
Abstract
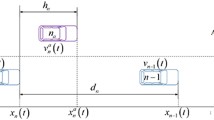
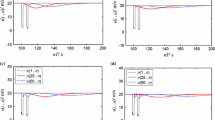
In order to describe the car-following behavior more actually in real traffic, an extended car-following model incorporating the headway of arbitrary number of vehicles that precede and the relative velocity is proposed from the viewpoint of control. The stability condition of the extended model is obtained by using the linear stability theory. The modified control signal will play an effect only if the traffic is in congested state. The numerical simulations and results are in accordance with our theoretical analysis.




Similar content being viewed by others

References
Tang TQ, Li CY, Huang HJ, Shang HY (2012) A new fundamental diagram theory with the individual difference of the drivers perception ability. Nonlinear Dyn 67:2255–2265
Li YF, Sun DH, Liu WN, Zhang M, Zhao M, Liao XY, Tang L (2011) Modeling and simulation for microscopic traffic flow based on multiple headway, velocity and acceleration difference. Nonlinear Dyn 66:15–28
Bando M, Hasebe K, Nakayama A, Shibata A, Sugiyama Y (1995) Dynamical model of traffic congestion and numerical simulation. Phys Rev E 51:1035–1042
Helbing D, Tilch B (1998) Generalized force model of traffic dynamics. Phys Rev E 58:133–138
Jiang R, Wu QS, Zhu ZJ (2001) Full velocity difference model for a car-following theory. Phys Rev E 64:017101-1–017101-4
Ge HX, Cheng RJ, Li ZP (2008) Two velocity difference model for a car following theory. Physica A 387:5239–5245
Konishi KJ, Kokame H, Hirata K (1998) Decentralized delayed-feedback control of a coupled map model for open flow. Phys Rev E 58:3055–3059
Zhao XM, Gao ZY (2007) The stability analysis of the full velocity and acceleration velocity model. Physica A 375:679–686
Han XL, Jiang CY, Ge HX, Dai SQ (2007) A modified coupled map car-following model based on application of intelligent transportation system and control of traffic congestion. Acta Phys Sin 56:4383–4392 (in Chinese)
Shen FY, Zhang H, Ge HX, Yu HM, Lei L (2009) A control method for congested traffic in the coupled map car-following model. Chin Phys B 18:4208–4216
Yu HM, Cheng RJ, Ge HX (2010) Consider backward effect in coupled map car-following model. Commun Theor Phys 54:117–122
Ge HX, Cheng RJ, Li ZP (2011) Considering two-velocity difference effect for coupled map car-following model. Acta Phys Sin 60:080508
Ge HX, Yu J, Lo SM (2012) A control method for congested traffic in the car-following model. Chin Phys B 29:050502
Ge HX, Meng XP, Ma J, Lo SM (2012) An improved car-following model considering influence of other factors on traffic jam. Phys Lett A 377:9–12
Ge HX, Dai SQ, Dong LY, Xue Y (2004) Stabilization effect of traffic flow in an extended car-following model based on an intelligent transportation system application. Phys Rev E 70:066134
Acknowledgments
Project supported by the National Natural Science Foundation of China (Grant Nos. 11262003 and 11372166, 11302125), Shanghai Science and Technology Commission (No.12PJ1404000), the Scientific Research Fund of Zhejiang Provincial, China (Grant No. LY13A010005) and the K.C. Wong Magna Fund in Ningbo University, China.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Bao, J., Cui, Y., He, Hd. et al. A modified control method for congested traffic in car-following model. Int. J. Dynam. Control 3, 457–462 (2015). https://doi.org/10.1007/s40435-014-0097-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-014-0097-2