
Abstract
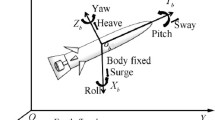
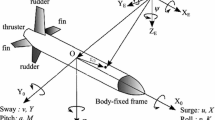
The basics of the feedback control structure and its applicability subject to modelling, control, disturbance rejection, noise suppression techniques are addressed in this paper through a motion control problem of a linearized decoupled speed subsystem model of an autonomous underwater vehicle (AUV). AUV is chosen because vehicle dynamics are highly coupled, time-varying, nonlinear and in reality, its operating environment is highly uncertain in nature. The design of two control schemes is proposed to achieve the control objectives and controller performance. A superiority of proposed control performance is presented and verified through simulation results.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Stefani, R.T., Shahian, B., Savant, C.J., Hostetter, G.H.: Design of Feedback Control Systems, 4th edn. Oxford University Press, Oxford (2002)
Franklin, G.F., Powell, J.D., Emami-Naeini, A.: Feedback Control of Dynamics Systems, 7th edn. Pearson Education, Inc., Boston (2015)
Ogata, K.: Modern Control Engineering, 5th edn. Pearson Education, Inc., Boston (2010)
Nise, N.S.: Control System Engineering, 7th edn. Wiley, Hoboken (2015)
Chen, C.T.: Linear System Theory and Design, 3rd edn. Oxford University Press, Oxford (1999)
Astrom, K.J., Murray, R.M.: Feedback Systems an Introduction for Scientists and Engineers, 2nd edn. Princeton University Press, Princeton (2019)
Paraskevopoulos, P.N.: Modern Control Engineering. Control Engineering Series. Marcel, Dekker, Inc., New York (2002)
Simon, D.: Optimal State Estimation Kalman, H\(\infty \), and Nonlinear Approaches. Wiley, Hoboken (2006)
Boyd, S., Barratt, C.: Linear Controller Design: Limits of Performance. Pearson Education, Inc., Boston (1991)
Wang, L.: PID Control System Design and Automatic Tuning Using MATLAB/Simulink. Wiley-IEEE Press (2020)
Doyle, J., Francis, B., Tannenbaum, A.: Feedback Control Theory. Macmillan Publishing Co. (1990)
Xue, D., Chen, Y.: Modeling, Analysis and Design of Control Systems in Matlab and Simulink. World Scientific Publishing Co. Pte. Ltd., Singapore (2015)
Fossen, T.I., Pettersen, K.Y.: Guidance and Control of Ocean Vehicles. Wiley, Hoboken (1994)
Healey, A.J., Lienard, D.: Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles. IEEE J. Oceanic Eng. 18(3), 327–339 (1993)
Wilman, A.P.M., Alain, G.S., Spartacus, G.C.: The predictive functional control and the management of constraints in GUANAY II autonomous underwater vehicle actuators. IEEE Access 6, 22353–22367 (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Desai, R.P., Manjarekar, N.S. (2022). Ubiquitous Control Structure and It’s Comprehensive Application Subject to Controller Performance. In: Mekhilef, S., Shaw, R.N., Siano, P. (eds) Innovations in Electrical and Electronic Engineering. ICEEE 2022. Lecture Notes in Electrical Engineering, vol 894. Springer, Singapore. https://doi.org/10.1007/978-981-19-1677-9_16
Download citation
DOI: https://doi.org/10.1007/978-981-19-1677-9_16
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-1676-2
Online ISBN: 978-981-19-1677-9
eBook Packages: EnergyEnergy (R0)