
Abstract
Unstable rock slopes are likely to cause rockfalls, threatening human lives and properties, industrial activities, and transportation infrastructures in mountain areas. There is an increasing demand to forecast and mitigate the potential damage of rockfalls by developing a reliable early warning system. In this thesis, an unstable mountain slope in northern Italy was selected as the research target. A microseismic monitoring network has been operating since 2013 as a field research laboratory to study the microseismic monitoring technique in the perspective of developing rockfall early warning systems. Locating microseismic events is a basic step of this technique to obtain the location of developing cracks as possible precursors of rockfalls. However, it is still a challenging task due to the heterogeneity of fractured rock slopes. The main purpose of this thesis is to address the issues related to event localization for microseismic monitoring strategy applied to the unstable rock face.
Graphical Abstract

You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Extension of human activities in mountain areas has given rise to worries about unstable rock slopes. Unstable rock slopes are likely to result in rockslides, causing serious threats to human safety and properties, industrial activities, and transportation infrastructures. Therefore, it is an increasingly significant issue to prevent and forecast dangerous incidents caused by unstable rock slopes. Management of rockslide hazards requires adequate information to better understand the mechanisms of rock slope failure. Monitoring an unstable rock slope as an early warning system to identify the danger of mass movement is the first step to assess the risk of rockslides. In this perspective, building an early warning system for rockslide hazards is consistent with the 11th sustainable development goals (SDGs) set by the United Nations, which is ‘Goal 11: Make cities inclusive, safe, resilient and sustainable’. More specifically, research in this field exclusively serves for one specific objective (11.5) under Goal 11: ‘By 2030, significantly reduce the number of deaths and the number of people affected and substantially decrease the direct economic losses relative to global gross domestic product caused by disasters, including water-related disasters, with a focus on protecting the poor and people in vulnerable situations.’ In details, the early warning system plays an important role to mitigate or avoid the deaths and economic losses caused by rockslide-related disasters in mountain areas throughout the world.
Rockslides, or more specifically ‘rock’ landslides, are a group of landslides composed of rocks rather than soils. According to the commonly used classification of landslide types [1], rockslides can be divided into different subclasses based on the type of movements (fall, topple, slide, spread, flow and slope deformation). Different rockslides present different movement velocities at various scales and the mechanical behavior of the rockslides is best related to the rock material. Due to the complex geological and geomorphological conditions on unstable rock slopes, rock mass failure contains more than one class of rockslides. For fractured brittle rock mass, the stability of the rock slope is primarily controlled by the existence of discontinuities. Since the discontinuity pattern of rock mass distributes both on the surface and in the subsurface, the designed monitoring system should investigate on the rock face and within the rock mass.
To acquire detailed information about the distribution of brittle discontinuities within rock mass, many geological, geomorphological and geophysical methods can be adapted. Remote-sensing and aerial techniques are usually employed to map the surface area of the unstable rock slope to indicate the topography. However, mapping investigation techniques limit the observation on the rock surface. Geotechnical techniques mainly including boreholes and trenching can provide detailed geological information, indicating the vertical boundary of the slide and the properties necessary for the slope stability analysis. However, these techniques can only monitor a few critical points or lines and the difficulty of drilling the unstable and steep slopes usually limits their application [2]. On the other hand, geophysical methods (e.g., seismic, electrical, electromagnetic and gravimetric methods) can detect the petro-physical parameters under the rock surface. Changes of the geophysical parameters characterizing the rock mass are likely to be generated by the rock mass modifications due to its instability.
Geophysical methods that are commonly used to investigate landslides are summarized in several review papers [3,4,5,6]. For rockslides studies, passive seismic techniques are the most frequently used method. The reason may be that these techniques can be carried out to characterize and monitor the stability of the rock slope. The application fields of passive seismic techniques mainly include two areas. The first application field is seismic noise measurements which can analyze the seismic response of rock slopes by processing seismic noise that is not related to incipient fracturing (e.g. earthquakes, ambient seismic vibrations). The second application field is to detect and locate microseismic events generated by fracture propagation inside unstable rock masses.
The capability of passive seismic methods in detecting and locating microseismic events makes it an efficient option to be integrated into early warning alarm systems. By locating microseismic events generated within an unstable rock mass, we can locate the growing cracks and understand the slide kinematics and triggering mechanisms of future collapses [7]. Therefore, microseismic events can be the precursors before the occurrence of a macroscopic failure of rockfall or rockslide.
Concerning the applications of passive methods in rockslides, several studies were devoted to analyzing microseismic signals as possible precursors of rockfalls [8,9,10,11]. These studies show the usefulness of a microseismic monitoring network in the early warning alarm systems for rockfall risk on unstable rock slopes. For early warning purposes, more applications of this method are used in different sites [12,13,14,15,16,17]. These studies showed that the larger amounts of recorded seismic signals require a classification procedure to distinguish microseismic events from the noise. More importantly, these classified microseismic events also need to be located, because the localization of microseismic events is necessary to understand which part of the rock mass is cracking in order to be able to recognize the rockfall risk. Location results will also help to select the microseismic events close to the target monitored area and exclude small rockfalls and the events that are far from the monitored area, generated by other sources.
Although hypocenter localization of seismic events (usually followed by data acquisition and event classification) has been a basic step in microseismic monitoring, it is still a challenging task. One main reason that causes difficulties for a reliable event location is that the seismic velocity distribution is highly heterogeneous within unstable slopes so that the waveforms experience strong scattering and high attenuation. Therefore, contrary to what is usually adopted in large scale studies for earthquake localization, it is impossible to use a homogeneous or layered model to characterize the fractured zone in the limited rock volumes monitored by small-scale microseismic networks. Moreover, short distances between sources and receivers make it difficult to distinguish P and S waves, and thus direct estimations of source distance are impeded.
In this thesis, the localization problem was addressed for a microseismic monitoring network installed on the unstable rock cliff of Mount San Martino for early warning purposes. Based on the event location, the classification of microseismic events was revisited to extract fracture events. Finally, a procedure for the design of an expanded network was proposed to improve location accuracy.
2 Methods and Results
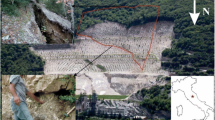
The research target is the limestone rock face of Mount San Martino that is threatening the town of Lecco (northern Italy) due to its historical rockfall events (Fig. 1). A microseismic monitoring system was installed on the mountain for early warning purposes in 2013 and has continuously recorded the data since then.

The study site in the southern part of Mount San Martino. a Front view of Mount San Martino from Lecco. The yellow rectangle indicates the monitored area where the monitoring network was deployed. b Rock face with the positions of the five three-component geophones and the acquisition board of the microseismic monitoring system. The red arrow indicates the partially detached pillar below geophone 4. c Photogrammetric model of the monitored area with the orientations of the five geophones
To construct the three-dimensional (3D) velocity model required for reliable hypocenter localization, a seismic tomographic survey was performed on the mountain surface above the rock face. Source test measurements were conducted to select a suitable source capable of triggering all geophones. Hammer emerged among the other tested options as the preferred source because it performed like the seismic gun in terms of signal energy and spectral content while demonstrating superiority in terms of portability and flexibility in the harsh environment of the study site. We used GeoTomCG software [18] which performs three-dimensional tomographic inversion. The results of seismic traveltime inversion showed high heterogeneity of the rock mass with significant contrasts in velocity distribution (Fig. 2). Low velocities were found at the shallow depth on top of the rock cliff and intermediate velocities were observed in the most critical area of the rock face corresponding to a partially detached pillar. Two sensitivity tests were implemented to evaluate the resolution and stability of the inversion [19].

Velocity model obtained from 3D tomographic inversion using a 2 × 2 × 4 m grid. Colored blocks indicate the velocity field in the rock mass where at least one ray travels. The red arrow indicates the partially detached pillar on top of which geophone 4 is installed
After obtaining the 3D velocity model from the inversion, the global grid search location method [20] was selected for event localization and the misfit function was defined based on the Equal Differential Time (EDT) method [21]. Seismic shots with known positions were located to estimate the location accuracy on the upper part of the rock mass. The hypocenter misfits were around 15 m with the 5 geophones of the microseismic network and the error was significantly decreased compared to the results produced by a constant velocity model. Besides, the analysis of location accuracy was extended to the whole volume of the rock mass by using synthetic traveltimes affected by random errors consistent with the noise level observed on real data (Fig. 3). Although three geophones of the seismic network are installed near the critical area where the partially detached rock pillar was located, accuracy in this area is not better than the accuracy on the upper part of the rock face probably due to the high heterogeneity of rock mass and the higher velocities in this area [22].

Average location error on vertical slices cutting the 3D model at X = 18, 26, 34 m (a, b, c) and at Y = 10 m. d Red squares indicate the positions of the five geophones projected on each slice
The classification procedure for microseismic events was updated by the hypocenter location of a subset of microseismic events with high data quality, which is one of the novelties of this research work [23]. The microseismic events were preliminarily classified into two subclasses: suspected rockfall events with multiple signals in the recordings and suspected fracture events with a single signal in the recordings. The location results for the suspected rockfall events almost met our expectations (Table 1). Most of the signals in rockfall events were located on or near the rock face thus confirming the initial classification. The last column in Table 1 refers to the rockfall type, which is an additional information that we can derive from the analysis of the number of recorded signals combined with their time of occurrence and their location. Based on that, rockfall events can be sub-classified into four rockfall types:
-
Rockfall events that are generated by only one falling stone bouncing on the rock face (Single);
-
Rockfall events that involve more than one stone (Multiple);
-
Rockfall events in which the number of involved stones is uncertain considering the location accuracy (Uncertain);
-
Rockfall events that occurr on the rock surface at the summit of the rock face (Summit debris noise).
For the suspected fracture events, Table 2 summarizes the location results for 20 selected fracture events. Based on the hypocenter locations, these fracture events could be reclassified into five groups: events that are located inside the rock mass (Fracture); events that are located on the rock surface at the summit of the rock face and are probably related to the movement of the debris covering the summit (Rockfall); events that are located on the vertical boundaries of the model (Far event); events that are located near the rock face so that they are likely generated by a fracture although we cannot exclude a probable single stone rockfall hitting the rock face only once and then disappearing without generating any other signal from a lower point below the monitored area (Suspected fracture); and events that are located at the lower boundary of the model near the rock face so that we suspect that they are fracture events occurring within the lower section of the unstable area of the rock mass, i.e., the lower part of the unstable rock pillar, although we cannot exclude the case of a single stone hitting the rock face only once at a point located below the monitored area (Suspected fracture (outside the area)). Based on the results, only a few (4 out of 20) events were located inside the rock mass at such a distance from the rock face that they cannot be confused with rockfalls. Further improvements in location accuracy are necessary to distinguish suspected fracture events that were located close to the rock face from rockfalls. On the other hand, the hypocenter location helped to identify events generated outside the monitored area and rockfalls that were located on the rock surface at the summit of the rock face. This feasibility study shows that the hypocenter location is a promising method to improve the final classification of microseismic events.
Another original contribution of the thesis is to suggest a procedure for designing an expanded network in order to improve the localization accuracy in the most critical part of the rock mass [24]. Additional geophones were progressively added to the existing network, selecting their positions with special care to improve the azimuth coverage and source-receiver distance coverage. Three progressively expanded networks with 9, 13 and 15 geophones were studied to explore the improvement in location accuracy and it was observed that the location error was reduced from 12–24 m (5 geophones) to 4–6 m (15 geophones) (Fig. 4). The relatively low location errors in the critical part with 15 geophones would help to improve the classification of microseismic events. The method can be used in near future for expanding the network transforming the current network with 15 channels using 5 three-component (3C) geophones into a network of 15 single-component (1C) geophones.

Average location error on the vertical slices at X = 18 m, a 26 m, b 34 m, c and the vertical slice at Y = 10 m d with a network of 15 geophones. Red squares and other colored squares indicate respectively the positions of the original five geophones and additional geophones projected on each slice (Colorbar: 0–40 m as in Fig. 3)
Summarizing, the main novelties of this research work are:
-
the design and the practical solutions adopted to perform the tomographic experiment in a harsh environment to derive a reliable 3D velocity model;
-
the analysis of the localization accuracy extended to the whole monitored rock mass;
-
the reclassification of microseismic events based on hypocenter location;
-
the methodology proposed to design an expanded network to improve the localization and classification of microseismic events.
3 Conclusions
Microseismic monitoring, as one application of passive seismic techniques, has been increasingly used in the studies of unstable rock slopes to develop an early warning alarm system. This system would work for decreasing the damages caused by rockslide-related disasters, serving for the Goal 11 of SDGs. In order to recognize the areas with potential rockfall or rockslide risk triggered by unstable rock slopes, localization of seismic events is required to trace the propagation of fractures within the rock mass.
The first two goals of this thesis were to construct a 3D velocity model that is required for reliable hypocenter localization and to estimate the location accuracy based on the obtained 3D velocity model. To construct the 3D velocity model for the study area, a tomographic survey was carried out after performing source tests to select a suitable source. Then seismic traveltime inversion was implemented by using first-arrival picks to obtain the velocity distribution within the rock mass. Two sensitivity tests were performed to evaluate the resolution and stability of the inversion. To estimate the location accuracy, the global grid search method was first selected for event localization and the misfit function was defined based on the EDT method. Then, the location accuracy was estimated in two steps: 1-using the data of seismic shots with known positions (performed in the tomographic survey) to estimate the location accuracy in the upper part of the rock face; 2-assessing the expected location accuracy for the whole rock mass, particularly in the critical area, by using synthetic data affected by random errors.
However, the limitations of the present work must be noted for future improvements. Due to the harsh investigated area, the layout of the source positions for the tomographic survey was constrained on the rock surface at the summit of the rock face. This causes the inverted velocity model to only cover a limited volume of the rock mass, especially in the lower part of the monitoring area. Therefore, the localization results should be further improved, for example, by better extrapolating the velocity field to the neighboring areas of the current 3D model and by testing new misfit functions, also including a travel-time quality factor. Moreover, in order to enlarge the raypath coverage within the rock mass, some source positions can be designed on the rock face (if possible) for future tomographic investigation.
Although the location accuracy is not small enough to distinguish rockfalls from rock cracks occurring near the exposed face of the rock mass, the location algorithm can be used to improve the classification procedure by distinguishing the events occurring in the monitored area from rockfalls or other events occurring far from the monitored area. Moreover, the location accuracy can be improved by introducing more geophones to the current 5-geophone network. From these points of view, the location results implicate that the location algorithm based on the 3D velocity model can be applied to realize two other objectives of this thesis, which represent two original contributions of this research work: to explore the usefulness of hypocenter location in the classification of microseismic events and to design an expanded network to improve the location accuracy.
The results obtained in this thesis show the necessity of expanding the geophone network to improve the location accuracy and then improve the classification of the microseismic events. If event localization is accurate enough, its results can be used to distinguish rockfall events from fracture events because rockfalls only occur on the rock surface. Another future work would be exploring some efficient denoising methods to process the microseismic events with relatively lower SNRs to get reasonable arrival times for event localization. After this procedure, more fracture events can be extracted by the classification based on hypocenter location. This group of fracture events will be used to analyze the evolution of microseismic activities with time and space to indicate the most unstable area on the rock face. Moreover, the evolution of microseismic activities can be correlated with meteorological parameters to show the effects of temperature and rainfall on triggering the propagation of fractures probably leading to future collapse.
The take-home messages can be summarized as follows:
-
microseismic events related to fracturing propagation in rock mass (target events), as the precursor information of rockslide hazards, can be recorded by using a proper microseismic monitoring system;
-
the target events can be recognized in all the recordings by a reclassification procedure based on hypocenter location;
-
the optimal monitoring network can be designed following simple guidelines to achieve a high location accuracy;
-
the increasing risk of rockslides can be predicted on the basis of accurate spatial and temporal distribution of target events.
The perspective of the whole research is the implementation of an early warning methodology applicable to unstable rock slopes. Although this goal has not been achieved yet, the results of this work contribute to reduce the distance to the final objective and will provide valid support for scientists, technicians and decision makers to face future sustainability challenges related to rockslide hazards. Moreover, this work also contributes to fulfil the Goal 11 of SDGs, which is, in short, significantly reduce the loss in lives and property caused by disasters, including rockslide-related disasters mentioned in this research, with a focus on protecting the poor and people in vulnerable situations by 2030.
References
Hungr, O., Leroueil, S., Picarelli, L.: The Varnes classification of landslide types, an update. Landslides 11, 167–194 (2014)
Jongmans, D., Garambois, S.: Geophysical investigation of landslides: a review. Bull. Société Géologique Fr. 178(2), 101–112 (2007)
Bogoslovsky, V.A., Ogtlvy, A.A.: Geophysical methods for the investigation of landslides. Geophysics 42, 562–571 (1977)
McCann, D.M., Forster, A.: Reconnaissance geophysical methods in landslide investigations. Eng. Geol. 29, 59–78 (1990)
Hack, R.: Geophysics for slope stability. Surv. Geophys. 21, 423–448 (2000)
Pazzi, V., Morelli, S., Fanti, R.: A review of the advantages and limitations of geophysical investigations in landslide studies. Int. J. Geophys. (2019)
Arosio, D., Longoni, L., Papini, M., Scaioni, M., Zanzi, L., Alba, M.: Towards rockfall forecasting through observing deformations and listening to microseismic emissions. Nat. Hazards Earth Syst. Sci. 9, 1119–1131 (2009)
Amitrano, D., Grasso, J.R., Senfaute, G.: Seismic precursory patterns before a cliff collapse and critical point phenomena. Geophys. Res. Lett. 32, 1–5 (2005)
Senfaute, G., Duperret, A., Lawrence, J.A.: Micro-seismic precursory cracks prior to rock-fall on coastal chalk cliffs: a case study at Mesnil-Val, Normandie, NW France. Nat. Hazards Earth Syst. Sci. 9, 1625–1641 (2009)
Walter, M., Schwaderer, U., Joswig, M.: Seismic monitoring of precursory fracture signals from a destructive rockfall in the Vorarlberg Alps. Austria. Nat. Hazards Earth Syst. Sci. 12, 3545–3555 (2012)
Arosio, D., Longoni, L., Papini, M., Zanzi, L.: Analysis of microseismic activity within unstable rock slopes. In: Scaioni, M. (ed) Modern Technologies for Landslide Monitoring and Prediction, pp. 141–154. Springer, Berlin, Heidelberg (2015)
Spillmann, T., Maurer, H., Green, A.G., Heincke, B., Willenberg, H., Husen, S.: Microseismic investigation of an unstable mountain slope in the Swiss Alps. J. Geophys. Res. Solid Earth 112, 1–25 (2007)
Blikra, L.H.: The Åknes rockslide; monitoring, threshold values and early-warning. In: Landslides and Engineered Slopes. From the Past to the Future Proceedings of the 10th International Symposium on Landslides and Engineered Slopes, p. 2124 (2008)
Amitrano, D., Arattano, M., Chiarle, M., Mortara, G., Occhiena, C., Pirulli, M., Scavia, C.: Microseismic activity analysis for the study of the rupture mechanisms in unstable rock masses. Nat. Hazards Earth Syst. Sci. 10, 831–841 (2010)
Helmstetter, A., Garambois, S.: Seismic monitoring of schilienne rockslide (French Alps): analysis of seismic signals and their correlation with rainfalls. J. Geophys. Res. Earth Surf. 115, 1–15 (2010)
Codeglia, D., Dixon, N., Fowmes, G.J., Marcato, G.: Strategies for rock slope failure early warning using acoustic emission monitoring. In: IOP Conference Series: earth and Environmental Science, vol. 26 (2015)
Colombero, C., Comina, C., Vinciguerra, S., Benson, P.M.: Microseismicity of an unstable rock mass: from field monitoring to laboratory testing. J. Geophys. Res. Solid Earth 123, 1673–1693 (2018)
Tweeton, D.R.: GeoTomCG, Three dimensional geophysical tomography software, Apple Valley, Minnesota: GeoTom LLC (2012)
Zhao, D., Hasegawa, A., Horiuchi, S.: Tomographic imaging of P and S wave velocity structure. J. Geophys. Res. 97, 19909–19928 (1992)
Lomax, A., Michelini, A., Curtis, A.: Earthquake location, direct, global-search methods. In: Meyers, R.A. (ed) Encyclopedia of Complexity and Systems Science, pp. 2449–2473, Springer (2009)
Font, Y., Kao, H., Lallemand, S., Liu, C.S., Chiao, L.Y.: Hypocentre determination offshore of eastern Taiwan using the maximum intersection method. Geophys. J. Int. 158, 655–675 (2004)
Zhang, Z., Arosio, D., Hojat, A., Zanzi, L.: Tomographic experiments for defining the 3D velocity model of an unstable rock slope to support microseismic event interpretation. Geoscience 10, 327 (2020)
Zhang, Z., Arosio, D., Hojat, A., Zanzi, L.: Reclassification of microseismic events through hypocenter location : case study on an unstable rock face in Northern Italy. Geoscience 11, 37 (2021)
Zhang, Z., Arosio, D., Hojat, A., Zanzi, L.: Optimal design for expanding a microseismic monitoring network on an unstable rock face in Northern Italy. In: EAGE 4rd Asia Pacific Meeting Near Surface Geoscience & Engineering. Ho Chi Minh, Vietnam (2021)
Acknowledgements
I am grateful to my three supervisors Prof. Luigi Zanzi, Dr. Diego Arosio, Dr. Azadeh Hojat for their help throughout this thesis. This research was funded by China Scholarship Council (CSC), grant number 201606420051, to support me during my research activities in Italy.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 The Author(s)
About this chapter

Cite this chapter
Zhang, Z. (2022). Characterization and Monitoring of an Unstable Rock Face by Microseismic Methods. In: Antonelli, M., Della Vecchia, G. (eds) Civil and Environmental Engineering for the Sustainable Development Goals. SpringerBriefs in Applied Sciences and Technology(). Springer, Cham. https://doi.org/10.1007/978-3-030-99593-5_8
Download citation
DOI: https://doi.org/10.1007/978-3-030-99593-5_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-99592-8
Online ISBN: 978-3-030-99593-5
eBook Packages: EngineeringEngineering (R0)