
Abstract
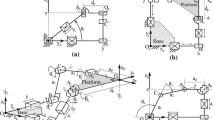
In this paper the methods of structural and dimensional synthesis of Cartesian manipulators of a class RoboMech reproducing the series of orthogonal trajectories are developed. The Cartesian manipulator of a class RoboMech is formed by connecting the output point to the base by three closing kinematic chains: one passive and two active ones. Parameters of synthesis of active closing kinematic chains are determined on the basis of the formulated problem of least-square approximation.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Waldron, K.J., Kinzel, G.L.: The relation between actuator geometry and mechanical efficiency in robots. In: Proceedings of the 4th CISM-IFToMM Symposium on Theory and Practics of Manipulators, Poland, pp. 366–374 (1981)
Song, S.M., Lee, J.K., Waldron, K.J.: Motion study of two – and three-dimensional panthograph mechanisms. Mech. Mach. Theory 22(4), 321–331 (1987)
Hunt, K.H.: Structural kinematics of in-parallel actuated robot-arms. Trans. ASME J. Mech. Transm. Autom. Des. 105, 705–712 (1983)
Smaili, A.A.: RoboMechs: a new class of linkage arms for multi-tash applications. Mech. Mach. Theory 30(2), 169–176 (1995)
Baigunchekov, Zh., et.al.: Parallel manipulator of a class RoboMech. Mechanism and Machine Science. In: Proceedings of ASIAN MMS 2016 & CCMMS 2016, pp. 547–557. Springer (2016)
Baigunchekov, Zh., et.al.: Synthesis of reconfigurable positioning parallel manipulator of a class RoboMech. In: Presented for the 4th IEEE/IFToMM International Conference on Reconfigurable Mechanisms & Robots, Delft, The Netherlands, 20–22 June 2018
Sobol, I.M., Statnikov, R.B.: Choosing the Optimal Parameters in Problems with Many Criterias. Moscow (1981). (in Russian)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Baigunchekov, Z., Ibrayev, S., Izmambetov, M., Baigunchekov, T., Naurushev, B., Mustafa, A. (2019). Synthesis of Cartesian Manipulator of a Class RoboMech. In: Gasparetto, A., Ceccarelli, M. (eds) Mechanism Design for Robotics. MEDER 2018. Mechanisms and Machine Science, vol 66. Springer, Cham. https://doi.org/10.1007/978-3-030-00365-4_9
Download citation
DOI: https://doi.org/10.1007/978-3-030-00365-4_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-00364-7
Online ISBN: 978-3-030-00365-4
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)