
Abstract
The introduction of Autonomous Vehicles (AVs) will have far-reaching effects on road traffic in cities and on highways. The implementation of Automated Highway Systems (AHS), possibly with a dedicated lane only for AVs, is believed to be a requirement to maximise the benefit from the advantages of AVs. We study the ramifications of an increasing percentage of AVs on the whole traffic system with and without the introduction of a dedicated highway AV lane. We conduct a macroscopic simulation of the city of Singapore under user equilibrium conditions with realistic traffic demand. We present findings regarding average travel time, throughput, road usage, and lane-access control. Our results show a reduction of average travel time as a result of increasing the portion of AVs in the system. We show that the introduction of an AV lane is not beneficial in terms of average commute time. Furthermore a notable shift of travel demand away from the highways towards major and small roads is noticed in early stages of AV penetration of the system. Finally, our findings show that after a certain threshold percentage of AVs the differences between AV and no AV lane scenarios become negligible.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Autonomous vehicles have ceased to be only a vision but are rapidly becoming a reality as cities around the world such as Pittsburgh, San Francisco, and Singapore have begun investigating and testing autonomous mobility concepts [1]. The planned introduction of thousands of autonomous taxis, as currently planned in Singapore [1], poses a challenge not only to the in-car systems of the AV, but also to the entire traffic system itself.
Besides the deployment of more efficient ride sharing systems and the reduction of the total number of vehicles on the road, AVs can traverse a road faster while using less space. With the goal of achieving the maximum benefit in terms of traffic speeds and congestion reduction, the mixing of AVs and Conventional Vehicles (CVs) is a challenging problem [2]. One method to achieve this is the introduction of dedicated AV lanes on highways to allow AVs to operate more efficiently due to the absence of unpredictable random behaviour introduced by humans and the use of communication capabilities to coordinate local traffic, e.g. platoon organization [3].
Depending on the portion of AVs in the system, blocking certain lanes for CVs, and thereby limiting the overall road capacity for human drivers is certainly a step that can have considerable ramifications. While at the early stages, where only few AVs are on the road, it would constitute an incentive to obtain an AV, it could also possibly generate traffic congestion and increase travel times for other vehicles [4]. As the level of AV penetration in the road transportation system increases, the total congestion level would likely drop, however, the advantage of using AVs over CVs would gradually be diminished as well.
Lastly, converting highways into AHS could also affect the rest of the road network, as drivers of CVs may then choose a different route, caused by the changed capacity of the highway, which can lead to a mismatch between road network and traffic demand [5].
In this paper, we take a closer look at the benefits and drawbacks of introducing a dedicated AV lane on major highways Singapore. With a focus on the effect of an increasing percentage of AVs in the system, we study the impact of dedicated AV lanes in terms of capacity, travel time, and effect on other roads. We compare this scenario to a setting where no dedicated AV lanes are assigned. In short, our main contributions are:
-
Using a macroscopic traffic simulation of the city-state of Singapore and using realistic travel demand, we show the impact of vehicle automation with and without AV lanes.
-
We evaluate the overall impact of AV penetration on the system travel time.
-
We discuss the city-scale effects, in particular how the demand and the throughput of other roads is affected.
-
We quantify the effects caused by lane-access control.
2 Related Work
Automated Highway Systems (AHS) and their implications have received wide attention from both researchers and industry around the world. Investigations include general AHS policies and concepts [2, 6], effects on travel times and capacity [6,7,8,9,10,11,12,13], traffic safety [6, 8, 13, 14], and interactions between conventional human-driven vehicles and autonomous vehicles [15].
Several AHS studies and field trials were conducted as part of the California Partners for Advanced Transit and Highways (PATH) program: Tsao et al. discuss the relationship between lane changing manoeuvres and the overall throughput of the highway [9]. Their analytical and simulation results indicate a direct trade-off between the two. Lateral movement decreases the traffic flow, and higher traffic flow leads to longer lane change times. In this work, we ignore decreased throughput caused by lane changing and focus on a best-case city-wide benefits of dedicated AV lanes.
Godbole and Lygeros evaluate the increased capacity by the introduction of fully automated highways by treating the highway as a single-lane AHS pipe [14]. Similar to the work of Harwood and Reed [10], they study different platoon sizes and speeds but do not consider separated AV and CV lanes.
The pipeline capacity of AHSs was also studied by Michael et al. [11]. Their results show that longer AV platoons are favourable as they increase the capacity of the road due to lower inter-platoon distances. A high mixture of different vehicle classes, however, leads to a lower capacity. Lastly, the presented analytical model shows that as highway speed increases, the capacity reaches a saturation point after which the speed decreases again. This is inline with the findings presented in this paper when studying the throughput on only the AV lane.
Capacity analysis for managed lanes on highways were studied by Fakhariam Qom et al. using a combined macroscopic and mesoscopic analysis approach [16]. The authors analysed the capacity increase based on a mix of different headway time as well as the percentage of vehicles preferring the managed lanes over the general purpose lanes. Their study included one corridor with a fixed number of lanes, so they could not show effects on other general purpose links in the network. Ghiasi et al. also presented results on highway capacity in mixed traffic scenarios, analyzing the effect of different headway settings [17]. They show that when assumed that the headway an AV maintains to another AV is different from the headway it maintains to a human driven car, (and vice versa), the capacity does not necessarily increase steadily. They also show that the capacity strongly depends on the level of platooning. Assuming static headways for AVs and CVs, their findings are aligned with the ones presented in this paper.
In summary, it appears that while AHS seem to be a well-studied subject, a general evaluation of the introduction of AV lanes and their system-wide implications is still missing. Automated highways are mostly investigated in an isolated manner (and often also simplified to a 1-lane road) without taking into considering the rest of the road network. Using the city-state of Singapore as a case study, we show how travel times of both AVs and CVs are affected and that the introduction of dedicated AV lanes has a considerable effect on the entire road network by changing the distribution of traffic demand within the transportation system.
3 System Model
The goal of this study is to evaluate the allocation of one lane on every highway road to be used exclusively by autonomous vehicles. We investigate an increasing percentage of AVs in the system under two scenarios: with and without dedicated AV lanes on highways. In the former scenario, all roads that are not highways will exhibit normal traffic conditions as there will be a mixture of human drivers and AVs. All lanes on the highway roads will be accessible to AVs, while CVs will be able to utilize all lanes except one lane, which will be allocated exclusively for AVs usage. In the second scenario, all vehicles will share all lanes on all roads.
We model the different behaviour of AVs and CVs by means of smaller headway time, that is the time gap to the vehicle in front. In our scenario, we assume fully automated vehicles with no necessary human driver interaction (SAE Level 4+). We therefore further assume that AVs can afford a much smaller headway than normal vehicles since their reaction time is orders of magnitude smaller than that of humans [18]. A direct consequence of this is that effectively the capacity of the road is increased, as AVs need less space. The capacity (in cars per hour per lane) can then be calculated as follows:
where \(h_{av}\) is the headway time for AVs (values may vary between 0.5 and 1 s, depending on level of comfort [13, 17]), \(p_{av}\) is the percentage of AVs on the road segment, \(h_{cv}\) is the headway time for conventional vehicles set to 1.8 s. Equation 1 is based on [19], where it was derived from collected data on highway roads in Japan for varying percentages of vehicles with AHS.
If it is assumed that AVs maintain a different headway to CVs than they do to other AVs (and vice versa for CVs), then Eq. (1) can be extended according to Hussain et al. [20] where the denominator becomes: \(p_{av}^2h_{aa} + p_{av}(1-p_{av})(h_{ac}+h_{ca}) + (1-p_{av})^2h_{cc}\), with \(h_{ac}\) being the headway of autonomous vehicles to conventional vehicles and so on. For the remainder of the paper we will assume a conservative AV headway of \(h_{av} = 1s\) as well as \(h_{aa}=h_{ac}=h_{av}\) and \(h_{cc}=h_{ca}=h_{cv}\).
The primary measure we use to evaluate the impact on traffic caused by the introduction of an AV lane is the travel time of cars. The travel time \(T = \sum _i^n t_i\) of a vehicle is determined by the traverse times of all n segments (or links) included in its route. The traverse time \(t_i\) of a segment i can be computed using the Bureau of Public Roads (BPR) function [21]:
where \(l_i\) is length of the road segment, \({v}_i\) is the free flow velocity of the segment, \(F_i\) is flow, \(w_i\) is the number of lanes, t is time duration of the simulated period, \(C_i\) is the capacity of road segment i, \(\alpha _i\) and \(\beta _i\) are parameters from the BPR function.
Free flow velocities \(\hat{v}\) are extracted from historical GPS tracking data [22]. Parameters \(\alpha _i\) and \(\beta _i\) are calibrated for different classes of roads depending on their speed limits using both GPS tracking data and a travel time distribution of the population for certain periods of the day. For a more detailed description of the calibration and validation procedures we refer the reader to [23].
4 City-Wide Simulation Study
We conduct a macroscopic city-wide simulation study of the city-state of Singapore to better understand the effects to be expected in a complex environment. We take a look at the traffic conditions on the highway, but also closely investigate the effect dedicated AV lanes have on the rest of the road network.
4.1 Methodology
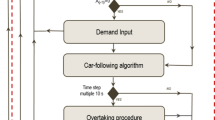
In order to evaluate the scenarios of AV introduction in a road transportation system, we make use of an agent-based macroscopic simulation approach. The simulation consists of three steps: (1) agent generation, (2) route computation and (3) travel time estimation.
The underlying road network on which the traffic assignment is performed is modelled by means of a uni-directional graph, where each edge represents a road segment and nodes represent decision points at which a road may split or merge.
To introduce dedicated AV lanes, we alter the original graph by duplicating start and stop nodes of highway segments and creating a new edge to represent the AV lane, while removing one of the normal lanes from the original segment. In a way, we model the lane traffic dynamics by making the AV lane a separate road parallel to the original one. Connections are added between the start and end nodes and their respective copies so that vehicles can change lanes at the start/end of highway road segments. It must be noted, however, that the effect of traffic congestion due to the lane changing manoeuvres for joining or leaving the AV lane is not taken into consideration. Therefore, we have to assume that AVs perform lane changes in a non-obtrusive manner, meaning that their politeness on the road is very high, and they try to disrupt traffic flow as little as possible. This is assumption is not very far fetched given the great amount of safety requirements AVs need to satisfy.
Every agent is generated with an origin and destination sampled from an origin-destination (OD) matrix representing the travel demand of the system. Realistic traffic volume is modelled by synthesizing a sufficiently large vehicle population according to the available survey data.
The routes of the agents are computed using an incremental user equilibrium approach [24] aiming at representing reality in the sense that every driver is satisfied with their route and would not choose a different one given the current traffic situation. We assume a driver is satisfied when they are on the shortest route from origin to destination in terms of travel time. Routing is performed on the road network graph, where each edge has an attached weight representing the current traverse time of this road segment. Weights are updated after every batch route computation. To disallow conventional vehicles from using the AV lane, the weight of the edges representing these lanes are set to infinity when the route of a CV is computed and set back to their traverse time values for AV route computation.
Further assumptions regarding to the macroscopic simulation include:
-
Agents want to minimize travel time and all perceive the traffic situation in the same way (there is no noise in the observations of the traffic states).
-
Traffic is spread homogeneously in time during the simulation. In order for the BPR function (Eq. 2) to give a reasonable estimation of the traffic conditions, the flow F during the simulation time t needs to be spread homogeneously in time.
-
Agents do not reroute while on their trip. In reality, drivers may change their trip plan dynamically according to unexpected events or observed traffic conditions ahead. As our traffic assignment provides information to the drivers about expected traffic conditions for the whole network, we assume that such events will not occur as drivers are given all the information they need prior to their trip.
-
AVs use the same headway regardless of the car in front of them. This assumption is acceptable on this level of detail, in our opinion, as it accounts for simply removing the reaction time of the human driver.
-
Lane changing manoeuvres performed by AVs do not have a considerable effect on traffic flow relative to the effect of lane changes in general due to the high level of politeness of AVs on the road dictated by the high level of imposed safety requirements. To quantify the real impact of lane changes based on the number of lanes, the traffic density and the speed, a microscopic model would be required.
4.2 Data and Scenario Description
We examine the city-state of Singapore with a total population of 5.4 million and around 1 million registered vehicles including taxis, delivery vans and public transportation vehicles. The fact that Singapore is situated on an island simplifies our scenario as the examined system is relatively closed with only two expressways leading out of the country. There are 3495 km or roads of which 652 km are major arterial roads and 161 km are expressways spreading over 715 squared km of land area. We have used publicly available data to acquire a unidirectional graph of the road network of Singapore, compromising of 240, 000 links and 160, 000 nodes. The number of lanes, speed limit and length of every link is available allowing us to extract information about its capacity.
For the purposes of our model we make use of two separate data sets. The first data set consists of GPS trajectories of a 20, 000 vehicle fleet for the duration of one month, providing information about recorded velocities on the road network during different times of the day [22]. The second one is the Household Interview Travel Survey (HITS) conducted in 2012 in the city of Singapore, which studies the traffic habits of the population. Information about the origin destination pairs, their temporal nature, and commuting time distribution during rush hour periods is extracted from it.
In order to achieve realistic traffic conditions, we estimated the number of agents based on the Singapore HITS data. We extracted the ratio of people who actively create traffic on the streets (cab drivers, personal vehicle drivers, lorry drivers) and the total number of people interviewed.
We chose the morning commute hours (7:30 am–8:30 am) as the period which seems to be the most stable in terms of traffic volume and estimated the traffic demand consisting of 309, 000 agents.

Average travel time of whole population, AVs and CVs as a function of AV percentage
Similar to the simplistic example the vehicle population is split into two parts: AV and CV. The percentage of AVs is varied in order to observe the effects in the initial stages of AV introduction, as well as the possible traffic situation if all vehicles were autonomous. We choose at random which vehicles will be autonomous.
In order to have a benchmark for measuring the efficiency of the suggested policy, we also evaluate the scenario where no AV lane is introduced and all vehicles can access all lanes on all roads. The analytical solution acquired for the simplistic example in the previous section indicates that the scenario with no AV lane will produce better or at least the same system performance as the introduction of the AV lane. Our case study will test our analytical results for a more realistic transportation system environment.
4.3 Effects on Average Travel Time
We evaluated the change in average commute time based on the percentage of AVs in the system. We compare two different settings: with and without a dedicated AV lane. As a baseline we use the average commute time without the existence of AVs (and thus no exclusive lanes). This time was found to be approx. 18.5 min and can be seen as the status quo.
We simulated both settings with the exact same travel demand, that is, identical origin-destination pairs for all vehicles. We then gradually increased the percentage of AVs in the system. The number of vehicles in the simulation was invariant; a higher percentage of AVs means that CVs were replaced with autonomous vehicles.
Figure 1 shows our result. The black dashed line serves as an illustration of the status quo. It can be observed that when introducing a lane exclusively for AVs and thereby taking away capacity from conventional vehicles (Fig. 1a), the travel time for CVs increases, whereas the low percentage of AVs (driving on almost empty lane) travel considerably faster. This could be used as an incentive by policy-makers to increase the share of AVs in the transportation system. With an increasing percentage of AVs we observe that travel times for CVs decrease due to the fact that effectively vehicles move away from the common lane to the AV lane, which in turn increases the travel time on the AV lane. This behaviour can be observed until the AV lane is saturated (somewhere between 40% and 50% AV percentage).
From this point on, the choice of lane makes no difference for newly added AVs as they experience equal travel times regardless whether they choose to take the AV lane or the mixed lane. Therefore, the difference between average travel time of AV and CV decreases. Travel time of both AVs and CVs still decreases with the increase of the percentage of AVs since the capacity of the road network is effectively increased.
Figure 1b shows the comparison between the average travel times for the entire vehicle population with and without the introduction of an AV lane. It can be observed that the setting without an AV lane is always performing better than the AV lane one. After saturation of the AV lane the difference between the two curves becomes marginal. Before saturation of the AV lane, the capacity of the highway is not fully utilized and that, on average, the smaller travel times of the AVs cannot make up for the introduced delays for the CVs. We conclude that adding an AV lane, while initially being an incentive for early adopters, will noticeably penalize drivers of conventional vehicles at the early stages of AV introduction. Additional delays will be introduced by lane changing manoeuvres and other microscopic effects not considered in this macroscopic study [7, 9].
4.4 Analysis of Effect of Headway Time
The headway time of vehicles is a crucial parameter for the computation of the road capacity (see Eq. 1) and therefore an important input for the travel time computation using the BPR function (see Eq. 2).
Although, AVs can afford to have smaller headways, this might negatively affect the comfort of the passengers, as small distances at high velocities can induce anxiety [13]. To this end, we examine the effect of varying the headway time (from 0.5s to 1s) for the city-scale simulation scenario with a dedicated AV lane on highways. It is therefore useful to evaluate the amount of overall travel time decrease as a function of the headway time.

Average travel time curves for varying headway time
In Fig. 2 we observe that depending on the headway, the improvement of overall travel time can vary between \(20\%\) and \(26\%\). The difference between the improvement in the case of all AVs seems is bigger between headway 0.5 s and 0.75 s than between 1 s and 0.75 s.
This is due to the non-linear nature of the BPR function. As vehicles approach free flow velocities due to the increased capacity, any further improvement in capacity plays a smaller role and therefore the gains become less significant. It must be noted, that this happens only when traffic congestion is such that vehicles travel at free flow velocities.
If the system was more congested, we would not be able to observe the decrease of travel time improvement for smaller headway time, since the BPR function will still be in its non-linear part thus providing significant changes of travel time as the capacity is altered.

Road throughput change caused by 50% AVs compared to 0% AVs. Blue colours represent higher throughput; red colours represent lower throughput (intensity indicates strength) (Color figure online)

4.5 Effects on Road Network Throughput and Traffic Distribution
We examine the traffic distribution on the entire road network to gain a better understanding of the changes occurring in traffic conditions as a results of the introduction of dedicated AV lanes. To the best our knowledge, existing literature focuses on the traffic changes on the highways and ramps only. In our work AV lanes are added only to the highways, while the rest of the network remained unchanged, however, we study the changes that occur to the throughput and demand for the whole system.
As a first step, we provide a qualitative measurement by visualizing the impact an introduction of \(50\%\) AVs has on the road network (compared to \(0\%\) AVs). To this end, we draw roads experiencing higher throughput in blue colours and roads experiencing lower throughput in red colours. We show our results for both settings, i.e., with AV lane (Fig. 3a) and without AV lane (Fig. 3b).
It can be observed that in both cases the highways exhibit a considerably higher throughput of vehicles, which is expected since the capacity of the highway is technically increased by the introduction of autonomous vehicles. Other roads exhibit a slight decrease of throughput, which may be due to the changes in routing that are triggered by the AVs, which have a strong preference towards the highways. In other words, the AVs are, in a way, attracted to the highways, since they can traverse fast there and the capacity is sufficient. This, however, makes them willing to pass through more congested roads in order to get to the highway, which creates additional time losses for the regular vehicles. This argument is further strengthened by the fact that the roads leading to the highways do not exhibit increased throughput, although they exhibit higher demand since more vehicles want to use the highways. This means that the level of congestion on those roads is too high to allow an increase of throughput.
Comparing the throughput changes in the two scenarios, it can be observed that the increase of throughput on the highways for the case with no AV lane is smaller. Therefore, the change of routing triggered by the introduction of AVs is qualitatively the same but quantitatively different for the two examined scenarios. This can be observed in Fig. 4a. The relative increase of throughput for highways is almost three times higher for the dedicated AV lane case. Higher level of throughput increase on highways leads to higher level of throughput decrease on the major roads, which represent alternative routes. As mentioned before, if highways become too attractive for AVs, there can be negative effects on traffic conditions stemming from overly utilized roads which lead to the highways. The more balanced distribution of traffic in the no AV lane scenario could be the reason for its slight, however, consistent superiority over the dedicated AV lane case in terms of average travel time observed earlier in Fig. 1b.
Finally, we investigate the change in demand for different types of roads. We define demand for a road as the number of vehicles that have this particular road in their route under user equilibrium traffic assignment. Taking a closer look at the difference in travel demand between the scenario with AV lane and the scenario without the introduction of an AV lane, we measure the relative difference of travel demand between the scenarios. Formally, let the demand for road i for a given AV percentage k be \(D_{i,k}^{a}\) for the AV lane scenario and \(D_{i,k}^{b}\) for the benchmark scenario without an AV lane. Then, for the different classes of road (highways, major roads, other roads), we compute the difference in demand between the two examined scenarios relative to the AV lane scenario (a negative value therefore means that this particular type of road experiences less demand when AV lanes are introduced compared to not introducing AV lanes):
Figure 4b shows our results for highways, major roads, and other roads. For highways, we observe that initially there is lower demand. This is due to the lower road capacity resulting from the dedicated lane, causing more CVs to avoid the highways. With more AVs in the system, the demand for the highways increases until the saturation point of the AV lane is reached. From this point on, the difference between the both settings becomes smaller, eventually converging to zero as the addition of more AVs cause the common lanes to achieve capacity values close to the one of the AV lane.
For the major roads we observe increased demand as CVs will favour these roads as an alternative to the more congested highways caused by the dedicated AV lane. This effect decreases until the saturation point of the AV lane.
At this moment the highways reach their maximum demand difference and therefore a smaller portion of the population takes the alternative routes utilizing major roads. Following the negative peak, the demand difference for major roads also converges to zero as the two scenarios become identical. The difference for smaller roads is less pronounced and can only be observed at a low percentage of AVs in the system. The higher utilization of major roads will also increase traverse time of these roads. Some vehicles will therefore choose to use minor roads as a third alternative.
It is interesting to note that after the saturation point of the AV lane the difference in travel times between the two scenarios is almost negligible, however, the actual assignment of traffic, as can be observed in Fig. 4b, is qualitatively different. This finding indicates that the introduction of an AV lane would not just affect the travel time of the population but also shift the route preferences of commuters.
4.6 Lane Access Control
We showed that AV lanes can provide faster traversal times if the number of cars on this lane is low enough. Once the number of AVs in the system exceed a certain threshold, this benefit diminishes. We therefore look at the benefits and trade-offs when only a subset of all autonomous vehicles (e.g. AV taxis, service vehicles, etc.) have access to the specialized lane.

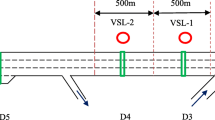
We analyse a simple example of a three-lane highway stretch with one AV lane and two normal lanes. We assume that 10,000 vehicles would like to traverse the road and, as before, we vary the percentage of AVs among those vehicles. Our results are shown in Fig. 5a. It can be seen that the set limit marks the point where the access control scenario diverges from the original one (solid black line). The result is a steady and fast commute on the AV lane for the vehicles with access (dashed lines) and a slower commute for the rest of the population (non-dashed lines). In the no-access control scenario (black lines), the traverse times along the AV and normal lanes is equal after saturation, i.e. where the black lines meet. When a limit is introduced, this is no longer the case and a smaller limit leads to a bigger difference between the two sets of vehicles on the road in terms of traverse time.
In order to better understand the trade-off between the fast commute of specialised vehicles and system travel time, Fig. 5b demonstrates the change of overall average system travel time relative to the scenario where there is no access control on the AV lane. This graph can be seen as the cost the system has to pay for having access control; higher values indicate longer traverse times for the vehicle population compared to the scenario where all AVs can use the dedicated lane. The difference grows as the access limit increases and peaks at the saturation point of the original scenario. This is because the difference of traverse times between AV and normal lanes in the base-line scenario is practically non-existent at (and after) this point. Furthermore, the difference in traverse times on AV lane and normal lanes decreases after this point. For these two reasons, a maximum ratio of differences between lane-access control and non-lane access control appears at the saturation point.
5 Conclusion and Future Work
In this article we demonstrated the effect of assigning one lane on highways exclusively for AVs. We showed that for lower percentages of AVs, or more precisely, before the dedicated lane is saturated, travel times for AVs can be significantly shorter, while at the same time CVs are delayed due to the reduced capacity of the highway.
Looking at the entire road network, we observe that also non-highways are affected as CVs will effectively be drawn away from the highways onto the major roads. This effect is especially pronounced at early stages of AV adaptation where the AV lane will remain mostly empty. Regardless of an introduction of the AV lane, we confirmed earlier findings that a larger number of AVs will have a positive impact on travel times for all vehicles. We further compared the scenario with AV lane introduction to a baseline scenario where no changes to traffic regulations are made. The latter scenario outperforms the former one over the whole range of AV percentages, however, the difference is of considerable amount only before the saturation point is reached. We also showed to which extent lane access control can still provide faster travel times to specialized AVs and quantified the effect on vehicles without access to the dedicated lane.
Future work includes micro (and submicroscopic) studies to better understand the impact of smart platooning strategies but also turbulences caused by lateral vehicle movement. Another interesting research direction would be replacing the User Equilibrium (UE) traffic assignment with an algorithm that looks for system optimum assignment (e.g. BISOS [25]), in order to check whether an AV lane would be more beneficial in such cases.
References
Henderson, J., Spencer, J.: Autonomous vehicles and commercial real estate. Cornell R. Estate Rev. 141 (2016)
Litman, T.: Autonomous vehicle implementation predictions – implications for transport planning. Victoria Transport Policy Institute, Technical report, November 2016
Segata, M., Bloessl, B., Joerer, S., Dressler, F., Lo Cigno, R.: Supporting platooning maneuvers through IVC: an initial protocol analysis for the join maneuver. In: Conference on Wireless On demand Network Systems and Services (WONS 2014), Obergurgl, Austria, pp. 130–137. IEEE, April 2014
Ivanchev, J., Zehe, D., Nair, S., Knoll, A.: Fast identification of critical roads by neural networks using system optimum assignment information. In: International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, pp. 1–6. IEEE (2017)
Ivanchev, J., Aydt, H., Knoll, A.: Spatial and temporal analysis of mismatch between planned road infrastructure and traffic demand in large cities. In: International Conference on Intelligent Transportation Systems, Las Palmas, Spain, pp. 1463–1470. IEEE (2015)
Kanaris, A., Ioannou, P., Ho, F.S.: Spacing and capacity evaluations for different AHS concepts. In: Ioannou, P.A. (ed.) Automated Highway Systems, pp. 125–171. Springer, Boston (1997). https://doi.org/10.1007/978-1-4757-4573-3_8
Cohen, S., Princeton, J.: Impact of a dedicated lane on the capacity and the level of service of an urban motorway. Procedia Soc. Behav. Sci. 16, 196–206 (2011)
Carbaugh, J., Godbole, D.N., Sengupta, R.: Safety and capacity analysis of automated and manual highway systems. Transp. Res. Part C Emerg. Technol. 6(1), 69–99 (1998)
Tsao, H., Hall, R., Hongola, B.: Capacity of automated highway systems: effect of platooning and barriers. Institute of Transportation Studies, University of California, Berkeley, Technical report UCB-ITS-PRR-93-26, February 1994
Harwood, N., Reed, N.: Modelling the impact of platooning on motorway capacity. In: Road Transport Information and Control Conference 2014 (RTIC 2014), London, UK. IET (2014)
Michael, J.B., Godbole, D.N., Lygeros, J., Sengupta, R.: Capacity analysis of traffic flow over a single-lane automated highway system. J. Intell. Transp. Syst. 4(1–2), 49–80 (1998)
Hall, R., Chin, C.: Vehicle sorting for platoon formation: impacts on highway entry and throughput. Transp. Res. Part C Emerg. Technol. 13(5), 405–420 (2005)
Van Arem, B., Van Driel, C.J., Visser, R.: The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Trans. Intell. Transp. Syst. 7(4), 429–436 (2006)
Godbole, D.N., Lygeros, J.: Safety and throughput analysis of automated highway systems. Institute of Transportation Studies, University of California, Berkeley, Technical report UCB-ITS-PRR-2000-1, January 2000
Dresner, K.M., Stone, P.: Sharing the road: autonomous vehicles meet human drivers. In: Twentieth International Joint Conference on Artificial Intelligence (IJCAI 2007), vol. 7, Hyderabad, India, pp. 1263–1268, January 2007
Fakharian Qom, S., Xiao, Y., Hadi, M.: Evaluation of cooperative adaptive cruise control (CACC) vehicles on managed lanes utilizing macroscopic and mesoscopic simulation. In: 95th Annual Transportation Research Board Meeting, no. 16-6384, January 2016
Ghiasi, A., Hussain, O., Qian, Z.S., Li, X.: A mixed traffic capacity analysis and lane management model for connected automated vehicles: a Markov chain method. Transp. Res. Part B Methodol. 106, 266–292 (2017)
Ioannou, P.A., Chien, C.-C.: Autonomous intelligent cruise control. IEEE Trans. Veh. Technol. 42(4), 657–672 (1993)
Yokota, T., Ueda, S., Murata, S.: Evaluation of ahs effect on mean speed by static method. In: Fifth World Congress on Intelligent Transport Systems, Seoul, South Korea (1998)
Hussain, O., Ghiasi, A., Li, X., Qian, Z.: Freeway lane management approach in mixed traffic environment with connected autonomous vehicles. CoRR, vol. abs/1609.02946 (2016). http://arxiv.org/abs/1609.02946
Dafermos, S.C., Sparrow, F.T.: The traffic assignment problem for a general network. J. Res. Natl. Bur. Stand. Ser. B 73(2), 91–118 (1969)
Sindhwani, M., Xin, Q.K.: Singapore traffic information platform: enabling traffic-aware applications & systems. In: 17th ITS World Congress, Busan, South Korea, October 2010
Ivanchev, J., Litescu, S., Zehe, D., Lees, M., Aydt, H., Knoll, A.: Determining the most harmful roads in search for system optimal routing. TU Munich, Technical report TUM-I1632, February 2016
Fisk, C.: Some sevelopments in equilibrium traffic assignment. Transp. Res. Part B Methodol. 14(3), 243–255 (1980)
Ivanchev, J., Zehe, D., Viswanathan, V., Nair, S., Knoll, A.: BISOS: backwards incremental system optimum search algorithm for fast socially optimal traffic assignment. In: International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, pp. 2137–2142. IEEE (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Ivanchev, J., Knoll, A., Zehe, D., Nair, S., Eckhoff, D. (2019). A Macroscopic Study on Dedicated Highway Lanes for Autonomous Vehicles. In: Rodrigues, J., et al. Computational Science – ICCS 2019. ICCS 2019. Lecture Notes in Computer Science(), vol 11536. Springer, Cham. https://doi.org/10.1007/978-3-030-22734-0_38
Download citation
DOI: https://doi.org/10.1007/978-3-030-22734-0_38
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-22733-3
Online ISBN: 978-3-030-22734-0
eBook Packages: Computer ScienceComputer Science (R0)