
Abstract
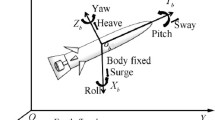
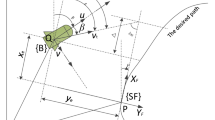
Micro autonomous underwater vehicle (µAUV) design and developed at Underwater, Control and Robotics Group (UCRG) is a torpedo-shaped vehicle measuring only 0.72 m in length and 0.11 in diameter with a mass of approximately 6 kg. This paper proposed a time invariant tracking control method for underactuated micro AUV in horizontal plane using robust filter approach to track a predefined trajectory. Tracking error is introduced which can then be converged by using force in surge direction and moment in yaw direction. A robust control will minimize the effects of external disturbance and parameter uncertainties on the AUV performance. With only rigid-body system inertia matrix information of the micro AUV, robustness against parameter uncertainties, model nonlinearities, and unexpected external disturbance is achievable with the proposed controller. Performance of the proposed robust tracking control is demonstrated in simulation results.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Wahed MA, Arshad MR (2019) Modeling of Torpedo-Shaped Micro Autonomous Underwater Vehicle. Springer, Singapore
Shtessel Y, Edwards C, Fridman L, Levant A (2014) Sliding Mode Control and Observation. Springer, New York
Guo J, Chiu FC, Huang CC (2003) Design of a sliding mode fuzzy controller for the guidance and control of an autonomous underwater vehicle. Ocean Eng 30(16):2137–2155
Hoang NQ, Kreuzer E (2008) A robust adaptive sliding mode controller for remotely operated vehicles. Tech Mech 28(3–4):185–193
Deng CN, Ge T (2013) Depth and heading control of a two DOF underwater system using a model-free high order sliding controller with transient process. In: Proceedings of 2013 5th International Conference on Measuring Technology and Mechatronics Automation, ICMTMA 2013, pp 423–426
García-Valdovinos LG, Salgado-Jiménez T, Bandala-Sánchez M, Nava-Balanzar L, Hernández-Alvarado R, Cruz-Ledesma JA (2014) Modelling, design and robust control of a remotely operated underwater vehicle. Int J Adv Robot Syst 11(1):1–16
Prasanth Kumar R, Dasgupta A, Kumar CS (2007) Robust trajectory control of underwater vehicles using time delay control law. Ocean Eng 34(5–6):842–849
Park JY, Cho BH, Lee JK (2009) Trajectory-tracking control of underwater inspection robot for nuclear reactor internals using Time Delay Control. Nucl Eng Des 239(11):2543–2550
Zhong YS (2002) Robust output tracking control of SISO plants with multiple operating points and with parametric and unstructured uncertainties. Int J Control 75(4):219–241
Gilbert S, Varghese E (2017) Design and simulation of robust filter for tracking control of quadcopter system. In: 2017 International Conference on Circuit, Power and Computing Technologies, ICCPCT, Kollam, pp 1–7
Yu Y, Zhong YS (2008) Robust tracking control for a 3DOF helicopter with multi-operation points. In: Proceedings 27th Chinese Control Conference, CCC, pp 733–737
Song YS, Arshad MR (2016) Tracking control design for autonomous underwater vehicle using robust filter approach. In: Autonomous Underwater Vehicles 2016, AUV 2016, pp 374–380
Acknowledgements
The authors would like to thank RUI grant (Grant no.: 1001/PELECT/8014088) and Universiti Sains Malaysia for supporting the research.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Wahed, M.A.B.A., Arshad, M.R. (2021). Tracking Control Design for Underactuated Micro Autonomous Underwater Vehicle in Horizontal Plane Using Robust Filter Approach. In: Md Zain, Z., et al. Proceedings of the 11th National Technical Seminar on Unmanned System Technology 2019 . NUSYS 2019. Lecture Notes in Electrical Engineering, vol 666. Springer, Singapore. https://doi.org/10.1007/978-981-15-5281-6_1
Download citation
DOI: https://doi.org/10.1007/978-981-15-5281-6_1
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-5280-9
Online ISBN: 978-981-15-5281-6
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)