
Abstract
The initial information for the development of high-degree models of the Earth's gravitational field (EGF) are the results of satellite and ground-based measurements. At the same time, satellite measurements carry information on the long-wave structure of the EGF. Information on the short-wave structure of the EGF can be obtained only on the basis of ground-based measurements. Having organized the determination of deflection of vertical (DOV) with a resolution of several kilometers, the local structure of the EGF can be restored with the highest possible resolution. This can be done using digital zenith camera systems (DZCS). They are automated and allow to determine the components of the DOV at the point of placement in real time. The article presents the developed measurement technique with a DZCS and the results of its tests at various geographical points in the field. The proposed technique, unlike the existing traditional technique, allows to evaluate and take into account the calibration coefficients of the DZCS in each series of observations. In addition, the new proposed technique does not impose requirements on the accuracy of rotation of the telescope around the axis in the horizontal plane and the rigidity of the base of the DZCS. The test results of the new technique showed that the standard deviation of measurements is about 0.1″–0.3″.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Components of the DOV can be found in several ways:
-
1.
If the astronomical Φ, Λ and geodetic B, L coordinates of the location are known, the DOV components ξ, η are calculated as (Torge 2001):
This method is implemented in the traditional technique used in existing DZCS (Albayrak et al. 2019; Hirt et al. 2010; Tian et al. 2014; Somieski 2008).
-
2.
If the values of the components g x, g y of the gravity vector g are known, the components of the DOV are found by the following formulas (Brovar 1983):
A minus sign means that the DOV in the direction of increasing coordinates are considered negative.
Normalize the gravity vector g in the form:
where
With this in mind, formula (2) will take the form:
Thus, the task of determining the values of the DOV components is reduced to calculating the components of the normalized vector \( \hat{\mathbf{g}} \).
2 New Proposed Technique
The main components of DZCS are a telescope, a CCD camera, an inclinometer, a GNSS receiver and auxiliary equipment. Measurement data with DZCS in each position of the telescope are: a frame of the starry sky, geodetic coordinates of the location, exposure time of the frame of the starry sky, the current tilt of the telescope from the readings of an inclinometer and a temperature value that can be determined, for example, from the built-in temperature sensor in the inclinometer.
The unknown parameters of the DZCS are:
-
1.
Orientation angles φ, θ, ψ (Euler angles) between the inclinometer coordinate systems (CS) and the CCD camera CS. They can be determined using rotation matrices around the axes (Zharov 2006):
-
2.
The scale factors m x and m y and angle ε between the axes of the inclinometer. They can be calculated using a matrix of the form:
-
3.
Temperature coefficients k x and k y of the inclinometer axes. They can be determined if the temperature change ΔТ during the observation is known:
where k x, k y – temperature coefficients; \( {n}_x^{meas},{n}_y^{meas} \)– measured inclinometer readings without taking into account displacement due to temperature; T 0, T end – temperature in the first and last stationary position of the telescope in a single series; \( {n}_x^{\prime },{n}_y^{\prime}\kern0.5em \)– corrected inclinometer readings taking into account changes due to temperature.
-
4.
The components \( {\hat{g}}_x,{\hat{g}}_y \) of the normalized gravity vector \( \hat{\mathbf{g}} \).
-
5.
During measurements, the DZCS is placed at the measurement point freely, without orientation to the cardinal points. In this regard, it is necessary to determine the orientation matrix of the CCD sensor in the local CS (topocentric horizontal), in which the OZ axis is aligned with the normal to the ellipsoid, the OX axis is directed to the north, and the OY axis to the east. Denote this matrix A. Matrix A can be calculated on the basis of data on the sizes of the CCD sensor, the frame of the starry sky, the star catalog, exposure time, geodetic coordinates, polar motion parameters and the time corrections received from IERS bulletins (Murzabekov et al. 2018).
Based on the foregoing, the parameters of the DZCS are:
-
1.
measured and calculated:
-
(a)
CCD sensor orientation matrix in local CS, A;
-
(b)
measured inclinometer readings on two axes, \( {n}_x^{meas},{n}_y^{meas}; \)
-
(c)
temperature change during a single series, ΔT.
-
(a)
-
2.
unknown (10 parameters; the first eight are calibration coefficients):
-
(a)
orientation angles between the inclinometer CS and CCD camera, φ, θ, ψ;
-
(b)
scale factors and angle between the axes of the inclinometer, m x, m y, ε;
-
(c)
temperature coefficients of the inclinometer axes, k x, k y;
-
(d)
the components of the normalized gravity vector \( \hat{\mathbf{g}} \), \( {\hat{g}}_x,{\hat{g}}_y \).
-
(a)
Thus, the vector of unknowns of DZCS is as follows:
3 Model of the Proposed Technique
Multiply the normalized vector \( \hat{\mathbf{g}} \) by the matrix A, and then by the matrix R. This will allow to obtain the components of \( \hat{\mathbf{g}} \) in the inclinometer CS. In order take into account the inclinometer parameters, multiply by the matrix M and to take into account the shifts caused by changes in temperature, add term k ∙ ΔT. Based on this, the model of the new technique can be represented as follows:
where N – number of measurements (number of stationary positions of the telescope, N ≥ 10); \( {n}^{mod}={\left(\begin{array}{cc}{n}_x^{mod}& {n}_y^{mod}\end{array}\right)}^T \) – modeled inclinometer measurements along the axes OX and OY; M – matrix for estimating inclinometer parameters (6); R – rotation matrix from the CS of the CCD sensor to the CS of the inclinometer (5); A – CCD sensor orientation matrix in the local CS; \( \hat{\mathbf{g}} \) – normalized gravity vector in local CS (3); \( k={\left(\begin{array}{cc}{k}_x& {k}_y\end{array}\right)}^T \) – temperature coefficients of inclinometer axes; ΔТ – temperature change during a single series. To evaluate all unknown model parameters, after processing the measurement data in a single series, the objective function is formed:
where N – number of measurements; \( \Big({n}_x^{meas}\Big)_i,\Big({n}_y^{meas}\Big)_i \)– measured inclinometer readings in the i-th stationary position of the telescope, recounted in the projection of the normalized gravity vector (sines of the respective inclinometer reading angles). All unknown parameters are estimated by minimizing objective function (12). Nonlinear optimization starts with initial values:
Least squares optimization is performed using the Marquardt-Levenberg method with the numerical calculation of derivatives. At the same time, all parameters of the model are evaluated simultaneously, i.e. DZCS “auto-calibration” occurs in each series. After estimation \( {\hat{g}}_x,{\hat{g}}_y \), DOV components calculated with (4).
Thus, the new observation technique with the DZCS involves obtaining frames of the starry sky, the values of the inclinometer in a single series of measurements at different tilts of the telescope and temperature change during a single series. Measurements in each series can be performed in arbitrary directions of the optical axis of the telescope and at arbitrary angles in the horizontal plane and differ from series to series. The main requirement for applying the new technique is the rigidity of the telescope - CCD camera - inclinometer system. The accuracy of the rotary device and the rigidity of the horizontal plane of the DZCS's location do not affect the accuracy of the final values.
The algorithm of the new technique is presented in Fig. 1.

The algorithm of the new observation technique
The algorithm of the new technique includes three stages:
-
1.
Measurements: obtaining a frame of the starry sky, determining the exposure time, determining the current tilt of the telescope, measuring the temperature and determining the geodetic coordinates in each i-th stationary position of the telescope. Moreover, the star catalog, time corrections from IERS bulletins and polar motion parameters are known in advance.
-
2.
Data processing: finding stars in the image and determining the coordinates of their centers, identifying stars, determining transformation parameters and calculating the orientation matrix A for all frames of the starry sky.
-
3.
Calculation of DOV: estimation of the parameters of the measurement model in accordance with (12) and calculation of the values of the DOV components in accordance with (4).
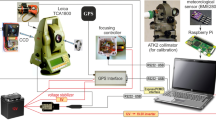
One the of ways to implement the new proposed technique is presented in Fig. 2.

An example of the implementation of a new measurement technique
In this case, the observation process with the new technique involves rotating the telescope, CCD camera and inclinometer around the vertical axis with a fixed number of steps in the horizontal plane twice: with the “initial” zenith angle ε 1 (first observation cycle) and with set zenith angle ε 2 (second observation cycle). The “initial” zenith angle is understood as the state of the initial alignment of the DZCS in the horizontal plane according to the readings of the inclinometer.
The advantages of the proposed technique, compared with the existing traditional technique, are:
-
1.
In each series of measurements, a simultaneous assessment and accounting of all the calibration coefficients of the DZCS is made, i.e. there is an “auto-calibration” of the device. This avoids additional errors caused by changes in calibration coefficients between series of measurements.
-
2.
Auto calibration process improves measurement efficiency.
-
3.
There are no requirements for the accuracy of rotation angles when rotating the device around an axis in the horizontal plane. This simplifies the design of the DCZS.
-
4.
The requirements for ensuring the rigidity of the base on which the telescope is located have been reduced. It is necessary to exclude any impact on the device during measurements in a single stationary position of the telescope (approximately 8–10 s). This allows to make observations on any solid foundation (dirt, asphalt roads and sites). This is especially important when measuring in the field.
4 Research of a New Technique
4.1 Research of Change of the Calibration Coefficients
Tests of the new measurement technique in the field were performed on a DZCS (Murzabekov 2017) at five various geographical points during 16 stellar observation nights. The average number of stars observed in the frame is about 100. At each point, at least six series of measurements were performed. According to the research results, it was found that the number of stationary positions of the telescope equal to 24 (12 positions for each rotation) is sufficient. Their further increase does not lead to an increase in accuracy.
In the traditional measurement technique, calibration coefficients determined before the start of measurements are used as constant values for observations. Studies have been conducted to evaluate changes in calibration coefficients between series and the effect of these changes on current values of DOV.
An example of the values of the calibration coefficients m x and m y (inclinometer scale factors) for each series and their change between the series during the observation at one point are presented in Fig. 3.

Values and changes of calibration coefficients m x and m y for each series during observations at one point
As can be seen from Fig. 3, there are a changes in the coefficients m x and m y. Consider how the change in the coefficients m x and m y between the series affects the DOV values for each series and the average values for all series. Figure 4 shows the changes in the calculated values of DOV depending on the series number (curves 1 and 2) and the change in calibration coefficients m x and m y (curves 3 and 4).

Difference ξ and η, calculated with and without evaluation of calibration coefficients and change of m x and m y
As can be seen from Fig. 4, there is a clear correlation between Δξ and Δη and the change in the coefficients m x and m y. In this case, the differences of single series can reach up to 0.4″, the average Δξ = 0.10″, and Δη = –0.01″.
Thus, an uncontrolled change in calibration coefficients leads to a shift in the values of DOV, i.e. to the appearance of an additional calculation error in DOV. This confirms the need to clarify the values of the calibration coefficients in each series during observations at each point.
4.2 Research of the Influence of the Choice of Methods for Processing Observational Data on the Accuracy of DOV
In the process of research of a new technique we reviewed:
-
three most used methods for determining the coordinates of the centers of stars: point spread function (PSF), method for approximation of the shape of a star with a paraboloid (MAP) and method of segment center determination (SCD);
-
four high precision star catalogs: Tycho-2, UCAC4, PPMXL, GAIA-DR2;
-
four transformation methods: affine and polynomial 2nd, 3rd and 4th degree.
The impact of the choice of processing method on the accuracy of the DOV is estimated. The total impact does not exceed 0.03″.
4.3 Measurement Model with an DZCS
A measurement model with an DZCS can be represented as follows:
where t UTC – exposure time of the frame of the starry sky in the Universal Coordination Time (UTC); xp, yp – current polar motion parameters. In accordance with the measurement model (13), the formulas for calculating the measurement error of the DOV components with an DZCS are written in the following form:
where K = 1.1 (with a confidence level of P = 0.95); с i – sensitivity coefficients for each component of the error (i = 1…11); m j – j-th component of the error (j = 1...9).
In more detail, the values of each error, sensitivity coefficients and calculation examples for several points are given in work (Murzabekov et al. 2021).
For example, for a point on the territory of FSUE VNIIFTRI, the errors of the DOV components according to formulas (14) are: m ξ = 0.36″, m η = 0.24″. Differences in errors are due to the dependence of the sensitivity coefficients for the DOV component in longitude on the latitude of the measurement point.
4.4 Test Results
The test results of the new technique are presented in Fig. 5.

Standard deviation for determining DOV at five geographical points during 16 observing starry nights
As can be seen from Fig. 5, the value of the standard deviation for determining components of DOV is in the range 0.1″–0.3″.
5 Summary and Conclusions
Thus, a new technique for performing observations with DZSC was developed. It provides the ability to “auto-calibrate” the parameters of the device during the measurement session in each series. In addition, the proposed measurement technique does not require the installation of a special hard measuring concrete base and precise rotation of the telescope around a vertical axis.
According to the results of testing the device in field conditions, the standard deviation was obtained in the range of 0.1″–0.3″, which is at the level of world analogues.
References
Albayrak M, Halicioğlu K, Özlüdemir MT, Başoğlu B, Deniz R, Tyler ARB, Aref MM (2019) The use of the automated digital zenith camera system in Istanbul for the determination of astrogeodetic vertical deflection. Bull Geod Sci 25(4):e2019025
Brovar VV (1983) Gravitational field in the tasks of engineering geodesy. M., Nedra, 112 pp. [in Russian]
Hirt C, Bürki B, Somieski A, Seeber G (2010) Modern determination of vertical deflections using digital zenith cameras. J Survey Eng 136:1–12
Murzabekov MM (2017) Astrometer of deviations of a plumb line of development of FSUE “VNIIFTRI”. Reports of the V Scientific and Practical Conference of Young Scientists, Graduate Students and Specialists “Metrology in the XXI Century”, March 23, 2017 FSUE VNIIFTRI, pp 152–156 [in Russian]
Murzabekov MM, Fateev VF, Pruglo AV et al (2018) Astron Rep 62:1013. https://doi.org/10.1134/S1063772918120107
Murzabekov MM, Bobrov DS, Davlatov RA, Lopatin VP, Pchelin IN (2021) Results of comparing astronomical-geodetic and navigational-geodetic methods of determining the components of the deflection of vertical. Geod Cartogr 82(9):2–10. (In Russian). https://doi.org/10.22389/0016-7126-2021-975-9-2-10
Somieski A (2008) Astrogeodetic geoid and isostatic considerations in the North Aegean Sea, Greece. A dissertation submitted to the ETH Zurich for the degree of Doctor of Sciences
Tfian L, Guo J, Han Y, Xiushan L, Liu W, Wang Z, Wang B, Yin Z, Wang H (2014) Digital zenith telescope prototype of China. Chin Sci Bull 59(17):1978–1983. https://doi.org/10.1007/s11434-014-0256-z
Torge W (2001) Geodesy, 3rd comp. rev. and. Ext. ed. Walter de Gruyter, Berlin
Zharov VE (2006) Spherical Astronomy. Vek-2, Fryazino [in Russian]
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 The Author(s)
About this paper

Cite this paper
Murzabekov, M., Fateev, V., Pruglo, A., Ravdin, S. (2022). Results of Astro-Measurements of the Deflection of Vertical Using the New Observation Technique. In: Freymueller, J.T., Sánchez, L. (eds) 5th Symposium on Terrestrial Gravimetry: Static and Mobile Measurements (TG-SMM 2019). International Association of Geodesy Symposia, vol 153. Springer, Cham. https://doi.org/10.1007/1345_2021_136
Download citation
DOI: https://doi.org/10.1007/1345_2021_136
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-25901-2
Online ISBN: 978-3-031-25902-9
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)