
Abstract
This note presents an overview of the modeling and control strategies on vehicle platooning of road vehicles and focuses specifically on the modeling and control strategies. In general, independent (simplified) vehicle models are related and coupled only through the control laws. The control problem is then studied and several strategies are considered (local, global and mixed) in literature.
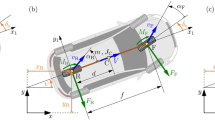
The modeling approach that we prefer is the one of robotics considering the geometric, the kinematic and the dynamic models. Several models exist in literature [1,2,3,4]. The use of nonlinear robust approaches gives a better controllability of the fleet and more robust behavior against uncertainties and modeling errors.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Polack P, d’Andréa Novel B, De La Fortelle A, Menhour L (2016) Cohérence entre la modélisation et les objectifs de contrôle pour les véhicules autonomes. In: 20ème Congrès national sur la Reconnaissance des Formes et l’Intelligence Artificielle (RFIA 2016), Clermont-Ferrand, France, June 2016. https://hal-mines-paristech.archives-ouvertes.fr/hal-01473160
Guillet A, Lenain R, Thuilot B, Martinet P (2014) Adaptable robot formation control: adaptive and predictive formation control of autonomous vehicles. IEEE Rob Autom Mag 21(1):28–39
M’Sirdi NK (2018) Vehicle platooning: an overview on modelling and control approaches. In: International conference on applied smart systems (ICASS 2018), Medea University
Nouveliere L, Marie JS, Mammar S, M’Sirdi NK (2002) Controle longitudinal de véhicules parcommande sous optimale. In: CIFA 2002, Nantes Juillet, pp 906–911
Ali A, Garcia G, Martinet P (2015) Urban platooning using a flatbed tow truck model. In: Intelligent vehicles symposium (IV). IEEE, pp 374–379
Avanzini P (2010) Modélisation et commande d’un convoi de véhicules urbains par vision. Ph.D. dissertation, Université Blaise Pascal-Clermont-Ferrand II
Yazbeck J (2014) Accrochage immatériel sûr et précis de véhicules automatiques. Ph.D. dissertation, Université de Lorraine
Figueiredo L, Jesus I, Machado JAT, Ferreira JR, de Carvalho JLM (2001) Towards the development of intelligent transportation systems. In: ITSC 2001, 2001 IEEE intelligent transportation systems. Proceedings (Cat. No.01TH8585), pp 1206–1211
Tomizuka M (1997) Automated highway systems - an intelligent transportation system for the next century. In: Proceedings of IEEE/ASME international conference on advanced intelligent mechatronics, June 1997, p 1
Binding C, Gantenbein D, Jansen B, Sundström O, Bach Andersen P, Marra F, Poulsen B, Træholt C (2010) Electric vehicle fleet integration in the danish edison project - a virtual power plant on the island of bornholm. In: IEEE PES general meeting, pp 1–8
Enkelmann W (2003) Fleetnet - applications for inter-vehicle communication. In: IEEE IV2003 intelligent vehicles symposium. Proceedings (Cat. No. 03TH8683), pp 162–167
Swaroop D (1994) String stability of interconnected systems: an application to platooning in AHS. Ph.D. dissertation, University of California at Berkeley (1994)
Yanakiev D, Kanellakopoulos I (1996) A simplified framework for stringstability analysis in AHS1. IFAC Proc Vol 29(1):7873–7878
Mu’azu JM, Sudin S, Mohamed Z, Yusuf A, Usman AD, Hassan AU (2017) An improved topology model for two-vehicle look-ahead and rear-vehicle convoy control. In: IEEE 3rd international conference on electro-technology for national development (NIGERCON), vol 6
Contet JM, Gechter F, Gruer P, Koukam A (2009) Bending virtual spring-damper: a solution to improve local platoon control. In: International conference on computational science. Springer, pp 601–610
Avanzini P, Thuilot B, Martinet P (2010) Accurate platoon control of urban vehicles, based solely on monocular vision. In: 2010 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, pp 6077–6082
Xiang J, Bräunl T (2010) String formations of multiple vehicles viapursuit strategy. IET Control Theory Appl 4(6):1027–1038
Ricardo C, Aguiar AP, Gaspar J (2008) Control of unicycle type robots tracking, path following and point stabilization. In: Proceedings of IV Jornadas de Engenharia Electrónica e Telecomunicações e de Computadores. Lisbon Portugal, pp 180–185
Martinez JJ, Avila JC, de Wit CC (2004) A new bicycle vehicle model with dynamic contact friction. IFAC Proc Vol 37(22):625–630. iFAC Symposium on Advances in Automotive Control 2004, Salerno, Italy, 19–23 April 2004. http://www.sciencedirect.com/science/article/pii/S1474667017304135
Sprinkle J, Eklund JM, Gonzalez H, Grotli E, Sanketi P, Moser M (2008) Recovering models of a four-wheel vehicle using vehicular system data. EECS Department, University of California, Berkeley, Technical report, UCB/EECS-2008-92, August 2008. http://www2.eecs.berkeley.edu/Pubs/TechRpts/2008/EECS-2008-92.html
Daviet P, Parent M (1996) Longitudinal and lateral servoing of vehicles in a platoon. In: Intelligent vehicles symposium, proceedings of the1996 IEEE. IEEE, pp 41–46
Khatir ME, Davidson E (2005) Decentralized control of a large platoon of vehicles operating on a plane with steering dynamics. In: Proceedings of the american control conference. IEEE, pp 2159–2165
Bascetta L, Cucci DA, Matteucci M (2016) Kinematic trajectory tracking controller for an all-terrain ackermann steering vehicle. IFAC-PapersOnLine 49(15):13–18. 9th IFAC Symposium on Intelligent Autonomous Vehicles IAV 2016. http://www.sciencedirect.com/science/article/pii/S2405896316308606
Zin A, Sename O, Dugard L (2004) Luca bascetta and davide a. cucci and matteo matteucci. IFAC ProceedingsLuca Bascetta and Davide A. Cucci and Matteo Matteucci lumes 37(22):619–624. iFAC Symposium on Advances in Automotive Control 2004, Salerno, Italy, 19–23 April 2004. http://www.sciencedirect.com/science/article/pii/S1474667017304123
Song L, Guo H, Wang F, Liu J, Chen H (2017) Model predictive control oriented shared steering control for intelligent vehicles. In: 29th Chinese Control and decision conference (CCDC). IEEE, pp 7568–7573
Huang C, Naghdy F, Du H (2016) Model predictive control based lane change control system for an autonomous vehicle. In: Region 10 conference (TENCON) 2016 IEEE. IEEE, pp 3349–3354
Rabhi A (2005) Estimation de la dynamique du véhicule en interaction avec son environnement. Ph.D. dissertation, Versailles-St Quentin en Yvelines
DeSantis R (1995) Path-tracking for car-like robots with single and doublesteering. IEEE Trans Veh Tech 44(2):366–377
Chebly A (2017) Trajectory planning and tracking for autonomous vehicles navigation. Ph.D. dissertation, Université de Technologie de Compiègne
Cartade P, Lenain R, Thuilot B, Berducat M (2012) Algorithmes pour la commande d’une formation de robots mobiles. In: Conférence Internationale Francophone d’Automatique (CIFA2012) Grenoble, France. 4–6 Juillet 2012. IEEE, pp 2159–2165
Lenain R (2005) Contribution à la modélisation et à la commande de robots mobiles en présence de glissement: application au suivi de trajectoire pour les engins agricoles. Ph.D. dissertation, Université Blaise Pascal-Clermont-Ferrand II
Cordesses L (2000) Commande de robots holonomes et non holonomes. application au guidage d’engins agricoles par gps. Ph.D. dissertation, Université Blaise Pascal - Clermont II
Petrov P (2009) Nonlinear adaptive control of a two-vehicle convoy. OpenCybernetics Syst J 3:70–78
Caicedo, R.E., Valasek, J., Junkins, J.L.: Preliminary results of one-dimensional vehicle formation control using a structural analogy. In: Proceedings of the American Control Conference, 2003, vol. 6, pp. 4687–4692. IEEE (2003)
M’Sirdi, N.K., Rabhi, A., Naamane, A.: Vehicle models and estimation of contact forces and tire road friction. In: ICINCO 2007, Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, Robotics and Automation 1, Angers, France, 9–12 May 2007, pp. 351–358 (2007)
Qian, X., de La Fortelle, F.A.A., Moutarde, F.: A distributed model predictive control framework for road-following formation control of car-like vehicles. arXiv:1605.00026v1 [cs.RO] 29 April 2016 (2016)
Sheikholeslam, S., Desoer, C.A.: Longitudinal control of a platoon of vehicles with no communication of lead vehicle information: A system level study. IEEE Trans. Veh. Technol. 42(4), 546–554 (1993)
Nadji, M.: Adequation de la dynamique de vehicule a la geometrie des virages routiers: apport a la securitere. Ph.D. thesis, Villeurbanne, INSA 2007
Acknowledgment
Many thanks to the ICEERE committee for the invitation to give this invited conference, namely Hajji Bekkai and Abdelhamid Rahi. I would like to thank also the colleagues and friends who interested by this point of vues gave suggestions.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
M’Sirdi, N.K. (2021). Autonomous Vehicle Platooning and Motion Control. In: Hajji, B., Mellit, A., Marco Tina, G., Rabhi, A., Launay, J., Naimi, S. (eds) Proceedings of the 2nd International Conference on Electronic Engineering and Renewable Energy Systems. ICEERE 2020. Lecture Notes in Electrical Engineering, vol 681. Springer, Singapore. https://doi.org/10.1007/978-981-15-6259-4_1
Download citation
DOI: https://doi.org/10.1007/978-981-15-6259-4_1
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-6258-7
Online ISBN: 978-981-15-6259-4
eBook Packages: EnergyEnergy (R0)