
Abstract
The purpose of this study is to optimize the design of racing wheelchairs to improve the performances of the athletes. The design of manual wheelchair allows athletes to express their full potential. Two models have then been created. The first one to compute the optimal position of the shoulder of the athlete relatively to the wheelchair to obtain the maximal wheelchair speed for long distance races. The second one was designed to represent the 100 m race and to optimize the pelvis position of the athlete on the wheelchair to reduce the time to reach 100 m. Our model quantified the maximal speed reached by the wheelchair to 32 km/h and the optimal time to 14.35 s. To obtain these performances, the athlete would be in a lying position, with the vertical position of the pelvis centre close to the vertical position of the shoulder. The second program also returned the optimal speed curve of the wheelchair during the 100 m race. The coaches could then use the optimal acceleration curve found in this study to match the acceleration of the wheelchair of their athlete.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Bundon, A., Mason, B.S., Goosey-Tolfrey, V.L.: Expert users’ perceptions of racing wheelchair design and setup: the knowns, unknowns, and next steps. Adapt. Phys. Act. Q. 34(2), 141–61 (2017). https://journals.humankinetics.com/view/journals/apaq/34/2/article-p141.xml
Mason, B.S., van der Woude, L.H.V., Goosey-Tolfrey, V.L.: The ergonomics of wheelchair configuration for optimal performance in the wheelchair court sports. Sport. Med. 43(1), 23–38 (2013). https://www.scopus.com/inward/record.uri?eid=2-s2.0-84873125920&doi=10.1007%2Fs40279-012-0005-x&partnerID=40&md5=f984184907b46f0696f61c0c3cfad544
MacLeish, M.S., Cooper, R.A., Harralson, J., Ster, J.F.: Design of a composite monocoque frame racing wheelchair. J. Rehabil. Res. Dev. 30(2), 233–249 (1993)
Cooper, R.A.: Wheelchair racing sports science: a review. J. Rehabil. Res. Dev. 27(3), 295–312 (1990)
Cooper, R.A., et al.: Engineering and technology in wheelchair sport. Phys. Med. Rehabil. Clin. N. Am. 29(2), 347–369 (2018)
Mâsse, L.C., Lamontagne, M., O’Riain, M.D.: Biomechanical analysis of wheelchair propulsion for various seating positions. J. Rehabil. Res. Dev. 29(3), 12–28 (1992). https://doi.org/10.1682/jrrd.1992.07.0012
Hybois, S.: Approche numérique pour l’optimisation personnalisée des réglages d’un fauteuil roulant manuel. Arts et Metiers Paristech - Campus de Paris, Institut de Biomécanique Humaine Georges Charpak (2019)
Morrow, D.A., Guo, L.Y., Zhao, K.D., Su, F.C., An, K.N.: A 2-D model of wheelchair propulsion. Disabil. Rehabil. 25(4–5), 192–196 (2003)
Sauret, C., Loisel, J., Poulet, Y., Bascou, J.: Performance analysis of wheelchair racing using IMU sensors. In: 19ème congrès ACAPS, Montpellier, France, 27–29 October 2021 (2021)
Masson, G.: Amélioration des performances d’athlètes en fauteuil roulant d’athlétisme à partir d’une configuration optimale (2015)
Samozino, P., et al.: A simple method for measuring power, force, velocity properties, and mechanical effectiveness in sprint running. Scand. J. Med. Sci. Sport. 26(6), 648–658 (2016)
Mayer, F., Horstmann, T., Rocker, K., Heitkamp, H.C., Dickhuth, H.H.: Normal values of isokinetic maximum strength, the strength/velocity curve, and the angle at peak torque of an degrees of freedom in the shoulder. Int J Sports Med. 15(Suppl. 1), 19–25 (1994)
Provins, K.A., Salter, N.: Maximum torque exerted about the elbow joint. J. Appl. Physiol. 7(4), 393–398 (1955)
Colson, S., Pousson, M., Martin, A., Van Hoecke, J.: Isokinetic elbow flexion and coactivation following eccentric training. J. Electromyogr. Kinesiol. 9(1), 13–20 (1999)
Chénier, F., Pelland-Leblanc, J.-P., Parrinello, A., Marquis, E., Rancourt, D.: A high sample rate, wireless instrumented wheel for measuring 3D pushrim kinetics of a racing wheelchair. Med. Eng. Phys. 87, 30–37 (2021). https://www.scopus.com/inward/record.uri?eid=2-s2.0-85096702517&doi=10.1016%2Fj.medengphy.2020.11.008&partnerID=40&md5=f9f0053e65b1fad0b7a61994a2cdf436
Bourgain, M., Hybois, S., Thoreux, P., Rouillon, O., Rouch, P., Sauret, C.: Effect of shoulder model complexity in upper-body kinematics analysis of the golf swing. J. Biomech. 75, 154–158 (2018). https://doi.org/10.1016/j.jbiomech.2018.04.025
Kirby, R.L., Kirby, R.L., Smith, C., Seaman, R., Macleod, D.A., Parker, K.: The manual wheelchair wheelie: A review of our current understanding of an important motor skill. Disabil. Rehabil. Assist. Technol. 1(1–2), 119–127 (2006). https://doi.org/10.1080/09638280500167605
Acknowledgments
This work has benefited funds managed by the National Research Agency (ANR) under the “Future Investment 3” plan within the framework of the “Priority Sport Research Program of Very High Performance” bearing the reference ANR–19-STHP-0005.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Annex
Annex
The formulas used to compute the kinematic parameters of the model are presented in this annex. This allowed us to find the shoulders and elbow angles.
The first step to calculate the kinematics parameters of the Long-distance model was based on the current position of the shoulder centre (\({X}_{shoulder}\) and \({Y}_{shoulder}\) respectively the horizontal and vertical position):
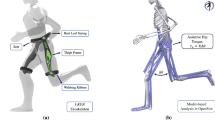
For the sprint model, the first step to compute the kinematic parameters was based on the dimension of the torso (\({L}_{torso}\)), the horizontal and vertical position of the pelvis (respectively \({X}_{pelvis}\) and \({Y}_{pelvis}\)), and \(\beta \), the angle between the torso and a horizontal line (figure attached).
Then, the next step was the same for both models. The parameters used were: \(\alpha \), the

Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Loiseau, A., Marsan, T., Navarro, P., Watier, B., Landon, Y. (2023). Optimizing Racing Wheelchair Design Through Coupled Biomechanical-Mechanical Simulation. In: Gerbino, S., Lanzotti, A., Martorelli, M., Mirálbes Buil, R., Rizzi, C., Roucoules, L. (eds) Advances on Mechanics, Design Engineering and Manufacturing IV. JCM 2022. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-15928-2_52
Download citation
DOI: https://doi.org/10.1007/978-3-031-15928-2_52
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-15927-5
Online ISBN: 978-3-031-15928-2
eBook Packages: EngineeringEngineering (R0)