
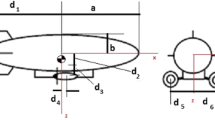
Abstract
The studies of swarm of unmanned aerial vehicles (UAVs) have been increasing, and swarm of UAVs can become part of many daily tasks. But, as matter of fact, even the use of a UAV does not mean the decreasing of operational complexities and, consequently, the costs of performing its tasks, because of high costs of trained operators and remote control facilities to operate state-of-the-art UAVs. So, in order to support the operation of swarm, this work proposes a parallel/distributed framework to control mission of each UAV. These unmanned crafts will less dependent on remote control facilities. Embedding the mission control running in an embedded parallel/distributed computer system will be able to carry on basic mission control tasks. In order to prove this concept, the following items were developed: (i) a prototype of an embedded parallel/distributed computer cluster using low-cost components; (ii) new procedures to resolve navigation and collision evasion issues; and (iii) a parallel/distributed path discover program. The tests carried out in the embedded parallel/distributed computer cluster prototype and with new evasion procedures proved the viability of proposed framework.
Similar content being viewed by others

References
Defense Industry Daily staff: JLENS: Coordinating Cruise Missile Defense – And More, 30 December 2012. http://www.defenseindustrydaily.com/jlens-coordinating-cruise-missile-defense-and-more-02921/ (2012)
Corporation, A.P.: Aerial Products, 28 December 2012. http://www.aerialproducts.com/surveillance-systems/aerial-surveillance.html (2008)
Dadkhah, N., Korukanti, V.R., Kong, Z., Mettler, B.: Experimental demonstration of an online trajectory optimization scheme using approximate spatial value functions. In: Proceedings of the 48th IEEE Conference on Decision and Control, pp. 2978–2983 (2009)
Saiki, H., Fukao, T., Urakubo, T., Khno, T.: Hovering control of outdoor blimp robots based on path following. In: 2010 IEEE International Conference on Control Applications (CCA), pp. 2124–2129 (2010)
Mettler, B., Kong, Z.: Receding horizon trajectory optimization with a finite-state value function approximation. In: Proceeding of 2008 American Control Conference, Seattle, Washington, pp. 3810–3816 (2008)
González, P., Burgard, W., Sanz, R., Fernadez, J.L.: Developing a low-cost autonomous indoor blimp. J. Phys. Agents 3(1), 43–51 (2009)
Fukao, T., et al.: Inverse optimal velocity field control of an outdoor blimp robot. In: Proceedings of the 17th World Congress the International Federation of Automatic Control, Seoul, Korea, pp. 4374–4379 (2008)
Rottmann, A., Plagemann, C., Hilgers, P., Burgard, W.: Autonomous blimp control using model-free reinforcement learning in a continuous state and action space. In: Proceeding of International Conference on Intelligent Robots and Systems, IROS 2007, pp. 1895–1900 (2007)
Gammon, S.M., Fryr, M.T., Qian, C.: The mathematical model of the tri-turbofan airship for autonomous formation control research. In: IEEE Region 5 Technical, Professional, and Student Conference, San Antonio, Texas (2006)
Azinheira, J.R., et al.: Visual servo control for the hovering of an outdoor robotic airship. In: Proceedings of the 2002 IEEE International Conference on Robotics & Automation, Washington, DC, pp. 2787–2792 (2002)
Machry, C.R.: As Potencialidades de Emprego dos Dirigíveis no Transporte de Carga. Reista da UNIFA (2003)
Navarro, I., Matía, F.: An introduction to swarm robotics. ISRN Robot. 2013, Article ID 608164. http://dx.doi.org/10.5402/2013/608164 (2013)
Fossen, T.I.: Guidance and Control of Ocean Vehicles. Wiley, West Susses, England (1994)
Hardkernel Co., Ltd.: Products, 24 January 2013. http://www.hardkernel.com/renewal_2011/products/prdt_info.php (2013)
Ribeiro, C.G., et al.: A platform for autonomous path control of unmanned airship. J. Braz. Soc. Mech. Sci. Eng. (2017). https://doi.org/10.1007/s40430-017-0891-9. ISSN 1678-5878, Rio de Janeiro, Brazil
Becker, D.J., Sterling, T.: Beowulf: a parallel workstation for scientific computation. In: Proceedings of the International Conference on Parallel Processing (1995)
ARDUINO: Arduino, 25 March 2013. http://www.arduino.cc/ (2013)
Fossen, T.I.: Marine control systems, guidance, navigation, and control of ships, rigs and underwater vehicles. In: Marine Cybernetics, Trondheim, Norway (2002). ISBN 82-92356-00-2
Reschke, C., Sterling, T., Ridge, D.: A design study of alternative network topologies for the Beowulf parallel workstations. In: Proceedings of the IEEE International Symposium on High Performance Distributed Computing (1996)
Ralph, N.: Odroid-x development board brings quad-core Exynos 4 Quad processor to budding Android hackers for $129, 24 January 2013. http://www.theverge.com/2012/7/13/3156032/odroid-x-development-board-exynos-4412-quad (2012)
Larabel, M.: Quad-Core ODROID-X Battles NVIDIA Tegra 3, 24 January 2013. http://www.phoronix.com/scan.php?page=article&item=samsung_odroidx&num=1 (2012)
redOrbit Staff & Wire Reports - Your Universe Online: Miniature Quad-Core Computer For Under $130, 24 January 2013. http://www.redorbit.com/news/technology/1112656695/miniature-quad-core-computer-for-under-130/ (2012)
Lidar USA 3D Documentation and Beyond: Lidar USA 3D Documentation and Beyond. http://www.lidarusa.com/page.php?cat=3, 7 July 2013 (15 de December de 2013)
Texas Instruments: LIDAR System Design for Automotive/Industrial/Military Applications, SIGNAL PATH designer SM. Tips, tricks, and techniques from the analog signal-path experts Texas Instruments, Literature Number: SNAA 123 (2013)
i Badia, S.B., Pyk, P., Verschure, P.F.: A biologically inspired flight control system for a blimp-based UAV. In: Proceedings of the 2005 IEEE International Conference on Robotics and Automation, pp. 3053–3059 (2005)
U.S. Department of Homeland Security: NAVIGATION RULES ONLINE, 24 January 2013. http://www.navcen.uscg.gov/?pageName=navRulesContent (2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Ribeiro, C.G., Raptopoulos, L.S.C., Dutra, M.S. (2020). An Autonomous Airship Swarm for Maritime Patrol. In: Rocha, Á., Pereira, R. (eds) Developments and Advances in Defense and Security. Smart Innovation, Systems and Technologies, vol 152. Springer, Singapore. https://doi.org/10.1007/978-981-13-9155-2_25
Download citation
DOI: https://doi.org/10.1007/978-981-13-9155-2_25
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-9154-5
Online ISBN: 978-981-13-9155-2
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)