
Abstract
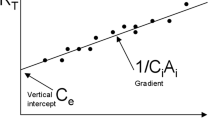
The determination of defect depth and size using Pulsed Infrared Thermography is a critical problem. The problem of defect depth estimation has been previously studied using 1D heat conduction models. Unfortunately, 1D heat conduction based models are generally inadequate in predicting heat flow around defects. In this study, a novel approach based on virtual heat sources is proposed to model heat flow around defects accounting for 2D axisymmetric heat conduction. The proposed approach is used to quantitatively determine the defect depth and size. The validity of the model is established using experiments performed on a stainless steel plate specimen with flat bottom holes at different depths.













Similar content being viewed by others

References
Shepard SM (2001) Advances in pulsed thermography. Thermosense XXIII 4360(1):511–515
Shepard SM, Lhota JR, Rubadeux BA, Wang D, Ahmed T (2003) Reconstruction and enhancement of active thermographic image sequences. Opt Eng 42(5):1337–1342
Sun JG (2006) Analysis of pulsed thermography methods for defect depth prediction. J Heat Transfer 128(4):329–338
Ibarra-Castanedo C, Genest M, Servais P, Maldague XPV, Bendada A (2007) Qualitative and quantitative assessment of aerospace structures by pulsed thermography. Nondestr Test Eval 22(2–3):199–215
Manohar A, Lanza di Scalea F (2011) Wavelet-aided multivariate outlier analysis to enhance defect contrast in thermal images. Exp Tech. doi:10.1111/j.1747-1567.2011.00771.x
Maldague X (ed) (1994) Infrared methodology and technology, vol 7. Gordon and Breach Science
Ringermacher HI, Archacki Jr RJ (1998) Nondestructive testing: transient depth thermography. US Patent 5711603
Parker WJ, Jenkins RJ, Butler CP, Abbott GL (1961) Flash method of determining thermal diffusivity, heat capacity and thermal conductivity. J Appl Phys 32(9):1679–1684
Carslaw H, Jaeger J (1959) Conduction of heat in solids. Oxford Science Publications, Clarendon Press
Acknowledgements
The authors would like to thank the National Science Foundation (Grant #1028365) and the von Liebig Center at the University of California, San Diego for funding the project through a Department of Energy fellowship.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Solution of T 1(r,t)
Let T 1(r,t) = k 1(r)k 2(t). Then from equation (7),
The above equation can be written as,
By letting both sides of the equation equal to the constant, − μ 2, we have
and
Solving by standard methods yields, \(k_2(t)=c_1 e^{-t\alpha\mu^2}\) and k 1(r) = c 2 J 0(r μ) + c 3 Y 0(r μ). J 0 is the Bessel’s function of the first kind with order 0 and Y 0 is the Bessel’s function of the second kind with order 0. c 1, c 2, c 3 and μ are constants that need to determined based on the prescribed initial and boundary conditions in the radial direction. It should be noted that Y 0, the Bessel’s function of the second kind at order 0, is unbounded at r = 0. For boundedness of the solution, c 3 = 0. No flux condition at r = R implies, \(\frac{\partial T}{\partial r}=0\), and hence \(\frac{\partial k_1}{\partial r}=0\). This implies − μc 2 J 1(r μ) = 0 as \(\frac{\partial J_0(\mu r)}{\partial r}=-\mu J_1(\mu r)\). For non-trivial solutions, J 1(μR) = 0. Using standard tables for roots of Bessel functions, the roots of the function are 3.83, 7.01, 10.17 .... Thus, T 1(r,t) can be written as the product of k 1(r) and k 2(t).
where \(\mu \in \left\{ \frac{3.83}{R}, \frac{7.01}{R}, \frac{10.17}{R} \ldots \right\}\). By letting c 1 c 2 = A, a constant, and by using principle of superposition of the solutions, we have,
A n are a series of multiplicative constants that need to determined by using the initial conditions and properties of Bessel’s functions. At t = 0,
If μ n and μ m are roots of J 0′(μR) = 0, it follows that [9],
Multiplying both sides of equation (22) by r J 0(μ n r) dr and integrating between the limits 0 to R, we have,
On further simplifying using equation (23),
The radial part of the solution can be written as,
where \(\mu_n \in \left\{\frac{3.83}{R}, \frac{7.01}{R},\frac{10.17}{R} \ldots \right\}\). For solution completeness, a constant first term analogous to the Fourier series has to be added to the expansion [9]. The constant first term would be \(\frac{2}{R^2}\int_0^R \zeta f(\zeta) \,d\zeta\) which reduces to \(\frac{2}{R^2}\int_0^a \zeta T_v \,d\zeta\) for the given set of boundary and initial conditions. Thus, the constant first term equals \(T_v\frac{a^2}{R^2}\). The radial part of the solution with the added constant term can be finally written as,
Solution of T 2(z,t)
By letting T 2(z,t) = k 3(z)k 4(t). Equation (9) simplifies to,
By letting both sides of the equation equal to the constant, − λ 2, and rearranging, we have,
and
Solving equations (29) and (30) yields, k 3(z) = c 5cos(λz) + c 6sin(λz) and \(k_4(t)=c_4 e^{-t\alpha\lambda^2}\) and by using the boundary conditions in the z direction, we have \(\frac{\partial k_3}{\partial z}=0\) at z = 0 and z = d.
\(\frac{\partial k_3}{\partial z}=0\) at z = 0 implies c 6 = 0, and \(\frac{\partial k_3}{\partial z}=0\) at z = d implies − c 5 λsin(λd) = 0. For non-trivial solutions, sin(λd) = 0 which implies, \(\lambda=\frac{m\pi}{d}\) for m = 1, 2, 3, .... Thus,
The resulting solution of the partial differential equation in the z direction is a product of k 3(z) and k 4(t),
where B = c 4 c 5 is an arbitrary multiplicative constant. By principle of superimposition, the above equation can be written as
The series of constants, B m will be determined using the initial condition in the z direction.
By using,
Thus, B 0 = 1 and B m = 2 for all m ≥ 1. The solution in the z direction can be written as,
Rights and permissions
About this article
Cite this article
Manohar, A., Lanza di Scalea, F. Determination of Defect Depth and Size Using Virtual Heat Sources in Pulsed Infrared Thermography. Exp Mech 53, 661–671 (2013). https://doi.org/10.1007/s11340-012-9670-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11340-012-9670-9