
Abstract
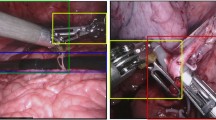
We study the task of semantic segmentation of surgical instruments in robotic-assisted surgery scenes. We propose the Instance-based Surgical Instrument Segmentation Network (ISINet), a method that addresses this task from an instance-based segmentation perspective. Our method includes a temporal consistency module that takes into account the previously overlooked and inherent temporal information of the problem. We validate our approach on the existing benchmark for the task, the Endoscopic Vision 2017 Robotic Instrument Segmentation Dataset [2], and on the 2018 version of the dataset [1], whose annotations we extended for the fine-grained version of instrument segmentation. Our results show that ISINet significantly outperforms state-of-the-art methods, with our baseline version duplicating the Intersection over Union (IoU) of previous methods and our complete model triplicating the IoU.
C. González and L. Bravo-Sánchez—Both authors contributed equally to this work.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Allan, M., et al.: 2018 robotic scene segmentation challenge. arXiv preprint arXiv:2001.11190 (2020)
Allan, M., et al.: 2017 robotic instrument segmentation challenge. arXiv preprint arXiv:1902.06426 (2019)
Bodenstedt, S., et al.: Comparative evaluation of instrument segmentation and tracking methods in minimally invasive surgery. arXiv preprint arXiv:1805.02475 (2018)
Bouget, D., Benenson, R., Omran, M., Riffaud, L., Schiele, B., Jannin, P.: Detecting surgical tools by modelling local appearance and global shape. IEEE Trans. Med. Imaging 34(12), 2603–2617 (2015)
Butler, D.J., Wulff, J., Stanley, G.B., Black, M.J.: A naturalistic open source movie for optical flow evaluation. In: Fitzgibbon, A., Lazebnik, S., Perona, P., Sato, Y., Schmid, C. (eds.) ECCV 2012. LNCS, vol. 7577, pp. 611–625. Springer, Heidelberg (2012). https://doi.org/10.1007/978-3-642-33783-3_44
Du, X., et al.: Articulated multi-instrument 2-D pose estimation using fully convolutional networks. IEEE Trans. Med. Imaging 37(5), 1276–1287 (2018). https://doi.org/10.1109/tmi.2017.2787672
Lee, E.J., Plishker, W., Liu, X., Kane, T., Bhattacharyya, S.S., Shekhar, R.: Segmentation of surgical instruments in laparoscopic videos: training dataset generation and deep-learning-based framework, vol. 10951 (2019). https://doi.org/10.1117/12.2512994
García-Peraza-Herrera, L.C., et al.: ToolNet: holistically-nested real-time segmentation of robotic surgical tools. In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5717–5722. IEEE (2017)
García-Peraza-Herrera, L.C., et al.: Real-time segmentation of non-rigid surgical tools based on deep learning and tracking. In: Peters, T., et al. (eds.) CARE 2016. LNCS, vol. 10170, pp. 84–95. Springer, Cham (2017). https://doi.org/10.1007/978-3-319-54057-3_8
He, K., Gkioxari, G., Dollar, P., Girshick, R.: Mask R-CNN. In: The IEEE International Conference on Computer Vision (ICCV), October 2017
He, K., Zhang, X., Ren, S., Sun, J.: Deep residual learning for image recognition. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 770–778 (2016)
Ilg, E., Mayer, N., Saikia, T., Keuper, M., Dosovitskiy, A., Brox, T.: FlowNet 2.0: evolution of optical flow estimation with deep networks. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), July 2017. http://lmb.informatik.uni-freiburg.de//Publications/2017/IMKDB17
Islam, M., Li, Y., Ren, H.: Learning where to look while tracking instruments in robot-assisted surgery. In: Shen, D., et al. (eds.) MICCAI 2019. LNCS, vol. 11768, pp. 412–420. Springer, Cham (2019). https://doi.org/10.1007/978-3-030-32254-0_46
Jin, Y., Cheng, K., Dou, Q., Heng, P.-A.: Incorporating temporal prior from motion flow for instrument segmentation in minimally invasive surgery video. In: Shen, D., et al. (eds.) MICCAI 2019. LNCS, vol. 11768, pp. 440–448. Springer, Cham (2019). https://doi.org/10.1007/978-3-030-32254-0_49
Joskowicz, L.: Computer-aided surgery meets predictive, preventive, and personalized medicine. EPMA J. 8(1), 1–4 (2017)
Jung, I., Son, J., Baek, M., Han, B.: Real-time MDNet. In: Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y. (eds.) ECCV 2018. LNCS, vol. 11208, pp. 89–104. Springer, Cham (2018). https://doi.org/10.1007/978-3-030-01225-0_6
Kletz, S., Schoeffmann, K., Benois-Pineau, J., Husslein, H.: Identifying surgical instruments in laparoscopy using deep learning instance segmentation. In: 2019 International Conference on Content-Based Multimedia Indexing (CBMI), pp. 1–6 (2019)
Kurmann, T., et al.: Simultaneous recognition and pose estimation of instruments in minimally invasive surgery. In: Descoteaux, M., Maier-Hein, L., Franz, A., Jannin, P., Collins, D.L., Duchesne, S. (eds.) MICCAI 2017. LNCS, vol. 10434, pp. 505–513. Springer, Cham (2017). https://doi.org/10.1007/978-3-319-66185-8_57
Lalys, F., Jannin, P.: Surgical process modelling: a review. Int. J. Comput. Assist. Radiol. Surg. 9(3), 495–511 (2013)
Lin, T.-Y., et al.: Microsoft COCO: common objects in context. In: Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T. (eds.) ECCV 2014. LNCS, vol. 8693, pp. 740–755. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10602-1_48
Long, J., Shelhamer, E., Darrell, T.: Fully convolutional networks for semantic segmentation. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 3431–3440 (2015)
Massa, F., Girshick, R.: MaskRCNN-benchmark: fast, modular reference implementation of Instance Segmentation and Object Detection algorithms in PyTorch (2018). https://github.com/facebookresearch/maskrcnn-benchmark
Mohammed, A., Yildirim, S., Farup, I., Pedersen, M., Hovde, Ø.: Streoscennet: surgical stereo robotic scene segmentation, vol. 10951 (2019). https://doi.org/10.1117/12.2512518
Reda, F., Pottorff, R., Barker, J., Catanzaro, B.: flownet2-pytorch: pytorch implementation of flownet 2.0: evolution of optical flow estimation with deep networks (2017). https://github.com/NVIDIA/flownet2-pytorch
Ronneberger, O., Fischer, P., Brox, T.: U-Net: convolutional networks for biomedical image segmentation. In: Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F. (eds.) MICCAI 2015. LNCS, vol. 9351, pp. 234–241. Springer, Cham (2015). https://doi.org/10.1007/978-3-319-24574-4_28
Ross, T., et al.: Robust medical instrument segmentation challenge 2019. arXiv preprint arXiv:2003.10299 (2020)
Shvets, A.A., Rakhlin, A., Kalinin, A.A., Iglovikov, V.I.: Automatic instrument segmentation in robot-assisted surgery using deep learning (2018)
Spediel, S., et al.: Surgical workflow and skill analysis (2019). https://endovissub-workflowandskill.grand-challenge.org
Intuitive Surgical: Da vinci surgical system (2019). https://www.intuitive.com/en-us/products-and-services/da-vinci
Sznitman, R., Ali, K., Richa, R., Taylor, R.H., Hager, G.D., Fua, P.: Data-driven visual tracking in retinal microsurgery. In: Ayache, N., Delingette, H., Golland, P., Mori, K. (eds.) MICCAI 2012. LNCS, vol. 7511, pp. 568–575. Springer, Heidelberg (2012). https://doi.org/10.1007/978-3-642-33418-4_70
Sznitman, R., Becker, C., Fua, P.: Fast part-based classification for instrument detection in minimally invasive surgery. In: Golland, P., Hata, N., Barillot, C., Hornegger, J., Howe, R. (eds.) MICCAI 2014. LNCS, vol. 8674, pp. 692–699. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10470-6_86
Twinanda, A.P., Shehata, S., Mutter, D., Marescaux, J., De Mathelin, M., Padoy, N.: EndoNet: a deep architecture for recognition tasks on laparoscopic videos. IEEE Trans. Med. Imaging 36(1), 86–97 (2017)
Acknowledgments
The authors thank Dr. Germán Rosero for his support in the verification of the instrument type annotations.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
1 Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
González, C., Bravo-Sánchez, L., Arbelaez, P. (2020). ISINet: An Instance-Based Approach for Surgical Instrument Segmentation. In: Martel, A.L., et al. Medical Image Computing and Computer Assisted Intervention – MICCAI 2020. MICCAI 2020. Lecture Notes in Computer Science(), vol 12263. Springer, Cham. https://doi.org/10.1007/978-3-030-59716-0_57
Download citation
DOI: https://doi.org/10.1007/978-3-030-59716-0_57
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-59715-3
Online ISBN: 978-3-030-59716-0
eBook Packages: Computer ScienceComputer Science (R0)