(y_o)\), \(\beta '(y_o)=0=\alpha _2'(y_o)\) and \(\beta ''(y_o)<\alpha _2''(y_o)\). Therefore, \(\beta (y)<\alpha _2(y)\) holds for any \(y\ne y_o\) in a neighborhood of \(y_o\). Geometrically, this is the same as moving one of the spindles in such a way that their tangent planes coincide (parallel to the rotation axis), but one spindle is at one side of the other spindle.
6 The Action of the Group \(SO^{\uparrow }(n-1,1)\)
Let \(\mathbb {L}^{n}\), \(n\ge 2\), be the Minkowski (linear) space with the standard metric \(g(X,Y)=X_1Y_1+\cdots +X_{n-1}Y_{n-1}-X_nY_n\), \(X=(X_1,\ldots ,X_n)^t, Y=(Y_1,\ldots ,Y_n)^t\in \mathbb {L}^n\). We consider the important subgroup of linear isometries
where \(I_{n-1,1}=\mathrm {Diagonal}(1,\ldots ,1,-1)\), \(A^t\) is the transpose of A. The light cone \({\mathcal {C}}=\{p\in \mathbb {L}^n: g(p,p)=0\}\) can be split into the zero, the future part and the past part, \({\mathcal {C}}^{\uparrow }=\{p\in {\mathcal {C}} : p_n>0\}\), \({\mathcal {C}}^{\downarrow }=\{p\in {\mathcal {C}} : p_n<0\}.\) We call \({\mathbf {T}}^{\uparrow }\) the open subset of all future pointing time-like vectors, whereas \({\mathbf {T}}^{\downarrow }\) is the open subset of all past pointing time-like vectors. Let \({\mathcal {S}}\) be the open subset of all space-like vectors, which is connected when \(n\ge 3\), and it has two connected components when \(n=2\). Then, we have the disjoint union \(\mathbb {L}^n = \{0\}\cup {\mathcal {C}}^{\uparrow }\cup {\mathcal {C}}^{\downarrow }\cup {\mathbf {T}}^{\uparrow }\cup {\mathbf {T}}^{\downarrow }\cup {\mathcal {S}}\). Each of them are invariant by \(SO^{\uparrow }(n-1,1)\).
Firstly, we study the case \(n=2\). Take the Minkowski plane \(\mathbb {L}^2\) with standard flat metric \(g=\mathrm{{d}}x^2-\mathrm{{d}}y^2\). The Boost Lie group is the set of matrices
which acts on \(\mathbb {L}^2\) by isometries. If we remove the origin (0, 0), the action is free, but it is not proper, because the quotient space \((\mathbb {L}^2\backslash \{0\})/{\mathbf {B}}\) is not Haussdorf. Indeed, the light cone projects to four points if \(n=1\) which cannot be separated by neighbourhoods. We split the plane in four regions whose boundaries are made of two light-like geodesics, namely
We will use the globally defined orthonormal frame \(\{\partial _x,\partial _y\}\). The action of \({\mathbf {B}}\) works very well on each \(\Omega _k\), \(k=1,2,3,4\), because they admit decompositions as in (3.1) (see below). According to [3], first we will obtain the fundamental examples included in the fundamental regions \(\Omega _k\times \mathbb {R}\subset \mathbb {L}^3\), \(k=1,2,3,4\). In \(\Omega _1\cup \Omega _3\), the orbits of \({\mathbf {B}}\) are time-like. In \(\Omega _2\cup \Omega _4\), the orbits are space-like. When \(n=2\), \({\mathcal {S}}=\Omega _1\cup \Omega _3\), \({\mathbf {T}}^{\uparrow }=\Omega _2\), \({\mathbf {T}}^{\downarrow }=\Omega _4\).
We come back to the general case. To simplify computations and notations, we call \(\chi :\Omega \subset \mathbb {R}^k\rightarrow \mathbb {R}^k\) the position vector. Define the continuous map
Outside the light cone, \(\pi \) is smooth. Given \(x\in \mathbb {L}^n\backslash {\mathcal {C}}\), we put \(\tilde{\varepsilon }=\mathrm {sign}(g(x,x))\) \(=\pm 1\),
This projection can be restricted to \(\Omega _i\), \({\mathcal {S}}\), \({\mathbf {T}}^{\uparrow }\), \({\mathbf {T}}^{\downarrow }\), obtaining the necessary pseudo-Riemannian submersions onto \((0,+\infty )\). We explain the curves and diffeomorphisms of (3.1) in some cases, and the other ones are left to the reader.
\(\star \) Decomposition of \({\mathbf {T}}^{\uparrow }\). The curve is \(\beta :(0,+\infty )\rightarrow {\mathbf {T}}^{\uparrow }\), \(\beta (s)=(0,\ldots ,0,s)\), and the map is \(\phi :(0,+\infty )\times SO(n-1,1) \rightarrow {\mathcal {C}}^{\uparrow }\), \(\phi (s,A)=\beta (s)A\). Also, \(\tilde{\varepsilon }=-1\).
\(\star \) Decomposition of \({\mathcal {S}}\). The curve is now \(\beta :(0,+\infty )\rightarrow {\mathcal {S}}\), \(\beta (s)=(s,0,\ldots ,0)\), and the map is \(\phi :(0,+\infty )\times SO(n-1,1) \rightarrow {\mathcal {C}}^{\uparrow }\), \(\phi (s,A)=\beta (s)A\). Also, \(\tilde{\varepsilon }=+1\).
Remark 6.1
Given a domain (open and connected) \(\Omega \subset \mathbb {L}^n\backslash {\mathcal {C}}\), such that any of the above decompositions make sense, then \(\pi :\Omega \rightarrow (0,+\infty )\). By (6.1), function \(h:(0,+\infty )\rightarrow \mathbb {R}\) is \(h(s)=\tilde{\varepsilon }/s\).
It is important to remember that we are studying \(\mathbb {L}^{n+1}=\mathbb {L}^n\times \mathbb {R}\), so that \(\varepsilon '=+1\). Therefore, with our previous considerations, equation (3.3) reduces to
where \(\tilde{\varepsilon }\) depends of the type of the orbits of \(\mathbf{B }\), i.e. of the region we are considering
Example 3
Assume \(\tilde{\varepsilon }=1\), i.e. we consider solutions in the domain S. Then (3.3) becomes
This is the very same ODE as in the rotationally symmetric case in \(\mathbb {R}^{n+1}\). By [5], there are two types of solutions.
-
Type Z: Firstly, we recall the only solution \(f_1\) such that \(f_1(0)=0\) and \(f_1'(0)=0\). The translating soliton will be the corresponding graph
$$\begin{aligned} \Phi :\Omega \rightarrow \Omega \times \mathbb {R}\subset \mathbb {L}^{n+1}, \quad \Phi (x)=\big (x,f(\pi (x))\big ). \end{aligned}$$When \(n=2\), there will be two twin surfaces constructed like this, one in \(\Omega _1\) and one in \(\Omega _3\). For \(n\ge 3\), since \(\Omega ={\mathcal {S}}\) is connected, there is just one hypersurface.
-
Wing-like: Secondly, as in [5], (also, recall Corollary 3.7), there is a family of unextendable, space-like profile curves \(\alpha :\mathbb {R}\rightarrow \{(x,y,t)\in \mathbb {L}^3 : y=0, x>0 \}\). By denoting the \(3\times 3\) matrix \({\hat{A}}_{\theta }=\left( {\begin{matrix} A_{\theta } &{} 0 \\ 0 &{} 1 \end{matrix}}\right) \), the translating soliton is then
$$\begin{aligned} \Phi : \mathbb {R}^2\rightarrow \mathbb {L}^3, \quad \Phi (\theta ,s)=\alpha (s){\hat{A}}_{\theta }. \end{aligned}$$
Example 4
For \(\varepsilon '=1\) and \(\tilde{\varepsilon }=-1\), (3.3) becomes
By the easy change \(q(s)=-f(s)\), we transform this problem in
By Sect. 4, there are 7 types of solutions to this differential equation. Once we have a solution \((f=-q)\), we construct our profile curve and the associated translating soliton. As \(f'=-q'\), the solutions producing time-like translating solitons are those satisfying \(\vert f'(s)\vert <1\). So, for each solution as in Lemma 4.2, we construct a time-like translating soliton.
Example 5
The Hybrid Translator:
-
Case \(n=2\). We call \(f_1\) the solution to (6.2) in \(\mathbb {R}\), and \(f_2\) the solution to (6.4) in \(\mathbb {R}\) such that \(f_i(0)=0\) and \(f_i'(0)=0\), \(i=1,2\). Recall that they are even functions and analytical. As such, their derivatives of odd order are \(f_i^{(2k-1)}(0)=0\), \(k\ge 1\). As a result, \(f_1(s)=\sum _{k=1}^{\infty } \frac{f_1^{(2k)}(0)}{(2k)!}s^{2k}\). Then, it makes sense to define \({\hat{f}}:\mathbb {R}\rightarrow \mathbb {R}\), \({\hat{f}}(s)=f_1(is)\), where \(i=\sqrt{-1}\). By simple computations,
$$\begin{aligned} {\hat{f}}''(s) = - \big (1 - ({\hat{f}}'(s))^2 \big )\Big (1 + \frac{{\hat{f}}'(s)}{s}\Big ). \end{aligned}$$Hence, \({\hat{f}}\) is a solution to equation (6.4), and consequently \({\hat{f}}=f_2\). By comparing the derivatives of \(f_1\) and \(f_2\), \(f_1^{(k)}(0)=f_2^{(k)}(0)=0\), if k is odd, since \(f_1\) and \(f_2\) are even, and \(f_1^{(4k+2)}(0)=-f_2^{(4k+2)}(0)\) and \(f_1^{(4k)}(0)=f_2^{(4k)}(0)\) for all \(k\ge 0\). Next, we can define
$$\begin{aligned} u:\mathbb {R}^2\rightarrow \mathbb {R}, \quad u(x,y) = \left\{ \begin{array}{cl} f_1\left( \sqrt{x^2-y^2}\right) , &{} (x,y)\in \Omega _1\cup \Omega _3, \\ 0, &{} (x,y)\in \partial \Omega _i, i=1,2,3,4,\\ f_2\left( \sqrt{y^2-x^2}\right) , &{} (x,y)\in \Omega _2\cup \Omega _4. \end{array} \right. \end{aligned}$$
Note that we get immediately \(u\in C^0(\mathbb {R}^2)\cap C^{\infty }(\bigcup _{k=1}^4\Omega _k)\). We want to prove that \(u\in C^{\infty }(\mathbb {R}^2)\). To do so, we now just need to prove the following
Lemma 6.2
Let \(f_1\), \(f_2\) be functions in \(C^{2m}(\mathbb {R})\), such that \(f_1^{(k)}(0)=f_2^{(k)}(0)=0\), if k is odd, \(f_1^{(k)}(0)=(-1)^{\frac{k}{2}}f_2^{(k)}(0)\), if k is even. Then the function u defined as above is in \(C^{m}(\mathbb {R}^2)\).
Proof
We prove the statement by induction over m. The case \(m=0\) is trivially satisfied, since \(f_1(0)=f_2(0)\). Moreover let \(g_1(z)=\frac{f'_1(z)}{z}\), \(g_2(z)=\frac{f'_2(z)}{z}\). We have
Since \(f_1'(0)=f'_2(0)=0\), and \(g_1^{(4k+2)}(0)=-g_2^{(4k+2)}(0)\) and \(g_1^{(4k)}(0)=g_2^{(4k)}(0)\) for all \(k\ge 0\), obviously \(g_1, g_2\in C^{2m-2}\) . Then by the induction hypothesis, the function
is in \(C^{m-1}(\mathbb {R}^2)\). Hence \(\partial _xu\) and \(\partial _yu\) extend to \(C^{m-1}(\mathbb {R}^2)\), and finally \(u\in C^{m}(\mathbb {R}^2)\). \(\square \)
We point out that the curve joining each two adjacent pieces is a light-like straight line. Thus, it is possible to consider two or three contiguous pieces, and their gluing straight lines. We cannot consider the other straight half-lines, since the boundary would be light-like. In other words, we can choose to glue either two, three or four adjacent pieces, to obtain translating solitons.
-
Case \(n\ge 3\). \(\mathbb {L}^{n}\) is isometric to the Lorentzian product \(\mathbb {R}^{n-1}\times _{-1}\mathbb {R}\), \(n\ge 3\), with the standard metric as at the beginning of this section. If we call \(g_o\) the standard Riemannian metric on \(\mathbb {R}^{n-1}\), its norm is \(\Vert x\Vert =\sqrt{g_o(x,x)}\), for any \(x\in \mathbb {R}^{n-1}\). The function u of the Hybrid Translator can be easily extended to \(\mathbb {L}^n\) as follows:
$$\begin{aligned} {\tilde{u}}:\mathbb {R}^{n-1}\times _{-1}\mathbb {R}=\mathbb {L}^{n}\rightarrow \mathbb {L}^{n+1}, \quad (x,y)\mapsto {\tilde{u}}(x,y):=u(\Vert x\Vert , y). \end{aligned}$$There is no confusion if we also call its graph the Hybrid Translator.
In addition, take \(A\in SO^{\uparrow }(n-1,1)\), and decompose it as \(A=\left( {\begin{matrix} B &{} d^t \\ c &{} a \end{matrix}}\right) \) for suitable \(B\in {\mathcal {M}}_{n-1}(\mathbb {R})\), \(c,d\in \mathbb {R}^{n-1}\), \(a\in \mathbb {R}\). With this, given \((x,y)\in \mathbb {R}^{n-1}\times _{-1}\mathbb {R}=\mathbb {L}^{n}\), taking \((z,t)=(z,y)A\), then \(\Vert z\Vert ^2-t^2=\Vert x\Vert ^2-y^2\). This means that \({\tilde{u}}\) is invariant by \(SO^{\uparrow }(n-1,1)\).
Sprunk and Xiao [17], proved that any entire translating soliton in \(\mathbb {R}^3\) must be convex, but this is not the case for our hybrid example, because \(f_1f_2<0\).
Theorem 6.3
Let M be a \(SO^{\uparrow }(n-1,1)\) invariant, time-like, translating soliton in \(\mathbb {L}^{n+1}\), \(n\ge 2\). Then, up to isometries, M is an open subset of one of the following examples:
-
1.
A translating soliton of type Z or Wing-like.
-
2.
Given w any of the three types of solutions in Lemma 4.2, take \(f=-\int w\).
-
3.
The Hybrid Translator.
Proof
We will use Theorem 3.5. As we regard \(\mathbb {L}^{n+1}=\mathbb {L}^n\times \mathbb {R}\), we need \(\varepsilon '=+1\). Recall \(\mathbb {L}^n={\mathcal {C}}\cup {\mathcal {S}}\cup {\mathbf {T}}^{\uparrow }\cup {\mathcal {C}}^{\downarrow }\), and each subset is invariant by the action of \(SO^{\uparrow }(n-1,1)\) by isometries. Only on \({\mathcal {S}}\cup {\mathbf {T}}^{\uparrow }\cup {\mathcal {C}}^{\downarrow }\) the action is proper, and we can obtain decompositions as in (3.1). The value of \(\tilde{\varepsilon }\) depends on the chosen domain. The orbits of the action are well-known. First, one finds the lightcone. For \(n=2\), they are (Euclidean) hyperbolas. For \(n\ge 3\), they are hypersurfaces with non-zero constant sectional curvature (namely, real hyperbolic spaces for any \(n\ge 3\) and Anti-de Sitter spaces for \(n\ge 4\)).
-
For \({\mathbf {T}}^{\uparrow }\) (resp. \({\mathbf {T}}^{\downarrow }\)), the curve \(\beta :(0,+\infty )\rightarrow {\mathbf {T}}^{\uparrow }\), \(\beta (s)=(0,\ldots ,0,s)\) is time-like (resp. \(\beta (s)=(0,\ldots ,0,-s)\)). Then, \(\tilde{\varepsilon }=-1\) and therefore we recall Example 4, obtaining another 3 time-like translating solitons.
-
For \(\Omega ={\mathcal {S}}\), the curve \(\beta :(0,+\infty )\rightarrow {\mathcal {S}}\), \(\beta (s)=(s,0,\ldots ,0)\) is space-like. Then, \(\tilde{\varepsilon }=+1\). The differential equation (3.3) becomes
$$\begin{aligned} f''(s) = \big (1+f'(s)^2\big )\left( 1 -\frac{n-1}{s}f'(s)\right) . \end{aligned}$$(6.5)Now, we recall Examples 3. One should bear in mind that for \(n=2\), there will two twin surfaces, in \(\Omega _1\times \mathbb {R}\) and in \(\Omega _3\times \mathbb {R}\), since \({\mathcal {S}}\) is not connected.
-
It remains to study whether the solutions touching the lightcone can be extended smoothly. Since the lightcone has a degenerate metric, it has to be strictly contained in the hypersurface. In other words, we wonder if it is possible to glue two solutions, one in \({\mathbf {T}}^{\uparrow }\) and one in \({\mathcal {S}}\) (alternatively, in \({\mathbf {T}}^{\downarrow }\)). By regarding the extended action of \(SO^{\uparrow }(n-1,1)\) on \(\mathbb {L}^{n+1}\), if any, the tangent plane at the origing must be \(\{x\in \mathbb {L}^{n+1}=\mathbb {L}^n\times \mathbb {R}: x_{n+1}=0\}\). This means that the derivatives of the functions must be zero. Then, we finish the proof by recalling the Hybrid Translator. \(\square \)
By another method, in [10], the author obtained (essentially) the three space-like types, but not the time-like cases. Again, we also recover the following result from [10].
Theorem 6.4
Up to isometries, any \(SO^{\uparrow }(n-1,1)\) invariant, space-like, translating soliton in \(\mathbb {L}^{n+1}\), \(n\ge 2\), is an open subset of a hypersurface generated by the graph of any of Cases V, VI or VII in Lemma 4.4.
Remark 6.5
As in the proof of Theorem 5.1, Type IV from Lemma 4.3 and Type VII can be joined to provide a single profile curve.
Corollary 6.6
The only \(SO^{\uparrow }(n-1,1)\)-invariant, entire translating soliton in \(\mathbb {L}^{n+1}\), \(n\ge 2\), is the hybrid translator.
References
Alekseevsky, A.V., Alekseevsky, D.V.: Riemannian G-manifold with one-dimensional orbit space. Ann. Glob. Anal. Geom. 11, 197 (1993). https://doi.org/10.1007/BF00773366
Altschuler, S.J., Wu, L.F.: Translating surfaces of the non-parametric mean curvature flow with prescribed contact angle. Calc. Var. 2, 101 (1994). https://doi.org/10.1007/BF01234317
Barros, M., Caballero, M., Ortega, M.: Rotational surfaces in \(\mathbb{L}^n\) and solitons in the non-linear sigma model. Commun. Math. Phys. 290, 437–477 (2009)
Bueno, A.: Translating solitons of the mean curvature flow in the space \(\mathbb{H}^2\times \mathbb{R}\). J. Geom. 109, 42 (2018). https://doi.org/10.1007/s00022-018-0447-x
Clutterbuck, J., Schnürer, O.C., Schulze, F.: Stability of translating solutions to mean curvature flow. Calc. Var. 29, 281 (2007). https://doi.org/10.1007/s00526-006-0033-1
GnuPlot. http://www.gnuplot.info/
Huisken, G., Sinestrari, C.: Convexity estimates for mean curvature flow and singularities of mean convex surfaces. Acta Math. 183, 45–70 (1999)
Ilmanen, T.: Elliptic regularization and partial regularity for motion by mean curvature. Mem. Am. Math. Soc. 108, 520 (1994)
Jian, H., Liu, Q., Chen, X.: Convexity and symmetry of translating solitons in mean curvature flows. Chin. Ann. Math. 26B(3), 413–422 (2005). https://doi.org/10.1142/S0252959905000336
Kim, D.: Rotationally symmetric space-like translating solitons for the mean curvature flow in Minkowski space. J. Math. Anal. Appl. (2020). https://doi.org/10.1016/j.jmaa.2020.124086
Li, G., Tian, D., Wu, C.: Translating solitons of mean curvature flow of noncompact submanifolds. Math. Phys. Anal. Geom. 14, 83 (2011). https://doi.org/10.1007/s11040-011-9088-0
de Lira, J.H., Martín, F.: Translating solitons in Riemannian products. J. Differ. Equ. 266(12), 7780–7812 (2019). https://doi.org/10.1016/j.jde.2018.12.015
Martín, F., Savas-Halilaj, A., Smoczyk, K.: On the topology of translating solitons of the mean curvature flow. Calc. Var. 54, 2853 (2015). https://doi.org/10.1007/s00526-015-0886-2
O’Neill, B.: Semi-Riemannian Geometry. With Applications to Relativity Pure and Applied Mathematics, vol. 103. Academic Press Inc, New York (1983)
Pipoli, G.: Invariant translators of the solvable group. Ann. Mate. 199, 1961–1978 (2020). https://doi.org/10.1007/s10231-020-00951-0
Pipoli, G.: Invariant translators of the Heisenberg group. J. Geom. Anal. (2020). https://doi.org/10.1007/s12220-020-00476-1
Spruck, J., Xiao, L.: Complete translating solitons to the mean curvature flow in R3 with nonnegative mean curvature. Am. J. Math. 1–23 (2017). arXiv:1703.01003v2 (Forthcoming)
Wiggins, S.: Introduction to Applied Nonlinear Dynamical Systems and Chaos. Texts in Applied Mathematics, vol. 2, 2nd edn. Springer, New York (2003). (ISBN: 0-387-00177-8)
wxMaxima. http://maxima.sourceforge.net/
Acknowledgements
Ortega partially financed by: (1) the Spanish MICINN and ERDF, project PID2020-116126GB-I00; (2) the “Maria de Maeztu” Excellence Unit IMAG, ref. CEX2020-001105-M, funded by MCIN/AEI/10.13039/501100011033/; (3) Spanish FEDER-Andalucía grant PY20\(\_\)01391. Ortega also belongs to the Excellence Scientific Unit ’Science in the Alhambra’ of Granada University, ref. UCE-PP2018-01. Both authors would like to thank the London Mathematical Society and Imperial College London, since this was partially supported by a Scheme 4 Grant of the LMS.
Funding
Funding for open access charge: Universidad de Granada / CBUA. Funding was provided by Ministerio de Economía, Industria y Competitividad, Gobierno de España (ES) (MTM2016-78807-C2-1-P).
Author information
Authors and Affiliations
Corresponding author
Additional information
Dedicated to Prof. Manuel Barros on his retirement.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Lawn, MA., Ortega, M. Translating Solitons in a Lorentzian Setting, Submersions and Cohomogeneity One Actions. Mediterr. J. Math. 19, 102 (2022). https://doi.org/10.1007/s00009-022-02020-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00009-022-02020-7
Keywords
- Time-like translating soliton
- submersions
- pseudo-Riemannian manifolds
- Lie group
- cohomogeneity one action