
Abstract
This chapter presents the numerical simulations using a strain space multiple mechanism model on a liquefiable sloping ground during earthquake excitation which are compared with the results obtained from the centrifuge tests conducted at different centrifuge facilities as a part of LEAP-ASIA-2019 with an effort to validate the generalized scaling laws. The constitutive model parameters were determined based on the results of cyclic torsional shear tests. One of the key objectives of this chapter is to assess the differences arising in the soil system responses depending on the three different predictors when using the same constitutive model. For this purpose, the soil constitutive model parameters were calibrated differently, and all the predictors were able to capture the important features of saturated sand during undrained cyclic shearing. This was followed by the numerical simulations of the centrifuge data, which showed no predominant differences in the simulated results due to the different soil constitutive model parameters. However, the amount of shear-induced dilatancy experienced by the sand during cyclic shearing was found out to be different among predictors. It is also highlighted that predictors may achieve the ideal measured results either by performing numerical simulations in model scale or in prototype scale.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The Liquefaction Experiments and Analysis Project (LEAP) is an international research collaborative venture for validating and assessing the suitability of various soil constitutive models based on the extensive validation exercise with centrifuge testing conducted at different geotechnical centrifuge facilities around the world. The main objective of the LEAP-ASIA-2019 project was to validate the generalized scaling laws proposed by Iai et al. (2005). To this end, this chapter presents the numerical simulation exercise to assess the capability of the strain space multiple mechanism model in capturing the response of a saturated sloping ground during earthquake-induced liquefaction and lateral spreading. It is thought that numerical simulation results might be governed significantly depending on the numerical predictors, for which the numerical simulations were conducted by three different numerical predictors and a particular focus has been given to the problem of (a) constitutive model calibration (b) the effects arising due to a different scale, i.e., model and prototype scale, and (c) effect of mesh size in the simulation.
2 Brief Summary of the Centrifuge Experiments
Figure 15.1 shows the adopted schematic model for LEAP-ASIA-2019 centrifuge tests. Some of the centrifuge facilities were excited with an earthquake waveform parallel to the axis of centrifuge, whereas some of the facilities were shaken in the circumferential direction of the centrifuge arm. It is to be noted that in the latter case, the ground surface was curved to consider the influences arising due to a radial gravity field during spin up in a short arm centrifuge (see Tobita et al., 2018 and Sahare et al., 2020 for further details). The model is a liquefiable sloping ground and is composed of Ottawa F-65 sand, with a 5-degree inclination. Figure 15.1 also shows the location of various instrumentations used during the centrifuge testing, where “AH” indicates an accelerometer and “P” portrays a pore pressure transducer. The centrifuge tests were performed at different facilities to capture the soil system response under different physical conditions with a different achieved soil relative density and with different earthquake characteristics having an altered imparted input acceleration amplitude. As mentioned previously, the major objective of LEAP-ASIA-2019 project was to validate the generalized scaling laws, for which two different models were developed: Model A (tested as per the conventional scaling laws) and Model B (tested as per the generalized scaling laws). Tables 15.1 and 15.2 indicate the centrifuge experiments which were used to validate the developed numerical models reported in this chapter.

Schematic representation of LEAP-ASIA-2019 centrifuge model tests: (a) Sectional view for shaking parallel to the axis of the centrifuge; (b) Sectional view for shaking in the plane of spinning of the centrifuge
3 Strain Space Multiple Mechanism Model
The numerical analysis was conducted using a strain space multiple mechanism model incorporating a new stress-dilatancy relationship (Iai et al., 2011). The strain space multiple mechanism model was originally proposed by Iai et al. (1992). The model has been implemented into a finite element program, called “FLIP ROSE (Finite Element Analysis Program of Liquefaction Process/Response of Soil-structure Systems during Earthquakes)” (Iai et al., 1995, 1998; Ozutsumi et al., 2002) and has been extended based on the finite strain theory (see Ueda, 2009; Iai et al., 2013) and is widely used to examine the cyclic response of granular materials in Japan as an effective stress model. In this model, the behavior of granular materials is idealized on the basis of a multitude of virtual simple shear mechanisms oriented in arbitrary directions (see Ueda & Iai, 2018).
3.1 Determination of Model Parameters
Parameters of the strain space multiple mechanism model are broadly classified into three types according to the volumetric mechanism, shear mechanism, and dilatancy. The calibrated constitutive model parameters are illustrated in Tables 15.3 and 15.4, which were determined from cyclic torsional shear test results performed at a relative density of 60% (see Vargas et al., 2020 for further details about the element tests). As discussed previously, the numerical calibration and simulations were conducted by three predictors hereafter referred to as FLIP1, FLIP2, and FLIP3 as shown in Tables 15.3 and 15.4. The constitutive model parameters were quite different among the three modelers. The liquefaction resistance curves obtained from the cyclic torsional shear test and simulated by the three predictors at a double amplitude shear strain of 7.5% and at different values of the cyclic stress ratio (CSR) are shown in Fig. 15.2. From Fig. 15.2, one can observe all the three numerical models to capture the necessary features of the measured cyclic soil response. At a smaller cyclic stress ratio, FLIP1 and FLIP3 slightly overpredicted the number of cycles to achieve the desired strain level. On the other hand, FLIP2 slightly underestimated the number of cycles at the least CSR value.

Liquefaction resistance curves obtained from numerical simulation for FLIP 1, FLIP 2 and FLIP 3 (Dr =60%; γDA 7.5%)
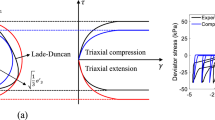
The typical soil response obtained by the three predictors at a cyclic stress ratio of 0.18 is shown in Fig. 15.3 in terms of stress path and stress-strain relationship at a relative density of 60%. Overall, all the three models with different constitutive model parameters captured the important undrained cyclic soil response as observed in the torsional test including the butterfly-shaped undrained stress path. However, a very similar strain as recorded in the element test was estimated by FLIP3, however at the expense of slightly larger vertical effective stress value. FLIP2 on the other hand predicted the undrained stress-path to approach close to the origin similar to the experiment but at the expense of significantly larger estimated shear strain as shown in Fig. 15.3.

Typical numerically simulated element test results obtained by FLIP 1, FLIP 2, and FLIP 3 (Dr = 60%, shear stress ratio = 0.18)
3.2 Initial Boundary Conditions
The finite element (FE) analysis was carried out considering a two-dimensional plane strain condition. Figure 15.4 represents the mesh developed by each of the numerical predictors. The numerical analysis was carried out considering the four-node quadrilateral elements, which is based on the reduced integration (SRI) technique (Hughes, 1980). The mesh size in FLIP1 numerical model was determined to be less than 1/2 of the input wavelength. The mesh size for FLIP2 was determined to be 1/8 over a quarter wavelength of 4 m to account for reasonable deformation mode of the sloping ground, whereas for FLIP3, the mesh size was very fine to consider the effect of high-frequency components.

Mesh for the numerical models developed by the three predictors, FLIP1, FLIP2, and FLIP3
The degrees of freedom for displacement at the base of the models were fixed both horizontally and vertically, while only horizontal displacement is fixed at the side boundaries. The side and bottom boundaries were set to be impermeable, and pore water pressure at the ground surface was specified to represent a hydrostatic condition.
A self-weight analysis was carried out prior to the dynamic response analysis for evaluating initial stress distribution throughout the numerical model. Numerical time integration was carried out by the SSpj method (Zienkiewicz et al., 2000). The standard parameters for SSpj method are used as per Ueda & Iai (2018).
Table 15.5 shows the coefficients of permeability used by the three predictors during the numerical analysis. The coefficient of permeability of Ottawa F-65 sand was taken from the permeability tests carried out by Kutter et al. (2018) and was adjusted depending on the dissipation process of excess pore water by all the predictors if applicable. For all the facilities, the permeability of soil was adjusted based on the scaling laws adopted by the corresponding centrifuge facility. Because analysis by FLIP1 and FLIP3 was performed in model scale and that by FLIP2 was performed in the prototype scale, FLIP1 and FLIP3 considered the coefficient of permeability of soil in model scale whereas FLIP2 carried out the numerical simulations considering the coefficient of permeability in the prototype scale.
Table 15.6 shows the Rayleigh damping factor (β) adopted by each predictor. For FLIP 1 and FLIP2, the values were determined based on the parametric study after performing the one-dimensional ground response analysis for a non-liquefiable ground surface and were estimated so that the maximum displacement was no longer affected. However, for FLIP3, the damping factor was directly adjusted based on the results obtained from the centrifuge tests so as to replicate the test results more accurately.
4 Results and Discussions for the Type-B Simulations
This section presents the results of Type-B simulations for centrifuge Models A (tested as per the conventional scaling laws) at the geotechnical centrifuge facilities located in Kyoto University, Rensselaer Polytechnic Institute and University of California Davis (indicated as KyU_A_A2_1, RPI_A_A1_1, and UCD_A_A2_1; shown in Table 15.1) and Models B (tested as per the generalized scaling laws) at the geotechnical centrifuge facilities located in Kyoto University and the Rensselaer Polytechnic Institute (indicated as KyU_A_B2_1 and RPI_A_B1_1; shown in Table 15.2).
4.1 Observed Soil-System Response During Liquefaction Induced Lateral Spreading
Figures 15.5, 15.6, 15.7, 15.8 and 15.9 show the results obtained from the numerical simulations for the soil-system response in terms of acceleration (AH4), excess pore pressure (P4), and lateral soil displacement for Model A and Model B with considered instrumentations located towards the ground surface in the center array of the model (see Fig. 15.1). FLIP3 adjusted the coefficient of the permeability and the Rayleigh damping factor (β) to match the centrifuge test results and hence FLIP3 results can be said to represent Type-C simulations.

Simulated results by the predictors FLIP1, FLIP2, and FLIP3 for the test KyU_A_A2_1 (Model A) in terms of acceleration response (AH4), excess pore pressure (P4), and soil displacement (see Fig. 15.1 for the location of sensors)

Simulated results by the predictors FLIP1, FLIP2, and FLIP3 for the test RPI_A_A1_1 (Model A) in terms of acceleration response (AH4), excess pore pressure (P4) and soil displacement (see Fig. 15.1 for the location of sensors)

Simulated results by the predictors FLIP1, FLIP2, and FLIP3 for the test UCD_A_A2_1 (Model A) in terms of acceleration response (AH4), excess pore pressure (P4), and soil displacement (see Fig. 15.1 for the location of sensors)

Simulated results by the predictors FLIP1, FLIP2, and FLIP3 for the test KyU_A_B2_1 (Model B) in terms of acceleration response (AH4), excess pore pressure (P4), and soil displacement (see Fig. 15.1 for the location of sensors)

Simulated results by the predictors FLIP1, FLIP2, and FLIP3 for the test RPI_A_B1_1 (Model B) in terms of acceleration response (AH4), excess pore pressure (P4), and soil displacement (see Fig. 15.1 for the location of sensors)
The numerical simulation results seem to be well-matched with the centrifuge test results despite of the fact that the constitutive model parameters were calibrated differently by the three predictors. Overall, the accelerations response in FLIP1, FLIP2, and FLIP3 are found to be well-matched with the test results. However, negative spikes often appeared more prominently as compared to the centrifuge test results in the case of predictors FLIP1 and FLIP2 which indicates large prevailing soil dilatancy. For some of the cases, the dissipation period was estimated to be longer than the centrifuge test results, depending on the coefficient of permeability used by the predictors. The displacements obtained from the numerical simulations are also found to be very close to the centrifuge test results.
4.2 Numerical Analyses in the Model Scale and the Prototype Scale
As described earlier, numerical analyses by predictors FLIP1 and FLIP3 were carried out on a model scale, whereas the predictor FLIP2 conducted the simulations in the prototype scale.
For the simulation results for KyU_A_A2_1, the peak acceleration at sensor AH4 is obtained at 10 s by all the predictors, which was consistent with the timing of peak acceleration measured in the centrifuge model test (Fig. 15.5). FLIP1 obtained maximum horizontal acceleration of 0.65g, whereas FLIP2 obtained a value of 0.44g, and FLIP3 estimated it as 0.14g, as compared to 0.16g obtained from centrifuge test. The excess pore pressure generation for sensor P4 is nearly identical for all the predictors with slight differences observed in the dissipation period. However, larger negative spikes were obtained in the case of FLIP1 and FLIP2. The dissipation period is found to be slightly different for FLIP1 depending on the lower permeability value used by the corresponding predictor. The peak lateral displacement at the location of marker 2–3 is estimated to be 0.068 m by FLIP1, 0.049 m by FLIP2, and 0.067 m by FLIP 3, respectively. The maximum lateral displacement achieved from the centrifuge test result was 0.0365 m. Hence, it can be seen that the results obtained were nearly similar among all the predictors, which were close to centrifuge results.
For the simulation result of KyU_A_B2_1, the peak acceleration values at sensor AH4 were obtained at 10 s by all the predictors, as it was observed in the centrifuge acceleration response (Fig. 15.8). The maximum estimated horizontal acceleration is 0.40g by FLIP1, 0.70g by FLIP 2, and 0.40g by FLIP 3, respectively, whereas 0.45g was obtained from the centrifuge test as is reported in Fig. 15.8. Hence, it can be said that the response is nearly similar with slightly different amplitudes of acceleration depending on the soil dilatancy. The pore pressure variation is also found to be similar among all the predictors with slight differences observed in the dissipation period. The peak lateral displacement at the location of marker 2–3 is estimated to be 0.065 m, 0.067 m, and 0.126 m for FLIP1, FLIP2, and FLIP3, respectively. The maximum lateral displacement achieved from the centrifuge test is 0.10 m. Hence, the maximum lateral displacement was nearly similar among all the predictors with a slight variation at the period of occurrence.
5 Conclusions
This chapter summarizes the differences obtained in the soil system response conducted by the three different numerical predictors using the same soil constitutive model. The following conclusions are derived based on the study.
-
1.
Type-B prediction
-
It was found that for Type-B prediction, simulated results could predict the centrifuge test results with sufficient accuracy through the strain space multiple mechanism model.
-
From the numerical simulation results conducted by all the three predictors, a dilative pulse was observed in the acceleration response in the downslope direction similar to the centrifuge test results.
-
The rise of excess pore water pressure and its dissipation is found to be well simulated with the centrifuge test results.
-
-
2.
Constitutive model parametric variation
-
FLIP1, FLIP2, and FLIP3 used different soil constitutive model parameters, including the liquefaction and dilatancy parameters. From the simulation results, it is seen that the soil response obtained by all the three predictors in terms of acceleration, pore pressure, and lateral displacement was found to be in good agreement with the centrifuge test results for all the centrifuge facilities reported in this chapter, despite using different constitutive model parameters.
-
Hence, it can be said that the soil response to an earthquake loading may not highly depend on the variations in the constitutive model parameters and nearly similar results may be achieved with sufficient accuracy by the different numerical predictors as long as the simulated liquefaction resistance curves and stress-strain behavior during cyclic shear are consistent with each other.
-
-
3.
Effect of the different simulation scales
-
The influence of the simulation scale was also studied in the present paper depending on the different scales used by the numerical predictors FLIP1, FLIP3 (model scale), and FLIP2 (prototype scale) while developing the numerical model. From the numerical analysis, it was found that the simulation results are almost similar for the model scale and the prototype scale. It was also concluded that the strain space multiple mechanism model used for this study is consistent with the generalized scaling law adopted for centrifuge model tests performed in the LEAP project.
-
References
Hughes, T. J. (1980). Generalization of selective integration procedures to anisotropic and nonlinear media. International Journal for Numerical Methods in Engineering, 15(9), 1413–1418.
Iai, S., Matsunaga, Y., & Kameoka, T. (1992). Strain space plasticity model for cyclic mobility. Soils and Foundations, 32(2), 1–15.
Iai, S., Morita, T., Kameoka, T., Matsunaga, Y., & Abiko, K. (1995). Response of a dense sand deposit during 1993 KUSHIRO-OKI earthquake. Soils and Foundations, 35(1), 115–131.
Iai, S., Ichii, K., Liu, H., & Morita, T. (1998). Effective stress analyses of port structures. Soils and Foundations, 38(Special), 97–114.
Iai, S., Tobita, T., & Nakahara, T. (2005). Generalised scaling relations for dynamic centrifuge tests. Geotechnique, 55(5), 355–362.
Iai, S., Ueda, K., Tobita, T., & Ozutsumi, O. (2013). Finite strain formulation of a strain space multiple mechanism model for granular materials. International Journal for Numerical and Analytical Methods in Geomechanics, 37(9), 1189–1212.
Iai, S., Tobita, T., Ozutsumi, O., & Ueda, K. (2011). Dilatancy of granular materials in a strain space multiple mechanism model. International Journal for Numerical and Analytical Methods in Geomechanics, 35(3), 360–392.
Kutter, B. L., Carey, T. J., Hashimoto, T., Zeghal, M., Abdoun, T., Kokkali, P., et al. (2018). LEAP-GWU-2015 experiment specifications, results, and comparisons. Soil Dynamics and Earthquake Engineering, 113, 616–628.
Ozutsumi, O., Sawada, S., Iai, S., Takeshima, Y., Sugiyama, W., & Shimazu, T. (2002). Effective stress analyses of liquefaction-induced deformation in river dikes. Soil Dynamics and Earthquake Engineering, 22(9–12), 1075–1082.
Sahare, A., Tanaka, Y., & Ueda, K. (2020). Numerical study on the effect of rotation radius of geotechnical centrifuge on the dynamic behavior of liquefiable sloping ground. Soil Dynamics and Earthquake Engineering, 138, 106339.
Tobita, T., Ashino, T., Ren, J., & Iai, S. (2018). Kyoto University LEAP-GWU-2015 tests and the importance of curving the ground surface in centrifuge modelling. Soil Dynamics and Earthquake Engineering, 113, 650–662.
Ueda, K. (2009). Finite strain formulation of a strain space multiple mechanism model for granular materials and its application. Doctoral dissertation, PhD thesis. Graduate School of Engineering, Kyoto University [in Japanese].
Ueda, K., & Iai, S. (2018). Numerical predictions for centrifuge model tests of a liquefiable sloping ground using a strain space multiple mechanism model based on the finite strain theory. Soil Dynamics and Earthquake Engineering, 113, 771–792.
Vargas, R. R., Ueda, K., & Uemura, K. (2020). Influence of the relative density and K0 effects in the cyclic response of Ottawa F-65 sand-cyclic torsional hollow-cylinder shear tests for LEAP-ASIA-2019. Soil Dynamics and Earthquake Engineering, 133, 106111.
Zienkiewicz, O. C., Taylor, R. L., & Zhu, J. Z. (2000). The finite element method: Its basis and fundamentals (6th edition). Elsevier.
Acknowledgments
The authors are grateful to all the centrifuge facility groups, who took part in the LEAP Project and allowed their data to be used for numerical simulation exercises.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this paper

Cite this paper
Tanaka, Y., Sahare, A., Ueda, K., Yuyama, W., Iai, S. (2024). LEAP-ASIA-2019 Numerical Simulations Using a Strain Space Multiple Mechanism Model for a Liquefiable Sloping Ground. In: Tobita, T., Ichii, K., Ueda, K. (eds) Model Tests and Numerical Simulations of Liquefaction and Lateral Spreading II. LEAP 2019. Springer, Cham. https://doi.org/10.1007/978-3-031-48821-4_15
Download citation
DOI: https://doi.org/10.1007/978-3-031-48821-4_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-48820-7
Online ISBN: 978-3-031-48821-4
eBook Packages: EngineeringEngineering (R0)