
Abstract
Most state-of-the-art approaches to road extraction from aerial images rely on a CNN trained to label road pixels as foreground and remainder of the image as background. The CNN is usually trained by minimizing pixel-wise losses, which is less than ideal to produce binary masks that preserve the road network’s global connectivity.
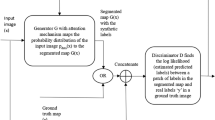
To address this issue, we introduce an Adversarial Learning (AL) strategy tailored for our purposes. A naive one would treat the segmentation network as a generator and would feed its output along with ground-truth segmentations to a discriminator. It would then train the generator and discriminator jointly. We will show that this is not enough because it does not capture the fact that most errors are local and need to be treated as such. Instead, we use a more sophisticated discriminator that returns a label pyramid describing what portions of the road network are correct at several different scales.
This discriminator and the structured labels it returns are what gives our approach its edge and we will show that it outperforms state-of-the-art ones on the challenging RoadTracer dataset.
This work was funded in part by the Swiss National Science Foundation.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


Notes
- 1.
Ground truth mask does not show most of the actual roads because of the omission noise.
References
Barzohar, M., Cooper, D.B.: Automatic finding of main roads in aerial images by using geometric-stochastic models and estimation. IEEE Trans. Pattern Anal. Mach. Intell. 18(7), 707–721 (1996)
Bastani, F., et al.: RoadTracer: automatic extraction of road networks from aerial images. In: Conference on Computer Vision and Pattern Recognition (2018)
Batra, A., Singh, S., Pang, G., Basu, S., Jawahar, C., Paluri, M.: Improved road connectivity by joint learning of orientation and segmentation. In: Conference on Computer Vision and Pattern Recognition, June 2019
Bengio, Y., Léonard, N., Courville, A.: Estimating or propagating gradients through stochastic neurons for conditional computation. In: arXiv Preprint (2013)
Biagioni, J., Eriksson, J.: Inferring road maps from global positioning system traces: survey and comparative evaluation. Transp. Res. Rec. J. Transp. Res. Board 2291, 61–71 (2012)
Chai, D., Forstner, W., Lafarge, F.: Recovering line-networks in images by junction-point processes. In: Conference on Computer Vision and Pattern Recognition (2013)
Chen, Y., Li, W., Van Gool, L.: ROAD: Reality oriented adaptation for semantic segmentation of urban scenes. In: Conference on Computer Vision and Pattern Recognition. pp. 7892–7901 (2018)
Cheng, G., Wang, Y., Xu, S., Wang, H., Xiang, S., Pan, C.: Automatic road detection and centerline extraction via cascaded end-to-end convolutional neural network. IEEE Trans. Geosci. Remote Sens. 55(6), 3322–3337 (2017)
Chu, H., et al.: Neural turtle graphics for modeling city road layouts. In: International Conference on Computer Vision (2019)
Demir, I., et al.: DeepGlobe 2018: a challenge to parse the earth through satellite images. In: Conference on Computer Vision and Pattern Recognition, June 2018
Etten, A.V., Lindenbaum, D., Bacastow, T.: SpaceNet: a remote sensing dataset and challenge series. CoRR abs/1807.01232 (2018). http://arxiv.org/abs/1807.01232
Goodfellow, I., et al.: Generative adversarial nets. In: Advances in Neural Information Processing Systems (2014)
Iizuka, S., Simo-Serra, E., Ishikawa, H.: Globally and locally consistent image completion. ACM Trans. Graph. 36(4), 1–14 (2017)
Isola, P., Zhu, J., Zhou, T., Efros, A.A.: Image-to-image translation with conditional adversarial networks. In: Conference on Computer Vision and Pattern Recognition (2017)
Kingma, D.P., Ba, J.: Adam: a method for stochastic optimization. In: International Conference on Learning Representations (2015)
Laptev, I., Mayer, H., Lindeberg, T., Eckstein, W., Steger, C., Baumgartner, A.: Automatic extraction of roads from aerial images based on scale space and snakes. Mach. Vis. Appl. 12, 23–31 (2000). https://doi.org/10.1007/s001380050121
Li, Z., Wegner, J., Lucchi, A.: Topological map extraction from overhead images. In: International Conference on Computer Vision (2019)
Máttyus, G., Luo, W., Urtasun, R.: DeepRoadMapper: extracting road topology from aerial images. In: International Conference on Computer Vision, pp. 3458–3466 (2017)
Mnih, V., Hinton, G.: Learning to label aerial images from noisy data. In: International Conference on Machine Learning (2012)
Mnih, V., Hinton, G.E.: Learning to detect roads in high-resolution aerial images. In: Daniilidis, K., Maragos, P., Paragios, N. (eds.) ECCV 2010. LNCS, vol. 6316, pp. 210–223. Springer, Heidelberg (2010). https://doi.org/10.1007/978-3-642-15567-3_16
Mosińska, A., Kozinski, M., Fua, P.: Joint segmentation and path classification of curvilinear structures. IEEE Trans. Pattern Anal. Mach. Intell. 42(6), 1515–1521 (2019)
Mosińska, A., Marquez-Neila, P., Kozinski, M., Fua, P.: Beyond the pixel-wise loss for topology-aware delineation. In: Conference on Computer Vision and Pattern Recognition, pp. 3136–3145 (2018)
Máttyus, G., Urtasun, R.: Matching adversarial networks. In: Conference on Computer Vision and Pattern Recognition (2018)
Paszke, A., et al.: Automatic differentiation in PyTorch. In: NIPS-W (2017)
Ronneberger, O., Fischer, P., Brox, T.: U-Net: convolutional networks for biomedical image segmentation. In: Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F. (eds.) MICCAI 2015. LNCS, vol. 9351, pp. 234–241. Springer, Cham (2015). https://doi.org/10.1007/978-3-319-24574-4_28
Stoica, R., Descombes, X., Zerubia, J.: A Gibbs point process for road extraction from remotely sensed images. Int. J. Comput. Vision 57(2), 121–136 (2004). https://doi.org/10.1023/B:VISI.0000013086.45688.5d
Turetken, E., Benmansour, F., Andres, B., Pfister, H., Fua, P.: Reconstructing loopy curvilinear structures using integer programming. In: Conference on Computer Vision and Pattern Recognition, June 2013
Ventura, C., Pont-Tuset, J., Caelles, S., Maninis, K., Gool, L.V.: Iterative deep learning for network topology extraction. In: British Machine Vision Conference (2018)
Wang, T.C., Liu, M.Y., Zhu, J.Y., Tao, A., Kautz, J., Catanzaro, B.: High-resolution image synthesis and semantic manipulation with conditional GANs. In: Conference on Computer Vision and Pattern Recognition (2018)
Wang, W., Yu, K., Hugonot, J., Fua, P., Salzmann, M.: Recurrent U-Net for resource-constrained segmentation. In: International Conference on Computer Vision (2019)
Wegner, J., Montoya-Zegarra, J., Schindler, K.: A higher-order CRF model for road network extraction. In: Conference on Computer Vision and Pattern Recognition, pp. 1698–1705 (2013)
Wiedemann, C., Heipke, C., Mayer, H., Jamet, O.: Empirical evaluation of automatically extracted road axes. In: Empirical Evaluation Techniques in Computer Vision, pp. 172–187 (1998)
Yang, X., Li, X., Ye, Y., Lau, R.Y.K., Zhang, X., Huang, X.: Road detection and centerline extraction via deep recurrent convolutional neural network U-Net. IEEE Trans. Geosci. Remote Sens. 57(9), 7209–7220 (2019)
Yin, P., Lyu, J., Zhang, S., Osher, S.J., Qi, Y., Xin, J.: Understanding straight-through estimator in training activation quantized neural nets. In: International Conference on Learning Representations (2019)
Zhou, L., Zhang, C., Wu, M.: D-LinkNet: LinkNet with pretrained encoder and dilated convolution for high resolution satellite imagery road extraction. In: CVPR Workshops (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
1 Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Vasu, S., Kozinski, M., Citraro, L., Fua, P. (2020). TopoAL: An Adversarial Learning Approach for Topology-Aware Road Segmentation. In: Vedaldi, A., Bischof, H., Brox, T., Frahm, JM. (eds) Computer Vision – ECCV 2020. ECCV 2020. Lecture Notes in Computer Science(), vol 12372. Springer, Cham. https://doi.org/10.1007/978-3-030-58583-9_14
Download citation
DOI: https://doi.org/10.1007/978-3-030-58583-9_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-58582-2
Online ISBN: 978-3-030-58583-9
eBook Packages: Computer ScienceComputer Science (R0)