
Abstract
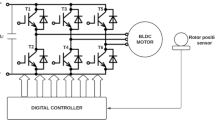
This paper deals with the development of a propulsion system for a robotic vehicle using a permanent magnet Brushless DC (BLDC) motor with sensorless commutated drive. The proposed vehicle has four BLDC motor driven wheels, each having separate sensorless drive circuitry but all controlled by a single supervisory controller. The vehicle is capable of performing angular and linear displacements, ruled by a distantly located operator. A drive/break by-wire technology is utilized for operation of the wheels. In this work, a real time system with sensorless commutation is designed and implemented that utilizes a three phase inverter, a microcontroller and a motor speed feedback as drive circuitry. A suitable cost effective algorithm has also been developed to generate an appropriate six transistor switching sequence to commute the BLDC motor. The characteristics of the implemented drive give satisfactory outputs over a wide range of controlled speed variation from 330 to 2440 rpm. The effectiveness of the system so designed is demonstrated through the real time experimental data.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
A. Tashakori, Member IAENG, M. Ektesabi, Member IAENG and N. Hosseinzadeh, “Modeling of BLDC Motor with Ideal Back-EMF for Automotive Applications”, Proceedings of the World Congress on Engineering 2011 Vol II, WCE 2011, July 6–8, 2011, London, U.K.
Debjyoti Chowdhury, Madhurima Chattopadhyay and Priyanka Roy, “Modelling and Simulation of Cost Effective Sensorless Drive for Brushless DC Motor”, International Conference on Computational Intelligence: Modelling, Techniques and Applications (CIMTA-2013), Procedia Technology 10 (2013), pp. 279–286.
Sharda Jaiswal, Debjyoti Chowdhury and Madhurima Chattopadhyay. “Performance Analysis of Sensored and Sensorless Drive of BLDC Motor Using Different Typs of DC/DC Converters In MATLAB/Simulink Platform”, Proceedings of ITR International Conference, 06th April-2014, Bhubaneswar, ISBN: 978-93-84209-02-5.
M. Caccia, R. Bono, G. Bruzzone and G. Veruggio, “Bottom-following for remotely operated vehicles”, Control Engineering Practice 11 (2003), pp. 461–470.
Behzad A and Rostami Alireza, “A novel starting method for BLDC motors without the position sensors”, Energy Conversion Management 2009; 50(2):337–43.
Debjyoti Chowdhury and Madhurima Chattopadhyay, “Modeling and Real Time Implementation of Wireless Remote Controlled Vehicle”, Second National Conference on Instrumentation and Control, 2013, pp 33.
S.A.K.H. Mozaffari Niapour, M. Tabarraie and M.R. Feyzi, “A new robust speed-sensorless control strategy for high-performance brushless DC motor drives with reduced torque ripple”, Control Engineering Practice 24(2014)42–54.
Acarnley PP and Watson JF, “Review of position sensorless operation of brushless permanent-magnet machines”, IEEE Trans. Ind.Electron 2006; 53(2):352–62.
Lai YS and Lin YK, “A new cost effective sensorless commutation method for brushless DC motors without using phase shift circuit and neutral voltage”, IEEE Trans Power Electron 2007; 22(2):644–53.
Santanu Mondal, Arunabha Mitra, Debjyoti Chowdhury and Madhurima Chattopadhyay, “A New Approach of Sensorless Control Methodology for Achieving Ideal Characteristics of Brushless DC Motor Using MATLAB/Simulink”, International Conference on Computer, Communication, Control and Information Technology (C3IT), February 2015, pp. 31.
R. A. Gupta, Rajesh Kumar and Ajay Kumar Bansal, “Artificial intelligence applications in Permanent Magnet Brushless DC motor drives”, Published online: 25 December 2009 © Springer Science + Business Media B.V. 2009.
C. Canudas de Wit, “Trends in mobile robot and vehicle control”, in Control Problems in Robotics, B. Siciliano and K. P. Valavanis, Eds. London, U.K.: Springer-Verlag, 1998, pp. 151–176. Lecture Notes in Control and Information Sciences 230.
M. Andersson, A. Orebäck, M. Lindström, and H. I. Christensen, “Intelligent Sensor Based Robotics”, Heidelberg, Germany: Springer-Verlag, 1999. Ch. ISR: An Intelligent Service Robot, Lecture Notes in Artificial Intelligence.
Damodharan P, Sandeep R and Vasudevan K, “Simple position sensorless starting method for brushless DC motor”, IEE Proc. Electro. Power Appl. 2008; 2(1):49–55.
Alireza R and Asaei Behzad, “A novel method for estimating the initial rotor position of PM motors without the position sensor”, Energy Convers Manage 2009; 50(8):1879–83.
Shao JW, Nolan D and Hopkins T, “Improved direct back EMF detection sensorless brushless DC (BLDC) motor drives for automotive fuel pumps”, IEEE Trans. Ind. Appl. 2003; 39(6):1734–40.
Jiang Q and C. Hung “A new phase-delay-free method to detect back EMF zero crossing points for sensorless control of spindle motors”, IEEE Trans. Magn. 2005; 41(7):2287–94.
Chokri Abdelmoula, Fakher Chaari and Mohamed Masmoudi, “A New Design of a Robot Prototype for Intelligent Navigation and Parallel Parking”, Journal of Automation, Mobile Robotics & Intelligent Systems, 2009, Volume 3, No. 2.
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Science+Business Media Singapore
About this paper
Cite this paper
Debjyoti Chowdhury, Arunabha Mitra, Santanu Mondal, Madhurima Chattopadhyay (2017). A New Implementation Scheme in Robotic Vehicle Propulsion Using Brushless DC Motor. In: Mandal, J., Satapathy, S., Sanyal, M., Bhateja, V. (eds) Proceedings of the First International Conference on Intelligent Computing and Communication. Advances in Intelligent Systems and Computing, vol 458. Springer, Singapore. https://doi.org/10.1007/978-981-10-2035-3_39
Download citation
DOI: https://doi.org/10.1007/978-981-10-2035-3_39
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-2034-6
Online ISBN: 978-981-10-2035-3
eBook Packages: EngineeringEngineering (R0)