
Abstract
When we expand the simple structure (\(\mathbb {Z}\),succ) with one unary predicate U, its CSP (Constraint Satisfaction Problem) may vary in complexity. We find some sufficient conditions for its tractability, prove bounds on its complexity, and then generalize our results to more complicated structures. We also give a Karp-equivalent characterization of CSP\((\mathbb {Z},\text {succ},U)\)’s.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Notes
- 1.
That is, for the j-ary relation \(R_j\), each \((y_1,\cdots ,y_j)\in \{x_1,\cdots ,x_r\}^j\) is in \(R_j^G\iff R_j(y_1,\cdots ,y_j)\) is a conjunct appearing in \(\psi \).
- 2.
As \(x\rightarrow \infty \), f is eventually monotonic, and the formal derivative \(|f'(x)|\sim \Omega (x)\), and when \(|f'(x)|\sim \varTheta (x)\) the absolute value of coefficient of x-term is at least 2. For \(c>>0\) we have \(|f(x)-f(x^*)|\ge \max \{|f(x)-f(x-1)|,|f(x)-f(x+1)|\}> x\) whenever \(c<x\in \omega , x^*\in \omega \smallsetminus \{x\}\). So indeed \(U_f\) is ELG.
- 3.
The two more mild assumptions are (1) g is eventually monotonic and (2) \(|g'(x)|\sim \omega (|x|)\). Indeed, for \(x>>0\) we have \(\frac{|g(x)-g(x-1)|}{1}\ge |g'(x-1)|\sim \omega (x-1)\) so LHS \(>x\) eventually, and similarly, \(|g(x+1)-g(x)|>x\) eventually.
- 4.
Conventionally, \(\langle \bullet \rangle \) is the binary representation of an integer and \(|\bullet |\) is the length.
- 5.
Appendix C.2.
- 6.
Any interpretation of \(\textbf{0}\) works; without loss of generality we pick \(\textbf{0}^{(\mathfrak {A},\textbf{0})}=0\in \mathbb {Z}\).
- 7.
- 8.
Note that the runtime of this SEARCH-CSP accounts for the time to write down the h(x)’s for each \(x\in \mathfrak {D}\). Later when we compute the shift \(a-h(\textbf{0}^\mathfrak {D})\), the overhead is dominated by the runtime of the SEARCH-CSP. The total overhead of computing \(s\circ h\) is therefore at most that of running O(|D|) times of the SEARCH-CSP cost.
- 9.
Some remark: first, Proposition 3(3) implies \((\mathfrak {A},\textbf{0}) \)) is also not \(\omega \)-categorical. Also, if \( E=\emptyset \) then \((\mathfrak {A},\textbf{0})\) is indeed \(\omega \)-categorical. We use the following equivalent characterization: a structure \(\mathfrak {A}\) is \(\omega \)-categorical iff Some countable model of T realizes only finitely many complete n-types for each \(n<\omega \). For any \(n\ge 1\), a complete n-type \((x_1,\dots ,x_n)\) only needs to make a decision for each \(x_i\) as to whether \(x_i\in U\), and whether \(x_i=\textbf{0}\). Thus there are finitely many complete n-types for any n. Likewise \(({\mathfrak {A}^\downarrow },\textbf{0})\) is \(\omega \)-categorical for having even fewer n-types.
- 10.
Note: if for some i both \((x_i,x_{i+1})\) and \((x_{i+1},x_i)\) are in E then the graph cannot homomorphically map to \((\mathbb {Z},\text {succ})\); if between x, y there exist two different signed paths with different signed lengths, the graph is also not in CSP\((\mathbb {Z},\text {succ})\).
- 11.
(e.g. [18] for proof of isomorphism of cores in the special case of graphs) Let \(\mathfrak {B}_1,\mathfrak {B}_2\subset _{\text {ind}}\mathfrak {A}\) be cores, witnessed by \(e_1:\mathfrak {A}\rightarrow \mathfrak {B}_1,e_2:\mathfrak {A}\rightarrow \mathfrak {B}_2\), two surjective homomorphisms (otherwise \(\mathfrak {B}_*\) is not a core). Then \(e_1\vert _{\mathfrak {B}_2}\) is also surjective, for otherwise \((e_1\vert _{\mathfrak {B}_2})\circ e_2\) gives an induced substructure of \(\mathfrak {B}_1\) which is an endomorphic image. Dually \(e_2\vert _{\mathfrak {B}_1}\) is surjective. Therefore \(|B_1|=|B_2|\), \(e_1\vert _{\mathfrak {B}_2}\) and \(e_2\vert _{\mathfrak {B}_1}\) are bijective homomorphisms, and we have the isomorphism.
- 12.
Note: \(\mathfrak {A}\) is input-independent, hence core\((\mathfrak {A})=\mathfrak {B}\).
- 13.
That is, take a copy of \(\mathfrak {D}\) and a copy of \(\mathfrak {B}\), glue b and d.
- 14.
\(e:\mathfrak {B}\rightarrow \mathfrak {B}\) must be surjective, so bijective. As \(\text {Im}{e}\subseteq _{\text {ind}}\mathfrak {B}\), the bijectivity says \(\text {Im}{e}=\mathfrak {B}\). In particular this says e preserves the number of solutions for each \(R_i\), i.e. there cannot be \((a_1,\dots ,a_{r_i})\notin R_i^{\mathfrak {B}}\) s.t. \((e(a_1),\dots ,e(a_{r_i}))\in R_i^\mathfrak {B}\). It follows that e preserves the relations bidirectionally, hence an automorphism.
- 15.
Note e.g. when \(m=2\) in the
 direction has \(\sigma \circ h\vert _\mathfrak {D}\) sending \([d_i]\) to \([b_i]\) for both i as each \(b_i\in B\).
direction has \(\sigma \circ h\vert _\mathfrak {D}\) sending \([d_i]\) to \([b_i]\) for both i as each \(b_i\in B\). - 16.
The algorithm also has the benefit that whenever a homomorphism is found, the solution tuple \((h(d_1),\dots ,h(d_{|D|}))=(b_{s,1},\dots ,b_{s,|D|})\) is the minimal element in the dictionary order by indices in the target. That is, for any other solution \((b'_{s,1},\dots ,b'_{s,|D|})\in B^{|D|}=(b_1\prec \dots \prec b_{|B|})^{|D|}\), \((b_{s,1},\dots ,b_{s,|D|})\preceq (b'_{s,1},\dots ,b'_{s,|D|})\).
- 17.
If the implication were true, for Theorem 3 we would have algebraic conditions without reference of “all finite connected \(\tau \)-structures”, which would be considerably cleaner.
- 18.
Similarly by \((\mathbb {Z},E)\le ^p_m(\mathbb {Z},E,U)\), we know there are \((\mathbb {Z},E,U)\)’s whose CSP is not in \(\texttt{NP}\): just let the underlying \((\mathbb {Z},E)\) be such that its CSP is CoNP-complete, which exists by Theorem 13.3.1 [3].
- 19.
 direction has
direction has References
Barto, L., Kozik, M., Niven, T.: The CSP dichotomy holds for digraphs with no sources and no sinks (a positive answer to a conjecture of bang-jensen and hell). SIAM J. Comput. 38(5), 1782–1802 (2009)
Bodirsky, M.: Graph homomorphisms and universal algebra course notes. TU Dresden (2015)
Bodirsky, M.: Complexity of Infinite-Domain Constraint Satisfaction, vol. 52. Cambridge University Press (2021)
Bodirsky, M., Grohe, M.: Non-dichotomies in constraint satisfaction complexity. In: Aceto, L., Damgård, I., Goldberg, L.A., Halldórsson, M.M., Ingólfsdóttir, A., Walukiewicz, I. (eds.) ICALP 2008. LNCS, vol. 5126, pp. 184–196. Springer, Heidelberg (2008). https://doi.org/10.1007/978-3-540-70583-3_16
Bodirsky, M., Kára, J.: The complexity of temporal constraint satisfaction problems. J. ACM (JACM) 57(2), 1–41 (2010)
Bodirsky, M., Mamino, M.: Constraint satisfaction problems over numeric domains. In: Dagstuhl Follow-Ups, vol. 7, Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik (2017)
Bodirsky, M., Martin, B., Mamino, M., Mottet, A.: The complexity of disjunctive linear diophantine constraints. arXiv preprint arXiv:1807.00985 (2018)
Bodirsky, M., Martin, B., Mottet, A.: Constraint satisfaction problems over the integers with successor. In: Halldórsson, M.M., Iwama, K., Kobayashi, N., Speckmann, B. (eds.) ICALP 2015. LNCS, vol. 9134, pp. 256–267. Springer, Heidelberg (2015). https://doi.org/10.1007/978-3-662-47672-7_21
Bodirsky, M., Martin, B., Mottet, A.: Discrete temporal constraint satisfaction problems. J. ACM (JACM) 65(2), 1–41 (2018)
Bodirsky, M., Martin, B., Pinsker, M., Pongrácz, A.: Constraint satisfaction problems for reducts of homogeneous graphs. SIAM J. Comput. 48(4), 1224–1264 (2019)
Bodirsky, M., Pinsker, M.: Schaefer’s theorem for graphs. J. ACM (JACM) 62(3), 1–52 (2015)
Braunfeld, S., Laskowski, M.C.: Mutual algebraicity and cellularity. arXiv preprint arXiv:1911.06303 (2019)
Bulatov, A.A.: A dichotomy theorem for constraints on a three-element set. In: The 43rd Annual IEEE Symposium on Foundations of Computer Science, 2002. Proceedings, pp. 649–658. IEEE (2002)
Bulatov, A.A.: A dichotomy theorem for nonuniform CSPs. In: 2017 IEEE 58th Annual Symposium on Foundations of Computer Science (FOCS), pp. 319–330. IEEE (2017)
Chen, H.: The complexity of quantified constraint satisfaction: collapsibility, sink algebras, and the three-element case. SIAM J. Comput. 37(5), 1674–1701 (2008)
Feder, T., Vardi, M.Y.: The computational structure of monotone monadic SNP and constraint satisfaction: A study through datalog and group theory. SIAM J. Comput. 28(1), 57–104 (1998)
Hell, P., Nešetřil, J.: On the complexity of h-coloring. J. Comb. Theor. Ser. B 48(1), 92–110 (1990)
Hell, P., Nešetřil, J.: The core of a graph. Discret. Math. 109(1–3), 117–126 (1992)
Hodges, W., et al.: A shorter model theory. Cambridge University Press (1997)
Ladner, R.E.: On the structure of polynomial time reducibility. J. ACM (JACM) 22(1), 155–171 (1975)
Laskowski, M.C., et al.: Mutually algebraic structures and expansions by predicates. J. Symb. Log. 78(1), 185–194 (2013)
Mottet, A., Bodirsky, M.: A dichotomy for first-order reducts of unary structures. Logical Methods in Computer Science 14 (2018)
Zhuk, D.: A proof of csp dichotomy conjecture. In: 2017 IEEE 58th Annual Symposium on Foundations of Computer Science (FOCS), pp. 331–342. IEEE (2017)
Zhuk, D.: A proof of the CSP dichotomy conjecture. J. ACM (JACM) 67(5), 1–78 (2020)
Acknowledgement
Partially supported by NSF grant DMS-1855789. We thank the reviewers for their time and enlightening comments. The third author thanks the first two authors for their great advice.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendices
A Proof Details of Interesting Claims
1.1 A.1 Details of Section 3, Proposition 1 and Corollary 1
First, we show the details of the proof that if \(U=\{u(i)\}_{i<\omega }\) is ELG-SR, then CSP\((\mathbb {Z},\text {succ},U) \le ^p_TU\). On \(\mathfrak {D}=(D,\text {succ}^\mathfrak {D},U^\mathfrak {D})\), for each component \(\mathfrak {D}_e\):
-
1.
If \(D_e\cap U^\mathfrak {D}=\emptyset \), run CSP\((\mathbb {Z},\text {succ})\) decider on \((D_e,\text {succ}^\mathfrak {D}\cap D_e^2)\); if \(|D_e\cap U^\mathfrak {D}|=1\), run the CSP\((\mathbb {Z},\text {succ})\) algorithm beginning with assigning the unique \(d_e\in D_e\cap U^\mathfrak {D}\) to an arbitrary \(b\in U\).
Correctness follows from the observation that, in these cases we are still free to translate a \(\text {succ}\)-homomorphism as long as one exists.
-
2.
Now \(|D_e\cap U^\mathfrak {D}|\ge 2\). Since U is ELG, by definition there exists \(c\in \omega \) witnessing it, i.e. gaps in U are large after index c. Pick arbitrary \(d_e\in D_e\cap U^\mathfrak {D}\). Run the following:
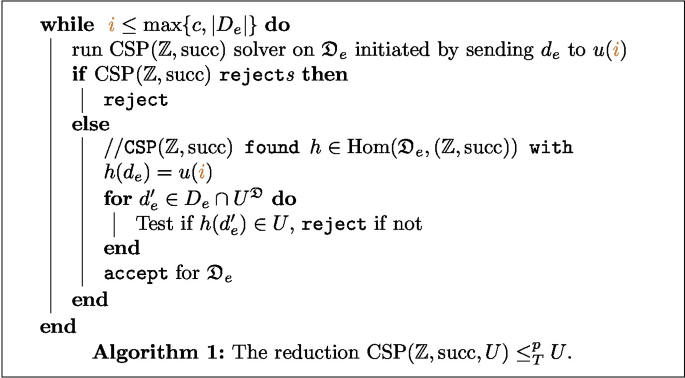
And \(\mathfrak {D}\) is accepted if and only if each \(\mathfrak {D}_e\) is accepted. To see efficiency: since U has SR, \(|\langle u(i)\rangle |\) is polynomial in i, and i is linear in \(|D_e|\le |D|\). If a \(\{\text {succ}\}\)-homomorphism h is found, we have polynomially many calls to the U-oracle; note that each \(h(d'_e)\in [u(i)-n,u(i)+n]\), so it remains polynomial size. The whole algorithm is therefore poly-calls to U with poly-overhead.
To see correctness, first observe the following fact: in a connected component of size n, for any vertices \(x\ne y\) the longest “signed path” (vertices \(x_0:=x,x_1,\dots , x_k:=y\) s.t. for each i, either \((x_i,x_{i+1})\in E\) or \((x_{i+1},x_i)\in E\)) has at most \(n-1\) edges, and the signed length (computed by adding 1 if \((x_i,x_{i+1})\in E\) and subtracting 1 if \((x_{i+1},x_i)\in E\)).Footnote 10 is at most \(n-1\). Whenever the component homomorphically maps to \((\mathbb {Z},\text {succ})\) via some h, the signed length of any signed path must be \(h(y)-h(x)\).
Now for any \(i>\max \{c,|D_e|\}\), \(|u(i)-*|>i>|D_e|\) for any \(*\in U\smallsetminus \{u(i)\}\), and with \(|D_e\cap U^\mathfrak {D}|\ge 2\), this gap is too big for there to exist a homomorphism sending \(d_e\) to u(i). In other words, \(\mathfrak {D}_e\in \) CSP\((\mathbb {Z},\text {succ},U)\iff \exists h\in \text {Hom}_{\text {succ}}(\mathfrak {D}_e,(\mathbb {Z},\text {succ},U))\) s.t. \(h(d_e)\in \{u(i)\}_{i\le \max \{|D_e|,c\}}\), which is what the algorithm checks.
As for the corollary claiming efficiency, note that the above has reduced CSP\((\mathbb {Z},\text {succ},U)\) to O(|D|)-many tests of whether each \(h(d'_e)\in U\). But this can be done by asking “is \(h(d'_e)=u(j)?\)” for each \(j\in [0,\max \{c,|D_e|\}+1]\)”. Both \(h(d'_e)\) and each u(j) are of size polynomial in |D|, thanks to SR and the connectedness of \(\mathfrak {D}_e\).

1.2 A.2 Details of Section 3, Theorem 1 and Corollary 2
Proof
(Section 3, Theorem 1). Again, thanks to EMLG one needs to shift a \(\text {succ}\)-homomorphism, if found, at most linearly many times, and SR bars exponential blow-ups.
Upon input \(\mathfrak {D}=(D,\text {succ}^\mathfrak {D},U_1^\mathfrak {D},\dots , U_k^\mathfrak {D})\), for each component \(\mathfrak {D}_e\):
-
1.
If \(|D_e\cap (\bigcup _jU_j^\mathfrak {D})|\le 1\), like in Proposition 1 the gaps within and across \(U_j\)’s make no impact on existence of homomorphisms. One just needs to run the CSP\((\mathbb {Z},\text {succ})\) decider / searcher starting with assinging \(d_e\) to an arbitrary \(b\in U_j,\) where \(U_j^ \mathfrak {D}\) is the unique unary intersecting \(D_e\) with \(d_e\) the unique intersection.
-
2.
Otherwise, let
 of the \(\le k+{k\atopwithdelims ()2}\) constants witnessing EMLG. Then for any \((j,l)\in k^2\), any
of the \(\le k+{k\atopwithdelims ()2}\) constants witnessing EMLG. Then for any \((j,l)\in k^2\), any
 , any
, any
 we have
we have
 . It follows that one needs at most \(O(|D_e|)\sim O(|D|)\) iterations, for
. It follows that one needs at most \(O(|D_e|)\sim O(|D|)\) iterations, for
 .
.Fix arbitrary \(d_e\in D_e\cap (\bigcup _jU_j^\mathfrak {D})\) before iterating. Within each iteration, run CSP\((\mathbb {Z},\text {succ}) \) assigning \(d_e\) to some u(n, y) where \(d_e\in D_e\cap U_y^\mathfrak {D}\), n is the iteration number (\(n\le \max (c,|D_e|))\). Since \(U_y\) has SR, u(n, y) has size polynomial in n, and n is linear in |D|. If a \(\text {succ}\)-homomophism h is found, verify whether \(h(d'_e)\in U_{y'}\) for each \(d'_e\in D_e\cap U_{y'}^\mathfrak {D}\). Via \(U_{y'}\le ^p_m\) (hence \(\le ^p_T\)) \(\varinjlim \nolimits _jU_j\), the decision of \(U_{y'}\)-membership of \(h(d'_e)\) reduces to calls to the \(\varinjlim \nolimits _jU_j\)-oracle. Note each \(h(d'_e)\in [u(n,y)-|D_e|,u(n,y)+|D_e|]\), so the reduction is of time polynomial w.r.t. |D|. \(\square \)
 of the
of the  , any
, any
 we have
we have
 . It follows that one needs at most
. It follows that one needs at most  .
.Proof
(Section 3,Corollary 2). As in Corollary 1, for each \(h(d'_e)\), ask if \(h(d'_e)=u(s,t)\) for each \(t\in [1,k]\) involved, \(s\in [0,\max \{c,|D_e|\}+1]\). By SR and connectedness, both \(h(d'_e)\) and each u(s, t) have size polynomial in |D|. \(\square \)
1.3 A.3 Details of Section 4, Proposition 2 and Corollary 3
Proof
(Section 4, Proposition 2). Upon each input \(\mathfrak {D}=(D,\text {succ}^\mathfrak {D},U^\mathfrak {D},\textbf{0}^\mathfrak {D})\), let \(\mathfrak {D}_0:=\) the unique component containing \(\textbf{0}^\mathfrak {D}\). Call CSP\((\mathbb {Z},\text {succ},U)\)-oracle on \(\mathfrak {D}\smallsetminus \mathfrak {D}_0\) and echo if rejects.
Call CSP\((\mathbb {Z},\text {succ})\)-solver on \((D_0,\text {succ}^\mathfrak {D}\cap D_0^2)\) initiated by sending \(\textbf{0}^\mathfrak {D}\) to 0, and echo if rejects; otherwise, the unique \(\text {succ}\)-homomorphism \(h:(D_0,\text {succ}^\mathfrak {D}\cap D_0^2)\rightarrow (\mathbb {Z},\text {succ})\) that satisfies \(h(\textbf{0}^\mathfrak {D})=0\) has been found, and one just needs to verify if for each d we have \(h(d)\in U\) by calling the U-oracle. Note each \(h(d)\in [0-|D_0|, 0+|D_0|]\) so input size remains polynomial in \(|D_0|\le |D|\).
The only oracles we called above are the U-oracles and CSP\((\mathbb {Z},\text {succ},U)\)-oracles, both of which Karp (hence Cook) reduces to the \(\varinjlim \)-oracle on RHS.
Proof
(Section 4,Corollary 3). If \(U\in \texttt{P}\), calls to the U-oracle counts as polynomial time overhead; if \(U\le ^p_T\) CSP\((\mathbb {Z},\text {succ},U)\), note the direct limit can be computed as \(\left\{ \begin{array}{cc} \chi _U(\frac{n-1}{2}) &{}\text { if }n=2k+1 \\ \chi _{\text {CSP}(\mathbb {Z},\text {succ},U)}(\frac{n}{2}) &{}\text {o.w.} \end{array}\right. \), where \(\chi _S(\bullet )\) is the membership function of set S, and \(\chi _U\) can be computed by computing \(\chi _{\text {CSP}(\mathbb {Z},\text {succ},U)}\) now at polynomial cost.
1.4 A.4 Details of Section 4, Theorem 2
Proof
Before going into the full details, we illustrate the reductions with the following example (Fig. 1):

Example of Theorem 2 Reduction
-
1.
\(\le ^p_m\): upon \((n,S_1,S_2)\), construct \(D:=\{1,\dots ,n\},\text {succ}^\mathfrak {D}=\emptyset , U^\mathfrak {D}:=D\). Then for each \((i<j)\in S_1\):
-
(a)
If \(S_2(i,j)>0\), add intermediate vertices and edges \(i=\big ((i,j),0\big ){\mathop {\longrightarrow }\limits ^{\text {succ}^\mathfrak {D}}} \big ((i,j),1\big ){\mathop {\longrightarrow }\limits ^{\text {succ}^\mathfrak {D}}} \dots {\mathop {\longrightarrow }\limits ^{\text {succ}^\mathfrak {D}}}\big ((i,j),S_2(i,j)\big )=j\).
-
(b)
If \(S_2(i,j)<0\), add intermediate vertices and edges \(i=\big ((i,j),0\big ){\mathop {\longleftarrow }\limits ^{\text {succ}^\mathfrak {D}}} \big ((i,j),1\big ){\mathop {\longleftarrow }\limits ^{\text {succ}^\mathfrak {D}}} \dots {\mathop {\longleftarrow }\limits ^{\text {succ}^\mathfrak {D}}}\big ((i,j),|S_2(i,j)|\big )=j\).
-
(c)
if \(S_2(i,j)=0\), collapse vertices \(i\sim j\) (so now the “vertex classes” \({[i]} = {[j]})\).
Now \(D=\Big \{[1],\dots , [n]\Big \}\cup \Big \{\big ((i,j),m\big )\Big \}_{ S_2(i,j)\ne 0,m\in [1,|S_2(i,j)|-1]}\) and \(U^\mathfrak {D}=\Big \{[1],\dots , [n]\Big \}\). Note \(|D|\le n+n\times {n\atopwithdelims ()2}\), and as \(S_1\) is part of the tuple, |D| is polynomial in \(|\langle (n,S_1,S_2)\rangle |\), so \((n,S_1,S_2)\mapsto \mathfrak {D}=(D,\text {succ}^\mathfrak {D},U^\mathfrak {D})\) is a polynomial-time construction. Further,
-
(a)
If \((n,S_1,S_2)\in \) Gap(U) witnessed by \(t\in U^n\), let \(h:D\rightarrow \mathbb {Z}\), \([j]\mapsto t(j)\) (\(j\in [1,n]\)) and extend naturally to the intermediates, i.e. \(\big ((i,j),m\big )\mapsto t(i)+\) sign\((S_2(i,j))\times m\). The map puts \(\mathfrak {D}\in \) CSP\((\mathbb {Z},\text {succ},U)\).
-
(b)
If \(\mathfrak {D}\in \) CSP\((\mathbb {Z},\text {succ},U)\) by h, then \(\big (t(i)=h([i])\big )_{i\in [1,n]} \) witnesses \((n,S_1,S_2)\in \) Gap(U).
-
(a)
-
2.
\(_m^p\ge \): Observe that \(s_1:=\Big (3,{3\atopwithdelims ()2}, \big (\underbrace{1}_{(1,2)},\underbrace{3}_{(1,3)}, \underbrace{1}_{(2,3)}\big )\Big )\notin \) Gap(U) due to triangle-inequality, and taking arbitrary \(u_1\ne u_2\in U\) (not \(U^\mathfrak {D}\)), \(s_2:=\Big (2, \big \{(1,2)\big \}, \big (u_2-u_1\big )\Big )\in \) Gap(U). \(s_1,s_2\) are input-independent.
Now let \(\mathfrak {D}=(D,\text {succ}^\mathfrak {D},U^\mathfrak {D})\). We want to produce a short tuple \(s_\mathfrak {D}=(n,S_1,S_2)\) in time polynomial in |D|. We present an algorithm for that.
-
(a)
Run CSP\((\mathbb {Z},\text {succ})\) decider/searcher on \(\mathfrak {D}\), and halt setting \(s_\mathfrak {D}:=s_1\) if reject was returned; else, we obtain an \(h\in \text {Hom}_{\text {succ}}\big ((D,\text {succ}^\mathfrak {D}),(\mathbb {Z},\text {succ})\big )\) from the run.
-
(b)
Throw away the components \(\mathfrak {D}_e\) with \(|D_e\cap U^\mathfrak {D}|\le 1\), keeping \(\mathfrak {D}':=\coprod _{e:|D_e\cap U^\mathfrak {D}|\ge 2}\mathfrak {D}_e\). If \(\mathfrak {D}'=\emptyset \), halt setting \(s_\mathfrak {D}:=s_2\).
-
(c)
Let \(n:=|U^\mathfrak {D}\cap D'|\); now \(n\in [2,|D'|]\). Enumerate elements in \(U^\mathfrak {D}\cap D'\) as \(v_1,\dots , v_n\); let \(S_1:=\{(i<j): v_i,v_j\text { are from the same component }\}\). Let \(S_2(i,j):=h(v_j)-h(v_i)\) with h from Step 2a. Let \(s_\mathfrak {D}:=\langle (n,S_1,S_2)\rangle \).
\(s_\mathfrak {D}\) has size polynomial in |D| and the algorithm is efficient. Correctness:
-
(a)
Assume \(\mathfrak {D}\in \) CSP\((\mathbb {Z},\text {succ},U)\) witnessed by \(h'\), then \(s_\mathfrak {D}\ne s_1\) for \(h'\in \text {Hom}_{\text {succ}}\big ((D,\text {succ}^\mathfrak {D}),\) \((\mathbb {Z},\text {succ})\big )\) and the CSP\((\mathbb {Z},\text {succ})\)-decider should’ve caught a homomorphism.
-
If \(\mathfrak {D}'\ne \emptyset \): for each \(v_i\ne v_j\) from the same component in \(\mathfrak {D}'\), \(h'(v_j)-h'(v_i)=h(v_j)-h(v_i)\). Therefore setting \(t_i=h'(v_i)\) for each \(i\in [1,n]\), we get a witness for \((n,S_1,S_2)\in \) Gap(U).
-
If \(\mathfrak {D}'=\emptyset \), we exited with an \(s_2\in \) Gap(U).
-
-
(b)
Assume \(s_\mathfrak {D}\in \) Gap(U), then again \(s_\mathfrak {D}\ne s_1\).
-
If \(s_\mathfrak {D}=s_2\) then the h from Step 2a translates componentwise and then patches to a \(\{\text {succ},U\}\)-homomorphism.
-
otherwise there exists \(t\in U^n\) with \(t(j)-t(i)=S_2(i,j)\) \((\forall (i<j)\in S_1)\). Each component in \(\mathfrak {D}'\) contains a \(v_{i_e}\in U^\mathfrak {D}\cap D'\); shift \(h\restriction _{\mathfrak {D}_e}\) s.t. \(h(v_{i_e})=t(i_e)\). Now for each \(v_{j_e}\ne v_{i_e}\in D_e\cap U^\mathfrak {D}\), \(h(v_{j_e})=h(v_{i_e})+S_2(i_e,j_e)=t(j_e)\in U\). Do so for each component of \(\mathfrak {D}'.\)
Lastly for each component in \(\mathfrak {D}\smallsetminus \mathfrak {D}'\), shift h if need be. \(\square \)
-
-
(a)
1.5 A.5 Details of Section 5, Fact 3 and Proposition 4
We first prove the folklore / exercise in Sect. 5, Fact 3, conceptually by mimicing the Search to Decision reduction for SAT. As in graphs, a core \(\mathfrak {B}\subset _{\text {ind}}\mathfrak {A}\) is a minimal image of endomorphisms, i.e. there exists no \(\sigma \in \text {End}{(\mathfrak {A})}\) s.t. \(\sigma (\mathfrak {A})\subsetneq \mathfrak {B}\). For finite \(\mathfrak {A}\)’s, cores always exist and are unique up to isomorphism [3]. are isomorphic,Footnote 11 so hereinafter we talk about “the” core of \(\mathfrak {A}\).
Let \(\mathfrak {B}\) be the core of \(\mathfrak {A}\), then inclusion \(\mathfrak {B}\hookrightarrow \mathfrak {A}\) and the definitional endomorphism \(\mathfrak {A}\rightarrow \mathfrak {B}\) shows homomorphic equivalence of \(\mathfrak {A}\) and \(\mathfrak {B}\), so it suffices to show SEARCH-CSP\((\mathfrak {A})\le ^p_T\) CSP\((\mathfrak {B})\).Footnote 12
To make the description less cumbersome let’s define POINTED-CSP: fix arbitrary \(b\in B\). POINTED-CSP\((\mathfrak {B},b)\) takes a pair \((\mathfrak {D},d)\) with \(\mathfrak {D}\) a finite \(\tau \)-structure, \(d\in D\), and returns \(\texttt{1}\) iff there exists \(h\in \text {Hom}_\tau (\mathfrak {D},\mathfrak {B})\) s.t. \(h(d)=b\).
Claim: POINTED-CSP\((\mathfrak {B},b)\le ^p_m\) (hence \(\le ^p_T\)) CSP\((\mathfrak {B})\).
Proof
(Proof of Claim). Upon a POINTED-CSP\((\mathfrak {B},b)\) input \((\mathfrak {D},d)\), let \(\widetilde{\mathfrak {D}}:=\dfrac{\mathfrak {D}\cup \mathfrak {B}}{b\sim d}\).Footnote 13. This is a polynomial time construction since \(|B|\sim O(1)\). I claim \((\mathfrak {D},d)\in \ \text {POINTED-CSP}(\mathfrak {B},b)\iff \widetilde{\mathfrak {D}}\in \) CSP\((\mathfrak {B})\).
-
1.
\(\implies \): let \(h:(\mathfrak {D},d)\rightarrow (\mathfrak {B},b)\) be a basepoint-preserving homomorphism. Then \(\widetilde{h}:\widetilde{\mathfrak {D}}\rightarrow \mathfrak {B}, h(x):=\left\{ \begin{array}{cc} h(x), &{} \text { if }x\in D \\ x, &{} \text { o.w.} \end{array}\right. \) is a homomorphism.
-
2.
 : let \(h:\widetilde{\mathfrak {D}}\rightarrow \mathfrak {B}\) be a homomorphism. Then \(h\vert _{\mathfrak {B}}:\mathfrak {B}\rightarrow \mathfrak {B}\) is an endomorphism of the finite core \(\mathfrak {B}\). Since an endomorphism of a core is an automorphism,Footnote 14 there exists \(\sigma \in \text {Aut}{(\mathfrak {B})}=\text {End}{(\mathfrak {B})}\) s.t. \(\sigma \circ (h\vert _{\mathfrak {B}})=1_{\mathfrak {B}}\). Now \(\sigma \circ (h\vert _{\mathfrak {D}})\) is a homomorphism \(\mathfrak {D}\rightarrow \mathfrak {B}\) sending d to \(\sigma (h([d]))=\sigma (h([b]))=b\), which is the desired witness.
: let \(h:\widetilde{\mathfrak {D}}\rightarrow \mathfrak {B}\) be a homomorphism. Then \(h\vert _{\mathfrak {B}}:\mathfrak {B}\rightarrow \mathfrak {B}\) is an endomorphism of the finite core \(\mathfrak {B}\). Since an endomorphism of a core is an automorphism,Footnote 14 there exists \(\sigma \in \text {Aut}{(\mathfrak {B})}=\text {End}{(\mathfrak {B})}\) s.t. \(\sigma \circ (h\vert _{\mathfrak {B}})=1_{\mathfrak {B}}\). Now \(\sigma \circ (h\vert _{\mathfrak {D}})\) is a homomorphism \(\mathfrak {D}\rightarrow \mathfrak {B}\) sending d to \(\sigma (h([d]))=\sigma (h([b]))=b\), which is the desired witness.
 : let
: let Analogously if we define a m-POINTED-CSP(\(\mathfrak {B},b_1,\dots ,b_m\)) it also Karp-reduces to CSP\((\mathfrak {B})\), the reduction being \((\mathfrak {D},d_1,\dots ,d_m)\rightsquigarrow \widetilde{\mathfrak {D}}:=\dfrac{\mathfrak {D}\cup \mathfrak {B}}{\{d_i\sim b_i\}_{i\in [1,m]}}\).Footnote 15
An algorithm that calls the CSP\((\mathfrak {B})\)-oracle to solve SEARCH-CSP\((\mathfrak {A})\) therefore goes as:

Algorithm 2 finds a full homomorphism \(\mathfrak {D}\rightarrow \mathfrak {B}\) \(\iff \mathfrak {D}\in \) CSP\((\mathfrak {B})=\) CSP\((\mathfrak {A})\) so it solves SEARCH-CSP\((\mathfrak {A})\); furthermore it calls the CSP\((\mathfrak {B})\)-oracle O(nk) times. \(\implies \) is by definition, and to see
 , note that the existence of an \(h:\mathfrak {D}\rightarrow \mathfrak {B}\) means for each \(i\in [1,|D|]\) there exists some \(j\in [1,|B|]\) s.t. \(h(d_i)=b_j\), i.e. the existence of an accepting path.Footnote 16 \(\square \)
, note that the existence of an \(h:\mathfrak {D}\rightarrow \mathfrak {B}\) means for each \(i\in [1,|D|]\) there exists some \(j\in [1,|B|]\) s.t. \(h(d_i)=b_j\), i.e. the existence of an accepting path.Footnote 16 \(\square \)
Next,
Proof
(Proposition 4).
As before, decompose \(\mathfrak {D}=(D,E^\mathfrak {D},U^\mathfrak {D},\textbf{0}^\mathfrak {D})\) into connected components and let the CSP\(( \mathfrak {A})\) handle the non central components.
For the central component, call SEARCH-CSP( \({\mathfrak {A}^\downarrow }[{A^\downarrow }_0]\)) oracle, which thanks to \(|{A^\downarrow }_0|<\aleph _0\) and Fact 3 Cook reduces to CSP\(( {\mathfrak {A}^\downarrow }[{A^\downarrow }_0])\). If we found an \(h\in \text {Hom}_E((D,E^\mathfrak {D}),{\mathfrak {A}^\downarrow }[{A^\downarrow }_0])\), by the assumption, all \(h'\in \text {Hom}_E((D,E^\mathfrak {D}),{\mathfrak {A}^\downarrow }[{A^\downarrow }_0])\) is of the form \(\sigma h\) for different \(\sigma \)’s in \(\text {End}_{E}({\mathfrak {A}^\downarrow }[{A^\downarrow }_0])\).
Note that \(|{A^\downarrow }_0|<\aleph _0\implies |\text {End}_{E}({\mathfrak {A}^\downarrow }[{A^\downarrow }_0])|\le |{A^\downarrow }_0|^{|{A^\downarrow }_0|}< \aleph _0\) and \(|\text {End}_{E}({\mathfrak {A}^\downarrow }[{A^\downarrow }_0])|\) is input-independent. Each \(\sigma _i\in |\text {End}_{E}({\mathfrak {A}^\downarrow }[{A^\downarrow }_0])|\) is a finite domain function, whose encoding is also input-independent. For each of the O(1)-many \(\sigma _i\in |\text {End}_{E}({\mathfrak {A}^\downarrow }[{A^\downarrow }_0])|\), compute \(\sigma _i h\) (Since \(\sigma _i\) is input-independent and \({A^\downarrow }_0\) is constant-sized, time and space cost is dominated by computing h, which is again dominated by the oracle call to CSP(\({\mathfrak {A}^\downarrow }[{A^\downarrow }_0])\)); then check if \(\sigma _ih\) preserves \(\textbf{0}^\mathfrak {D}\) in O(1) time and if \(\sigma _ih\) preserves the unary by calling the U-oracle. \(\square \)
B Diagrams Summarizing Main Results
1.1 B.1 For Section 4

Bounds and Equivalences of CSP\((\mathbb {Z},\text {succ},U)\)
1.2 B.2 For Section 5

Results for \(\mathfrak {A}:=(\mathbb {Z},E,U)\),\(\mathfrak {{\mathfrak {A}^\downarrow }}:=(\mathbb {Z},E)\). Recall \({\mathfrak {A}^\downarrow }_0\) is the \(\textbf{0}\)-component of \(({\mathfrak {A}^\downarrow },\textbf{0})\) , and \({A^\downarrow }_0\) its domain.
C Detailed Verification of Miscellaneous Claims
1.1 C.1 Full Details of Section 3, Observation 1
We give more details on the polynomial-time algorithm. Modify the greedy algorithm that determines if an input \(G\in \) CSP\((\mathbb {Z},\text {succ})\). For each component \(\mathfrak {D}_e\subseteq \mathfrak {D}=(D,\text {succ}^\mathfrak {D},U^\mathfrak {D})\), if \(D_e\cap U^\mathfrak {D}=\emptyset \), run the CSP\((\mathbb {Z},\text {succ})\) decider on \(\mathfrak {D}_e\); otherwise pick an arbitrary \(d_e\in U^\mathfrak {D}\cap D_e\), then run the greedy CSP\((\mathbb {Z},\text {succ})\) algorithm on \(\mathfrak {D}_e\) initiated by mapping \(d_e\) to b. When the algorithm accepts, it yields a \(\{\text {succ}\}\)-homorphism \(h_e: (D,\text {succ}^\mathfrak {D})\rightarrow (\mathbb {Z},\text {succ})\); accepts on this component only if \(h_e(d'_e)\in U\) for each \(d'_e\in U^\mathfrak {D}\cap D_e\). Accept \(\mathfrak {D}\) only if all components accept.
If the algorithm above accepts, obviously each \(h_e\) is a \(\{\text {succ},U\}\)-homomorphism; conversely if \(\mathfrak {D}\in \) CSP\((\mathbb {Z},\text {succ},U)\), so is each component \(\mathfrak {D}_e\). Hence there exists some homomorphism \(h_e\) sending \(d_e\) to some \(x\in b+a\mathbb {Z}\). Now Aut\((\mathbb {Z},\text {succ},U)\cong \mathbb {Z}\) composes of translations by ak (\(k\in \mathbb {Z}\)), so there exists \(h'_e\in \text {Hom}_{\text {succ},U}(\mathfrak {D}_e,(\mathbb {Z},\text {succ},U))\) sending \(d_e\) to b, which is the one affording acceptance of \(\mathfrak {D}_e\).
1.2 C.2 Section 3 Equation 1 Gives the L.U.B. in Karp-Order
To see that \(\varinjlim \nolimits _jU_j\) defined as above is indeed the least upper bound, observe that each \(U_r\le ^p_m\varinjlim \nolimits _jU_j\) via \(m\mapsto mk+(r\mod k)\), and if \(Q\subseteq \mathbb {Z}\) is s.t. \(U_r\le ^p_mQ\) via \(f_r\) for each \(r\in [k]\), then \(\varinjlim \nolimits _jU_j\le ^p_mQ\) via \(x\mapsto f_{r}(\frac{x-(x\mod k)}{k}) \) where \(r=\left\{ \begin{array}{cc} x\mod k &{} \text { if } k\not \mid x \\ k &{} \text {o.w.} \end{array}\right. \)
1.3 C.3 More Discussion on \(\text {Diff}_d\)
Proof
(details of Section 5, Observation 2).
-
1.
For each component \(\mathfrak {D}_e\) s.t. \(\textbf{0}^\mathfrak {D}\notin \mathfrak {D}_e\), call the CSP\((\mathbb {Z},\text {succ},U)\)-oracle, which reduces to the \(\varinjlim \big \{U,\) CSP\((\mathbb {Z},\text {Diff}_d,U)\big \}\)-oracle.
-
2.
For the unique component \(\mathfrak {D}_0\ni \textbf{0}^\mathfrak {D}\), run the greedy, efficient SEARCH-CSP\((\mathbb {Z},\text {Diff}_d)\) algorithm to decide if there is a (unique) \(\{\text {Diff}_d,\textbf{0}\}\)-homomorphism h. Reject if none found.
Having found h, for each \(u\in U^\mathfrak {D}\cap D_0\), call U-oracle on h(u). Note that \(h(u)\in [-|D|,|D|]\) and the oracle call once again reduces to calling \(\varinjlim \big \{U,\) CSP\((\mathbb {Z},\text {Diff}_d,U)\big \}\).
Other interesting properties of CSP\((\mathbb {Z},\text {Diff}_d,U)\) may be said. For example:
-
1.
One may define eventually (mutually) d-largely gapped \(\big (\underline{E(M)LG_d}\big )\) analogously to Definitions 1, 3, changing “
 ” into “
” into “
 ”. Keeping the definition of SR (2) unchanged, we have CSP\((\mathbb {Z},\text {Diff}_d,U)\le ^p_TU\) when ELG\(_d\)-SR, and CSP\((\mathbb {Z},\text {Diff}_d,\boldsymbol{U})\le ^p_T\varinjlim \boldsymbol{U}\) when EMLG\(_d\)-SR.
”. Keeping the definition of SR (2) unchanged, we have CSP\((\mathbb {Z},\text {Diff}_d,U)\le ^p_TU\) when ELG\(_d\)-SR, and CSP\((\mathbb {Z},\text {Diff}_d,\boldsymbol{U})\le ^p_T\varinjlim \boldsymbol{U}\) when EMLG\(_d\)-SR. -
2.
Note that \(\text {Aut}(\mathbb {Z},\text {Diff}_d)\cong S_d\times (d\mathbb {Z})^d\cong S_d\times \mathbb {Z}^d\) as groups: indeed, an automorphism permutes the components and then shifts on each component by a distance in \(d\mathbb {Z}\).
 ” into “
” into “
 ”. Keeping the definition of SR (
”. Keeping the definition of SR (1.4 C.4 Figure 4 Disproves Converse of Proposition 3(1)
We show that the converse of Proposition 3(1) is not true; in fact, even \(\big (\text {End}_{{E,\textbf{0}}}( {\mathfrak {A}^\downarrow }_0)=\{\textbf{1}\}\big )+\) FT
 PHR.Footnote 17 We claim that Fig. 4 below has \(\big (\text {End}_{{E,\textbf{0}}}( {\mathfrak {A}^\downarrow }_0)=\{\textbf{1}\}\big )+\) FT but no PHR: \(\mathfrak {D}\) embeds in \(({\mathfrak {A}^\downarrow },\textbf{0})\) in 2 ways.
PHR.Footnote 17 We claim that Fig. 4 below has \(\big (\text {End}_{{E,\textbf{0}}}( {\mathfrak {A}^\downarrow }_0)=\{\textbf{1}\}\big )+\) FT but no PHR: \(\mathfrak {D}\) embeds in \(({\mathfrak {A}^\downarrow },\textbf{0})\) in 2 ways.

Counter example \({\mathfrak {A}^\downarrow }\)
We verify that Fig. 4 has \(\big (\text {End}_{{E,\textbf{0}}}( {\mathfrak {A}^\downarrow }_0)=\{\textbf{1}\}\big )+\) FT yet no PHR. Without naming the constant, each vertex has in-degree 2 and out-degree 2, so any translation is an \(\{E\}\)-endomorphism — in fact even an automorphism, yielding FT. Furthermore, after naming \(\textbf{0}^\mathfrak {A}:=0\), its predecessors and successors are fixed: let \(\sigma \in \text {End}_{E,\textbf{0}}({\mathfrak {A}^\downarrow },\textbf{0})\). \(\sigma (2),\sigma (1)\in \{2,1\}\) yet if \(\sigma (2)=1,\) neither \(\sigma (1)=1\) nor \(\sigma (1)=2\) would give \(E^\mathfrak {A}(\sigma (1),\sigma (2))\). It follows that \(\sigma (2)=2\). Likewise, \(\sigma (\pm 1)=\pm 1\) and \(\sigma (-2)=-2\). For \(|n|\ge 3\), \(\sigma (n)=n\) follows from induction. The fact that vertices further away are fixed follow from induction, so \(\text {End}_{ E,\textbf{0}}({\mathfrak {A}^\downarrow }_0)=\text {End}_{ E,\textbf{0}}({\mathfrak {A}^\downarrow },0)=\{1\}\). On the other hand,
 embeds into both
embeds into both
 and
and
 .
.
Remark 1
One might also want to note that a claim stronger than Prop. 3(1), that PHR \(\implies \) End
 , is also false. Consider \( {\mathfrak {A}^\downarrow }:=(\mathbb {Z};E,\textbf{0}:=0)\) with edges defined as
, is also false. Consider \( {\mathfrak {A}^\downarrow }:=(\mathbb {Z};E,\textbf{0}:=0)\) with edges defined as

Any connected finite \(\{E,\textbf{0}\}\)-structure must homomorphically map to the non-negative, so a \(\{E,\textbf{0}\}\)-homomorphism exists iff \(\mathfrak {D}\) is loopless, directed acyclic, and each vertex has a non-negative signed distance from \(\textbf{0}^\mathfrak {D}\) (i.e. never “\(a\rightarrow \textbf{0}^\mathfrak {D}\)”). Each \(\{E,\textbf{0}\}\)-homomorphism from such \(\mathfrak {D}\)’s should it exist, must be unique, mapping each vertex to its distance from \(\textbf{0}^\mathfrak {D}\). However \(\text {End}_{\{E,\textbf{0}\}}{(({\mathfrak {A}^\downarrow },\textbf{0}))}\) contains swapping \(-4\leftarrow -3\) with \(-2\leftarrow -1\).
1.5 C.5 Definition of Connectedness in General Case (Re. Comments at Beginning of Section 5)
One may even have freedoms on the arities of the non unaries \(\{E_j\}_j\). In these cases, call \(x,y\in \mathbb {Z}\) “connected” if
-
1.
(Base) there exists some \(j\in [1,k]\) s.t. \((\dots ,x,\dots ,y,\dots )\) or \((\dots ,y,\dots ,x,\dots )\in E_j^\mathfrak {D}\). OR
-
2.
\(\exists z\) s.t. x, z are connected and z, y are connected.
Call \(\mathfrak {D}'\subset _{\text {ind }}\mathfrak {D}\) a connected component of \(\mathfrak {D}\) if for any \(x\ne y\in \mathfrak {D}',\) x and y are connected; and \(\forall x\in \mathfrak {D}'\), \(\forall z\notin \mathfrak {D}'\), x, z are not connected. (This happens if and only if the Gaifman graph of \(\mathfrak {D}'\) is a connected component of the Gaifman graph of \(\mathfrak {D}\).) Vacuously, an isolated vertex (an \(x\in D\) that does not appear in any \(E_j^\mathfrak {D}\) with arity \(\ge 2\)) is a connected component.
A \(\{E_j, \textbf{c}\}_{j\in [1,k]}\)-structure \(\mathfrak {D}\) is connected if \(\mathfrak {D}\) itself is a connected component; equivalently, \(\mathfrak {D}\) is not the disjoint union of two or more connected components.
A notable property relevant to later discussion: when a finite, connected \(\{E_j \}_{j\in [k]}\)-structure \(\mathfrak {D}\) has \((E_j^\mathfrak {D}=\emptyset )_{j\in [k]}\) then \(|\text {Hom}_{ \{E_j\}_{j\in [k]},\textbf{c}}(\mathfrak {D},(\mathbb {Z}, (E_j^\mathfrak {A})_j,\textbf{c}^\mathfrak {A}))|=1\) for free, because \(D=\{\textbf{c}^\mathfrak {D}\}\) in this case: \(\textbf{c}^\mathfrak {D}\) is its own connected component and \(\mathfrak {D}\) is connected.
1.6 C.6 Verification of Corollary 4
Proof
With assumption set 1, by \(U\in \texttt{P}\) and CSP\(({\mathfrak {A}^\downarrow })\le ^p_m\) CSP\((\mathfrak {A})\), all other terms in the direct limit are reduced to CSP\((\mathfrak {A})\). Likewise for assumption set 2.
1.7 C.7 Remark on Further Generalizing Sect. 5
-
1.
The converses of Proposition 2-type reductions, i.e. \((\mathbb {Z},E,U)\le ^p_m(\mathbb {Z},E,U,\textbf{0})\), always hold by the identity reduction (as pp-sentence).Footnote 18
-
2.
All arguments in Theorem 3 to Proposition 4 generalize to \((\mathbb {Z},\boldsymbol{E},\boldsymbol{U})\), i.e. with finitely many binaries and finitely many unaries; \(\textbf{0}\) may be changed to \(\textbf{c}\) for any \(\textbf{c}\in \mathbb {Z}\). In these general cases we need a careful definition of connected components , and the arguments would be longer, but still completely analogous. For the ease of presentation, we assume our current presentation.
1.8 C.8 More Discussion on Future Directions
Section 1, we believe these are solid first steps towards characterizing the CSP of non-\(\omega \)-categorical binary structures. In fact, one meaningful subclass of non-\(\omega \)-categorical structures where \((\mathbb {Z},\text {succ},U)\) lives is those that are mutually algebraic (e.g. [12, 21]) ones, which also include all \(\mathfrak {A}=(\mathbb {Z},E,U)\)’s where the underlying \({\mathfrak {A}^\downarrow }\) has (universally) bounded degree. Hence one may ask:
Problem 4
Let \({\mathfrak {A}^\downarrow }=(\mathbb {Z},E)\) be of degree \(d\ge 2\), i.e. \(\deg _{\mathfrak {A}^\downarrow }(v)\le d\) for any \(v\in \mathbb {Z}\).
-
1.
Is CSP\(({\mathfrak {A}^\downarrow })\) either in \(\texttt{P}\) or in \(\texttt{NPC}\)? If not, are there meaningful dividing lines for tractability at least?
-
2.
Can we fully characterize the complexity of CSP\((\mathbb {Z},E,U)\) \((U\subseteq \mathbb {Z})\) now that we further restricted the underlying E by degree?
Some facts to bear in mind: that in general it is not true that the CSP of infinite digraphs have a P-NPC dichotomy [3, 4].Footnote 19 On the other hand, for any \(d\ge 2\) the disjoint union of all (isomorphic types of) finite undirected graph of degree \(\le 2\) has the same CSP as \(K_{d+1}\), by e.g. Brook’s theorem.
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Gasarch, W., Laskowski, M., Zhu, S. (2022). \((\mathbb {Z},\text {succ},U), (\mathbb {Z},E,U)\), and Their CSP’s. In: Du, DZ., Du, D., Wu, C., Xu, D. (eds) Theory and Applications of Models of Computation. TAMC 2022. Lecture Notes in Computer Science, vol 13571. Springer, Cham. https://doi.org/10.1007/978-3-031-20350-3_14
Download citation
DOI: https://doi.org/10.1007/978-3-031-20350-3_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-20349-7
Online ISBN: 978-3-031-20350-3
eBook Packages: Computer ScienceComputer Science (R0)