
Abstract
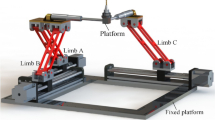
This paper presents a 4-DOF (3T1R: three-translational and one rotational degrees of freedom) parallel mechanism with passive spherical joints, which has better stiffness than the other ones with just prismatic and revolute joints. Firstly, structure description is given. And a complete study regarding motion characteristics is done by analytical method. Then the kinematics of the 4-DOF parallel manipulator, which includes inverse and forward solutions, is studied in detail by numerical method. The Jacobian matrix of the parallel manipulator is also derived. Based on the Jacobian matrix, singularity analysis of the parallel mechanism has been described clearly. All prismatic actuators of the 4-DOF parallel manipulator are parallel to each other, enables it to have an independent Z motion—only limited by the stroke of the prismatic actuators. So the parallel manipulator has the identical performance along the direction of the actuated linear slides. The 4-DOF parallel manipulator is characterized by elevated dynamical capabilities having its actuators at base.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Yi L, Shi Y, Huang Z, Jianping Y, Li S, Tian X (2009) Kinematics/ statics of a 4-DOF over-constrained parallel manipulator with 3 legs. Mech Mach Theory 44:1479–1506
Shayya S, Krut S, Company O, Baradat C, Pierrot F (2013) A Novel (3T-1R) redundant parallel mechanism with large operational workspace and rotational capability. In: 2013 IEEE/RSJ international conference on intelligent robots and systems (IROS), Tokyo, Japan, 3–7 Nov 2013
Kong X, Gosselin CM (2004) Type synthesis of 3T1R 4-DOF parallel manipulators based on screw theory. IEEE Trans Robot Autom 20(2):181–190
Li QC, Huang Z (2003) Type synthesis of 4-DOF parallel manipulators. In: Proceedings of the 2003 IEEE international conference on robotics and automation, Taipei, Taiwan, Sept 2003, pp 755–560
Kim SM, Kim W, Yi B-J (2009) Kinematic analysis and design of a new 3T1R 4-DOF parallel mechanism with rotational pitch motion. In: 2009 IEEE/RSJ international conference on intelligent robots and systems (IROS), St. Louis, USA, 11–15 Oct 2009
Kong X (2016) Reconfiguration analysis of a 4-DOF 3-RER parallel manipulator with equilateral triangular base and moving platform. Mech Mach Theory 98:180–189
Pierrot F, Company O (1999) H4: a new family of 4-dof parallel robots. In: Proceedings of the IEEE/ASME international conference on advanced intelligent mechatronics, Atlanta, USA, 1999, pp 508–513
Krut S, Company O, Benoit M, Ota H, Pierrot F (2003) I4: a new parallel mechanism for Scara motions. In: Proceedings of the 2003 international conference on robotics and automation, Taipei, Taiwan, Sept 2003, pp 1875–1880
Nabat V, Company O, Krut S, Rodriguez M, Pierrot F (2005) Par4: very high speed parallel robot for pick-and-place. In: Proceedings of the IEEE international conference on intelligent robots and systems (IROS’05), Edmonton, Alberta, Canada, Aug 2005
Pierrot F, Nabat V, Company O, Krut S (2008) From Par4 to Adept Quattro. In: Proceedings of the robotic systems for handling and assembly—3rd international colloquium of the collaborative research center SFB 562, Braunschweig, Germany, 2008
Guo S, Fang Y, Qu H (2012) Type synthesis of 4-DOF nonoverconstrained parallel mechanisms based on screw theory. Robotica 30:31–37
Acknowledgments
This work is financially supported by the National Natural Science Foundation of China (51275243).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Nature Singapore Pte Ltd.
About this paper
Cite this paper
Peng, B., Zhen, W., Wang, X., He, K., FU, S. (2017). Kinematics and Singularity of a 4-DOF Parallel Mechanism with Passive Spherical Joints. In: Zhang, X., Wang, N., Huang, Y. (eds) Mechanism and Machine Science . ASIAN MMS CCMMS 2016 2016. Lecture Notes in Electrical Engineering, vol 408. Springer, Singapore. https://doi.org/10.1007/978-981-10-2875-5_67
Download citation
DOI: https://doi.org/10.1007/978-981-10-2875-5_67
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-2874-8
Online ISBN: 978-981-10-2875-5
eBook Packages: EngineeringEngineering (R0)