
Abstract
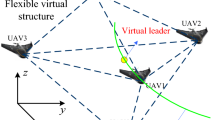
This paper mainly studies the delay-based feedback formation control problem with feedforward components for multiple unmanned aerial vehicles (UAVs) system. First, the kinematic equation of the leader-follower UAVs formation system with regard to three directions is established, and the communication network topology between UAVs is presented. Second, by intentionally introducing time-delay into feedback control channel, a delay-based feedback formation control scheme with feedforward components is proposed for the multiple UAVs system. The sufficient conditions of asymptotical stability of closed-loop system are derived based on the linear matrix inequality (LMI) theory, and the design method of the delayed formation controller is presented. The effectiveness of this control scheme is verified based on simulation results, which show that under the designed formation controller, the formation performance of the multiple UAVs system can be guaranteed effectively.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Lydie, G., et al.: Validation of a new UAV magnetic prospecting tool for volcano monitoring and geohazard assessment. Remote Sens. 13, 1–10 (2021). https://doi.org/10.3390/rs13050894
Ding, M.L., Ding, C.B., Tang, L., Wang, X.M., Qu, J.M., Wu, R.: A W-Band 3-D integrated mini-SAR system with high imaging resolution on UAV platform. IEEE Access. 8, 113601–113609 (2020). https://doi.org/10.1109/ACCESS.2020.3003273
Mu\(\widetilde{n}\)oz, J., L\(\acute{o}\)pez, B., Quevedo, F., Monje, C.A., Garrido, S., Moreno, L.E.: Multi UAV coverage path planning in urban environments. Sensors. 21, 21 (2021). https://doi.org/10.3390/s21217365
Mohammad, M.J., Matthias, W.: Applications and research avenues for drone-based models in logistics: a classification and review. Expert Syst. Appl. 177 (2021). https://doi.org/10.1016/j.eswa.2021.114854
Chen, J., Xiao, K., You, K., Qing, X., Ye, F., Sun, Q.: Hierarchical task assignment strategy for heterogeneous multi-UAV system in large-scale search and rescue scenarios. Int. J. Aerosp. Eng. 2021(2021). https://doi.org/10.1155/2021/7353697
Dehghani, M.A., Menhaj, M.B.: Communication free leader-follower formation control of unmanned aircraft systems. Robot. Auton. Syst. 80, 69–75 (2016). https://doi.org/10.1016/j.robot.2016.03.008
Tan, G., Zhuang, J.Y., Zou, J., Wan, L.: Coordination control for multiple unmanned surface vehicles using hybrid behavior-based method. Ocean Eng. 232 (2021). https://doi.org/10.1016/j.oceaneng.2021.109147
Bolandi, H., Moradi Pari, H., Izadi, M.R.: Multiple spacecraft formation and station-keeping control in presence of static attitude constraint via decentralized virtual structure approach. J. Aerosp. Eng. 35 (2022). https://doi.org/10.1061/(ASCE)AS.1943-5525.0001347
Pan, Z.H., Zhang, C.X., Xia, Y.Q., Xiong, H., Shao, X.D.: An improved artificial potential field method for path planning and formation control of the multi-UAV systems. IEEE Trans. Circuits Syst. II Exp. Briefs. 69, 1129–1133 (2022). https://doi.org/10.1109/TCSII.2021.3112787
Ali, Z.A., Israr, A., Alkhammash, E.H., Hadjouni, M.: A leader-follower formation control of multi-UAVs via an adaptive hybrid controller. Complexity 2021 (2021). https://doi.org/10.1155/2021/9231636
Gonz\(\acute{a}\)lez, A., Aranda, M., L\(\acute{o}\)pez-Nicol\(\acute{a}\)s, G., Sag\(\ddot{u}\acute{e}\)s, C.: Robust stability analysis of formation control in local frames under time-varying delays and actuator faults. J. Franklin Inst. 356, 1131–1153 (2019). https://doi.org/10.1016/j.jfranklin.2018.06.020
Jia, R., Zong, X.F.: Time-varying formation control of linear multiagent systems with time delays and multiplicative noises. Int. J. Robust Nonlinear Control. 31, 9008–9025 (2021). https://doi.org/10.1002/rnc.5754
Du, Y., Cao, W.H., She, J.H., Wu, M., Fang, M.X., Kawata, S.: Disturbance rejection for input-delay system using observer-predictor-based output feedback control. IEEE Trans. Industr. Inform. 16, 4489–4497 (2020). https://doi.org/10.1109/TII.2019.2947431
Aryankia, K., Selmic, R.R.: Neuro-adaptive formation control and target tracking for nonlinear multi-agent systems with time-delay. IEEE Contr. Syst. Lett. 5, 791–796 (2021). https://doi.org/10.1109/LCSYS.2020.3006187
Steinberger, M., Horn, M., Ferrara, A.: Adaptive control of multivariable networked systems with uncertain time delays. IEEE Trans. Automat. Contr. 67, 489–496 (2022). https://doi.org/10.1109/TAC.2021.3083563
Wang, M., Zhang, T.: Leader-following formation control of second-order nonlinear systems with time-varying communication delay. Int. J. Control Autom. Syst. 19(5), 1729–1739 (2021). https://doi.org/10.1007/s12555-019-0759-0
Gonz\(\acute{a}\)lez, A., Arag\(\ddot{u}\)\(\acute{e}\)s, R., L\(\acute{o}\)pez-Nicol\(\acute{a}\)s, G., Sag\(\ddot{u}\)\(\acute{e}\)s, C.: Predictor-feedback synthesis in coordinate-free formation control under time-varying delays. Automatica. 113 (2020). https://doi.org/10.1016/j.automatica.2020.108811
Wang, Y., Cheng, Z.S., M., X.: UAVs’ formation keeping control based on multi-agent system consensus. IEEE Access. 8, 49000–49012 (2020). https://doi.org/10.1109/ACCESS.2020.2979996
Zhang, B.-L., Cai, Z., Gao, S.-W., Tang, G.-Y.: Delayed proportional-integral control for offshore steel jacket platforms. J. Franklin Inst. 356, 6373–6387 (2019). https://doi.org/10.1016/j.jfranklin.2019.03.030
Oh, K.-K., Park, M.-C., Ahn, H.-S.: A survey of multi-agent formation control. Automatica. 53, 424–440 (2015). https://doi.org/10.1016/j.automatica.2014.10.022
Liu, Y., Bucknall, R.: A survey of formation control and motion planning of multiple unmanned vehicles. Robotica. 36, 1019–1047 (2018). https://doi.org/10.1017/S0263574718000218
Do, H.T., et al.: Formation control algorithms for multiple-UAVs: a comprehensive survey. EAI. Endorsed Trans. Ind. Netw. Intell. Syst. 8, 1–13 (2021). https://doi.org/10.4108/eai.10-6-2021.170230
Shehzad, K.M., Su, H., Tang, G.-Y., Zhang, B.-L.: Model decomposition-based optimal formation control for multiple unmanned aerial vehicles. Trans. Inst. Meas. Control. 44, 952–959 (2022). https://doi.org/10.1177/01423312211043012
Acknowledgements
This work was supported by the National Key R & D Program of China under Grant 2018AAA0100804.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Wang, L., Zhao, YD., Zhang, BL., Cai, Z., Xue, J., Zhao, Y. (2023). Delay-Based Feedback Formation Control for Unmanned Aerial Vehicles with Feedforward Components. In: Yan, L., Duan, H., Deng, Y. (eds) Advances in Guidance, Navigation and Control. ICGNC 2022. Lecture Notes in Electrical Engineering, vol 845. Springer, Singapore. https://doi.org/10.1007/978-981-19-6613-2_660
Download citation
DOI: https://doi.org/10.1007/978-981-19-6613-2_660
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-6612-5
Online ISBN: 978-981-19-6613-2
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)