
Abstract
Microplastic pollution is a ubiquitous environmental threat, in particular to the oceans. In the marine environment, microplastics are not just passively transported by sea currents, but often get contaminated with organic pollutants during the journey. The uptake of chemicals onto microplastics can worsen the adverse effects of microplastics to marine organisms; however, investigation on this urgent phenomenon is hampered by the impossibility of monitoring and tracking such small plastic fragments during their motion at sea. This work aims at addressing the need for an effective modelling of the advection–diffusion processes jointly involving microplastics and the pollutants they carry to further our understanding of their spatiotemporal patterns and ecological impacts, focusing on the Mediterranean Sea. Here we present the conceptual design, methodological settings, and modelling results of a novel, data-informed 2D Lagrangian–Eulerian modelling framework that simultaneously describes (i) the Lagrangian dispersal of microplastic on the sea surface, (ii) the Eulerian advection–diffusion of selected organic contaminants, and (iii) the gradient-driven chemical exchanges between microplastic particles and chemical pollutants in the marine environment in a simple, yet comprehensive way. Crucial to the realism of our model is exploiting the wide variety and abundance of data linked with drivers of Mediterranean marine pollution by microplastics and chemicals, ranging from national censuses to satellite data of surface water runoff and GPS ship tracking, other than the use of oceanographic reanalyses to inform microplastics’ motion at sea. The results of our method applied to a multi-year simulation contribute to a first basin-wide assessment of the role of microplastics as a vehicle of other pollutants of concern in the marine environment. The framework proposed here is intended as a flexible tool to help advance knowledge towards a comprehensive description of the multifaceted threat of marine plastic pollution and an informed support to targeted mitigation policies.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
- Microplastic pollution
- Numerical modelling
- Lagrangian particle tracking
- Eulerian advection–diffusion
- Coupled Lagrangian–Eulerian
- Plastic-Related Organic Pollutants
1 Introduction
The pervasiveness of plastic waste in the environment, and particularly in the oceans, is eliciting global concern for its role of additional stressor in the functioning of ecosystems that are already heavily impacted by the local effects of the global climate crisis and of human activities. It has been estimated that, in the global oceans, most of the mass of polluting plastics can hardly be seen by eye, not only because it may be found on the seafloor, but also because it is present in form of smaller fragments, the so-called microplastics (<5 mm, [1]). Microplastics may be difficult to detect, but not less risky: because of their high surface-to-volume ratio, microplastics can effectively release pollutants (starting from the chemical compounds added during the production of their parent materials) and absorb other contaminants, such as hydrophobic organic chemicals, when transported through polluted marine environments by wind and ocean currents. The capacity of microplastics to exchange such Plastic-Related Organic Pollutants (PROPs, [9]) with the environment may exacerbate their toxicological impacts to marine organisms, potentially involving entire marine food webs, even up to humans.
Like in the case of other atmospheric and oceanographic pollution phenomena, further understanding of microplastics’ spatial patterns has often been supported by numerical modelling and simulations, crucially relying on the most up-to-date information to produce novel knowledge. In recent years, ocean data collection and dissemination has experienced an unprecedented growth as a consequence of the deployment of new technologies and infrastructures [3], other than political will, allowing to dramatically improve our understanding of the global oceans and their dynamics. Nonetheless, on-field data is insufficient to describe the interactions between marine microplastics and the seascape they travel though, as these involve widely different spatial scales, with chemical interactions occurring at the surface of each microplastic particle, which is in turn entrained by large-scale ocean dynamics. On the other hand, there is abundance of data related to the release of plastic waste and chemical pollution to the marine environment: for instance, presence of people and the related activities, both in-land and offshore, like fishing; in addition, also the characteristics of the land, such as hydrography, may modulate the inflows of plastic and contaminants to the oceans. We thus argue that scientific computing and numerical simulations informed by such drivers of pollution can be of uttermost importance to investigate large-scale dispersal patterns and/or other spatial processes that could be hard to measure and track from field evidence. Crucial to the realism of such modelling efforts is the design and use of relevant data inputs, able to describe the drivers of pollution at sea.
To improve our understanding of marine plastic pollution and related phenomena, this work aims at investigating the important and quantitatively misregarded topic of the chemical exchanges occurring between microplastics and the seawater they travel through by developing and performing an in silico experiment with a novel data-informed modelling methodology, here applied to the Mediterranean Sea. This semi-enclosed, highly urbanized basin is considered as one of the global ecoregions most affected by anthropogenic pressure [16] including accumulation of plastic waste [5] and chemical pollutants [2]. This work is thus intended at providing a data-informed tool to support mitigation and control actions targeted to our study region.
2 Methods
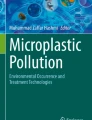
In our model, the dynamics of microplastics and PROPs at the sea surface is modelled through two widespread, yet often independently used, fluid dynamics modelling frameworks to solve the advection–diffusion-reaction equation (as from [6]), i.e. the Lagrangian for microplastic particle tracking, and the Eulerian for the advection–diffusion of PROPs. The liaison between the two approaches is obtained here by modelling the step-by-step chemical exchanges occurring between particles and the seawater surrounding them, and by account for the simultaneity of the phenomena represented by these processes by intertwining them through a suitable algorithm.
This theoretical framework, as represented in Fig. 1, has to be placed in the Mediterranean Sea context by informing it through relevant data. The dispersal of microplastics and of PROPs is driven by the underlying circulation patterns: this aspect is here addressed by using oceanographic reanalyses, providing state-of-the-art reconstruction of ocean dynamics. Furthermore, sources of microplastics and chemical pollution need to be modulated in their spatial distribution and temporal behaviors. Despite the recent attention catalyzed by this global issue and the variety of surveys aimed at quantifying the emissions of plastic waste or of chemicals into the marine environment, we can confirm, after some extensive research, that available on-field data is still insufficient to inform large-scale models: for this reason, we have to link them directly to their determinant factors, as will be discussed below.

Diagram of our coupled Lagrangian–Eulerian framework. The modelled entities, i.e. plastic particles and PROPs, are framed in black. Thick color-coded arrows represent Sub-Problems (grey: SP1, green: SP2, lilac: SP3). Black thin arrows represent the data used to force the model (gray box). From Fig. 1a in [10], used under CC BY Version 4.0/Colors modified from original
3 Coupling the Lagrangian and the Eulerian Frameworks
We identify three separate Sub-Processes (SPs) to be solved when considering the coupled dynamics of microplastic particles and their related pollutants in the marine environments: Lagrangian particle transport by sea surface currents, SP1; the Eulerian advection–diffusion dynamics of PROPs at sea surface, SP2; and the chemical gradient-driven mass transfer of PROPs between particles and the surrounding seawater, SP3, as schematically shown in Fig. 1 (see [8, 10], for further details about the setup of each SP).
To integrate the SPs over space and time and account for their simultaneity, we use an operator splitting approach, that is frequent in fluid dynamics and advection–diffusion problems, where a PDE or system of PDEs contains terms representing different physical processes that may occur over different time scales.
We base our coupling algorithm on the Strang operator splitting approach [19]. We thus implement our algorithm integrating each SP in staggered time steps as follows:
-
1.
Eulerian advection–diffusion of PROPs over the oceanographic domain (SP2) is solved over a half time-step [0; Δt/2];
-
2.
Lagrangian particle transport by surface currents (SP1) is simulated at a Mediterranean-wide scale over an entire time step [0; Δt];
-
3.
Coherently with the chemical gradient between the concentration of PROPs on each particle and in the surrounding seawater at time t = Δt, water-particle pollutant exchanges are solved at particle scale and concentration of PROPs in seawater is updated over [0;Δt] (SP3);
-
4.
SP2 is solved again for another half time step [Δt/2; Δt], so that the numerical scheme is completed over a full time step.
The three SPs and the algorithm are then implemented in Python programming language and executed throughout the duration of the coupled Lagrangian–Eulerian simulation. In particular, details about the calculation of water-particle pollutant exchanges and the updating of seawater and particle concentrations can be found in [10].
We simulate two years (2015–2016) of coupled Lagrangian–Eulerian interactions between daily-released particles transported by Mediterranean surface currents and target PROP (phenanthrene, a polycyclic aromatic hydrocarbon frequently found in Mediterranean seawater and bound to microplastics; [14]), with daily inputs throughout the Mediterranean Sea and undergoing advection–diffusion on its surface layer. During the simulation, we track the trajectories, particle-seawater PROP fluxes, and daily PROP concentrations of each of the 100 million microplastic particles released per year of simulation, for a total of over 250 million particles released.
4 Data Sources and Processing
4.1 Oceanographic Data
The advection of plastic particles and the advection–diffusion of PROPs are forced by the zonal and meridional components of surface ocean current velocities from the Mediterranean Sea Physics Reanalysis (MED REA) [18]; an example is visible in Fig. 2a. Reanalyses provide a coherent and consistent dynamical representation of ocean dynamics, as they consist of a retrospective modelling experiment where the state of several ocean variables of interest is simulated over a long period of time through an Ocean General Circulation Model (OGCM), and re-aligned to the best available observations from satellite sensors and/or in-situ measurements.

Visual description of the input data: ocean reanalysis and proxy variables used to characterize particle sources in SP1. a Surface currents as from MED REA; example from the North-Western Mediterranean Sea; from Fig. 1a in [7], used under CC BY Version 4.0; b Population along the Mediterranean coast, starting from the Strait of Gibraltar on a clockwise path, CIESIN dataset; c Average surface water runoff in the top-100-scoring river basins selected (purple color scale) and total fishing hours in 2015–2016 (orange color scale; see text for details). Because of its wide extent in latitude, the Nile basin is reported separately. b, c are from Fig. S1 in the supplementary information of [10], used under CC BY Version 4.0
4.2 Drivers of Plastic-Related Pollution in the Mediterranean Sea
Mismanaged waste from coastal cities, rivers collecting surface water runoff, and accidental release during fishing activities are commonly regarded as the main sources of marine plastic pollution in the Mediterranean [12]. In our simulations, we account for plastic and chemical pollution coming from each of these three sources, as shown in Fig. 2; we assume that the release of PROP follows the same indicators as the inputs of microplastics, described below. Importantly, particle release from onshore sources, i.e. along the coastline and at river mouths, depends on solid waste management within the country where the source point is located. To address this important aspect, both our coastal and riverine proxy indicators include the country-specific daily per capita generation rates of mismanaged plastic waste (MPW) [11].
4.3 Plastic Pollution Originating from Coastal Population
Coastal particle inputs (Fig. 2b) are set proportionally to the estimated quantity of MPW produced by the populations living close to the coasts of the Mediterranean Sea. Each coastal source thus emits a number of particles proportional to the product between two factors: the country-specific estimate of per capita MPW generation rate, as described above, and the population inhabiting in a 5 km-wide strip along the coast from the Gridded Population of the World—Population Count 2015 (CIESIN, 2018) which has a spatial resolution of 2.5 min (approximately 5 km × 5 km).
4.4 Plastic Pollution Originating in River Watersheds
As for riverine sources (Fig. 2c), we include as model forcings only the top-100 strongest riverine inputs of plastic pollution among all the Mediterranean coastal watersheds to reduce the computational effort during the simulations. The proxy indicator of particle release from rivers accounts for MPW generated within coastal watersheds (from the satellite-derived HydroBASINS—HydroSHEDS products for Europe and Africa, [13]) and for seasonal variations in surface water runoff, as the hydrological regime strongly affects the presence of debris in river waters. It is obtained by summing over each basin the gridded product of (a) monthly surface runoff (from the gridded 2015–2016 monthly FLDAS dataset, [15]), (b) inhabiting population (again from [4]), and (c) country-specific estimated per-capita MPW generation rates, using the same gridding as the CIESIN population data (the finest among the three datasets involved in the operation). We then average the indicator over 2015–2016 and select as particle sources for our model the rivers ranking in the top-100, and modulate their particle releases during the simulation according to the monthly values of their proxy indicator.
4.5 Plastic Pollution from Fishing Activities
The release of particles from fishing-related sources (Fig. 2b) can be intuitively assumed proportional to the fishing effort at each location within the Mediterranean Sea. We retrieve daily fishing effort (expressed in fishing hours/day) from the Global Fishing Watch dataset (https://globalfishingwatch.org/) provided as rasters with a spatial resolution of 1/100°. This dataset originates from the collection and processing of data from several sources, including vessel positioning from their Automatic Identification Systems (AIS, required by the International Maritime Organization on large ships), and satellite imagery.
5 Results
In Fig. 3, the average PROP pollution in the Mediterranean Sea resulting from running the coupled Lagrangian–Eulerian simulation is unpacked into its two components: PROP dissolved in seawater (Fig. 3a) and PROP bound to particles (Fig. 3b). Interestingly, even under our conservative assumption that particles are released without any PROP, particle bound PROP concentrations do not exactly match the average distribution of PROP in seawater, meaning that microplastics are far from mere passive samplers in constant equilibrium with their surroundings. In fact, both the chemical properties of microplastics and particle history (including source type and location, other than journey at sea) influence the particle-bound concentration of the target PROP, as this depends on the chemical gradients experienced by the particle during transport, and on the resulting mass transfer of PROP.

Polluted particles may in fact be transported far away from the source they were released from and finally be found polluted by PROPs at various and different levels, depending upon the PROP uptake/release kinetics between particles and seawater during the trip and on the timescales of particles’ motion at sea (see Fig. 3 in [10]).
During their journey at sea, particles travelling through highly-contaminated waters might thus convey the PROP they carry to less-polluted areas. Lagrangian tracking permits to apportion the microplastic-mediated chemical pollution resulting from the coupling with Eulerian advection–diffusion of PROPs at sea to specific source types and countries of origin of microplastic particles, as in Fig. 4.

Sourcing of desorbing particles and related PROP apportionment obtained from simulation for two exemplificative desorption areas, located in the southern Adriatic Sea (black frame in (a)) and in the northern Levantine Sea (black frame in (f)); b Apportionment of the particles desorbing in the southern Adriatic Sea by country of origin; c Source types of desorbing particles; d Average mass of PROP desorbed by each particle (in ngPROP /gparticles) by country of origin; e Same as in (d), by source type; g–j As in (b)–(e), for the desorption area in (f). (a) and (f) are from Fig. 5a, f in [10], used under CC BY Version 4.0
Importantly, our approach leverages, on the one hand, numerical schemes to model a complex, large-scale phenomenon, and Big Data to inform its forcings on the other. Thanks to real data, the modelled concentrations of PROPs and particles and the related PROP fluxes are not purely theoretical, but can be regarded instead as a first, verisimilar depiction of the chemical impacts of microplastic pollution in the Mediterranean seascape and of their sources.
6 Conclusions and Perspectives
The results of our novel Lagrangian–Eulerian simulations provide evidence that the presence of microplastics in Mediterranean seawater can affect the dispersal patterns of PROPs there, as microplastics can, during their transport by currents, effectively act as carriers of contaminants at sea, and are thus far from mere passive samplers in constant equilibrium with seawater PROP concentrations. This important knowledge provides insights about processes whose observation or measurement is complicated, or even impossible, to perform in an operational manner on field. Data from modelling experiments, albeit simplified like ours, can thus provide valuable information about recurrent pathways for microplastics at sea, their pollution level, and about areas with potentially higher pollution by particles and/or PROPs, and can do this on large spatial scales while ensuring high spatial resolution and continuous time series.
Comprehensive information about these phenomena can be crucial to deal with a set of pivotal tasks for marine conservation, such as the identification of marine regions exposed to higher ecological risks (as in [7]) and to provide valuable insights for planning basin-wide mitigation policies. Furthermore, the generality and adaptability of the Lagrangian–Eulerian modelling approach proposed here make it possible to be successfully deal not only with other geographic areas, potentially up to a global use, but also with similar problems arising when moving microplastic particles modify the properties of the surrounding marine environment.
It is important to highlight here that the major limitation faced by holistic modelling approaches like ours resides, at present, not just in the need to embrace more of the complexity of the issue of marine microplastic pollution and its related contaminants, but most importantly in the lack of suitable field data for detailing the inputs and for validating the model. In fact, even if we kept our Lagrangian and Eulerian parts of the model relatively simple and took assumptions based on available data, we still could not properly validate our model (although we could still perform some promising comparisons, see [9, 10]). Model validation needs a coherent, spatially and temporally-wide dataset including measurements of the concentrations of microplastics and PROPs in seawater and of microplastic-bound PROPs, that is currently unavailable (as also discussed in [10]. These knowledge gaps heavily influence quantitative modelling assessments of this kind, in term of both modelled seawater and particle-bound concentrations. Therefore, we argue that further model complexity will have to be supported by the availability of suitable data for validation.
Marine plastic pollution is a multifaceted and multiscale issue, as it presents physical, chemical, and biological implications for marine compartments at small scales while involving vast geographic domains. To counteract what can be regarded as a planetary boundary threat [17], we need tailored instruments to provide various layers of knowledge in an accessible manner. To this end, laboratory experiments and observations are indeed fundamental to capture specific aspects of plastic and plastic-related pollution; yet this zoo of data is still insufficient to provide a holistic description of this pervasive phenomenon. Quantitative methods, such as data informed numerical modelling, can link and exploit our current understanding of the different processes and complex interaction characterizing marine plastic pollution to ultimately help to shed some light on aspects that are hard to investigate in the field. Actions against marine pollution have to be timely, bold, and knowledge-based. In this perspective, comprehensive, data-informed approaches can help not only to identify and protect the mechanisms that interconnect marine ecosystems but also to understand the processes and synergies that are disrupting them.
References
Arthur, C., Baker, J., Bamford, H.: Proceedings of the International Research Workshop on the Occurrence, Effects, and Fate of Microplastic Marine Debris. NOAA Technical Memorandum NOS-OR&R-30 (2008)
Berrojalbiz, N., Dachs, J., Ojeda, M.J., Valle, M.C., Castro-Jiménez et al.: Biogeochemical and physical controls on concentrations of polycyclic aromatic hydrocarbons in water and plankton of the Mediterranean and Black Seas. Global Biogeochem. Cycles 25(4), 1–14 (2011).https://doi.org/10.1029/2010GB003775
Brett, A., Leape, J., Abbott, M., Panel, H.L., Ocean, S., Blue, E.: Ocean data need a sea change to help navigate the warming world. Nature 581, 181–183 (2020). http://odis.iode.org
Center for International Earth Science Information Network—CIESIN: Gridded Population of the World, Version 4 (GPWv4): Population Density, Revision 11. NASA Socioeconomic Data and Applications Center (SEDAC) (2018).https://doi.org/10.7927/H49C6VHW
Cózar, A., Sanz-Martín, M., Martí, E., González-Gordillo, J.I., Ubeda, B., Á.gálvez, J., Irigoien, X., Duarte, C.M.: Plastic accumulation in the Mediterranean Sea. PLoS ONE 10(4), 1–12 (2015).https://doi.org/10.1371/journal.pone.0121762
Fischer, H.B., List, E.J., Koh, R.C.Y., Imberger, J., Brooks, N.H.: Mixing in Inland and Coastal Waters. Academic Press, USA (1979)
Guerrini, F., Mari, L., Casagrandi, R.: Modeling plastics exposure for the marine biota: risk maps for fin whales in the Pelagos Sanctuary (North-Western Mediterranean). Front. Marine Sci. 6, 1–10 (2019). https://doi.org/10.3389/fmars.2019.00299
Guerrini, F., Mari, L., Casagrandi, R.: Microplastic as a vector of chemical contamination in the marine environment: a coupled Lagrangian-Eulerian approach. Global Oceans 2020: Singapore—U.S. Gulf Coast (2020). https://doi.org/10.1109/IEEECONF38699.2020.9389405
Guerrini, F., Mari, L., Casagrandi, R.: The dynamics of microplastics and associated contaminants: data-driven Lagrangian and Eulerian modelling approaches in the Mediterranean Sea. Sci. Total Environ. 777, 145944 (2021). https://doi.org/10.1016/j.scitotenv.2021.145944
Guerrini, F., Mari, L., Casagrandi, R.: A coupled Lagrangian-Eulerian model for microplastics as vectors of contaminants applied to the Mediterranean Sea. Environ. Res. Lett. 17(2) (2022). https://doi.org/10.1088/1748-9326/ac4fd9
Jambeck, J.R., Geyer, R., Wilcox, C., Siegler, T.R., Perryman, M., Andrady, A., et al.: Plastic waste inputs from land into the ocean. Science 347(6223), 764–768 (2015). https://doi.org/10.1126/science.1260879
Kaandorp, M.L.A., Dijkstra, H.A., van Sebille, E.: Closing the Mediterranean marine floating plastic mass budget: inverse modeling of sources and sinks. Environ. Sci. Technol. (2020).https://doi.org/10.1021/acs.est.0c01984
Lehner, B., Grill, G.: Global river hydrography and network routing: baseline data and new approaches to study the world’s large river systems. Hydrol. Processes 27(15), 2171–2186 (2013). www.hydrosheds.org
León, V.M., García, I., González, E., Samper, R., Fernández-González, V., et al.: Potential transfer of organic pollutants from littoral plastics debris to the marine environment. Environ. Pollut. 236, 442–453 (2018). https://doi.org/10.1016/j.envpol.2018.01.114
McNally, A.: NASA/GSFC/HSL (2018) FLDAS Noah Land Surface Model L4 Global Monthly Climatology 0.1 x 0.1 degree (MERRA-2 and CHIRPS)
Micheli, F., Halpern, B.S., Walbridge, S., Ciriaco, S., Ferretti, F., Fraschetti, S. et al.: cumulative human impacts on Mediterranean and black sea marine ecosystems: assessing current pressures and opportunities. PLoS ONE 8(12) (2013). https://doi.org/10.1371/journal.pone.0079889
Rockström, J., Gupta, J., Lenton, T.M., Qin, D., Lade, S.J., Abrams, J., et al.: Identifying a safe and just corridor for people and the planet. Earth’s Future 9(4), 1–7 (2021). https://doi.org/10.1029/2020EF001866
Simoncelli, S., Fratianni, C., Pinardi, N., Grandi, A., Drudi, M., Oddo, P. et al.: Mediterranean Sea Physical Reanalysis (MEDREA 1987–2015) (Version 1). In E.U. Copernicus Marine Service Information (2014). https://doi.org/10.25423/medsea_reanalysis_phys_006_004
Strang, G.: On the construction and comparison of difference schemes. SIAM J. Numer. Anal. 5(3), 506–517 (1968)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this chapter

Cite this chapter
Guerrini, F. (2023). Data-Informed Models for the Coupled Dispersal of Microplastics and Related Pollutants Applied to the Mediterranean Sea. In: Riva, C.G. (eds) Special Topics in Information Technology. SpringerBriefs in Applied Sciences and Technology(). Springer, Cham. https://doi.org/10.1007/978-3-031-15374-7_1
Download citation
DOI: https://doi.org/10.1007/978-3-031-15374-7_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-15373-0
Online ISBN: 978-3-031-15374-7
eBook Packages: EngineeringEngineering (R0)