
Abstract
A precision seeding control system was developed based on GPS, which could achieve real-time adjustment of seeding speed to ensure seed distribution uniformity. Parameters including seeding rate, row spacing and hole number of seed metering device were entered by users which were transferred by CAN bus to the controller. Its electronic speed control system could work out rotational speed of sowing axis matching with operating speed of tractor automatically. Seed metering device was driven by the hydraulic motor. The field experiment results demonstrated that rate of spacing of normally sown seeds and variable coefficient of this system comparing to traditional land wheel driven planter was relatively 94.1 %, 24.6 % and 89.1 %, 33.1 % while operating speed was 5.9 km/h. If the variation range of seeding spacing shrinks 40 % according the standard request, rate of spacing of normally sown seeds of precision seeding control system was 89.7 % exceeded the traditional land wheel 23 %.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
- Precision seeding
- Control system
- GPS speed measurement
- Hydraulic motor
- Maize planter
- Distribution uniformity of seeds
1 Introduction
Precision seeding is sowing a certain number of seeds into predetermined location of soil that is to say, the 3-dimensional spatial coordinate position of seeds is constituted by row space, seed spacing and seed depth. At present, land wheel was commonly used to drive seed metering device of maize planer and groups of sprockets were applied to change the transmission ratio and adjust seed spacing on maize planters. High resistance and skid of land wheel during seeding operation lead to lower rate of spacing, especially when planters were working in high-speed, heavy straw coverage and none-plowing soil. Adjusting sprockets manually can only change seed space step by step within a certain range, it cannot meet the requirement of precision seeding [1–3]. Practice has proved that there was great different between calibration seeding rate and actual seeding rate. The difference resulted seeding rate decreasing, number of seedlings reducing and lower production which was caused by soil texture, soil moisture, tillage quantity and skid of land wheel, and so on.
Precision seeding control systems have been developed for a long time to save seeds, improve operating speed and make sure seeding uniformity. For example, Germany Amazone Company produced precise variable seeder which could adjust speed infinitely according to instructions from airborne computer with DGPS [4, 5]. A poleless speed controller was designed by Shandong Agricultural University with their seed metering which can adjust rotation speed of sowing axis based on forward speed in PID control mode [6–8]. The electro-hydraulic proportional control hill distance system developed by HAU used PLC to control proportional flow valve and adjusted motor speed in real time based on land wheel speed [9]. However, groups of sprockets and geared head are widely used to change the transmission ratio and adjust seed spacing on maize planters. There is no mature seeding control system to apply in production [10].
In conclusion, a precision seeding control system of maize planter based on GPS was developed by Beijing Research Center of Intelligent Equipment for Agriculture of which hydraulic motor replaced land wheel to drive seed metering. The system realized real-time adjustment of seeding speed to ensure the distribution uniformity of seeds. Performance experiments of the system were conducted in the field.
2 Materials and Methods
2.1 System Organization and Working Principle
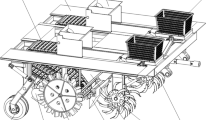
Precision seeding control system of maize planter includes a mechanical seeding system, speed measurement device, hydraulic system, and electronic speed control system, shown in Fig. 1. The mechanical seeding system is consisted of seed metering device and its auxiliary mechanism. Speed measurement device based on high precision GPS and its rate accuracy is 0.1 m/s, the time interval of measurement 1 s. Hydraulic system includes hydraulic motor and proportional valve the function of which is driving seeding axis to match working speed of planter. Electronic speed control system is the most important controller of the system which received working speed by CAN bus from GPS, computed rotational speed of hydraulic motor based on parameters from user and GPS, and controlled hydraulic motor rotation. There is a close-cycle control system with hydraulic motor speed feedback measured by a photoelectric encoder. Speed of seed metering axis will adjust in real time while working speed changing which make sure seed spacing adjusting accuracy and its adjustment range expanded.

Structure diagram of precision seeding control system of maize planter
2.2 System Seeding Space Control
The system requires users to input parameters of planter and objective seeding rate in human-computer interaction interface. Figure 2 is the seeding setting module of system. High precision GPS measures working speed in real time while operation starting, and the speed information and other parameters transfer to the controller for calculating rotational speed of motor. The relation between motor speed and other parameters is as follows:

Seeding setting module
Where n m is output rotational speed of motor/r∙min−1, v m is working speed measured by GPS/m∙s−1, C is row space/m, S is seed spacing/m, Z is hole number of seed metering device, i is transmission ratio of motor axis and sowing axis, N is the number of seeds per ha.
2.3 Experiment Methods
Experiments were conducted in spring 2015 in Xiaotangshan National Precision Agriculture Research Demonstration Base. Sowing uniformity of the system on 2BQX-6 maize planter was measured in different working speed and different seeding rate. Two kinds of treatment were arranged: sowing on surface and normal sowing. Sowing on surface can make sure seeds maximally exposed on soil surface, which should decrease the action of depth roller and press wheel to minimize. Normal sowing is seeding to suitable depth according to maize demand. Experiments mainly surveyed seeding uniformity index included rate of spacing of normally sown seeds, rate of miss (multiple), and variable coefficient based on JB/T 10293-2013 Specifications for single seed drills (precision drills).
3 Results and Discussion
3.1 Seeding Uniformity in Different Working Speed
In this experiment, setting the same row space, hole number of seed metering device, and target seeding rate, sowing on surface, test results for low speed and high speed respectively repeated three times were presented in Table 1.
3.2 Seeding Uniformity in Different Seeding Rate
In this experiment, setting the same row space, hole number of seed metering device, and keeping working speed at 5.6 km/h, sowing on surface, test results for target seeding rate 75000 per ha and 67500 per ha respectively repeated three times were presented in Table 2.
The results of different speed and different seeding rate showed that it was up to standard request that rate of spacing of normally sown seeds of the precision seeding control system. Meanwhile, there was no significant difference between the different levels of working speed and seeding rate. Sowing on surface always led to bouncing while seeds touching soil and influencing seed space greatly. In view of the disadvantage of sowing on surface, sowing on surface and normal sowing comparison experiments were conducted.
3.3 Different Sowing Method Comparison Experiments
In this experiment, setting the same seeding rate and keeping the same working speed, test results of distribution uniformity of seed on different sowing method, sowing on surface and normal sowing respectively repeated three times were presented in Table 3. The results showed that sowing on surface leads to lower uniformity index because of seed bouncing. However, rate of spacing, rate of miss and rate of multiple were qualified when seed was sown into soil layer as standard requested. To sum up, the precision seeding control system met specifications for precision seed drills.
3.4 Different Seeding Driven Comparison Experiments
Performance testing of precision seeding control system indicated that the major index such as rate of spacing, CV, were above standard request. Moreover, the performance of system was close to bench test [11–14]. To check out the system advantage, comparison experiments on seeding driven by traditional land wheel and system were conducted. In this experiment, using 2BQX-6 maize planter and keeping parameters consistent except seeding driven device, test results for seeding driven by land wheel and control system respectively repeated three times were presented in Table 4. The results showed that seeding uniformity of system was apparently higher than land wheel, and CV was obvious lower than it. Therefore, the system has significant function on enhancing seeding precision.
3.5 Analysis on Rate of Spacing
Normal seed spacing is distance of two adjacent seeds in the soil between half theory seed spacing and one-and-a-half seed spacing in JB/T 10293-2013 Specifications for single seed drills (precision drills). If rate of seed spacing is equal or greater than 80 %, and rate of multiple, rate of miss is respectively equal or less than 15 % and 8 % while theory seed spacing between 20 and 30 cm, CV equal or less than 30 % is qualified operation [15].
The system is based on high precision GPS measuring speed and hydraulic motor driving seed metering device which has high accuracy speed measurement and high stability rotational speed control. It can improve uniformity and distribution stability of seed spacing. If the range of normal seed spacing shrinks 40 %, that is new normal seed spacing between 0.7 times and 1.3 times theory seed spacing as qualified. Figures 3 and 4 demonstrated the distribution of seed spacing driven by land wheel and the precision seeding control system respectively. Rate of spacing of normally sown seeds measured according to standards were 89.1 % and 94.1 %, driven by land wheel and control system respectively. Meanwhile, based on the new normal seed spacing standard, the corresponding rate of spacing were 66.7 % and 89.7 % respectively. It can be seen that precision seeding control system can greatly keep seed spacing stability and increase seed distribution uniformity. It is helpful for maize to enhance ventilation and light transmission, be beneficial to root growth, and improve lodging-resistance capability [16–18].

Distribution of seed spacing driven by traditional land wheel

Distribution of seed spacing driven by precision seeding control system
4 Conclusions
Precision seeding control system consists of a mechanical seeding system, speed measurement device, hydraulic system, and electronic speed control system. The system was adopted to solve land wheel skid and seed spacing adjusting problem during seeding operation. The system experiments indicated that different levels of working speed and seeding rate showed no significant difference on rate of spacing, rate of miss (multiple), et al. Rate of spacing of normally sown seeds measured according to standards were 89.1 % and 94.1 %, driven by land wheel and control system respectively. Meanwhile, after shrinking the range of normal seed spacing 40 %, the corresponding rate of spacing was 66.7 % and 89.7 % respectively. The system provides technology and experiment reference for precision seeding system, whereas there are some improvements in starting and stopping stage of seeding operation. Seeding information offered by users transferred from human-computer interaction interface to seed metering axis goes through GPS device, seeding control terminal, rotational speed controller and hydraulic motor. There is delayed starting and stopping of seed metering about 5 m respectively during an operation speed between 5 km/h and 6 km/h. More research on method and precision of switching between land wheel and control system for seeding driven is likely to solve the problem of delayed, and this will provide assistance to the precision seeding control system enlarging application range in kinds of planters.
References
Mei, T., Li, Z., Wang, X., et al.: Study on pneumatic precision seeder in China. Agric. Equip. Veh. Eng. 51(4), 17–21 (2013)
Sun, Q., Wang, Y., Wang, D., et al.: Experimental study on pneumatic precision seed metering mechanism of field breeding planter. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 28(Supp. 2), 59–64 (2012)
Gong, L., Yuan, Y., Shang, S., et al.: Design and experiment on electronic control system for plot seeder. Trans. CSAE 27(5), 122–126 (2011)
Zhang, M., Wu, C.: The survey and the prospect in china of the pneumatic drills. Chin. Agric. Mechanization 2, 70–72 (2008)
He, Y.: Precision Agriculture, pp. 178–192. Zhejiang University Press, Hangzhou (2010)
Zhao, L., Zhang, Y., Song, W., et al.: Improved application of stepless speed control technology in seeding machine. Comput. Syst. Appl. 23(6), 250–254 (2014)
Wang, C., He, R.: Performance detection of precision seed-metering device based on single chip microprocessor. Sci. Technol. Eng. 33(12), 8302–8329 (2011)
Li, J., Zhao, L., Bi, J., et al.: Design of intelligent control system for two-row precise seeding of wheat. Trans. CSAE 5(28), 134–139 (2012)
Fu, W., Luo, X., Zeng, S., et al.: Design and experiment of electro-hydraulic proportional control hill distance system of precision rice hill-drop drilling machine for dry land. Trans. CSAE 31(9), 25–31 (2015)
Tang, X.: Research on the Planting Drive System Based on a Tractor Front-Wheel Speed. Hebei Agricultural University, Baoding (2009)
Wang, J., Tang, H., Zhou, W., et al.: Improved design and experiment on pickup finger precision seed metering device. Trans. CSAM 9 (2015)
Liu, J., Cui, T., Zhang, D., et al.: Experimental study on pressure of air-blowing precision seed-metering device. Trans. CSAE 27(12), 18–22 (2011)
Yu, J., Wang, G., Xin, N., et al.: Simulation analysis of working process and performance of cell wheel metering device. Trans. CSAM 142(12), 83–87 + 101 (2011)
Shi, S., Zhang, D., Yang, L., et al.: Design and experiment of pneumatic maize precision seed-metering device with combined holes. Trans. CSAE 30(5), 10–18 (2014)
People’s Republic of China Ministry of Industry and Information Technology. JB/T10293-2013 Specifications for single seed drills (precision drills). Machinery Industry Press, Beijing (2014)
Cui, T., Zhang, D., Yang, L., et al.: Design and experiment of collocated-copying and semi-low-height planting-unit for corn precision seeder. Trans. CSAE 28(S2), 18–23 (2012)
Li, D., Jiang, X., Tong, L.: Effect of planting density on root-shoot growth and water utilization efficiency of seed corn. J. Drainage Irrig. Mach. Eng. 32(12), 1091–1097 (2014)
Liu, Z., Xiao, J., Yu, J., et al.: Effects of varieties and planting density on plant traits and water consumption characteristics of spring maize. Trans. CSAE 28(11), 125–131 (2012)
Acknowledgment
Fund for this research was provided by the National 863 Program (2012AA101901), precise operation technology and equipment for large-scale production of food crops.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 IFIP International Federation for Information Processing
About this paper
Cite this paper
Gao, N., Fu, W., Meng, Z., Wei, X., Li, Y., Cong, Y. (2016). Research and Experiment on Precision Seeding Control System of Maize Planter. In: Li, D., Li, Z. (eds) Computer and Computing Technologies in Agriculture IX. CCTA 2015. IFIP Advances in Information and Communication Technology, vol 478. Springer, Cham. https://doi.org/10.1007/978-3-319-48357-3_49
Download citation
DOI: https://doi.org/10.1007/978-3-319-48357-3_49
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-48356-6
Online ISBN: 978-3-319-48357-3
eBook Packages: Computer ScienceComputer Science (R0)