
Abstract
The challenges for sensors and their correlated perception algorithms for driverless vehicles are tremendous. They have to provide more comprehensively than ever before a model of the complete static and dynamic surroundings of the ego-vehicle to understand the correlation of both with reference to the ego-vehicle’s movement. For dynamic objects, this means that radar has to provide the dimension and complete motion state as well as the class information, in highway, rural, and inner city scenarios. For the static world, new algorithm schemes have to be developed to enhance the shape representation of an object by image like semantics. In order to generate the necessary information, radar networking for 360° coverage have to be reinvented. Radar data processing toolchains have to be revolutionized by applying artificial intelligence and advanced signal processing in a synergetic manner.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
References
Daimler AG: Collision prevention assist. https://www.mercedes-benz.com/de/mercedes-benz/innovation/mit-abstand-am-besten-assistenzsysteme-von-mercedes-benz/. Zugegriffen: 26 Februar 2018
Daimler AG: Mercedes-Benz-Intelligent-Drive. https://www.mercedes-benz.com/en/mercedes-benz/innovation/mercedes-benz-intelligent-drive/. Zugegriffen: 26 Februar 2018
Daimler AG: Bertha-Benz Drive. http://media.daimler.com/marsMediaSite/de/instance/ko/Pionierleistung-Autonome-Langstreckenfahrt-im-Ueberland–und-Stadtverkehr-Mercedes-Benz-S-Klasse-INTELLIGENT-DRIVE-faehrt-autonom-auf-den-Spuren-von-Bertha-Benz.xhtml?oid=9904223. Zugegriffen: 26 Februar 2018
Dickmann, J., Appenrodt, N., Brenk, C.: Bertha fährt autonom. In: Automobil Elektronik, pp. 44–47, March 2014
Dickmann, J., Appenrodt, N., Klappstein, J., Bloecher, H.L., Muntzinger, M., Sailer, A., Hahn, M., Brenk, C.: Making Bertha see even ore: radar contribution. IEEE Access 3, 1233–1247 (2015)
Dickmann, J., Appenrodt, N., Brenk, C.: Making Bertha See. In: IEEE Spectrum, pp. 40–46, August 2014
Waymo: Waymo sensor suite. https://cdn-images1.medium.com/max/1600/1*9RQQY5ehTW5dYAhwdU4Pdg.jpeg. Zugegriffen: 26 Februar 2018
Uber: Self-Driving-Uber-Vehicles-San-Francisco. http://www.rideshareconnection.com/self-driving-uber-vehicles-san-francisco/. Zugegriffen: 26 Februar 2018
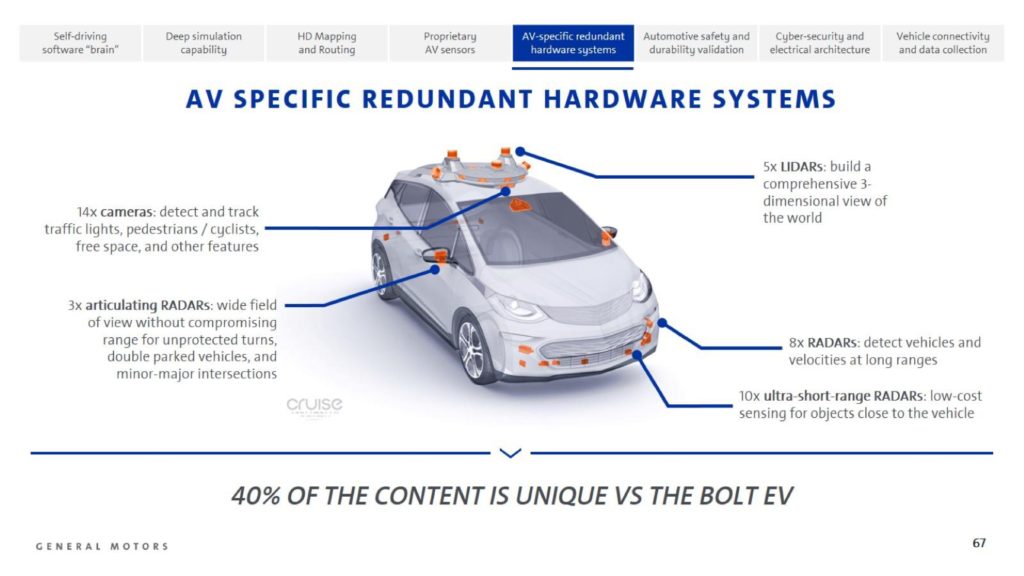
General Motors: General motors sensor suite. http://www.repairerdrivennews.com/wp-content/uploads/2017/12/general-motors-av-autonomous-sensors57-2-1024x576.jpg. Zugegriffen: 26 Februar 2018
Dickmann, J.: Automotive radar and radar based perception for driver-less cars. In: Ben Gurion University Radar Symposium. Ben-Gurion University of the Negev, Israel (2017)
Dickmann, J.: When will we give up driving our cars? A radar developers point of view. In: ISSCC, San Francisco (2017)
Dickmann, J.: Automotive radar systems at daimler: past-present-future. In: IEEE Radar Conference, Enabling Technologies for Advances in Radar, Philadelphia (2016)
McCloskey, D.: Radars as a complementary sensor for autonomous driving at Waymo. In: 14th European Radar Conference on EURAD-Workshop: Future Automotive Radar Systems, Nurenberg (2017)
Wyholt, A.: Scalability of sensor systems for active safety and autonomous functions. In: International VDI Conference – Automotive Sensor Systems, München (2018)
Lombacher, J., Hahn, M., Dickmann, J., Wöhler, C.: Detection of arbitrarily rotated parked cars based on radar sensors. In: 16th International Radar Symposium (IRS) (2015)
Lombacher, J., Hahn, M., Dickmann, J., Wöhler, C.: Object classification in radar using ensemble methods. In: IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM) (2017)
Lombacher, J., Hahn, M., Dickmann, J., Wöhler, C.: Semantic radar grids. In: IEEE Intelligent Vehicles Symposium (2017)
Schumann, O., Hahn, M., Dickmann, J., Wöhler, C.: Comparison of random forest and long short-term memory network performances in classification tasks using radar. In: Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn (2017)
Giese, T., Klappstein, J., Dickmann, J., Wöhler, C.: Road course estimation using deep learning on radar data. In: International Radar Symposium (IRS 2017), Prag (2017)
Lombacher, J., Hahn, M., Dickmann, J., Wöhler, C.: Potential of radar for static object classification using deep learning methods. In: IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM) (2016)
Werber, K., Klappstein, J., Dickmann, J., Waldschmidt, C.: Interesting areas in radar gridmaps for vehicle self-localization. In: International Conference on Microwaves for Intelligent Mobility (ICMIM 2016), San Diego (2016)
AdaptIVe Project: AdaptIVe – final project results (2017)
Schumann, O., Hahn, M., Dickmann, J., Wöhler, C.: Supervised clustering for radar applications: on the way to radar instance segmentation. In: ICMIM – (2018)
Duraisamy, B., et al.: Track level fusion of extended objects from heterogeneous sensors. In: 19th International Conference on Information Fusion (FUSION) (2016)
Kellner, D., et al.: Tracking of extended objects with high-resolution doppler radar. IEEE Trans. Intell. Transp. Syst. 17(5)1341–1353 (2016)
Brosseit, P., et al.: The volcanormal density for radar-based extended target tracking. In: IEEE 20th International Conference on Intelligent Transportation Systems (ITSC) (2017)
Duraisamy, B., et al.: Combi-Tor: track-to-track association framework for automotive sensor fusion. In: IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas (2015)
Duraisamy, B., et al.: Track level fusion algorithms for automotive safety applications. In: International Conference on Signal Processing, Image Processing & Pattern Recognition (2013)
Sarholz, F., et al.: Evaluation of different quality functions for road course estimation using imaging radar. In: Intelligent Vehicles Symposium (IV) (2011)
Dehkordi, S., Appenrodt, N., Dickmann, J., Waldschmidt, C.: Region of interest based adaptive high resolution parameter estimation with applications in automotive radar. In: IRS, Bonn (2018)
Duraisamy, B., et al.: Influence of the sensor local track covariance on the track-to-track sensor fusion. In: IEEE 18th International Conference on Intelligent Transportation Systems (2015)
Duraisamy, B., et al.: Object management strategy for an unified high level automotive sensor fusion framework. In: IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Baden-Baden (2016)
Mayer, W.: Abbildender Radarsensor mit sendeseitig geschalteter Gruppenantenne, Dissertation. Institut fuer Mikrowellentechnik, University of Ulm, Ulm (2008)
Daimler AG: Remote parking pilot. http://media.daimler.com/marsMediaSite/de/instance/ko/Remote-Park-Pilot-Ferngesteuertes-Parken-per-Smartphone-App.xhtml?oid=9361355. Zugegriffen: 26 Februar 2018
European Project MOSARIM: MOre Safety for All by radar Interference Mitigation, Proj. Ref. No: 248231, FP7-ICT (2014)
Muntzinger, M., Aeberhard, M., Zuther, S., Schmid, M., Dickmann, J., Dietmayer, K.: Reliable automotive pre-crash system with out-of-sequence measurement processing. In: IEEE Intelligent Vehicles Symposium, pp. 1022–1027 (2010)
Andres, M., Feil, P., Menzel, W.: 3D-scattering center detection of automotive targets using 77 GHz UWB radar sensors. In: EuCAP, Prag (2012)
Hosseini, A., Diewald, F., Klappstein, J., Dickmann, J., Neumann, H.: Modification of the landweber method based on the conjugate gradient method to restore automotive radar images. In: International Conference on Systems, Signals and Image Processing (IWSSIP), Wien (2012)
Kellner, D., Barjenbruch, M., Klappstein, J., Dickmann, J., Dietmayer, K.: Instantaneous full-motion estimation of arbitrary objects using dual doppler radar. In: Intelligent Vehicle Symposium (IV 2014), Dearborn (2014)
Sarholz, F., Mehnert, J., Klappstein, J., Dickmann, J., Radig, B.: Evaluation of different approaches for road course estimation using imaging radar. In: Intelligent Robots and Systems (2011)
Dickmann, J., Klappstein, J., Hahn, M., Muntzinger, M., Appenrodt, N., Brenk, C., Sailer, A.: Present research activities and future requirements on automotive radar from a car manufacturer’s point of view. In: IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Heidelberg (2015)
Dickmann, J., Meinel, H.: Automotive radar: from its origins to future directions. MWJournal 56(9), 24–40 (2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Fachmedien Wiesbaden GmbH, ein Teil von Springer Nature
About this paper

{kind=link}
{kind=link}
Cite this paper
Dickmann, J. et al. (2019). Radar for Autonomous Driving – Paradigm Shift from Mere Detection to Semantic Environment Understanding. In: Bertram, T. (eds) Fahrerassistenzsysteme 2018. Proceedings. Springer Vieweg, Wiesbaden. https://doi.org/10.1007/978-3-658-23751-6_1
Download citation
DOI: https://doi.org/10.1007/978-3-658-23751-6_1
Published:
Publisher Name: Springer Vieweg, Wiesbaden
Print ISBN: 978-3-658-23750-9
Online ISBN: 978-3-658-23751-6
eBook Packages: Computer Science and Engineering (German Language)