
Abstract
Wildland fuels, defined as the combustible biomass of live and dead vegetation, are foundational to fire behavior, ecological effects, and smoke modeling. Along with weather and topography, the composition, structure and condition of wildland fuels drive fire spread, consumption, heat release, plume production and smoke dispersion. To refine inputs to existing and next-generation smoke modeling tools, improved characterization of the spatial and temporal dynamics of wildland fuels is necessary. Computational fluid dynamics (CFD) models that resolve fire–atmosphere interactions offer a promising new approach to smoke prediction. CFD models rely on three-dimensional (3D) characterization of wildland fuelbeds (trees, shrubs, herbs, downed wood and forest floor fuels). Advances in remote sensing technologies are leading to novel ways to measure wildland fuels and map them at sub-meter to multi-kilometer scales as inputs to next-generation fire and smoke models. In this chapter, we review traditional methods to characterize fuel, describe recent advances in the fields of fuel and consumption science to inform smoke science, and discuss emerging issues and challenges.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
2.1 Introduction
Fuels, topography, and weather comprise the classic fire behavior triangle (Chap. 3). Fuels are the only one of the three variables that can be managed to influence fire behavior before an ignition occurs. In their most basic form, wildland fuels are the combustible biomass of live and dead vegetation. Because combustion of wildland fuels generates heat and emits pollutants, fuels science is a critical foundation of fire behavior and smoke modeling (Anderson 1976; Omi 2015; Keane 2019).
Along with weather and topography, characteristics of fuels that burn in a wildland fire event will drive fire spread, energy release, fuel consumption, and smoke production (Ottmar 2014). For example, a dry grassland with continuous cover can generate fast-moving fires with short-duration smoke production (Cook et al. 2016). In contrast, dense mixed-conifer forests with deep organic soils can support crown fires with large plume development followed by inefficient smoldering combustion in coarse wood and organic soil layers associated with long-duration smoke production (de Groot et al. 2007).
2.1.1 Understanding How Fuels Contribute to Smoke
A detailed accounting of how wildland fuels contribute to fire behavior and combustion is thus fundamental for smoke model predictions. Smoke emissions estimates are based on type and mass of fuel consumed, which is then used to determine smoke composition through emission factors for specific fuel categories (Urbanski 2014; Chap. 5). Each step of the smoke modeling process relies on source characterization of the composition and biomass of fuels and consumption in a wildland fire event (see Fig. 5.7). Because fuels are dynamic over space and time, any effort to quantify fuels must be informed by the ecology of live and dead vegetation (Mitchell et al. 2009; Keane 2015). Of all variables involved in estimating smoke emissions, the amount of available fuel and proportion that is consumed are often the highest sources of uncertainty. Errors in estimates of available pre-burn fuels can create potentially large errors when estimating emissions due to fuel consumption (Peterson 1987). Reliable estimates of fuels also generally require more detailed site information than is provided by remotely sensed imagery and classified vegetation cover and type. For example, fuels that burn in a forest fire are often obscured by forest canopies and are strongly dictated by past disturbances or management activities (Keane 2015; Prichard et al. 2019a). Passive remote sensing imagery may provide operational maps of forest cover but cannot quantify the amount, structure, or condition of sub-canopy fuels that drive fire behavior and consumption (Keane et al. 2001).
Current geospatial datasets of wildland fuels, which are based on remote sensing, generally have a high degree of uncertainty (e.g., LANDFIRE; Keane et al. 2006; Reeves et al. 2006). The increased availability of remotely sensed datasets that enable 3D mapping of pre- and post-fire vegetation and fuels at multiple scales is contributing to a rapid evolution in the field of fuel characterization and consumption (Loudermilk et al. 2009; Wang and Glenn 2009; Hoff et al. 2019; Hudak et al. 2020). Next-generation fuel characterization will need to be at scales and resolutions appropriate for physics-based computational fluid dynamics (CFD) models that are capable of resolving fire–atmosphere interactions, heat release, and smoke production (Loudermilk et al. 2009; Rowell et al. 2016). Understanding the sources of uncertainty of aggregating fine-scale fuel characterization and consumption to the coarser scales used in smoke modeling and planning is an important area of study. For example, distribution of downed logs and stumps may vary at fine spatial scales (Brown 1974; Keane 2015), but reliable estimates of their consumption across burn units may be critical to anticipating long-term smoke impacts (Chaps. 3, 5 and 6).
Reliable fuel characterization is also needed to guide prescribed burn planning where fire managers need to take into account and mitigate potential smoke impacts to communities (Lavdas 1996). As timber harvest, mechanical fuel reduction, and prescribed burning modify fuels, fuel characterization after such treatments is critical for assessing effectiveness and how these activities influence fire behavior and smoke production (Reinhardt et al. 2008; Stephens et al. 2012).
Site-specific inventories of fuels and their predicted contribution to flaming and smoldering phases of fire inform forecasts used by fire managers during wildland fire events. If prescribed fire managers are aware of deep organic soil layers and large amounts of coarse wood that could contribute to long-term smoldering and low-buoyancy smoke production, they can model potential impacts and adjust burn prescriptions and mop-up procedures to mitigate associated impacts to air quality. The amount of consumption by combustion phase and duration of combustion (Ottmar 2014) directly influences smoke production, plume dynamics (Chap. 4), emissions (Chap. 5), carbon fluxes, tree mortality, soil heating, and other vegetation dynamics (Keane 2015). Furthermore, the amount and types of fuel consumed in flaming, smoldering and long-term smoldering (or glowing) phases of combustion are necessary for predicting emissions of specific pollutants (e.g., CO, PM2.5) (Chaps. 5and 6) and for anticipating smoke intrusions into communities (Peterson et al. 2018).
This chapter presents the current state of science for estimating the amount of wildland fuel and consumption as related to smoke management and future research needs. Topics covered include (1) an introduction to wildland fuels, (2) the current state of science on fuel characterization and consumption, (3) a vision for fuel and consumption science to inform smoke prediction, and (4) emerging issues and challenges in the field of fuel characterization and consumption research. Because source characterization of wildland fuels is critical to predicting smoke impacts, reviewing how to measure and map wildland fuel biomass and consumption provides useful context for fire and fuels managers, smoke scientists, and policy makers. We also review advances that are necessary for next-generation models of wildland fire behavior and smoke.
2.2 Wildland Fuels
Wildland fuels are often characterized as fuelbeds that are stratified by structure, continuity, and composition of biomass including tree canopies, snags, shrub stems and leaves, grass and herbaceous vegetation, sound and rotten wood, needle and leaf litter, and organic ground fuels (Ottmar et al. 2007). Numerous ecological processes influence wildland fuel dynamics, but four are particularly important in governing spatial and temporal distributions of wildland fuels (Keane 2015):
-
Wildland fuels accumulate from the establishment, growth, phenology, and mortality of vegetation (development). The rate of biomass accumulation, or productivity of vegetation, is dictated by interactions of the plant species available to occupy a site and the physical environment (climate, soils, and topography).
-
Over time, portions of living biomass shed or die and are deposited on the ground to become dead surface fuels, termed necromass.
-
Below- and above-ground necromass is eventually decomposed by microbes and soil macrofauna.
-
Disturbances, such as fire, insects, and disease, act on living and dead biomass to change the magnitude, trend, and direction of fuel accumulation in space and time.
These four processes interact to influence fuel development where the interactions depend on the ecosystem and corresponding climate and disturbance regimes. For example, live and dead vegetation characteristics often correlate to development and deposition, whereas climate drives decomposition and disturbance (Keane 2008). Vegetation is sometimes used as a surrogate for fuels (Keane et al. 1998; Menakis et al. 2000), but this assumption ignores the pivotal role of decomposition and disturbance on fuelbed development.
Wildland fuel properties and their distributions are a cumulative result of interactions of the four above processes across multiple spatial and temporal scales that create shifting mosaics of fuel conditions on fire-prone landscapes (Keane et al. 2012). The processes can also create heterogeneity in fuel loading and structure. For example, loading (biomass per unit area; kg m−2) of fine woody debris can vary by 2–3 times its mean over a small (<10 ha) prescribed burn unit (Keane et al. 2012).
The spatial and temporal variability of wildland fuels can influence how fuel consumption influences smoke emissions (Anderson 1976) and, in turn, how fuel management influences fuel properties (Stephens et al. 2012). Because fuel dynamics are so heterogeneous, robust fuel classifications, sampling methods, and geospatial datasets are needed to improve predictions of fuel consumption and smoke production (Parsons et al. 2010; Keane 2015). Spatial configuration of fuel characteristics is needed for next-generation fire effects and behavior models that rely on 3D fuel inputs and represent fire with CFD modeling (Linn et al. 2002; Mell et al. 2007; King et al. 2008; Parsons et al. 2010). This variability, combined with uncertainty of fuel sampling techniques, makes estimating accurate fuel loadings for smoke prediction challenging.
2.2.1 Fuel Characteristics
The wildland fuelbed is generally divided into three vertical fuel layers including canopy, surface, and ground fuels (Keane 2015). Canopy fuels are the biomass above the surface fuel layer (>2 m high). Surface fuels generally include biomass within 2 m above the ground surface. Ground fuels are all organic matter below the ground line, where the ground line is usually just below the litter (Oi soil horizon, slightly decomposed) and include the Oe (moderately decomposed), and Oa (highly decomposed) soil horizons (collectively, “duff”) (Soil Science Division Staff 2017).Footnote 1 Each fuelbed layer is composed of finer-scale elements called fuel strata and categories (Fig. 2.1).

[Drawing by Ben Wilson, from Keane (2015)]
Vertical fuel strata in a wildland fuelbed
Fuel strata describe the vertical profile of the wildland fuelbed, whereas fuel categories describe fuel types that are qualitatively and quantitatively defined for specific purposes or objectives, such as fire behavior prediction (Table 2.1). For example, the downed wood stratum often contains fuel categories including fine wood (<8 cm diameter), coarse wood (>8 cm diameter), stumps, and piles (Riccardi et al. 2007b). Fuels in the fine wood category are generally consumed during the flaming phase and drive fire spread, whereas coarse wood burns during the flaming phase of combustion but the majority of consumption is in smoldering combustion that occurs long after the passage of the flaming front, contributing to long-duration heat release and smoke (Albini 1976; Hyde et al. 2011).
Fuel strata and categories have specific physical and chemical properties, such as bulk density, loading (mass per area, kg m−2), surface area (m2), and heat content (J kg−1), all of which are important inputs to fire behavior and effects models and descriptors of fuel characteristics (Chap. 3). The finest scale of fuel description is the fuel particle, which is a general term for a specific piece of fuel that is part of a fuel category. A fuel particle can be an intact or fragmented woody stick, grass blade, shrub leaf, or pine needle. Fuel particles have the widest diversity of properties, such as specific gravity (kg m−3), heat content (J kg−1), volume (m3), and shape (unit or quality here). The properties of fuel categories, strata and fuelbeds, are often quantified from statistical summaries of properties of the particles that comprise them, thereby a source of uncertainty. For example, the means of quadratic mean diameter and surface area-to-volume ratio (m−1) of all particles are often applied to size classes of wood particles (e.g., Brown 1974).
Within any given fuel strata, component or particle, wildland fuels are also defined as dead or live. Dead fuel is suspended or downed dead biomass (necromass), and live fuel is the biomass of living organisms including vascular plants (trees, shrubs, and herbs) and nonvascular plants such as mosses and ground lichens. The principal reason for distinguishing between live and dead fuels is the difference in fuel moisture dynamics that dictates the availability to burn, often called fuel condition. Both live and dead fuel properties are governed by antecedent weather, but live fuel moistures are primarily controlled by phenology, transpiration, evaporation, and soil water, which differ among taxa and across regional climate (Jolly et al. 2014). In contrast, dead fuel moisture is dictated by the physical properties of the fuel (e.g., size, density, surface area) and their interaction with local climate, short-term weather dynamics (wind, solar radiation and vapor pressure deficit), and available soil moisture (Fosberg et al. 1970; Viney 1991).
The 3D configuration of wildland fuels characterizes where fuels are and where they are not. Gaps in fuel structure influence fire spread, including whether a forest can support transitions from surface to crown fires (i.e., individual or group torching) and how readily fires can spread from tree crown to tree crown (crowning that is independent of surface fire dynamics) (Parsons et al. 2017; Ziegler et al. 2017). The spatial continuity of surface fuels also affects fire behavior. For example, although deserts and xeric rangelands may support vegetation that is dry enough to ignite, fire spread is unlikely due to sparse fuels and lack of continuity (Gill and Allan 2008; Swetnam et al. 2016).
2.2.2 Traditional Methods to Estimate Wildland Fuel Loadings
Numerous methods have been developed to estimate fuel loading (i.e., combustible biomass) to allow for flexibility in matching available resources with sampling objectives and constraints (Catchpole and Wheeler 1992). Keane (2015) reviewed traditional fuel sampling methods and the inherent challenges in measuring spatial and temporal variability of wildland fuels. Here, we summarize the main methods and review practical sampling limitations that are prompting evaluation of new technologies and methods.
Many traditional approaches to wildland fuel characterization rely on a variety of indirect methods to estimate loading and structure of wildland fuels. Methods such as photo series or mapping fuels based on major vegetation types rely on visual or associative techniques to relate fuel characteristics to available observations or datasets (Keane 2015). Associating fuel characteristics with remotely sensed products, such as Landsat Thematic Mapper, has limitations due to imagery resolution and forest and shrub canopies that obscure surface and ground fuels. In addition, high variability of fuel characteristics within a site or pixel may overwhelm unique fuelbed identification across sites (Keane et al. 2013; Prichard et al. 2019a). Another common method is to simplify fuel descriptions into fire behavior fuel models or broad vegetation types for fire simulations (Scott and Burgan 2005). Fuel models generally are too simplistic to represent the complexity of wildland fuels and ignore categories important to smoke and other fire effects such as coarse wood and organic soils (Sikkink and Keane 2008; Keane 2015).
Direct methods involve field sampling or measuring characteristics of fuel particles in situ or in the lab to calculate loading and usually involve direct contact with the fuel (e.g., measuring dimensions and weight of particles). Within fixed-area plots, mass is often measured using destructive sampling, which involves physically clipping and collecting the fuel, then drying the material and weighing it (Mueller-Dombois and Ellenberg 1974; Sokal and Rohlf 1981). Methods for sampling litter and ground fuel loading have remained virtually unchanged over the last four decades (Brown et al. 1985; DeBano et al. 1998) and include destructive sampling and estimations based on depth measurements.
Some ecosystems may have patchy soil organic matter coverage (e.g., deserts, woodlands, sagebrush, grasslands), making sampling difficult and often requiring a field measurement of ground fuel and litter cover. Several factors affect the accuracy and precision of estimates for monitoring and calculations of ground fuel consumption. First, the spatial variability of litter often requires a high number of measurements. Depth measurements are challenging because the interface between the duff and litter layers can be diffuse. Sampling also disrupts the ground fuel layer and can compromise pre- and post-fire measurements. Discontinuities in some litter and ground fuels are also challenging to quantify, including animal scat, mineral content, tree cones, and basal accumulations (Ottmar et al. 2007). Finally, reliable bulk density values are lacking for many fuelbeds in North America, and accurate characterization of litter and ground fuel loading require destructive sampling to include depth and bulk density measurements.
Due to the high spatial variability of wildland fuels and lack of correlation between fuel strata and categories, estimations based on traditional fuel measurement techniques often result in high variance and lack of precision (Keane 2013). For example, planar intersect sampling of woody fuel loadings incorporates only one dimension (Brown 1971). Given that fine and coarse wood can vary differently across space, linear sampling may not capture spatial variability of fine and coarse wood (Keane and Gray 2013). Other conventional fuel inventory techniques, such as photo series, may also be inappropriate because fuels vary at spatial scales that might be different from the scales represented by the photo (Keane and Gray 2013).
Many fuel assessments involve sampling fuels before and after treatment, especially when estimating fuel consumption. Making consistent measurements is challenging because accurate fuel sampling involves direct manipulation of the fuelbed. For example, destructive sampling removes fuel from a fixed-area plot, rendering the plot unusable for post-fire monitoring. High variability of fuels may preclude paired sampling (i.e., plots outside the treatment area used to quantify pre-treatment conditions) or quantifying pre-burn conditions using classification, mapping, and modeling. Accurate and consistent sampling methods are needed to sample fuels for the same sampling frame throughout the monitoring period. Some have used the photoload method (Keane and Dickinson 2007) as a way to sample fuels within a sample frame without disturbance with mixed results (Tinkham et al. 2016).
2.2.3 Emerging Technologies and Methods
Advances in remote sensing offer a number of promising methods to characterize wildland fuels including airborne and ground-based light detection and ranging (Lidar) and structure-from-motion photogrammetry (SfM) (Loudermilk et al. 2009; Hudak et al. 2016; Cooper et al. 2017) that allow for synoptic, 3D characterization of many wildland fuels.
Ground-based Lidar, also known as a terrestrial laser scanning (TLS), is used to estimate the loading and structure of surface and sub-canopy fuels (Loudermilk et al. 2009; Seielstad et al. 2011). Mounted on a tripod or vehicle, TLS units obtain scan distances at sub-cm scales from the instrument location to vegetation, surface fuel, and other object surfaces and can penetrate through foliage layers. The Lidar signal, which amounts to a 3D cloud of X, Y, and Z points, can then be related to fuel loading by constructing statistical models where destructively sampled loadings for various categories are correlated to statistical metrics derived from the Lidar point cloud data (Fig. 2.2). It can be difficult to differentiate between fuel categories using TLS in heterogeneous fuelbeds, and integration with multispectral imagery is sometimes necessary for image interpretation. The cost of TLS instruments and image processing generally relegates their use to research.

Example of pre-fire TLS-derived fuel mass for (a) managed forest plots (Rowell 2017) and b post-fire residual fuels for the same site. This dataset demonstrates variability of fuels consumption for prescribed fire, where 3D structure, ignition pattern, fuel moisture and fluid flow of air affect how fire consumes fuels
Airborne Lidar scanning (ALS) is used operationally for precision forest inventory of tree stems and crowns. Its coarser resolution (9–12 returns per m2) as well as the influence of overstory objects and noise limits its ability to adequately characterize understory and surface fuels, especially through an overstory forest canopy (Hudak et al. 2016a, b). Active Lidar remote sensing adds a vertical dimension to other remotely sensed datasets, because it can penetrate vegetation biomass and characterize pre- and post-burn vegetation structure, biomass, and fuel consumption (Lefsky et al. 2001; Hyde et al. 2007; Sexton et al. 2009). Lidar offers advances in forest biomass mapping, because physical measures of canopy height and density can be extracted from point cloud data and reduce the uncertainties in biomass (i.e., fuel load) estimation. Neither Lidar nor other remote sensing systems can penetrate the forest floor to measure litter and ground fuel depth, although recent work suggests that robust estimates of the litter-layer fuel mass are possible (Rowell et al. 2020).
SfM technology uses photogrammetry of high-resolution images, often collected from cameras mounted on an unmanned aerial system (UAS) to create 3D multi-spectral images of vegetation and fuels (Zarco-Tejada et al. 2014). Although photogrammetric points have inferior vegetation penetration compared to Lidar, the multi-spectral capabilities of digital cameras make assignment of plant functional type or live/dead status more feasible than from the single near-infrared or green channel data in most Lidar sensors (Bright et al. 2016; Hudak et al. 2020). Integrating short-range SfM using digital cameras, mobile phones, or high definition (4K) digital video allows for fine-scale, 3D representations of wildland fuels in true color or multispectral images (Wallace et al. 2019). Once calibrated with field-based measurements, these datasets can provide 3D mapping of live and dead canopy and surface fuel loading and structure with applications for biomass mapping, fire behavior modeling, and fuel consumption measurements (Figs. 2.3 and 2.4).

Structure from motion point cloud generated for a mixed conifer site (roughly 500 m by 500 m in size) at the Lubrecht Experimental Forest, Montana

Multi-spectral orthophoto mosaic, approximately 100 × 100 m in size, generated from unmanned aerial system imagery collected at the Lubrecht Experimental Forest, Montana, demonstrating potential discrimination between live fuels (shown as red tree crowns and surface vegetation) and downed dead wood (linear blue objects)
Highly resolved spatial data from TLS and SfM expand sampling beyond the domains of traditional destructive plots and planar intersect fuel surveys. As data from TLS and SfM images can be sampled at high resolution, they can be merged into 3D point clouds for fine-scale mapping and quantification of live and dead surface and canopy fuels. TLS excels at capturing detailed pre- and post-fire 3D data that represent continuous changes in estimates of bulk density at fine scales (Rowell et al. 2016; Hudak et al. 2020). Such spatially explicit fuels consumption data provide linkages between fire behavior and smoke production by describing interactions that produce smoke from a range of fire types and behavior (Moran et al. 2019).
2.3 Fuel Consumption
Fuels are consumed in a complex set of combustion phases that differ with each wildland fire (Ottmar 2014). Because different fuel categories (i.e., tree crowns, shrubs, herbs, downed wood, litter, and ground fuels) have different propensities to burn, consumption varies across time and space (Weise and Wright 2014). Fuel type and condition, moisture content, arrangement, and ignition patterns affect the amount of biomass consumed.
Fuel consumption is the amount of fuel that is consumed during all combustion phases. During combustion, vegetative matter is decomposed through a thermal/chemical reaction where plant organic material is rapidly oxidized producing carbon dioxide, water, and heat (Byram 1959; Johnson and Miyanishi 2001). During the pre-ignition phase, pyrolysis occurs first and is the heat-absorbing reaction that removes moisture and converts fuel elements such as cellulose into char, carbon dioxide, carbon monoxide, water vapor, combustible vapors and gases, and particulate matter (Kilzer and Broido 1965). Flaming combustion follows as the escaping organic hydrocarbon vapors released from the surface of the fuels burn (Williams 2018) (Fig. 2.5). Combustion efficiency is usually high if volatile emissions remain near the flames.

Representative photos of a flaming and smoldering of surface fuels (flaming dominates), b flaming and smoldering of large log and surrounding grass and litter (smoldering dominates) and c short- and long-term smoldering (glowing) phases of combustion in a large log (long-term smoldering dominates) (Photos by Roger Ottmar)
During the smoldering phase, emissions of combustible gases and vapors above the fuel are insufficient to support a flame (Ohlemiller 1986; Johnson and Miyanishi 2001) (Fig. 2.5). Gases and vapors condense, appearing as visible smoke as they escape into the atmosphere; smoke consists mostly of particles <1.0 μm diameter. The amount of particulate emissions generated per mass of fuel consumed during the smoldering phase, generally expressed as an emission factor (Chap. 5), is more than double that of the flaming phase. Smoldering combustion is more common in densely packed and highly lignified fuel types (e.g., organic soils and decayed logs) due to the lack of oxygen necessary to support flaming combustion. For example, deep ground fuel, such as peatland soils, can smolder for weeks, contributing greatly to smoke emissions (Rappold et al. 2011). In boreal ecosystems, approximately 90% of emissions can be attributed to burning of deep ground fuel characterizing peatland soils. Given these impacts, methods of quantifying depth of burn and its spatial variability are critical (van der Werf et al. 2010; Thompson and Waddington 2014).
Because heat generated from smoldering is seldom sufficient to sustain an active convection column, smoke often concentrates in nearby drainages and valley bottoms, compounding the effect of the fire on local air quality (Chap. 5). Smoldering combustion is less prevalent in fuels with high surface-area-to-volume ratios (e.g., grasses, shrubs, small-diameter woody fuels) (Sandberg and Dost 1990). Near the end of the smoldering phase, pyrolysis nearly ceases, leaving unconsumed fuel as black char. This is often referred to as the glowing or residual smoldering phase (DeBano et al. 1998).
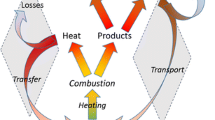
Combustion phases occur both sequentially and simultaneously as a fire front moves across the landscape. Combustion efficiency is rarely constant, resulting in a different set of chemical compounds being released at different rates into the atmosphere during each combustion phase (Fig. 2.6) (Ferguson and Hardy 1994). The flaming stage has a high combustion efficiency and generally emits the least amount of PM2.5 emissions relative to fuel mass consumed. The smoldering phase has a lower combustion efficiency, producing more PM2.5 relative to fuel mass consumed.

Conceptual diagram of combustion efficiency over time and combustion phase. The red dotted line represents a fire event with a large burned area; the orange dotted line represents a small fire that is constrained by local inversions and has minimal combustion efficiency; the gray dotted line represents a low-intensity prescribed fire
The surface-area-to-volume ratio of fuels also influences the amount of fuel consumed. Smaller particles (e.g., grass and small twigs) require less heat to ignite and combust compared to larger fuel particles (e.g., large logs). Small particles generally burn during the flaming stage, and larger fuels often burn during the smoldering stage. Fuel geometry also determines moisture uptake and release from individual particles. For example, particles with high surface-area-to-volume ratios such as grass can absorb and release moisture quickly compared to fuels with low surface-to-volume ratios.
The compactness of fuel particles in fuelbeds can enhance or diminish fuel consumption and affect smoke emissions. Packing ratio—the fraction of the fuelbed volume occupied by organic material—is a measure of fuelbed compactness. A loosely packed fuelbed (low packing ratio), such as a sparse grassland or shrubland, has ample oxygen for combustion but may inefficiently transfer heat between burning and adjacent unburned fuel particles. Alternatively, a dense fuelbed (high packing ratio), such as decayed soil organic matter, can efficiently transfer heat between the particles, but low availability of oxygen reduces consumption and combustion efficiency.
Fuel continuity also affects fuel consumption. Sustained ignition and combustion continue only if fuel particles are close enough that heat can be transferred between particles, allowing combustion to occur. For example, piles of branches and leaves are often optimally packed with particles close enough for adequate heat transfer with large enough spaces between particles for oxygen availability. As a result, pile burning, when appropriately executed, often results in nearly complete combustion (Hardy 1996).
Canopy fuels exemplify the importance of particle size and surface-to-volume ratio in determining fuel consumption. Severe crown fires burn tree crowns and generally leave boles and large branches behind. Even under extreme fire conditions, live tree boles and large branches are not generally available to burn due to their low surface area and high moisture. In fire behavior modeling, canopy bulk density is used to quantify available canopy fuel. The diffuse distribution of canopy bulk density makes it difficult to measure with traditional methods. However, Lidar and other 3D point-cloud data offer promising approaches for characterizing pre- and post-burn canopy fuel (Skowronski et al. 2011, 2020).
2.3.1 Indirect Estimates of Fuel Consumption
Consumption of wildland fuels can be measured directly by measuring pre and post-fire loadings (Ottmar 2014), but because of time and labor constraints, it is typically estimated from indirect, or non destructive, measurements that use remote sensing to map consumption in 2D or 3D. To reduce uncertainties in estimated consumption for smoke modeling, pre- and post-fire fuel measurements ideally would be co-located rather than selecting proxy sites to represent pre-burn fuels.
Predictive models are commonly used to estimate fuel consumption based on pre-burn fuel loadings. CONSUME (Prichard et al. 2007) and the First Order Fire Effects Model (FOFEM; Reinhardt et al. 1997) are used operationally for prescribed burn planning to predict fuel consumption, heat release, and emissions. They can also estimate fuel consumption based on remotely sensed maps of area burned and pre-burn fuel loadings. For example, the Fuel Characteristic Classification System (FCCS) (Ottmar et al. 2007; Riccardi et al. 2007a, 2017b) supports fuelbed datasets that are available as a map layer within LANDFIRE, based on crosswalks to existing vegetation type (https://www.landfire.gov/evt.php). Fuelbed data from FCCS can be used as inputs to CONSUME or FOFEM to estimate fuel consumption for a burned area or planning unit. Model predictions can be improved with field-based observations to refine fuelbed assignments or pre-burn fuel loading values.
Consumption can also be estimated using a satellite-derived estimate of biomass burned (M, g) from pre- and post-burn imagery in the classic equation (Seiler and Crutzen 1980; Kaufman et al. 1989; Wooster et al. 2005):
where A is burned area (m2) measured from imagery, B is biomass (fuel load) per unit area (g m−2) estimated from pre- and post-burn imagery, and ß is the burning efficiency or combustion factor (fraction of fuel burned) (Vermote et al. 2009).
Burning efficiency, the amount of fuel that burns, is coupled to intrinsic fuel conditions (type, physical arrangement, chemical composition, and fuel moisture) and extrinsic abiotic factors, such as weather conditions (temperature, relative humidity, and wind), that vary at daily and seasonal time-scales. These factors must be measured or modeled on site close to the time of burning, then inputted into consumption models to constrain the efficiency of simulated combustion to conditions at the time of burning (Ottmar 2014).
Burned area (A) can be estimated from airborne or satellite imagery, although estimations will differ depending on the scene, the type of imagery used (van der Werf et al. 2006), and the algorithms applied (Roy et al. 2005). Multispectral satellite imagery is commonly used for burned area mapping (Lentile et al. 2006; Hudak et al. 2007). With the many satellites in orbit today, errors in burn area estimation can be reduced by using post-fire imagery with higher spatial resolution (250 m or better) and shorter latency (daily or sub-daily) after fire.
Biomass (B) can also be estimated from optical imagery but with less certainty (Tucker 1977; Sellers 1985; Gitelson and Merzlyak 1997; Thenkabail et al. 2000). In multilayered forest canopies with high leaf area index (leaf area per unit ground area), passive optical sensors saturate and lose sensitivity, reducing the utility of spectral indices such as normalized difference vegetation index (NDVI) or normalized burn ratio (NBR) (Goel and Qin 1994; Haboudane et al. 2004; Hudak et al. 2007).
Because canopy biomass is often correlated to canopy height, statistical metrics calculated from the distribution of height measures provided by airborne Lidar can be used to estimate biomass and other forest structure attributes such as stem density, basal area, and volume (Lefsky et al. 1999, 2002; Hudak et al. 2008; Dubayah et al. 2010; Silva et al. 2016, 2017).
Canopy height and density information based on Lidar-based 3D point cloud data can be converted to 2D raster maps (with height and density attributes) that are more easily manipulated and processed with geospatial analysis. Fuel biomass density can be estimated from airborne Lidar resampled to 30-m resolution bins, commensurate with LANDFIRE fuel maps (Hudak et al. 2016b), or as fine as 5-m resolution (Hudak et al. 2016a). Ground-based TLS can be used at scales down to 10 cm. At this fine grain size, it is feasible to differentiate fuel components that are a heterogeneous mixture of materials (or species), each with their own emission factor (EF) (Chap. 5). For finer scales, Eq. 2.1, which predicts the amount of consumed biomass (M, g) at the level of individual fuel components (or species) x (Seiler and Crutzen 1980; Brönnimann et al. 2009), can be revised to
In the fine-scale 3D domain, fuel volume (V, m−3) can be substituted for area A (m−2), and fuel bulk density (BD, g m−3) can be substituted for biomass (B) density (g m−2), traditionally characterized in 2D, to estimate M (g), the mass of emissions due to consumption of fuel component (or species) x.
Terrestrial Lidar has also been used to estimate shrub consumption. Hudak et al. (2020) demonstrated that 3D estimates of shrub volume, combined with co-located field measures of bulk density, can provide spatially explicit estimates of vegetation bulk density. Comparison of pre- and post-fire 3D fuel maps can provide 3D maps of consumption, although at slightly coarser resolution, given errors in co-registration between pre- and post-fire maps.
2.3.2 Direct Measures of Fuel Consumption
Direct measurements of heat flux using thermal imagery can be calibrated to estimate consumption rates and to map consumption which are important for smoke prediction. The rate of biomass loss (i.e., consumption) is linearly related to the rate of heat flux from an active fire (Wooster et al. 2005; Freeborn et al. 2008; Smith et al. 2013). Heat flux can be measured remotely from the thermal infrared radiation emitted by the fire, which amounts to 10–20% of the total heat flux (Byram 1959). Temperatures of heat sources, as measured by calibrated thermal infrared sensors, can be converted to fire radiative power (FRP, W), which equates to Joules per second (J s−1). Continuous measurements of FRP over the duration of the fire can be integrated with respect to time(s) to estimate total heat flux, also known as fire radiative energy (FRE) in J (Fig. 2.7). The integral of the FRP time series can be approximated (Boschetti and Roy 2009) as
where time t is the time in seconds (s) for each FRP observation i in the time series (Wooster et al. 2013). This integration can be applied to every pixel in a multi-temporal stack of FRP observations to produce an FRE image that estimates total consumption (Hudak et al. 2016a; Klauberg et al. 2018).

Using digital thermography from an unmanned aerial system platform, high fidelity FRE and rate of spread can be extracted from these data. Moran et al. (2019) demonstrate the utility of these platforms, describing the points of head, flanking and backing fire (Image used with permission from the author)
Comparisons between the (direct) FRE approach to estimating fuel consumption and the (indirect) approach to consumption estimates derived from remotely sensed burn area (A) and pre-fire fuel biomass (B) measurements by Eqs. 2.1 and 2.2 are reasonably linear (Roberts et al. 2009; Wooster et al. 2013). The relationship scales because it is linear, permitting a simplification of Eq. 2.2:
where C is a “combustion factor” (g kJ−1) for a given vegetation fuel type (x).
Accuracy of FRE-derived estimates of consumption depends on the frequency of FRP observations and whether they span the full duration of the fire, including the flaming and smoldering phases of combustion. Thermal sensors mounted on fixed-wing aircraft can image a given site for only a few seconds, separated by several minutes needed to turn the aircraft around and re-image the same location on the fire (Hudak et al. 2016a; Klauberg et al. 2018). Visible and near-infrared (NIR) sensors can capture flame location and geometry and distinguish flaming combustion from residual smoldering combustion. The dual-band technique, using both mid-wave infrared (MWIR) and longwave infrared (LWIR) wavelengths, provides for more robust FRP estimation than using MWIR or LWIR alone (Dozier 1981).
Current measurement technologies are unable to partition the FRP signal between different fuel components burning simultaneously within the same pixel space. For surface fires beneath forest canopies, the FRP signal may be attenuated from overstory canopy occlusion, which may differ with canopy cover (Mathews et al. 2016). Correcting for canopy occlusion may be possible through Lidar-derived canopy structure (Hudak et al. 2016a).
2.4 Gaps in Wildland Fuels Characterization
Until recently, a major gap in our understanding of wildland fuels has been a lack of spatial dimensionality in fuel characterization, which is necessary to reduce uncertainty and increase precision of inputs to fire behavior, fuel consumption and smoke models (Chaps. 3 and 4). Advances in remote sensing techniques offer promising approaches to 3D fuel characterization for fine-scale inputs of CFD models of fire behavior to landscape fire spread, fuel consumption, and smoke models. These methods are currently under development (Rowell et al. 2020), employing a hierarchical sampling method from fine-scale characterization to coarse-scale mapping applications (Fig. 2.8).

Conceptual diagram of multi-scaled estimates of 3D fuels characterized using a hierarchical sampling method from individual fuel particles or objects to patch and landscape extents and corresponding sampling resolutions (grain size)
Broad-scale mapping and modeling applications present an additional challenge to quantifying fuel characteristics and represent them hierarchically across spatial scales. Field and remote sensing measurements may be taken at similar scales, but they are inherently difficult to integrate due to the complexity of fuels and challenges in co-locating and coordinating field and remote sensing measurements. For example, a new approach to 3D field sampling (Hawley et al. 2018) was designed specifically to link 3D fuel types and fuel mass, collected within 1000-cm3 cubes to the same resolution of volume TLS point clouds of vegetation structure, with 1 cm3 precision (Fig. 2.9). In 3D imagery, volumetric pixels are termed voxels, and the 1000-cm3 cubes are also referred to as voxels within the field sampling frame.

(Photo by Susan Prichard)
Voxel sampling frame, vertical view showing the 10 × 10 × 10 cm sample voxel grid of a mixed shrub, herb, grass, ad litter fuelbed
Calibrated with voxel field datasets, TLS is a novel and scalable advancement in fuel characterization with highly resolved bulk density estimates for known volumes (Rowell et al. 2020). Robust coupling involves co-locating techniques between individual 3D field plots and TLS point clouds. However, this approach has limitations. First, voxel sampling provides explicit representation of fuel types and fuel mass, but the 1000 cm3 space of each voxel is assumed fully occupied due to lack of measurements at finer spatial scales. Second, the TLS is limited by occlusion near to the ground where most fine and consumable fuels occur. Additional work is needed to create machine-learning algorithms to classify 3D point cloud datasets generated from TLS and/or photogrammetry into objects and apply rule-based assignments of metrics such as bulk density, surface-area-to-volume ratios, and fuel moisture content to each classified object or volume.
2.4.1 Scaling from Fine-Scale to Coarse-Scale Fuel Characterization
The structure and condition of fuels influence their availability to burn and how much exogenous work must be applied to release their energy. For example, coarse-scale grid cells (e.g., 5 × 5 × 5 m) may be sufficient to represent crown fuels during extreme fire spread events, where fire weather and topography dominate fire behavior and smoke production patterns. In contrast, fine-scale fuel heterogeneity measurements are often critical for accurate fire behavior predictions in a low-intensity surface fire such as a prescribed burn. A forest that has been recently thinned and burned contains combustible fuels but in a structure that is less available to burn in a subsequent fire. However, column-driven fire spread combined with strong winds could exceed the burning threshold for that site. Similarly, sites with high live fuel moisture in grass and shrub fuels may present barriers to fire spread under normal fire weather conditions, but burning thresholds can be exceeded by exceptional fire weather.
At present, no established method exists to scale 3D fuels data from fine-scale field measurements to the larger spatial scales (e.g., burn units or watersheds) useful for decision making. Before such mapping applications can be developed, modelers need to identify how fuel metrics (e.g., loading, bulk density, heat content) and characteristics (e.g., fuel type and live/dead) can be assigned from sampled values to large spatial scales and across fire types (e.g., prescribed fire, wildfire, surface fire versus canopy fire).
Fire atmosphere interactions that contribute to fire behavior, plume dynamics, and smoke production are beginning to be resolved in models such as WRF-SFIRE (Mandel et al. 2011), FIRETEC (Linn et al. 2002), and Wildland-Urban-Interface Fire Dynamics Simulator (WFDS; Mell et al. 2007). However, evaluation datasets are needed to determine how the scale and precision of fuel inputs influence model predictions of fire behavior, heat release, and smoke production.
Large-scale studies such as the Fire and Smoke Model Evaluation Experiment (FASMEE; Prichard et al. 2019b) and the FIREX-AQ Western wildfires campaign (Werneke et al. 2018) include synchronized and coordinated measurements of source characterization, fire behavior, plume dynamics, and smoke production. Investments in these coordinated measurement campaigns are necessary to improve our understanding of fire atmosphere interactions and inform future model evaluation and development (Liu et al. 2019, Chap. 4).
2.4.2 Challenges in Forest Floor Characterization
Organic soil layers, including litter and ground fuels, can be a substantial portion of total fuel loading and contribute disproportionately to smoke emissions including long-term smoldering events. However, methods for characterizing peatland and forest floor layers have not advanced much in recent decades. Remote sensing techniques, such as TLS, can be used for litter characterization but are unable to penetrate organic soils and cannot resolve their density or depth. Models of organic soil accumulation, decomposition, and changing moisture characteristics are needed to complement 3D fuel measurement techniques.
No models exist that provide accurate representations of ground fuel consumption as it relates to forest structure, climate, weather, leaf chemistry, and time since last fire, all of which are dynamic through space and time. For example, depending on fire intensity and soil moisture, wildland fires rarely consume entire organic soil layers. Variability in ground fuel consumption and smoldering patterns adds further complexity to smoke production. Recent research on spatial distributions of ground fuel depth, biomass, and other characteristics in long-unburned forests of the southeastern USA emphasizes fine-scale spatial and temporal variability in ground fuels and the potential challenges of sampling across forest stands or burn units (Kreye et al. 2014). In boreal ecosystems, where the majority of biomass is stored in peatland soils, Chasmer et al. (2017) showed that variations in forest floor depth could be quantified by comparing ground surface elevation models derived from separate pre- and post-fire Lidar collections. However, in most fuelbeds, ground fuel layers are too shallow relative to the vertical precision of airborne Lidar to detect changes in depth as a result of consumption.
2.4.3 Modeling Spatial and Temporal Dynamics of Wildland Fuels
The biggest gap in our knowledge of wildland fuels is creating up-to-date and accurate models of fuel dynamics to inform smoke modeling. This challenge has been termed the “ecology of fuels” (Mitchell et al. 2009), requiring an understanding of the entire life cycle of wildland fuels, including vegetative reproduction, growth, senescence, deposition of fine and coarse debris, decay, mortality and connections to weather, climate, soils, and nutrient cycling (Agee and Huff 1987; Harmon et al. 2000). The 3D spatial complexity of fuels and their dynamics over time, translate to similar complexity and variability in the availability of fuels to burn and their contribution to fire behavior and effects. However, the life cycle of fuels as it relates to vegetation dynamics and feedbacks with fire has not been fully defined. Furthermore, the temporal dynamics of fuels can be distinct between fine-scale changes in fine-fuel moisture and coarse-scale changes (e.g., vegetation structure, productivity and climate).
Limited understanding of live and dead fuel moisture dynamics also constrains our ability to model fire behavior, fuel consumption, and smoke production. Fuel moisture varies across ecosystems, seasons, and fuel components, and moisture dynamics often exhibit large sub-daily changes on local scales (Viney 1991; Banwell et al. 2013; Kreye et al. 2018). Fuel moisture often dictates the availability of fuels for ignition and consumption, with pronounced differences across arid, semi-arid, and humid climates. Summer climate in western North America is generally characterized by a long period of drying, making coarse wood and organic soils generally available to burn during the peak of wildfire season (Estes et al. 2012). In contrast, the southeastern USA has a humid, subtropical climate; downed wood decays quickly, and where coarse wood exists it can act as a fuel break during low-intensity fire spread. Live and dead fine-fuel dynamics determine if fuels are available to burn, either promoting or inhibiting fire spread. For example, across ecosystems with grass-dominated fuelbeds, spring green-up is generally considered a barrier to fire spread. Differences in fuel moisture and the corresponding availability of fuels to burn over hours to months are well known among practitioners, but these fundamentals are not explicitly represented in predictive fire behavior, fuel consumption, and smoke models.
2.5 Vision for Improving Fuel Science in Support of Smoke Science
Fuel characterization and mapping to support smoke science will need to rely on a range of methods. Because some fuels, including forest floor and peatland soils, cannot be remotely sensed, future approaches to fuel characterization will involve a combination of traditional methods and new technologies. Rather than describing fuel characteristics as modeled estimates across raster maps, the ranges and variations of fuel distributions will be required, particularly for CFD models that rely on gridded, 3D inputs of fuels, terrain, and atmospheric turbulence. Fuel inventory and modeling methods also need to be developed to capture the nested spatial variability of wildland fuels and dynamics of wildland fuelbeds over time (Keane 2015).
As more work is devoted to 3D fuel characterization for CFD models, we envision a library of 3D fuels, mapping tools, and parameters for customization of fuelbeds for specific applications and fine- to coarse-scale mapping of pre- and post-burn canopy and surface fuels (Fig. 2.10). To date, CFD models such as FIRETEC and WFDS are used only for research due to their complex input and computational requirements. However, progress is being made to advance real-time models of fire spread and smoke production that can be used operationally for prescribed burn planning and wildfire monitoring (e.g., QUIC-Fire; Linn et al. 2020).

Remotely sensed datasets can be used to characterize and quantify patterns of bulk density, consumption and fire effects. For example, Plots a and b represent pre-fire and post-fire short-range, photogrammetry-based 3D point clouds for an individual plot that can be calibrated with field data to estimate fuel consumption. Estimated consumption can then be scaled to prescribed burn units using synoptic pre- and post-burn TLS imagery (c) where bright yellow on the ground is burned and blue hues are unburned
For CFD models to move into operational use, applications will be needed to translate 3D fuel characteristics into model inputs at appropriate scales for smoke management applications (e.g., prescribed burn planning, wildfire smoke modeling). CFD modeling requirements mean that next-generation fuel mapping will need synthetic, gridded fuelbeds from remotely sensed data, machine-learning algorithms to identify objects within 3D point clouds, and assigned fuel properties for each identified object or fuel complex (based on statistical models and known probability distributions) (Fig. 2.11). User-friendly technology and analytical tools will be required to guide smoke managers in novel but practical approaches to improve 3D fuel characterization and mapping.

[From Rowell et al. (2016)]
Synthetic 3D broadleaf and long-needled pine litter fuelbeds developed from object-based scanning and statistical models of leaf litter composition and depth
Better characterization of sources of smoldering consumption can also improve estimates of the severity and duration of smoke impacts to communities, especially from prescribed burning (Hyde et al. 2011). Advances with SfM from both UAS platforms and short-range photogrammetry offer access to fine grain data that can be used to map fuels that contribute most to smoldering combustion and long-duration smoke production (Wallace et al. 2012; Cooper et al. 2017). SfM photogrammetry can complement ALS imagery by providing true color or multispectral images that allow for delineation of live and dead fuels and fuel classification refinement (Fig. 2.10). For example, integration of SfM imagery can assist in object-based classification of large coarse woody debris, and these objects can then be attributed with mass estimates to improve modeling of flaming and smoldering emissions (Fig. 2.4).
TLS-based estimates can be used to refine coarser-scale estimates of surface and canopy fuels (García et al. 2011; Seielstad et al. 2011; Rowell et al. 2016, 2017). Fuel libraries from TLS tied empirically or probabilistically to large-scale ALS or passive remote sensing datasets will be a significant step toward broad-scale 3D mapping applications. A limitation of ALS and TLS has been cost, efficiency, and time since acquisition. There are a growing number of ALS datasets nationally, but these snapshots in time do not encompass disturbances that could alter fuel loading and distribution or expected fire behavior. Forest growth models, such as the Forest Vegetation Simulator, can use ALS data and their derivatives to calculate estimates of growth and biomass accumulation in forest canopies.
Maintaining reliable, up-to-date maps of wildland fuels will require linkages between remotely sensed datasets and ecological process models. High deposition of vegetation, coupled with severe disturbance effects, may alter fuelbed characteristics and render fuel maps outdated (Keane et al. 2001). It may be especially important to capture fuel dynamics in frequently burned or actively managed ecosystems. Ecosystem models typically fall short in simulating realistic fuel characteristics needed by existing fire models (Thornton et al. 2002). Ecological models that simulate development, deposition, decomposition, and disturbance (Sect. 2.2) can capture multi-scale fuel dynamics and translate them to fire behavior and smoke modeling at relevant spatial scales (Hatten and Zabowski 2009; Dunn and Bailey 2015). Linking fuel characteristics with ecological processes can inform fire behavior and smoke dynamics. Improved representation of fuel dynamics within ecological models will also refine how they simulate wildfires, insects, disease, fuel treatment and ecological restoration activities, and climate change.
2.6 Science Delivery to Managers
Over the past two decades, several fire effects and smoke models have been used by managers to characterize fuels and inform fire and smoke management decisions. Table 2.2 presents examples of models used to predict smoke production and, in some cases, dispersion. To appropriately apply their products to smoke management decisions or ensemble predictions, it is important to understand the error, bias, assumptions and limitations of the models. The BlueSky Smoke Modeling Framework (Larkin et al. 2010) is an operational smoke prediction tool that uses ensemble modeling to estimate available fuel, consumption, emissions, and smoke dispersion. BlueSky estimates fuel loadings from a 1-km fuelbed map of the USA or user inputs and models fuel consumption with CONSUME as a first step to smoke production and dispersion modeling (Larkin et al. 2010).
The Interagency Fuel Treatment Decision Support System (IFTDSS, https://iftdss.firenet.gov) was designed to provide a Web-based system to assist managers in fire, fuel, and smoke planning; reduce the number of tools for which access is needed; and reduce error propagation caused by using multiple, ensemble models. IFTDSS is working to incorporate CONSUME and FOFEM modules that use mapped fuel loadings values from LANDFIRE (Rollins 2009) or user inputs. CONSUME and FOFEM rely on a combination of empirical, semi-empirical, and physical process-based models of consumption. Command-line versions of calculators for both models are available for smoke modeling applications.
Every approach to modeling smoke emissions has limitations. Point-based models such as CONSUME and FOFEM use many empirical equations for estimating fuel consumption and smoke emissions. However, most equations were developed with data collected from a limited number of ecosystems and fuelbeds, and under a limited range of fire and fuel conditions. The physics-based process model in FOFEM simplifies many complex processes and was calibrated using relatively few lab and field burns (Albini et al. 1995; Albini and Reinhardt 1995). Although point models provide smoke estimates based on published research and expert opinion, model precision is limited by the high variability inherent in the production of smoke (Larkin et al. 2012). For example, Prichard et al. (2014) used CONSUME and FOFEM to compare predicted and actual fuel consumption in the southeastern USA, finding that predicted fuel consumption had high uncertainty in some cases, particularly with high pre-burn fuel loading.
For smoke model applications to be useful for managers, models must be updated to include recent research. A formal process is needed to provide periodic version updates to ensure that smoke modeling applications include the “best available science” for estimating smoke emissions. This is of particular concern as existing point models are integrated or merged into spatial modeling frameworks.
There are relatively few training options for the wide variety of available smoke models and products. The Introduction to Fire Effects (RX-310) and Smoke Management Techniques (RX-410) classes developed by the National Wildfire Coordinating Group provide limited training using CONSUME and FOFEM and an introduction to BlueSky. The annual Air Resource Advisor training class (administered by the US Forest Service) focuses on large-scale (wildfire) smoke impacts and primarily uses BlueSky for simulations. Students in this class are members of fire Incident Management Teams and use air quality modeling to assess smoke risks to fire personnel and local communities. The limited options for smoke model training can lead to misinterpretation of model results or overreliance on model estimates without understanding underlying limitations and assumptions.
2.7 Research Needs
For fuel and consumption research related to smoke management, scientific challenges can be summarized in six categories as follows:
-
Consistent methodologies to address sampling of wildland fuels—Although field sampling is needed to represent a fuelbed from ground to canopy, the required sampling methods do not easily overlap (e.g., planar intersect for downed wood, depths and bulk density for litter, ground fuels), and most traditional fuel sampling methods have low repeatability and high uncertainty. Because fuel categories are not necessarily well correlated, predicting one component based on available sampling of another is unrealistic. Hierarchical sampling methods that employ a range of remotely sensed and field-based datasets (Fig. 2.5) are needed to integrate fuels data and support characterization at the scale of prescribed burn units and wildland fire events.
-
Better understanding of the role of sampling scale in error propagation in fuel characterization and mapping—The appropriate sampling area and intensity may differ by fuel component (e.g., bulk density and biomass of litter and ground fuels). Scale considerations are important for coordinated sampling design and to inform applications that apply fine-scale fuel characterization to coarser-scale mapping applications. CFD models can be integrated with smoke simulations to evaluate sensitivity of smoke prediction to fuelbed heterogeneity and spatial scales of fuel inputs. More work is needed to evaluate the sensitivity of current CFD models (e.g., FIRETEC, WFDS) to spatial scales of fuel characterization across different vegetation types.
-
Improved methods for characterizing fuels that are major sources of smoke, including coarse wood, peatland soils, and other ground fuels—Although TLS and SfM offer promising advances in characterizing wildland fuels, these techniques cannot quantify deep organic soil layers. Intensive field sampling is needed to characterize variability in peatland soils and other ground fuels and to contribute to predictive models of ground fuels, potentially paired with innovations in remote sensing techniques or soil mapping. In contrast, TLS and photogrammetry may aid in more accurate surveys and characterization of coarse wood. However, more work is needed to understand and characterize fuel moisture, decay class, and contribution of coarse wood to fuel consumption and emissions.
-
Improvements to 3D fuel characterization using ALS, TLS, and SfM photogrammetry—Remote sensing techniques, including integrated ALS, TLS, and SfM datasets, have advanced fuel characterization, but research is needed to inform image interpretation and quantification of wildland fuel loadings and structure. Some of the remaining challenges with these methods include:
-
Resolutions of available remotely sensed imagery may not match (e.g., Landsat TM vs. Lidar vs. photogrammetry) and may not fit the spatial scale or match the temporal dynamics of the component of interest (i.e., downed wood vs. stand structure).
-
Wildland fuels are inherently variable in 3D space, and correlations are often weak between canopy fuels and surface or ground fuels, which are obscured by forest canopies.
-
Fuel moisture dynamics are critical for fire behavior and smoke production but are difficult to measure with remote sensing.
-
-
Use of 3D fuels mapping for improved estimates of fuel consumption—As methods to map fuels in 3D become more widely available, improved maps of fuel consumption based on pre- and post-burn imagery will be possible. Field validation will be required to inform fuel consumption mapping that can improve emission estimates for flaming front fires and post-flaming front smoldering combustion.
-
Improved models of fuel dynamics—More research is needed on modeling vegetation and fuel dynamics over time and space, with emphasis on climate change effects on vegetation and consequences for fuel properties. Live fuel moisture is particularly dynamic and a critical aspect of fire behavior and effects (e.g., Jolly et al. 2014). Spatiotemporal dynamics of fuels has implications for fire, climate, and carbon modeling at local to regional scales. Research is needed to refine existing ecological process models and potentially develop new ones to project vegetation and fuel dynamics, tailoring projections to next-generation fire behavior and smoke models.
2.8 Conclusions
Fuels are foundational to smoke prediction, often being the largest source of potential uncertainty and error in the chain of biophysical components involved in combustion and smoke production from ground to atmosphere. Until recently, fuels and fuel consumption have been studied using traditional methods to estimate the cover, height, and biomass of wildland fuels across dominant ecosystems of North America, providing a good knowledge base in both the scientific and management communities. Over the past decade, significant progress has been made in describing and quantifying fuels more accurately; new technologies have improved 3D characterization and quantification across large spatial scales.
Despite this progress, improved smoke modeling will require coordinated advances in fuel characterization, consumption by combustion phase and fire atmosphere interactions associated with fire behavior, and plume dynamics modeling. One of the biggest challenges in characterizing fuels is the high spatial and temporal variability that is present in wildland fuels in nearly all types of ecosystems. Quantifying fuel loadings across large landscapes continues to be a major issue, for both technical and practical reasons. In addition, up-to-date fuel inventories are relatively rare, with measurement scale and mapping applications often being a barrier for agencies that manage vegetation and fuels.
Although most fire and fuel managers are generally well informed about traditional methods for characterizing fuels, greater emphasis is often placed on fire behavior than smoke production. Potential smoke impacts on human health and other activities (Chap. 7) provide an important context for smoke science and for applications of scientific tools and concepts in managing both prescribed fire and wildfire (Engel 2013; Ryan et al. 2013; Long et al. 2018). Improved linkages, both technically and logistically, are needed to inform estimates of smoke production that may exceed National Ambient Air Quality Standards, as well as phenomena such as long-term smoldering events and nighttime inversions. Although some targeted work has been conducted on coarse wood and ground fuel consumption (Brown et al. 1985; Varner et al. 2007; Prichard et al. 2017), the sample size and range of fire weather and fuel moisture conditions are currently inadequate to improve existing fuel consumption models.
Most fuels managers do not have routine access to high-tech tools or high-resolution data to estimate smoke production (e.g., 3D characterization of fuels). Therefore, practical approaches are needed to improve field-based fuel characterization, fire behavior modeling, and consumption modeling, which will in turn elucidate the potential contribution of specific fuels (coarse wood, rotten stumps, basal accumulations, and deep organic soil layers) to fire emissions and smoke. Given the spatial and temporal complexity of wildland fuel dynamics, a better understanding is needed on the ecology of vegetation and fuels—concurrently, not as separate topics. In future decades, we anticipate that climate change will drive substantial changes in vegetation and fire dynamics, with concomitant changes in fuelbeds and their contribution to fuel consumption and emissions. Developing or revising ecological process models to ensure compatibility with next-generation fire behavior and smoke models will improve characterization of wildland fuel dynamics as well as smoke predictions.
Notes
- 1.
Ground fuels are defined as partially or fully decomposed soil organic matter. Organic soil horizons often consist of three vertical layers: the newly fallen leaf litter (Oi), partially decomposed material (Oe), and highly decomposed material (Oa). In the context of fuels, the Oi remains distinct from the Oe and the Oa, which are often combined into what is commonly called “duff” or ground fuels by fire and fuel managers. For this chapter, the Oi is referred to as leaf litter or litter, while the Oa and Oe horizons are combined and referred to as ground fuels.
References
Agee JK, Huff MH (1987) Fuel succession in a western hemlock/Douglas-fir forest. Can J for Res 17:697–704
Ahmadov R, James E, Grell G et al (2019) Forecasting smoke, visibility and smoke-weather interactions using a coupled meteorology-chemistry modeling system: rapid refresh and high-resolution rapid refresh coupled with smoke (RAP/HRRR-Smoke). Geophysical Research Abstracts, EGU2019, 2118605A
Albini FA, Reinhardt ED (1995) Modeling ignition and burning rate of large woody natural fuels. Int J Wildland Fire 5:81–91
Albini FA, Brown JA, Reinhardt ED, Ottmar RD (1995) Calibration of a large fuel burnout model. Int J Wildland Fire 5:173–192
Albini FA (1976) Estimating wildfire behavior and effects (General Technical Report INT-GTR-30). Ogden: U.S. Forest Service, Intermountain Forest and Range Research Station
Anderson HE (1976) Fuels - the source of the matter. Air quality and smoke from urban and forest fires. The National Academies Press, Washington, DC, pp 318–321
Banwell FM, Varner JM, Knapp EE, Van Kirk RW (2013) Spatial, seasonal, and diel forest floor moisture dynamics in Jeffery pine-white fir forests of the Lake Tahoe Basin, USA. For Ecol Manage 305:11–20
Boschetti L and Roy DP (2009) Strategies for the fusion of satellite fire radiative power with burned area data for fire radiative energy derivation. J Geophys Res 114:D20302
Bright BC, Loudermilk EL, Pokswinski SM et al (2016) Introducing close-range photogrammetry for characterizing forest understory plant diversity and surface fuel structure at fine scales. Can J Remote Sens 42:460–472
Brönnimann S, Volken E, Lehmann K, Wooster M (2009) Biomass burning aerosols and climate–a 19th century perspective. Meteorol Z 18:349–353
Brown JK (1971) A planar intersect method for sampling fuel volume and surface area. Forest Sci 17:96–102
Brown JK, Marsden MA, Ryan KC, Reinhardt ED (1985) Predicting duff and woody fuel consumed by prescribed fire in the Northern Rocky Mountains (General Technical Report INT-GTR-337). Ogden: U.S. Forest Service, Intermountain Forest Experiment Station
Brown JK (1974) Handbook for inventorying downed woody material (General Technical Report INT-GTR-16). Ogden: U.S. Forest Service, Intermountain Forest Experiment Station
Byram GM (1959) Combustion of forest fuels. In: Brown KP (ed) Forest fire: control and use. McGraw-Hill, New York
Catchpole WR, Wheeler CJ (1992) Estimating plant biomass: a review of techniques. Aust J Ecol 17:121–131
Chasmer LE, Hopkinson CD, Petrone RM, Sitar M (2017) Using multitemporal and multispectral airborne Lidar to assess depth of peat loss and correspondence with a new active normalized burn ratio for wildfires. Geophys Res Lett 44:11851–11859
Clinton N, Scarborough J, Tian Y, Gong P (2003) A GIS based emissions estimation system for wildfire and prescribed burning. In: Proceedings of the EPA 12th annual emission inventory conference. San Diego, CA. Available at: https://www3.epa.gov/ttn/chief/conference/ei12/part/clinton.pdf. 10 July 2020
Cook GD, Meyer CP, Muepu M, Liedloff AC (2016) Dead organic matter and the dynamics of carbon and greenhouse gas emissions in frequently burnt savannas. Int J Wildland Fire 25:1252–1263
Cooper SD, Roy DP, Schaaf CB, Paynter I (2017) Examination of the potential of terrestrial laser scanning and structure-from-motion photogrammetry for rapid nondestructive field measurement of grass biomass. Remote Sens 9:531
de Groot WJ, Landry R, Kurz WA et al (2007) Estimating direct carbon emissions from Canadian wildland fires. Int J Wildland Fire 16:593–606
DeBano LF, Neary DG, Ffolliott PF (1998) Fire’s effect on ecosystems. Wiley, New York
Dozier J (1981) A method for satellite identification of surface temperature fields of subpixel resolution. Remote Sens Environ 11:221–229
Dubayah RO, Sheldon SL, Clark DB et al (2010) Estimation of tropical forest height and biomass dynamics using lidar remote sensing at La Selva, Costa Rica. J Geophys Res Biogeosci 115:G2
Dunn CJ, Bailey JD (2015) Modeling the direct effects of salvage logging on long-term temporal fuel dynamics in dry-mixed conifer forests. For Ecol Manage 341:93–109
Engel KH (2013) Perverse incentives: the case of wildfire smoke regulation. Ecol Law Quart 40:623–672
Estes BL, Knapp EE, Skinner CN, Uzoh FCC (2012) Seasonal variation in surface fuel moisture between unthinned and thinned mixed conifer forests, northern California, USA. Int J Wildland Fire 21:428–435
Ferguson SA, Hardy CC (1994) Modeling smoldering emissions from prescribed broadcast burns in the Pacific-Northwest. Int J Wildland Fire 4:135–142
Fosberg MA, Lancaster JW, Schroeder MJ (1970) Fuel moisture response-drying relationships under standard and field conditions. Forest Sci 16:121–128
Freeborn PH, Wooster MJ, Hao WM et al (2008) Relationships between energy release, fuel mass loss, and trace gas and aerosol emissions during laboratory biomass fires. J Geophys Res: Atmosp 113:D01301
García M, Danson FM, Riano D et al (2011) Terrestrial laser scanning to estimate plot-level forest canopy fuel properties. Int J Appl Earth Obs Geoinf 13:636–645
Gill AM, Allan G (2008) Large fires, fire effects and the fire-regime concept. Int J Wildland Fire 17:688–695
Gitelson AA, Merzlyak MN (1997) Remote estimation of chlorophyll content in higher plant leaves. Int J Remote Sens 18:2691–2697
Goel NS, Qin W (1994) Influences of canopy architecture on relationships between various vegetation indices and LAI and FPAR: A computer simulation. Remote Sens Rev 10:309–347
Grell GA, Peckham SE, Schmitz R et al (2005) Fully coupled “online” chemistry within the WRF model. Atmos Environ 39:6957–6975
Haboudane D, Miller JR, Pattey E et al (2004) Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: modeling and validation in the context of precision agriculture. Remote Sens Environ 90:337–352
Hardy C (1996) Guidelines for estimating volume, biomass, and smoke production for piled slash (General Technical Report PNW-GTR-364). U.S. Forest Service, Pacific Northwest Research Station, Portland
Harmon ME, Krankina ON, Sexton J (2000) Decomposition vectors: a new approach to estimating woody detritus decomposition dynamics. Can J for Res 30:76–84
Hatten JA, Zabowski D (2009) Changes in soil organic matter pools and carbon mineralization as influenced by fire severity. Soil Sci Soc Am J 73:262–273
Hawley CM, Loudermilk EL, Rowell EM, Pokswinski S (2018) A novel approach to fuel biomass sampling for 3D fuel characterization. MethodsX 5:1597–1604
Hoff V, Rowell E, Teske C, Queen L, Wallace T (2019) Assessing the relationship between forest structure and fire severity on the North Rim of the Grand Canyon. Fire 2:10
Hudak AT, Morgan P, Bobbitt MJ et al (2007) The relationship of multispectral satellite imagery to immediate fire effects. Fire Ecol 3:64–74
Hudak AT, Crookston NL, Evans JS et al (2008) Nearest neighbor imputation of species-level, plot-scale forest structure attributes from LiDAR data. Remote Sens Environ 112:2232–2245
Hudak AT, Dickinson MB, Bright BC et al (2016a) Measurements relating fire radiative energy density and surface fuel consumption–RxCADRE 2011 and 2012. Int J Wildland Fire 25:25–37
Hudak AT, Bright BC, Pokswindki S et al (2016b) Mapping forest structure and composition from low-density LiDAR for informed forest, fuel, and fire management at Eglin Air Force Base, Florida, USA. Can J Remote Sens 42:411–427
Hudak AT, Kato A, Bright BC et al (2020) Towards spatially explicit quantification of pre-and postfire fuels and fuel consumption from traditional and point cloud measurements. Forest Sci 66:428–442
Hyde P, Nelson R, Kimes D, Levine E (2007) Exploring LiDAR–RaDAR synergy—predicting aboveground biomass in a southwestern ponderosa pine forest using LiDAR, SAR and InSAR. Remote Sens Environ 106:28–38
Hyde JC, Smith AMS, Ottmar RD et al (2011) The combustion of sound and rotten coarse woody debris: a review. Int J Wildland Fire 20:163–174
Johnson EA, Miyanishi K (eds) (2001) Forest fires: behavior and ecological effects. Elsevier, Amsterdam
Jolly WM, Hadlow AM, Huguet K (2014) De-coupling seasonal changes in water content and dry matter to predict live conifer foliar moisture content. Int J Wildland Fire 23:480–489
Kaufman YJ, Tucker CJ, Fung IY (1989) Remote sensing of biomass burning in the tropics. Adv Space Res 9:265–268
Keane RE (2008) Biophysical controls on surface fuel litterfall and decomposition in the northern Rocky Mountains, USA. Can J for Res 38:1431–1445
Keane RE (2013) Describing wildland surface fuel loading for fire management: a review of approaches, methods and systems. Int J Wildland Fire 22:51–62
Keane RE (2015) Wildland fuel fundamentals and applications. Springer, New York
Keane RE, Gray K (2013) Comparing three sampling techniques for estimating fine woody down dead biomass. Int J Wildland Fire 22:1093–1107
Keane RE, Burgan RE, van Wagtendonk JV (2001) Mapping wildland fuels for fire management across multiple scales: integrating remote sensing, GIS, and biophysical modeling. Int J Wildland Fire 10:301–319
Keane R, Gray K, Bacciu V, Leirfallom S (2012) Spatial scaling of wildland fuels for six forest and rangeland ecosystems of the northern Rocky Mountains, USA. Landscape Ecol 27:1213–1234
Keane RE, Herynk JM, Toney C et al (2013) Evaluating the performance and mapping of three fuel classification systems using forest inventory and analysis surface fuel measurements. For Ecol Manage 305:248–263
Keane RE, Dickinson LJ (2007) The Photoload sampling technique: estimating surface fuel loadings using downward looking photographs (General Technical Report RMRS-GTR-190). Fort Collins: U.S. Forest Service, Rocky Mountain Research Station
Keane RE, Garner JL, Schmidt KM et al (1998) Development of input spatial data layers for the FARSITE fire growth model for the Selway-Bitterroot Wilderness complex, USA (General Technical Report RMRS-GTR-3). Ogden: U.S. Forest Service, Rocky Mountain Research Station
Keane RE, Frescino TL, Reeves MC, Long J (2006) Mapping wildland fuels across large regions for the LANDFIRE prototype project. In: Rollins MG, Frame C (eds) The LANDFIRE prototype project: nationally consistent and locally relevant geospatial data for wildland fire management, 2006 (General Technical Report RMRS-GTR 175, pp. 367–396). Fort Collins: U.S. Forest Service, Rocky Mountain Research Station
Keane RE (2019) Natural fuels. In Manzello SL (ed) Encyclopedia of wildfires and Wildland-Urban Interface (WUI) fires. Springer International Publishing, Cham
Kilzer FJ, Broido A (1965) Speculations on the nature of cellulose pyrolysis. Pyrodynamics 2:151–163
King KJ, Bradstock RA, Cary GJ et al (2008) The relative importance of fine-scale fuel mosaics on reducing fire risk in south-west Tasmania, Australia. Int J Wildland Fire 17:421–430
Klauberg C, Hudak A, Bright B et al (2018) Use of ordinary kriging and Gaussian conditional simulation to interpolate airborne fire radiative energy density estimates. Int J Wildland Fire 27:228–240
Kreye JK, Varner JM, Dugaw CJ (2014) Spatial and temporal variability of forest floor duff characteristics in long-unburned Pinus palustris forests. Can J for Res 44:1477–1486
Kreye JK, Hiers JK, Varner JM et al (2018) Effects of solar heating on the moisture dynamics of forest floor litter in humid environments: composition, structure, and position matter. Can J for Res 48:1331–1342
Larkin NK, O’Neill SM, Solomon R et al (2010) The BlueSky smoke modeling framework. Int J Wildland Fire 18:906–920
Larkin NK, Strand TM, Drury SA et al (2012) Phase I of the smoke and emissions model intercomparison project (SEMIP): creation of SEMIP and evaluation of current models (Final report 42). Joint Fire Science Program, Boise
Lavdas LG (1996) Improving control of smoke from prescribed fire using low visibility occurrence risk index. South J Appl for 20:10–14
Lefsky MA, Cohen W, Acker S et al (1999) Lidar remote sensing of the canopy structure and biophysical properties of Douglas-fir western hemlock forests. Remote Sens Environ 70:339–361
Lefsky MA, Cohen WB, Parker GG, Harding DJ (2002) Lidar remote sensing for ecosystem studies. Bioscience 52:19–30
Lefsky M, Cohen W, Spies T (2001) An evaluation of alternate remote sensing products for forest inventory, monitoring, and mapping of Douglas-fir forests in western Oregon. Canadian J Forest Res 31:78–87
Lentile LB, Holden AZ, Smith AMS et al (2006) Remote sensing techniques to assess active fire characteristics and post-fire effects. Int J Wildland Fire 15:319–345
Linn R, Reisner J, Colman JJ, Winterkamp J (2002) Studying wildfire behavior using FIRETEC. Int J Wildland Fire 11:233–246
Linn RR, Goodrick S, Brambilla S et al (2020) QUIC-fire: A fast-running simulation tool for prescribed fire planning. Environ Model Software 125;104616
Liu Y, Kochanski A, Baker KR et al (2019) Fire behaviour and smoke modelling: model improvement and measurement needs for next-generation smoke research and forecasting systems. Int J Wildland Fire 28:570–588
Long JW, Tarnay LW, North MP (2018) Aligning smoke management with ecological and public health goals. J Forest 116:76–86
Loudermilk EL, Hiers JK, O’Brien JJ et al (2009) Ground-based LIDAR: a novel approach to quantify fine-scale fuelbed characteristics. Int J Wildland Fire 18:676–685
Mandel J, Beezley JD, Kochanski AK (2011) Coupled atmosphere-wildland fire modeling with WRF-fire. Geosci Model Development 4:591–610
Mathews BJ, Strand EK, Smith AM et al (2016) Laboratory experiments to estimate intersection of infrared radiation by tree canopies. Int J Wildland Fire 25:1009–1014
Mell W, Jenkins MA, Gould J, Cheney P (2007) A physics-based approach to modelling grassland fires. Int J Wildland Fire 16:1–22
Menakis JP, Keane RE, Long DG (2000) Mapping ecological attributes using an integrated vegetation classification system approach. J Sustain for 11:245–265
Mitchell RJ, Hiers JK, O’Brien J, Starr G (2009) Ecological forestry in the Southeast: Understanding the ecology of fuels. J Forest 107:391–397
Moran CJ, Seielstad CA, Cunningham MR et al (2019) Deriving fire behavior metrics from UAS imagery. Fire 2:36
Mueller-Dombois D, Ellenberg H (1974) Aims and methods of vegetation ecology. Wiley, New York
Ohlemiller TJ (1986) Smoldering combustion (NBSIR 85-3294). U.S. Department of Commerce National Bureau of Standards, Gaithersburg
Omi PN (2015) Theory and practice of wildland fuels management. Current Forestry Reports 1:100–117
Ottmar RD (2014) Wildland fire emissions, carbon, and climate: modeling fuel consumption. For Ecol Manage 317:41–50
Ottmar RD, Sandberg DV, Riccardi CL, Prichard SJ (2007) An overview of the fuel characteristic classification system – quantifying, classifying, and creating fuelbeds for resource planning. Can J for Res 37:2383–2393
Parsons RA, Mell WE, McCauley P (2010) Linking 3D spatial models of fuels and fire: effects of spatial heterogeneity on fire behavior. Ecol Model 222:679–691
Parsons RA, Linn RR, Pimont F et al (2017) Numerical investigation of aggregated fuel spatial pattern impacts on fire behavior. Land 6:43
Peterson JL (1987) Analysis and reduction of the errors of predicting prescribed burn emissions. Master’s thesis. University of Washington, Seattle
Peterson J, Lahm P, Fitch M et al (eds) (2018) NWCG Smoke management guide for prescribed fire (PMS 420-2, NFES 1279). National Wildfire Coordinating Group, Boise
Prichard S, Ottmar R, Anderson G (2007) CONSUME user’s guide and scientific documentation. U.S. Forest Service, Pacific Northwest Research Station, Seattle. https://www.fs.fed.us/pnw/fera/research/smoke/consume/consume30_users_guide.pdf. 10 July 2020
Prichard SJ, Karau EC, Ottmar RD et al (2014) Evaluation of the CONSUME and FOFEM fuel consumption models in pine and mixed hardwood forests of the eastern United States. Can J for Res 44:784–795
Prichard S, Kennedy M, Wright C et al (2017) Predicting forest floor and woody fuel consumption from prescribed burns in southern and western pine ecosystems of the United States. For Ecol Manage 405:328–338
Prichard S, Larkin NS, Ottmar R et al (2019a) The fire and smoke model evaluation experiment—a plan for integrated, large fire-atmosphere field campaigns. Atmosphere 10:66
Prichard SJ, Kennedy MC, Andreu AG et al (2019b) Next-generation biomass mapping for regional emissions and carbon inventories: incorporating uncertainty in wildland fuel characterization. J Geophys Res Biogeosci 124:3699–3716
Rappold AG, Stone SL, Cascio WE et al (2011) Peat bog wildfire smoke exposure in rural North Carolina is associated with cardiopulmonary emergency department visits assessed through syndromic surveillance. Environ Health Perspect 119:1415–1420
Reeves MC, Kost JR, Ryan KC (2006) Fuels products of the LANDFIRE project. In: Andrews PL, Butler BW (eds) Fuels management—how to measure success (Proceedings RMRS-P-41, pp. 239–249). U.S. Forest Service, Rocky Mountain Research Station, Fort Collins
Reinhardt ED, Keane RE, Calkin DE, Cohen JD (2008) Objectives and considerations for wildland fuel treatment in forested ecosystems of the interior western United States. For Ecol Manage 256:1997–2006
Reinhardt E, Crookston NL (2003) The fire and fuels extension to the forest vegetation simulator. (General Technical Report RMRS-GTR-116). U.S. Forest Service, Rocky Mountain Research Station, Ogden
Reinhardt E, Keane RE, Brown JK (1997) First order fire effects model: FOFEM 4.0 user's guide (General Technical Report INT-GTR-344). U.S. Forest Service, Intermountain Research Station, Ogden
Riccardi CL, Prichard SJ, Sandberg DV, Ottmar RD (2007a) Quantifying physical characteristics of wildland fuels using the fuel characteristic classification system. Can J for Res 37:2413–2420
Riccardi CL, Ottmar RD, Sandberg DV et al (2007b) The fuelbed: a key element of the fuel characteristic classification system. Can J for Res 37:2394–2412
Roberts G, Wooster M, Lagoudakis E (2009) Annual and diurnal African biomass burning temporal dynamics. Biogeosciences 6:849–866
Rollins MG (2009) LANDFIRE: A nationally consistent vegetation, wildland fire, and fuel assessment. Int J Wildland Fire 18:235–249
Rowell E, Loudermilk EL, Seielstad C, O’Brien JJ (2016) Using simulated 3D surface fuelbeds and terrestrial laser scan data to develop inputs to fire behavior models. Can J Remote Sens 42:443–459
Rowell E, Loudermilk EL, Hawley C et al (2020) Coupling terrestrial laser scanning with 3D fuel biomass sampling for advancing wildland fuels characterization. Forest Ecol Manage 462:117945
Rowell EM (2017) Virtualization of fuelbeds: building the next generation of fuels data for multiple-scale fire modeling and ecological analysis. Ph.D. thesis. University of Montana, Missoula
Roy DP, Jin Y, Lewis P, Justice C (2005) Prototyping a global algorithm for systematic fire-affected area mapping using MODIS time series data. Remote Sens Environ 97:137–162
Ryan KC, Knapp EE, Varner JM (2013) Prescribed fire in North American forests and woodlands: history, current practice, and challenges. Front Ecol Environ 11:e15–e24
Sandberg DV, Dost FN (1990) Effects of prescribed fire on air quality and human health. In: Wasltad JW, Radosevich SR, Sandberg DV (eds) Natural and prescribed fire in Pacific Northwest forests. Oregon State University Press, Corvallis, pp 191–218
Scott JH, Burgan RE (2005) Standard fire behavior fuel models: a comprehensive set for use with Rothermel’s surface fire spread model (General Technical Report RMRS-GTR-153). U.S. Forest Service, Rocky Mountain Research Station, Fort Collins
Seielstad C, Stonesifer C, Rowell E, Queen L (2011) Deriving fuel mass by size class in Douglas-fir (Pseudotsuga menziesii) using terrestrial laser scanning. Remote Sens 3:1691–1709
Seiler W, Crutzen PJ (1980) Estimates of gross and net fluxes of carbon between the biosphere and atmosphere from biomass burning. Clim Change 2:207–247
Sellers PJ (1985) Canopy reflectance, photosynthesis and transpiration. Int J Remote Sens 6:1335–1372
Sexton JO, Bax T, Siqueira P et al (2009) A comparison of lidar, radar, and field measurements of canopy height in pine and hardwood forests of southeastern North America. For Ecol Manage 257:1136–1147
Sikkink PG, Keane RE (2008) A comparison of five sampling techniques to estimate surface fuel loading in montane forests. Int J Wildland Fire 17:363–379
Silva CA, Hudak AT, Vierling LA et al (2016) Imputation of individual longleaf pine (Pinus palustris Mill.) tree attributes from field and LiDAR data. Can J Remote Sens 42:554–573
Silva CA, Hudak AT, Vierling LA et al (2017) Impacts of airborne lidar pulse density on estimating biomass stocks and changes in a selectively logged tropical forest. Remote Sens 9:1068
Skowronski NS, Clark KL, Duveneck M, Hom J (2011) Three-dimensional canopy fuel loading predicted using upward and downward sensing LIDAR systems. Remote Sens Environ 115:703–714
Skowronski NS, Gallagher MR, Warner TA (2020) Decomposing the interactions between fire severity and canopy fuel structure using multi-temporal, active, and passive remote sensing approaches. Fire 3:7
Smith AM, Tinkham WT, Roy DP et al (2013) Quantification of fuel moisture effects on biomass consumed derived from fire radiative energy retrievals. Geophys Res Lett 40:6298–6302
Sokal RR, Rohlf FJ (1981) Biometry. W.H. Freeman and Company, San Francisco
Soil Science Division Staff (2017) Soil survey manual. In: Ditzler C, Scheffe K, Monger HC (eds) USDA Handbook 18. Government Printing Office, Washington, D.C.
Stephens SL, McIver JD, Boerner REJ et al (2012) The effects of forest fuel-reduction treatments in the United States. Bioscience 62:549–560
Swetnam TW, Farella J, Roos CI et al (2016) Multiscale perspectives of fire, climate and humans in western North America and the Jemez Mountains, USA. Philos Trans R Soc b: Biol Sci 371:20150168
Thenkabail PS, Smith RB, De Pauw E (2000) Hyperspectral vegetation indices and their relationships with agricultural crop characteristics. Remote Sens Environ 71:158–182
Thompson DK, Waddington JM (2014) A Markov Chain method for simulating bulk density profiles in boreal peatlands. Geoderma 232–234:123–129
Thornton PE, Law BE, Gholz HL et al (2002) Modeling and measuring the effects of disturbance history and climate on carbon and water budgets in evergreen needleleaf forests. Agric for Meteorol 113:185–222
Tinkham WT, Hoffman CM, Canfield JM et al (2016) Using the photoload technique with double sampling to improve surface fuel loading estimates. Int J Wildland Fire 25:224–228
Tucker CJ (1977) Asymptotic nature of grass canopy spectral reflectance. Appl Opt 16:1151–1156
Urbanski S (2014) Wildland fire emissions, carbon, and climate: emission factors. For Ecol Manage 317:51–60
van der Werf GR, Randerson JT, Giglio L et al (2006) Interannual variability of global biomass burning emissions from 1997 to 2004. Atmos Chem Phys 6:3423–3441
van der Werf GR, Randerson JT, Giglio L et al (2010) Fire emissions and the contribution of deforestation, savanna, forest, agricultural and peat fires (1997–2009). Atmos Chem Phys 10:11707–11735
Varner JM, Hiers JK, Ottmar RD et al (2007) Tree mortality resulting from re-introducing fire to long-ununburned longleaf pine ecosystems: the importance of duff moisture. Can J for Res 37:1349–1358
Vermote E, Ellicott E, Dubovik O et al (2009) An approach to estimate global biomass burning emissions of organic and black carbon from MODIS fire radiative power. J Geophys Res: Atmosp 114:D18205
Viney NR (1991) A review of fine fuel moisture modelling. Int J Wildland Fire 1:215–234
Wallace L, Lucieer A, Watson C, Turner D (2012) Development of a UAV-LiDAR system with application to forest inventory. Remote Sens 4:1519–1543
Wallace L, Saldias DS, Reinke K et al (2019) Using orthoimages generated from oblique terrestrial photography to estimate and monitor vegetation cover. Ecol Ind 101:91–101
Wang C, Glenn NF (2009) Estimation of fire severity using pre- and post-fire LiDAR data in sagebrush steppe rangelands. Int J Wildland Fire 18:848–856
Warneke C, Schwarz JP, Ryerson T et al (2018) Fire influence on regional global environments and air quality (FIREX-AQ): A NOAA/NASA interagency intensive study of North American fires. https://www.esrl.noaa.gov/csd/projects/firex/whitepaper.pdf. 13 July 2020
Weise DR, Wright CS (2014) Wildland fire emissions, carbon and climate: characterizing wildland fuels. For Ecol Manage 317:26–40
Williams FA (2018) Combustion theory, 2nd edn. CRC Press, Taylor and Francis Group, Boca Raton
Wooster MJ, Roberts G, Perry G, Kaufman Y (2005) Retrieval of biomass combustion rates and totals from fire radiative power observations: FRP derivation and calibration relationships between biomass consumption and fire radiative energy release. J Geophys Res: Atmosp 110:D24311
Wooster MJ, Roberts G, Smith AM et al (2013) Thermal remote sensing of active vegetation fires and biomass burning events. In: Kuenzer C, Dech S (eds) Thermal infrared remote sensing: sensors, methods, applications. Springer, Dordrecht, pp 347–390
Zarco-Tejada PJ, Diaz-Varela R, Angileri V, Loudjani P (2014) Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur J Agron 55:89–99
Ziegler JP, Hoffman C, Battaglia M, Mell W (2017) Spatially explicit measurements of forest structure and fire behavior following restoration treatments in dry forests. For Ecol Manage 386:1–12
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 This is a U.S. government work and not under copyright protection in the U.S.; foreign copyright protection may apply
About this chapter

Cite this chapter
Prichard, S.J. et al. (2022). Fuels and Consumption. In: Peterson, D.L., McCaffrey, S.M., Patel-Weynand, T. (eds) Wildland Fire Smoke in the United States. Springer, Cham. https://doi.org/10.1007/978-3-030-87045-4_2
Download citation
DOI: https://doi.org/10.1007/978-3-030-87045-4_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-87044-7
Online ISBN: 978-3-030-87045-4
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)