
Abstract
With the aim of creating wearable haptic interfaces that allow the performance of everyday tasks, we explore how differently designed fingertip wearables change the sensory threshold for tactile roughness perception. Study participants performed the same two-alternative forced-choice roughness task with a bare finger and wearing three flexible fingertip covers: two with a square opening (64 and 36 mm\(^2\), respectively) and the third with no opening. The results showed that adding the large opening improved the 75% JND by a factor of 2 times compared to the fully covered finger: the higher the skin-surface contact area, the better the roughness perception. Overall, the results show that even partial skin-surface contact through a fingertip wearable improves roughness perception, which opens design opportunities for haptic wearables that preserve natural touch.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
An increasing number of wearable devices, sensing gloves, and video game controllers now provide haptic feedback due to strong interest in tactile communication for extended reality (XR), which includes augmented reality (AR), and virtual reality (VR) [10]. These devices provide many advantages compared to desktop haptic interfaces, such as freedom of motion, transportability, and efficient XR integration. However, wearing haptic devices on the finger also has drawbacks. One major challenge is that devices that provide force or vibrotactile feedback often cover the fingertip with a plastic platform or belt, e.g., [6, 10, 11]. Thus, whenever a user wears the device, they cannot directly feel objects and surfaces that are part of the real environment surrounding them.
This constraint is limiting because it prevents the use of mice, keyboards, and touchscreens, and because it interferes during contact with real materials that are increasingly used to complement and enrich virtual objects [2, 12]. For example, a novel research trend moves a small number of physical objects to render interaction with many virtual items [5]. Therefore, it seems that future XR applications will need to mix purely virtual haptic rendering generated by a device with the efficient use of tangible objects and surfaces.
The use of a probe, glove, or finger sheath is known to impair roughness discrimination [4]. Previous studies have also shown that wearing medical gloves impairs dexterity and tactile sensitivity during medical tasks such as determining pulse location [7]. Perception of vibration magnitude is mostly preserved during the use of a probing tool, though acuity depends on how the tool is held in the hand [16]. The size of the probe also impacts the tactile perception of vibration, which points to a role of the skin area in contact [14]; this process is probably mediated by the specific receptive fields of the tactile afferents [1].
Recent research has already begun creating devices that generate haptic feedback while preserving the user’s tactile and kinesthetic capabilities. For example, a vibrotactile actuator can be placed on a proximal segment of the finger rather than the fingertip; to some extent, the brain relocates the stimulus to the tip of the finger, where the interaction is believed to take place [9]. In another recent design, the fingertip device folds itself up when the user interacts with real objects [13]. A third approach is to build very thin actuators that partially preserve haptic perception. Thin soft layers with tiny embedded actuators preserve most of the tactile acuity [8] but can provide only specific electrical or vibrotactile cues that aim more at tactile communication rather than rich rendering [15].
The current study explores how preserving direct skin-surface contact in a fingertip band (as used in several wearables [6, 11]) through openings of different sizes impacts roughness perception. To that end, we have designed three flexible fingertip wearables that are either solid or have a central square opening. Since roughness perception relies on either skin deformations or vibration, the size of the skin contact is likely to affect the amount of preserved tactile accuracy. For small openings, the occurring deformation patterns might be limited, and skin vibrations might be distorted. Results from the experiment suggest that larger preserved skin-surface contact improves roughness perception.

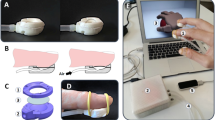
a) The three wearable interfaces that were used in the study included square fingerpad openings that are 64 mm\(^2\), 36 mm\(^2\), and 0 mm\(^2\). b) Each one is held on the finger by two elastic bands, which are retained by four 3D printed studs mounted at the corners of the surface covering the fingerpad. c) Underside of the interface with the 64 mm\(^2\) opening while it is worn by a participant.
2 Materials and Methods
Data were collected from eight right-handed volunteers and one left-handed volunteer. They were healthy and aged between 21 and 59. This study was approved by the ethics committee on human research of Université catholique de Louvain. All participants gave written informed consent.
Experimental Setup. Three wearable interfaces were custom-built for the experiment (Fig. 1). They are made of Dycem sheet that is 0.7 mm thick, and they are fixed to the finger with two elastic bands. Dycem was chosen to be flexible but not extensible, and to have a high coefficient of friction; such characteristics are compatible with the creation of a wearable device that would provide haptic cues such as shear force, normal force, or vibration. Three types of fingertip wearables were laser-cut with respective openings of 64 mm\(^2\), 36 mm\(^2\), and 0 mm\(^2\) (no opening); the corresponding horizontal and vertical aperture dimensions are 8 mm and 6 mm. The apertures featured 0.5 mm fillets on the corners to prevent tearing of the material during use, given that these are the points of highest stress concentration. The wearables were fixed to the finger rather tightly but with special care not to have a bump of skin protruding through the opening due to excessive pressure. The interfaces also included a rectangular section that wrapped around the distal part of the fingertip and was secured over the nail to prevent surface contact by other regions of the participant’s skin.
Square 40 mm \(\times \) 40 mm surfaces covered by grids of rigid raised dots were used in the psychophysical experiments (Fig. 2a). These surfaces were 3D-printed (Objet Connex 260) from a design that has already been used in the literature to estimate the human sensory threshold for roughness [8]. The reference surface had a center-to-center dot spacing of 1.00 mm, and the comparison surfaces had dots spacings of 1.05 mm, 1.08 mm, 1.20 mm, 1.30 mm, 1.50 mm, 1.70 mm, 1.80 mm, and 2.00 mm. These intervals are identical to the 3D-printed grids that were used by Nittala et al. [8]. All surfaces had a dot height of 0.65 mm.
The experimental setup consisted in a sample holder mounted on a Nano17 force/torque sensor (ATI, USA). The holder had two square recesses in which the square surfaces could be inserted and interchanged between trials. A curtain placed between the sample holder and the participant prevented the use of visual cues. A MATLAB script and an NI USB-6343 X series acquisition card were used to run the psychophysical experiment and record the force data (Fig. 2b).

a) The reference and comparison samples were placed on an instrumented sample holder for the forced-choice task. b) A sample normal force profile captured by the force sensor during one trial of the experiment.
Psychophysical Procedure. Participants had to perform a roughness discrimination task in four conditions: with their bare finger and while wearing the prepared Dycem interfaces with openings of 64 mm\(^2\), 36 mm\(^2\), and 0 mm\(^2\). The order of the conditions was counterbalanced across participants. However, it has to be noted that the 64 mm\(^2\) opening was added after the sixth participant because performance with the 36 mm\(^2\) opening was poorer than expected. The 64 mm\(^2\) condition was performed last by the first six participants; hence, the presentation order was not fully counterbalanced.
For each condition, participants performed the same forced-choice roughness task, which consisted in freely exploring the two samples and reporting whether the left or right one felt rougher. We used a Zwislocki staircase procedure that targets the 75% just noticeable difference (JND), which is common for threshold estimation [17]. We started with a comparison square grid whose dots have a center-to-center dot spacing of 1.70 mm, which is a difference of 70% compared to the 1.00 mm spacing of the reference grid. During the procedure, the difference with the reference grid was decreased by switching to a grid with smaller spacing after three non-consecutive correct answers and increased in the same manner after each error. The staircase was ended after either five reversals or 30 trials. To reduce left/right confusion, the samples were identified with the words “one” and “two”, and each answer was double-checked by the experimenter before being recorded in the MATLAB script. The surfaces and interfaces were washed with soap, and volunteers thoroughly cleaned their hands with alcohol disinfectant.
Data Analysis. The 75% JND was computed by averaging the center-to-center spacing of dots across the last ten trials before the end of the psychophysical staircase for each participant in each condition. Several times during the experiment, especially with the bare finger, participants reached the minimum difference that was possible with the square grids. In those cases, a sensory threshold of 5% was recorded, corresponding to the smallest tested grid. In addition, the collected force measurements were used to compute the average normal force during contact as well as the duration of the participant’s tactile interaction with the samples. The statistical analyses were performed with the Graphpad prism software; the D’Agostino & Pearson normality test was used to decide whether a parametric or non-parametric statistical analysis should be performed.

a) Last 15 trials of the participants’ staircases averaged for each condition (mean ± SEM). b) 75% just noticeable difference (JND). Each bar graph represents the mean value for an experimental condition, and the error bars show the standard deviation across participants. The individual sensory thresholds appear as solid dots when the staircase ended due to the number of errors and as open circles when the participant successfully discriminated the two most similar roughness samples.
3 Results
The aim of the study was to test whether varying the conditions of skin-surface contact significantly affects tactile sensory performance. For each experimental condition, we computed and plotted the mean staircases across participants for the last 15 trials before the end of the procedure (Fig. 3a). This interval was chosen because 15 trials was the lowest possible number of trials. The results suggest that convergence occurred for the conditions in which the skin directly touched the surface. The curve is noisier when the fingertip was fully covered, perhaps due to artefacts such as random slips or a higher cognitive load during this indirect exploration. Thus, we performed a Friedman non-parametric statistical test between the four conditions (Fig. 3b), which showed a significant impact of the condition on the 75% JND (n = 9, Q(4) = 19.64, p = 0.0002). The post-hoc analysis that was performed with a Dunn’s multiple comparisons test showed significant differences between the bare finger and the 0 mm\(^2\) conditions (p = 0.0003) and between the bare finger and the 36 mm\(^2\) conditions (p = 0.0017), as well as a marginally significant difference between the 64 mm\(^2\) and the 0 mm\(^2\) conditions (p = 0.052). Overall, the data indicate that the amount of skin-surface contact matters for roughness discrimination.
We also used the force recordings to quantify how participants interacted with the samples during each trial. A threshold of 0.05 N, which is around five times higher than the noise level of the sensor, was used to determine when tactile exploration was occurring. By this method, we could obtain the average duration of tactile interaction across the final ten trials that were used to compute the 75% JND (Fig. 4a). A Friedman statistical analysis showed no influence on the experimental condition on the duration of tactile exploration.
We used the same threshold to compute the average normal force exerted during the final ten trials that contributed to the JND (Fig. 4b). As for the duration, the Friedman statistical test showed no significant impact of the experimental conditions. Surprisingly, some individual data points showed average normal force values as high as 5 N; we found that all of the average normal force values over 2 N came from two participants. Thus, these values resulted from the general strategy of these participants rather than because of a specific condition.
Finally, we tested the possibility that pushing harder could impact the protrusion of skin through the opening in the wearable interface and hence the participant’s sensitivity to roughness. However, as seen in Fig. 4c, a Spearman analysis between the exerted normal force and the sensory threshold for the conditions with an opening in the interface did not show any significant correlation.

a) Duration of surface contact during a trial; the data points show the average touch interaction time for each participant in each condition, while the bar graphs depict the mean and standard deviation for each condition. b) The same type of graph for the mean normal force exerted by participants. The dashed lines connect the surprisingly large values from two participants. c) Relationship between the mean normal force and the 75% JND for the conditions with 64 mm\(^2\) and 36 mm\(^2\) openings in the interface; no significant correlation is observed.
4 Discussion
The results have shown that adding an opening in a flexible skin cover can improve the wearer’s tactile acuity compared to a solid cover of the finger. Three of the nine participants achieved the smallest threshold when the cover had a large opening (64 mm\(^2\)), while none of them could distinguish this small differences in surface roughness when the wearable had no opening (0 mm\(^2\)). Interestingly, we did not find an effect of the condition on the duration of tactile exploration or the applied normal force. It seems that participants chose a duration and normal force strategy at the start and did not deviate much from it during the experiment, unlike in [3], where participants pushed much harder when the button detection task was more challenging. However, we did not find an influence of the duration of tactile exploration or the normal force on the participant’s 75% JND. Thus, it seems that performance at the task was predominantly driven by the tactile sensitivity of participants and that exploration behaviour played little role. We were especially interested in whether an increased amount of skin put into contact with the surface by pushing harder could improve roughness perception for conditions that included an opening, but we found no evidence of a correlation between average normal force and the sensory threshold.
The main result of the experiment is that a rather small contact area between the skin and external surfaces (through a 64 mm\(^2\) opening) is sufficient to improve the JND from 23.8% to 12.0%, which is a two-times-better sensory threshold. Overall, our results are in line with existing literature on perception with a solid finger covering [4, 8] and the importance of skin-surface contact area [14], and they provide a new insight about the potential of partial skin-surface contact. Therefore, we imagine the opportunity to design wearable haptic interfaces that achieve contact force rendering through bands or a cover containing openings while largely preserving natural tactile sensation.
Although we carefully controlled their fit, the wearable interfaces used in our study were the same for all participants. Using constant opening sizes probably impacted our results since finger sizes are variable; the ratio between the preserved contact area and the contact area of the bare finger thus varied across people. Some participants commented that skin-surface contact was intermittent with the small opening since the cover was rather thick. Contact in this condition might also have been impacted by the elasticity of each participant’s skin. Future research will determine whether openings in a fingertip cover also improve other dimensions of tactile acuity such as texture and softness perception. We are also curious whether it is possible to superpose accurate rendering of virtual haptic features with preserved natural sensation of the touched surface or object.
References
Abraira, V., Ginty, D.: The sensory neurons of touch. Neuron 79(4), 618–639 (2013). https://doi.org/10.1016/j.neuron.2013.07.051
Bouzbib, E., Bailly, G., Haliyo, S., Frey, P.: CoVR: a large-scale force-feedback robotic interface for non-deterministic scenarios in VR. In: Proceedings of the ACM Symposium on User Interface Software and Technology (UIST), pp. 209–222 (2020). https://doi.org/10.1145/3379337.3415891
Gueorguiev, D., Kaci, A., Amberg, M., Giraud, F., Lemaire-Semail, B.: Travelling ultrasonic wave enhances keyclick sensation. In: Prattichizzo, D., Shinoda, H., Tan, H.Z., Ruffaldi, E., Frisoli, A. (eds.) EuroHaptics 2018. LNCS, vol. 10894, pp. 302–312. Springer, Cham (2018). https://doi.org/10.1007/978-3-319-93399-3_27
Klatzky, R.L., Lederman, S.J.: Tactile roughness perception with a rigid link interposed between skin and surface. Percept. Psychophys. 61(4), 591–607 (1999)
Mercado, V., Marchai, M., Lécuyer, A.: Design and evaluation of interaction techniques dedicated to integrate encountered-type haptic displays in virtual environments. In: 2020 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), pp. 230–238 (2020). https://doi.org/10.1109/VR46266.2020.00042
Minamizawa, K., Fukamachi, S., Kajimoto, H., Kawakami, N., Tachi, S.: Gravity grabber: wearable haptic display to present virtual mass sensation. In: Proceedings of ACM SIGGRAPH Emerging Technologies, SIGGRAPH 2007, p. 8-es (2007). https://doi.org/10.1145/1278280.1278289
Mylon, P., Lewis, R., Carré, M.J., Martin, N.: Evaluation of the effect of medical gloves on dexterity and tactile sensibility using simulated clinical practice tests. Int. J. Ind. Ergon. 53, 115–123 (2016). https://doi.org/10.1016/j.ergon.2015.11.007
Nittala, A.S., Kruttwig, K., Lee, J., Bennewitz, R., Arzt, E., Steimle, J.: Like a second skin: understanding how epidermal devices affect human tactile perception. In: Proceedings of the CHI Conference on Human Factors in Computing Systems, pp. 1–16. ACM (2019). https://doi.org/10.1145/3290605.3300610
Pacchierotti, C., Salvietti, G., Hussain, I., Meli, L., Prattichizzo, D.: The hRing: a wearable haptic device to avoid occlusions in hand tracking. In: Proceedings of the IEEE Haptics Symposium (HAPTICS), pp. 134–139 (2016). https://doi.org/10.1109/HAPTICS.2016.7463167
Pacchierotti, C., Sinclair, S., Solazzi, M., Frisoli, A., Hayward, V., Prattichizzo, D.: Wearable haptic systems for the fingertip and the hand: taxonomy, review, and perspectives. IEEE Trans. Haptics 10(4), 580–600 (2017). https://doi.org/10.1109/TOH.2017.2689006
Prattichizzo, D., Chinello, F., Pacchierotti, C., Minamizawa, K.: Remotouch: a system for remote touch experience. In: Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pp. 676–679 (2010). https://doi.org/10.1109/ROMAN.2010.5598606
Roo, J.S., Hachet, M.: One reality: augmenting how the physical world is experienced by combining multiple mixed reality modalities. In: Proceedings of the ACM Symposium on User Interface Software and Technology (UIST), pp. 787–795 (2017). https://doi.org/10.1145/3126594.3126638
Teng, S.Y., Li, P., Nith, R., Fonseca, J., Lopes, P.: Touch&Fold: a foldable haptic actuator for rendering touch in mixed reality. In: Proceedings of the ACM CHI Conference on Human Factors in Computing Systems, New York, NY, USA (2021). https://doi.org/10.1145/3411764.3445099
Verrillo, R.T.: Investigation of some parameters of the cutaneous threshold for vibration. J. Acoust. Soc. Am. 34(11), 1768–1773 (1962). https://doi.org/10.1121/1.1909124
Withana, A., Groeger, D., Steimle, J.: Tacttoo: a thin and feel-through tattoo for on-skin tactile output. In: Proceedings of the ACM Symposium on User Interface Software and Technology (UIST), pp. 365–378 (2018). https://doi.org/10.1145/3242587.3242645
Zamani, N., Culbertson, H.: Effects of dental glove thickness on tactile perception through a tool. In: Proceedings of the IEEE World Haptics Conference (WHC), pp. 187–192 (2019). https://doi.org/10.1109/WHC.2019.8816166
Zwislocki, J.J., Relkin, E.M.: On a psychophysical transformed-rule up and down method converging on a 75% level of correct responses. Proc. Natl. Acad. Sci. 98(8), 4811–4814 (2001). https://doi.org/10.1073/pnas.081082598
Acknowledgement
This work was funded by the Max Planck Society, CNRS, and the ANR grant Maptics. The authors thank the MPI-IS Robotics ZWE for helping to create the interfaces.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 The Author(s)
About this paper

Cite this paper
Gueorguiev, D., Javot, B., Spiers, A., Kuchenbecker, K.J. (2022). Larger Skin-Surface Contact Through a Fingertip Wearable Improves Roughness Perception. In: Seifi, H., et al. Haptics: Science, Technology, Applications. EuroHaptics 2022. Lecture Notes in Computer Science, vol 13235. Springer, Cham. https://doi.org/10.1007/978-3-031-06249-0_20
Download citation
DOI: https://doi.org/10.1007/978-3-031-06249-0_20
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-06248-3
Online ISBN: 978-3-031-06249-0
eBook Packages: Computer ScienceComputer Science (R0)