
Abstract
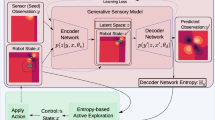
In order to explore and act autonomously in an environment, an agent can learn from the sensorimotor information that is captured while acting. By extracting the regularities in this sensorimotor stream, it can build a model of the world, which in turn can be used as a basis for action and exploration. It requires the acquisition of compact representations from possibly high dimensional raw observations. In this paper, we propose a model which integrates sensorimotor information over time, and project it in a sensory representation. It is trained by preforming sensorimotor prediction. We emphasize on a simple example the role of motor and memory for learning sensory representations.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Agrawal, P., Nair, A.V., Abbeel, P., Malik, J., Levine, S.: Learning to poke by poking: experiential learning of intuitive physics. In: Advances in Neural Information Processing Systems, pp. 5074–5082 (2016)
Friston, K.: The free-energy principle: a unified brain theory? Nat. Rev. Neurosci. 11(2), 127–138 (2010)
Ghahramani, Z., Wolpert, D.M., Jordan, M.I.: An internal model for sensorimotor integration. Science 269, 1880–1882 (1995). http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.57.74
Ha, D., Schmidhuber, J.: World models (2018). https://worldmodels.github.io
Harnad, S.: The symbol grounding problem (1990). http://cogprints.org/3106/
Hinton, G.E., Salakhutdinov, R.R.: Reducing the dimensionality of data with neural networks. Science 313(5786), 504–507 (2006)
Hotelling, H.: Analysis of a complex of statistical variables into principal components. J. Educ. Psychol. 24(6), 417 (1933)
Kingma, D.P., Ba, J.: Adam: a method for stochastic optimization. arXiv preprint arXiv:1412.6980 (2014)
Lesort, T., Díaz-Rodríguez, N., Goudou, J.F., Filliat, D.: State representation learning for control: an overview. ArXiv e-prints, February 2018
Lloyd, S.: Least squares quantization in PCM. IEEE Trans. Inf. Theory 28(2), 129–137 (1982)
Moser, M.B., Rowland, D.C., Moser, E.I.: Place cells, grid cells, and memory. Cold Spring Harb. Perspect. Biol. 7(2), a021808 (2015)
O’Regan, J.K., Noë, A.: A sensorimotor account of vision and visual consciousness. Behav. Brain Sci. 24(5), 939–973 (2001)
Radford, A., Metz, L., Chintala, S.: Unsupervised representation learning with deep convolutional generative adversarial networks. arXiv preprint arXiv:1511.06434 (2015)
Riedo, F., Rétornaz, P., Bergeron, L., Nyffeler, N., Mondada, F.: A two years informal learning experience using the Thymio robot. Adv. Auton. Mini Robot. 101, 37–48 (2012)
Stachenfeld, K.L., Botvinick, M.M., Gershman, S.J.: The hippocampus as a predictive map. Nat. Neurosci. 20(11), 1643–1653 (2017). https://doi.org/10.1038/nn.4650
Tenenbaum, J.B., De Silva, V., Langford, J.C.: A global geometric framework for nonlinear dimensionality reduction. Science 290(5500), 2319–2323 (2000)
Wayne, G., et al.: Unsupervised predictive memory in a goal-directed agent. CoRR abs/1803.10760 (2018). http://arxiv.org/abs/1803.10760
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Kulak, T., Ortiz, M.G. (2018). Emergence of Sensory Representations Using Prediction in Partially Observable Environments. In: Kůrková, V., Manolopoulos, Y., Hammer, B., Iliadis, L., Maglogiannis, I. (eds) Artificial Neural Networks and Machine Learning – ICANN 2018. ICANN 2018. Lecture Notes in Computer Science(), vol 11140. Springer, Cham. https://doi.org/10.1007/978-3-030-01421-6_47
Download citation
DOI: https://doi.org/10.1007/978-3-030-01421-6_47
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-01420-9
Online ISBN: 978-3-030-01421-6
eBook Packages: Computer ScienceComputer Science (R0)