
Abstract
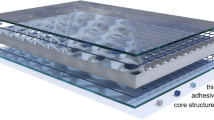
A construction method for an FDM printed floor slab system is proposed in this paper. The integration of translucent thermoplastics and additive manufacturing enables architects to develop self-explanatory tectonics that reflect the logic and construction processes. Lightweight, transparent thermoplastics such as PET and PLA can be used in 3D printing to create visual contrast to conventional solid materials. The additive manufacturing process can improve structural behavior by controlling the material distribution. Therefore, the proposed floor slab system pursues ‘light and strong’ via using a carefully planned toolpath for FDM printing. An entire floor is subdivided into prefabricated modular components, which are then assembled using the post-tensioning method to improve the integrity and tensile strength of the floor system. A toolpath is designed based on the internal stress of the components such that the material density reflects the structural behavior of the floor slab. The material efficiency is thereby achieved by the optimized articulation. In addition, we maximize the continuity of the printing path to enhance the printing quality and reduce the manufacturing time. This construction method is applied to the renovation of a group of industrial buildings. Prototyping experiments were carried out using translucent PLA to visualize the material distribution inside modules, manifesting the design principle of “form follows performance”.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The rapid development of digital fabrication technology in recent years has bridged the gap between computational design and material realization [1]. Among these emerging technologies, 3D printing is typically applied to the construction of irregular buildings or building components due to its capability of easily realizing free-form design [2, 3]. In addition, Fused Deposition Modelling (FDM) facilitates performance-based parametric designs by digitally materializing differentiated forms derived from optimization process [4, 5]. However, the traditional building materials, such as concrete, clay and sand, result in heavyweight building components that are difficult to either construct or demolish quickly. Therefore, a construction method for a FDM printed lightweight floor slab system is investigated in this study. The use of thermoplastic enables the floor slab system to be easily assembled and disassembled without damaging the original structure. What’s more, it provides strong visual contrast to traditional building materials and is thus suitable for the renovation of old buildings.
After completing the preliminary design scheme of the building space of a group of old factories, further research of the floor slab system is carried out. The design of this FDM printed slab can be divided into three processes: the design of the global geometry, engineering the material distribution and planning the printing toolpath [6]. After the geometry of the printed modules is determined, the layer pattern of the floor slab section is designed based on a stress analysis to adapt the density of the pattern to the stress of the floor slab, and the material distribution is thereby made consistent with the force flow to improve the structural performance and material efficiency. Then, based on the layer pattern, the toolpath of the FDM printer nozzle is carefully planned. Finally, translucent PLA is used in a construction experiment to visualize the internal structural logic of the floor slab system.
2 Background
This research applies additive manufacturing with lightweight composite to adaptive reuse of industrial buildings. Our approach refers to three areas: (1) the design context of factory renovation; (2) using post-tensioning method to assemble and reinforce the 3D printed thermoplastic modules; (3) the study of performance-based toolpath planning.
2.1 Design Context: Renovation of a Group of Factories
Rapid societal development has made many industrial buildings obsolete. However, these buildings have become an unintended memorial of sorts and should be given appropriate new uses. In addition, changes to the original structure need to be minimized during renovation, and the readability of the structure should be maintained [7].
In this study, four factory buildings are to be renovated. The main building structures are well preserved and the internal spaces are large. Horizontal components are used to connect the factories to strengthen the connection between different spaces. Some horizontal components extend into the factory to form floor slabs, while others are bent and transformed into stairs and walls (Fig. 1).

The design scheme (the pink sections are constructed by FDM).
2.2 Thermoplastic Modules and Post-Tensioning Method
Due to the weak mechanical properties of thermoplastic, measures should be taken to improve its structural performance when applied in architecture. The most common approach is using fiber reinforcement. Mohamed [8] infused carbon fiber into polymer to realize large format additive manufacturing. Kwon [9] constructed a set of building components using fiber-reinforced plastics. However, when assembling block printed floor slabs, fiber reinforcement cannot improve the global integrity of the floor slab. Therefore, post-tensioning method, which is more often applied to concrete now, is employed in this research.
2.3 Performance-Based Toolpath Planning
The Italian architect Pier Luigi Nervi advocated that the beauty of structure comes from the force flow, that is, the beauty of architecture emerges from the consistency between form and structure [10, 11]. Based on this point of view, Nervi created a series of architectural works in which the structural forms follow the force flow and create strong visual impact. However, the use of traditional construction methods typically produces a homogeneous distribution of building materials and architects can only shape the external form of building components. By contrast, FDM printing can control the distribution of materials at the microscopic scale through careful design of a printing toolpath to make the microstructure of the building components conform to the mechanical logic and force flow distribution.
Some researchers have explored the use of FDM to make the material distribution conform to force flow in furniture or building components [12, 13]. Retsin [14] designed the voxel chair, in which the distribution of a continuous plastic wire is controlled by designing the movement path of a robot arm to improve the stability of the chair. Luca et al. [15] printed concrete beams using a performance-based printing toolpath design to reduce material quantities. Tam et al. [6] proposed a new toolpath planning method, where the material is deposited along paths derived from principal stress lines of a shell structure.
3 Construction Method of Components
To align the new structure with the reserved structure of the old buildings, a 4 m * 6 m single-span column network is used for the floor slab system. Steel beams are arranged in the direction of the six-meter-long span to connect thin steel columns, such that the FDM printed floor slab only needs to cover a span of four meters in one direction. The research conducted by Liu et al. [16] shows that the tensile strength and compressive strength of 3D printed pure PLA specimens are 34.16 Mpa and 103.94 MPa, respectively. As PLA has poor tensile strength, steel cables are added to the floor slab system. A prestressed post-tensioning method is adopted to make the steel cables bear a portion of the tension induced in the floor slab system by the load (Fig. 2).

Beam-column system supporting the floor and post-tensioning cables inside the slab (the pink sections are prefabricated by FDM printing).

Comparison of different subdivision methods (the red dotted lines indicate the position of the post-tensioning cables)
As the FDM printer has a limited range, the floor slab needs to be divided into several small modules to be printed. The divided modules will be assembled on site to form the slab. Figure 3 is a comparison of different division methods for the prefabricated modules. The first is row-and-column division, which has poor integrity and stability because modules can easily rotate around the steel cable when under stress. The second and third methods stagger the modules in a single direction, which represents a slight improvement over the first method. However, displacement between modules still occurs easily. The last method is a herringbone division pattern that makes each module interlock with every other module in two directions and enhances the stability of the floor slab system. Therefore, we employed the herringbone division method.
4 3D-Printing Toolpath Planning
As the mechanical properties of PLA are relatively poor, the structural efficiency of the slab needs to be improved. Therefore, a force analysis of the slab is first carried out, and the internal material distribution of the floor slab is then carefully designed to reflect the structural logic of the slab. As a result, the weight of the slab is reduced and the structural strength is improved. Finally, the material distribution in the floor slab is converted into a continuous printing toolpath.
4.1 Stress-Based Geometry of Slab Sections
Due to the presence of steel beams, the floor slab only needs to cover a span of four meters in one direction, which can be regard as a combination of several simply supported side-by-side beams. Therefore, it is simplified as a simply supported beam first and Karamba for Grasshopper based on Finite Element Method [17, 18] is used to analyze the stress of the beam’s longitudinal section. In the analysis diagram presented in Fig. 4a, the layer pattern must be dense in the red section under compression to create high material concentration; as the reinforcing steel cables will pass through the blue section under tension, the layer pattern can be relatively sparse.
A gradually varying quadrilateral mesh is generated following the principles mentioned above (Fig. 4b). Then diagonal lines are added to convert the quadrilateral mesh into a triangular mesh (Fig. 4c) to enhance the stability of the structure. Finally, the blue parts are passed through by the steel cable (Fig. 4d).

Layer pattern of longitudinal section conditioned by structural analysis.
The mesh is generated as follow: the height H and width W of a given rectangle are divided into n1 and n2 line segments with lengths of h1, h2… hn1 and w1, w2… wn2, respectively. It is stipulated that hn and wn are equal difference series with tolerances of t1 and t2, respectively. The line segments are generated, and the end points are connected into a quadrilateral mesh, which is converted into a triangular mesh by adding diagonal lines. The parameters n1, n2, t1 and t2 are adjusted to change the length of the line segments, and the shape of the mesh can be thus transformed until its density is consistent with the structural analysis.
4.2 Differentiate the Geometry at Different Sections
The cross section with the layer pattern shown in Fig. 4 is placed parallel to the printing plane, however, applying the layer pattern in Fig. 4 directly to the printing path of every layer in the module will create a constant material distribution in different layers in the floor slab, which does not conform to the actual force flow and thus wastes materials. Therefore, the density of the layer pattern needs to be differentiated in each layer through parametric adjustment.

The layer patterns are arranged in descending order with distance from the steel cable.
The sections close to the steel cable are under a similar stress to the “beam” in the thick slab and bear a higher stress than the sections in the floor slab system that are distant from the steel cable. Therefore, the layer pattern of the slab section should gradually become sparser with the increasement of the distance between the section and the steel cable to improve the material efficiency. The mesh generation process described in Sect. 4.1 can be used to vary the density of this layer pattern by adjusting the parameters n1 and n2 (the number of line segments formed by dividing the edges of the respective rectangle). The layer patterns with different densities obtained by adjusting n1 and n2 are arranged in descending order according to their distance from the steel cable, such that the density of the layer pattern increases with its serial number (Fig. 5). A channel is designed within the No. 11 pattern for the passage of the post-tensioning steel cable.
In this study, FDM printing based on fused deposition modeling (FDM) technology was employed. FDM technology is a computer-aided process that creates objects through layered deposition of fused material extruded by a nozzle installed on a digitally controlled motion system [19]. As the action of gravity precludes suspending the filament in air, support is required under each layer to prevent the upper filament from collapsing and affecting the final printing quality; Besides, there is also a limitation in the maximum angle of overhang parts [20, 21]. The sudden change in the number of line segments between two adjacent layer patterns (Fig. 5) results in a dramatic shift in the position of the line segments and therefore leads to the suspension of the upper layer filaments. Therefore, after one pattern is printed for a certain number of layers, it is not possible to directly switch to the next pattern. Instead, a transitional pattern between two patterns must be carefully planned so that the printing path does not suddenly change or suspended in air.
The following algorithm is used to generate a transitional pattern. Given a sequence an of length n, a sequence bn of length n + 1, and the number m of transitional sequences required between an and bn, the matrix Cmn can be obtained:
The number sequence of the digits in the ith row of the matrix Cmn is the length of the line segment into which the edges of the rectangle in the transitional pattern of the ith layer are divided. Layered deposition of the layer patterns and the intervening transitional patterns is shown in Fig. 6.

Layered deposition of the gradually varying layer patterns.
4.3 From Geometry to 3D-Printing Toolpath
The layer patterns generated above should be translated into a G-code file, which contains the information required for the FDM printing process, such as the coordinate of each point that the nozzle passes through, the quantity of material extruded between each pair of points, and the travel speed of the nozzle [22]. The procedure presented in Sect. 4.2 determines the coordinate of each point that the nozzle passes through. Next, these points are arranged in sequence. The distance between each pair of adjacent points is used to calculate the quantity of material extruded.
To improve printing quality and reduce printing time, the movement trajectory of the FDM printer nozzle should be drawn with as few strokes as possible to reduce repetition and interruption of the toolpath [23]. According to Euler's theorem [24], the necessary and sufficient condition that a connected undirected graph can be drawn by one stroke is that there are only zero or two odd vertices (vertices with an odd number of connected edges) in the graph. Figure 7 shows two typical layer patterns generated in this study: there are four odd vertices in the left graph and only two in the right graph. Therefore, part of the printing toolpath needs to be repeated in the left pattern, whereas the right pattern can be drawn in one stroke.

Printing toolpaths for two typical layer patterns.
4.4 Five Prototypes of Modules
Using the herringbone division method presented in Fig. 3 to combine the generated layer patterns results in fourteen prefabricated modules (Fig. 8), and the modules are assembled by the post-tensioning method to improve the integrity and tensile strength of the slab. The fourteen modules can be divided into five categories, among which the maximum module size is 2.6 m * 1.5 m * 0.24 m. Although the second and third modules, as well as the fourth and fifth modules, appear similar, both pairs of modules differ in terms of the position at which the steel beam passes through and the shape of the channel created for the prestressed steel cables. These five kinds of modules can also be used at other locations as the individual spans of the floor slab system are under similar stress conditions.

The post-tensioning assembly consists of the five types of modules.

The slab system used in industrial building renovation.
Figure 9 shows the visual effect of using the floor slab system in the industrial building renovation project mentioned in Sect. 2.1. The translucent new part enables light to pass through the lightweight floor slab, creating a strong visual contrast to the concrete and brick of the old factories, such that people can distinguish between the building materials and construction methods of different ages.
5 Fabrication Experiments
Models of 1:25 and 1:8 scale are fabricated in the laboratory. The filament sizes produced by the FDM printer should maintain the proportions of actual filaments to simulate the real printing path and the density of the layer pattern. The FDM printer in actual fabrication process produces a PLA filament width of approximately 10 mm and an individual layer height of approximately 5 mm. Therefore, the width and height of the filaments in the 1:25 and 1:8 models should float at approximately 0.4 mm * 0.2 mm and 1.25 mm * 0.625 mm, respectively.
5.1 FDM Printing the 1: 25 Scale Model
In the FDM printing experiment at the 1:25 scale, repeated printing of each layer pattern shown in Fig. 5 causes sudden changes of the positions of some line segments in the printing path. However, the filaments produced using this ratio are extremely thin, which results in a very small partial sag deformation and therefore no discernible quality problems for the FDM printed products. The five kinds of prefabricated modules shown in Fig. 10 were printed and assembled according to the herringbone division method to yield the floor slab over two spans (Fig. 10a). Thin iron wires are used instead of steel cables to connect the modules in this experiment. Figure 10b shows the perspective below the floor slab system. As translucent PLA is used to print these modules, the material distribution and the position of the steel cables inside the floor slab can be seen clearly. In high-stress regions of the floor slab, the materials are densely distributed, reducing the floor transparency, while the floor slab is more transparent in low-stress regions, which increases the readability of the structural logic of the floor slab system.

FDM printed 1:25 scale modules assembled with iron wires.
5.2 FDM Printing the 1: 8 Scale Model
The filaments produced by the FDM printer are thicker in this scale, so sudden changes in the printing paths of two adjacent layers result in prominent deformation of unsupported suspended filaments in the upper layer, which severely affects the printing quality. Therefore, FDM printing under 1:8 scale must be performed with the transitional patterns shown in Fig. 6.
The results of a series of tests show the maximum angle of overhang per layer is approximately forty degrees, beyond which the shape of the printed objects tends to deteriorate. Consequently, this information is incorporated into the program as one of the limitations encountered while adjusting the design parameters. The aspect ratio of the filaments also impacts the printing quality. With broader width and smaller thickness, the filaments on the same layer can easily stack together, which makes the surface of the printed products uneven and leads to longer printing time. On the contrary, PLA filaments with a smaller width and larger thickness decrease the number of printing layers because the height of the desired modules remains unchanged, but it may result in an overhang angle per layer exceeding forty degrees. The results of repeated tests show that the best printing quality tends to be obtained for filaments with a height and width of 1.2 mm and 0.75 mm, respectively.

FDM printed 1:8 scale module.
Figure 11 shows the modules printed in this experiment, within which the material distribution and steel cable can still be seen clearly. Compared to the modules printed without using the transitional pattern in the 1:25 FDM printing experiment, there are some slight changes in the vein on the surface of the 1:8 modules, but the overall material distribution trend remains the same.
6 Conclusion
Many architects have long pursued the goal of capturing the beauty of structures synchronized with the force flow and materials used. The development of digital fabrication enables the use of additive manufacturing to extend realization of this goal from the scale of buildings and building components to the scale of material, whereby architects can design the internal microstructure and material distribution of building components, such as beams and floor slabs. The integration of translucent composite and additive manufacturing helps architects to develop self-explanatory tectonics which reflects the logic and construction process. This integration generates feedback between design and construction processes, which are simultaneously enhanced.
A lightweight floor slab system is designed based on FDM printing for use in an industrial building renovation project. The floor slab is divided into small modules for 3D printing, and the prefabricated modules are assembled with prestressed post-tensioning steel cables. To make the internal microstructure of the modules conform to the force flow, the advantages of 3D printing in controlling material distribution over traditional construction methods are exploited.
In this study, the layer pattern of cross-section of the floor slab is generated based on stress analysis, and the other layer patterns of different cross-sections are then adjusted according to the force flow. Therefore, the floor slab system demonstrates the interconnection between the building scale and the material scale. Translucent PLA is used in 3D printing experiments at different scales, revealing the internal structure attributed to the force flow within the floor slab. The use of lightweight materials enables the slab to be easily assembled and disassembled in a short time and has little impact on the original structures, suitable for adaptive use of industrial buildings.
In addition, there are still some future works to be done. Larger scale models (1:1 or 1:2) should be constructed and load tests will be carried out to evaluate the structural performance of the demonstrator.
References
Yuan, F., Chai, H., Xie, Y.: Towards a structural performance-based architectural design in digital age. Archit. J. 1 (11) (2017)
Ethz Digital Building Technologies Homepage: https://dbt.arch.ethz.ch/proje-ct/3d-printed-reinforced-beam/. Accessed 30 Jul 2022
Peters, B.: Building Bytes: 3D-Printed Bricks. Fabricate (2014)
Meibodi, M., Jipa, A. et al.: Smart Slab: Computational Design and Digital Fabrication of a Lightweight Concrete Slab. In: Proceedings of the 38th Annual Conference of the Association for Computer Aided Design in Architecture (2018)
minimass Homepage https://www.minimass.net/. Accessed 30 Jul 2022
Tam, K.-M.M., Mueller, C.: Additive manufacturing along principal stress lines. 3D Printing and Additive Manufacturing 4 (2017)
Jiang, N.: Post-adaptive-reuse evaluation of modern architectural heritages based on three typical cases in Nanjing. Archit. J. 1 (2017)
Mohamed, H., Bao, D.W., Snooks, R.: Super composite: carbon fibre infused 3D printed tectonics. In: Proceedings of the 2020 DigitalFUTURES (2020)
Kwon, H., Eichenhofer, M., Kyttas ,T. et al.: Digital composites: robotic 3D printing of continuous carbon fiber-reinforced plastics for functionally-graded building components. In: Robotic Fabrication in Architecture, Art and Design (2019)
Chen, Z.: Defining and shaping space through convergence and transmission: P. L Nervi’s classicality and modernity. In: Time+ Architecture 1 (2022)
Nervi, P.: Aesthetics and Technology in Building. Harvard University Press, Cambridge, MA (1965)
Wu, H., Li, Z., Zhou, X. et al.: Digital design and fabrication of a 3D concrete printed funicular spatial structure. In: Proceedings of the 27th annual conference for Computer-Aided Architectural Design Research in Asia (CAADRIA) (2022)
Bhooshan, S., Bhooshan, V., Dell’Endice, A. et al.: The Striatus bridge: computational design and robotic fabrication of an unreinforced, 3D-concrete-printed, masonry arch bridge. Archit. Struct. Construct. 2 (2022)
Soler, V., Retsin, G.: A generalized approach to non-layered fused filament fabrication. In: Proceedings of the 37th annual conference of the Association for Computer Aided Design in Architecture (ACADIA) (2017)
Breseghello, L., Naboni, R.: Toolpath-based design for 3D concrete printing of carbon-efficient architectural structures. Addit. Manuf. 56 (2022)
Liu, X., Dillon, L., James, F., et al.: Analysis of mechanical properties of 3D printing PLA specimens reinforced by carbon fiber. Plastics 3 (2017)
Preisinger C. Karamba 3D: www.karamba3d.com/. Accessed 30 Jul 2022
Preisinger, C., Heimrath, M.: Karamba—a toolkit for parametric structural design. Struct. Eng. Int. 24 (2014)
Paolini, A., Kollmannsberger, S., Rank, E.: Additive manufacturing in construction: A review on processes, applications, and digital planning methods. Addit. Manuf. 30 (2019)
Leary, M., Merli, L., Torti, F., et al.: Optimal topology for additive manufacture: a method for enabling additive manufacture of support-free optimal structures. Mater. Des. 63 (2014)
Bablani, M., Bagchi, A.: Quantification of errors in rapid prototyping processes, and determination of preferred orientation of parts. In: Transactions of the 23rd North American Manufacturing Research Conference (2015)
reprap Homepage: https://reprap.org/wiki/G-code. Accessed 30 Jul 2022
Jin, G.: An adaptive process planning approach of additive manufacturing and manufacturing. Robot Comput. Integr. Manuf. 29 (2013)
Newman, J.R.: The World of Mathematics. Simon and Schuster Press, New York (1956)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this paper

Cite this paper
Liu, Y., Hua, H. (2024). Translucent Tectonics: Lightweight Floor Slab System Based on FDM Manufacturing. In: Yan, C., Chai, H., Sun, T., Yuan, P.F. (eds) Phygital Intelligence. CDRF 2023. Computational Design and Robotic Fabrication. Springer, Singapore. https://doi.org/10.1007/978-981-99-8405-3_42
Download citation
DOI: https://doi.org/10.1007/978-981-99-8405-3_42
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-8404-6
Online ISBN: 978-981-99-8405-3
eBook Packages: EngineeringEngineering (R0)