
Abstract
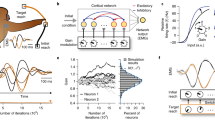
Dynamic movement primitives are one of key concepts for understanding dexterous and flexible movements of biological bodies. In the field of robotics engineering, simple types of nonlinear differential equations are used to generate movement primitives from demonstrations, but it remains unclear how nonlinear dynamics in the real brain can also generate movement primitives in biologically natural ways. The aim of this study is to investigate a possible role of nonlinear dynamics in random recurrent neural networks (RNNs) for skillful motor learning. We show that one-shot temporal patterns such arm reaching movements can be trained by a type of RNN-learning so-called FORCE-learning recently proposed by Sussillo and Abbott and a number of patterns are summarized as a manifold embedded in a space of synaptic weights of readout neurons. We also discuss how generalization of learning against untrained motor patterns can be achieved by identifying nonlinear coordinates (meta-parameters) on this manifold in a higher level of the central nervous system.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
N. Bernstein, The Coordination and regulation of movements, Pergamon, 1967.
A.J. Ijspeert, J. Nakanishi and S. Schaal, Learning Attractor Landscapes for Learning Motor Primitives, In: Advances in neural information processing systems, 1523 (2002).
I. Tsuda, Toward an Interpretation of Dynamic Neural Activity in terms of Chaotic Dynamical Systems, Behavioral and Brain Sciences 24, 793 (2001).
H. Sompolinsky, A. Crisanti and H.J. Sommers, Chaos in Random Neural Networks, Physical Review Letters 61, 259 (1988).
H. Jaeger, W. Maass and J. Principe, Special Issue on Echo State Networks and Liquid State Machines, Neural Networks 20 287 (2007).
D. Sussillo and L.F. Abbott, Generating Coherent Patterns of Activity from Chaotic Neural Networks, Neuron 63, 544 (2009).
T.D. Sanger, Optimal Unsupervised Learning in a Single-layer Linear Feedforward Neural Network, Neural networks 2, 459 (1989).
T. Flash and N. Hogan, The Coordination of Arm Movements: An Experimentally Confirmed Mathematical Model, The Journal of Neuroscience 5, 1688 (1985).
E. Todorov and W. Li, A Generalized Iterative LQG Method for Locally-optimal Feedback Control of Constrained Nonlinear Stochastic Systems, In: American Control Conference, Proceedings of the 2005 IEEE, 300 (2005).
Acknowledgements
We would like to thank I. Tsuda, S. Akaho and Y. Sakaguchi for fruitful discussions. We also thank D. Rodriguez for preparing arm reaching movements data. This study is partially supported by Grant-in-Aid for Scientific Research (No. 24120713), MEXT, Japan.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer Science+Business Media Dordrecht
About this paper
Cite this paper
Suetani, H. (2015). Geometry of Dynamic Movement Primitives in Neural Space: A FORCE-Learning Approach. In: Liljenström, H. (eds) Advances in Cognitive Neurodynamics (IV). Advances in Cognitive Neurodynamics. Springer, Dordrecht. https://doi.org/10.1007/978-94-017-9548-7_37
Download citation
DOI: https://doi.org/10.1007/978-94-017-9548-7_37
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-017-9547-0
Online ISBN: 978-94-017-9548-7
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)