
Abstract
Selecting suitable stiffness for shock isolation system is conventional design mode; there is a bug in this design mode: high shock isolation efficiency always results in large relative displacement. A more feasible design mode is proposed based on the optimal control force: at the beginning of shock response, the relative displacement is small and relative velocity is high, control force should be offered by damping mostly; when the relative velocity become low and relative displacement become large, control force should be offered by spring mostly. The critical initial velocity is decided by limiting performance analysis. In that condition, the optimal control force can be realized by passive device if the function of force–relative displacement and force–relative velocity comply with some rule. The higher shock isolation efficiency and the smaller relative displacement will be achieved at the same time. An optimal shock isolation system is constructed based on quadratic damping and linear stiffness, and that is proved theoretically. The optimal model is calculated by Runge–Kutta method, and the significant conclusion is obtained: comparing with conventional shock isolation system, the optimal system that is designed with the new mode can get more excellent shock isolation performance.
Similar content being viewed by others


1 Introduction
It’s very important to design shock isolator for important equipment in harsh shock environment [1]. Conventional design mode of shock isolator is based on such an idea in Ref. [2]: the transient and hard loading is stored in the shock isolator, and then the stored energy is gradually dissipated during free vibration. Usually, the natural frequency of the system is low, and hence high shock isolation efficiency results in large relative displacement. Though displacement restrictor in Refs. [3, 4] is introduced in order to limit the relative displacement, which reduces the low shock isolation efficiency. To solve this problem, the Ruzicka isolator is studied based on the law of conservation of energy in Ref. [5], and the results show that the Ruzicka isolator has superior performance than the conventional design. In order to control the low frequency shock, the magnetorheological damper is applied to the shock isolation system, the simulation results indicate that it can isolate successive shocks in war-ship environment, and the displacement and acceleration of the equipment can both be restricted [6]. A semi-active shock isolation technology based on controllable damping is put forward in Ref. [7] to solve the problem that the shock isolation system must offer high isolation efficiency and small relative displacement at the same time when it is suffered from a shock with short duration, to assure the performance of vibration isolation the semi-active shock isolation system works in minimum damping when it is apart from the shock action. When the shock is acting on the system, a two-parts semi-active control strategy is applied to control the system by using as big damping ratio as possible to reduce the relative displacement under the condition that the shock isolation efficiency is ensured. The genetic algorithm and the nonlinear programming methods are introduced in Refs. [8, 9] to make the isolation system’s performance reach limit. Jiang reviews the development of shock isolation from two aspects including critical analytical approach and experimental methods [10]. As the shock isolation requirement is improved continuously, the conventional shock isolation design is gradually lagged behind the development of the times.
To improve the performance of shock isolator, a new design method is considered. Some key factors that are ignored in conventional design are discussed in what follows, which is rather most important to ensure the performances of the shock isolator:
-
(1)
Optimal control force was believed not feasible for engineering implementation in conventional design. The optimal control force was proposed a long time ago in Ref. [11], but many scholars believe that it’s too idealistic to be implemented for passive shock isolator. But we believe that the optimal control force can be achieved with the passive shock isolator in some condition, which is discussed in this work.
-
(2)
The conventional design method failed to consider the critical initial velocity. The limiting performance of shock isolation system is studied by literatures [11–17], where the critical initial velocity is derived. Usually, the critical initial velocity is ignored by engineers, but it is really an important factor for optimal control force.
-
(3)
The importance of damping is ignored in the conventional design. When mechanical systems are subject to transient loading, the duration of the disturbance is very short. Many scholars believe that damping can absorb little energy in the process of shock isolation, so non-damped shock isolation model is studied by many scholars [4]. But in recent years, some literatures showed the damping effect for shock isolation [18–21]. The importance of damping for optimal control force is also proved in this work.
Shock isolation design method is re-examined here, the relationship between shock isolation criterion and critical initial velocity is studied, and an optimal shock isolation model based on the optimal control force is proposed. This work is concerned with designing an optimal passive shock isolator which has much more excellent performance than the conventional shock isolator.
The outline of the paper is as follows: in Sect. 2, the optimal control force and the possibility of engineering implementation are discussed. In Sect. 3, limiting performance analysis is introduced, and the relationship between optimal control force and critical initial velocity is discussed. In Sect. 4, limiting performance analysis shows that the performance of optimal shock isolator is much more excellent than that of conventional shock isolator. In Sect. 5, an optimal shock isolation model is built, and the parameters of system are obtained. The relationship between hydraulic damper and quadratic damping is discussed, which could be a key for engineering implementation. In Sect. 6, three shock isolation models are calculated with the Runge–Kutta method, and the performance is compared. The seventh section contains some concluding remarks.
2 Optimal control force and the possibility of engineering implementation
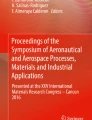
A single-degree-of-freedom shock isolation system is shown in Fig. 1. The differential equation of motion of the shock isolation system and its initial conditions are shown in Eq. (1):
where \(x\) represents the displacement of the object relative to the base, the dots denote derivatives with respect to time \(t, u(x,\dot{x})\) denotes the control force acting on the mass \(m\), and \(v_0\) denotes the initial velocity of base.

The optimal shock isolation model
The maximum absolute acceleration of the isolated object is dependent on the control force \(u(x,\dot{x})\) and the rigid mass \(m\). If the control force is a constant \(u\) (as Fig. 1b shows), we can get the acceleration \(\ddot{x}(t)=u/m\). When \(\ddot{x}(t)=A+\varepsilon (\varepsilon <0,\varepsilon \rightarrow 0)\), where \(A\) denotes the allowable peak acceleration of the object, the relative displacement can be minimized under the condition that the safety of object is ensured. The constant force \(u\) is called the optimal control force.
Usually, engineers believe that the optimal control force cannot be realized in engineering implementation. But it can really be realized in consideration of the variables \(x\) and \(\dot{x}\) time history (as shown in Fig. 1c, d):
-
(1)
In the initial stage of shock response, the relative velocity is high and the relative displacement is small. If the damping is introduced, the optimal control force can be gained at the beginning;
-
(2)
In the intermediate stage of shock response, the relative velocity comes down and the relative displacement increases, the optimal control force can be shared by the damping force and the spring’s elastic force;
-
(3)
When the shock response near the end, the relative displacement is close to the maximum value. At this time, the optimal control force can be provided by the spring.
Obviously, it is possible to keep the control force as a constant as long as the functions of the force versus velocity and the force versus displacement comply with some rule. But it should be noted that the optimal control force is initial velocity dependent. Hence, it is impossible to realize optimal control force under all circumstances.
3 Limiting performance analysis and critical initial velocity
Two criteria are often used in practice to specify the performance of the shock isolator:
-
(1)
The maximum absolute acceleration: \(J_1\);
-
(2)
The maximum relative displacement: \(J_2\);
The differential equation of motion of the one-degree-of-freedom system is
where \(m, x, \dot{x}, \ddot{x}\) and \(\ddot{y}\) denote the rigid mass, the relative displacement, the relative velocity, the relative acceleration and the absolute acceleration of the base, respectively. The shock frequency is usually much higher than the natural frequency of the system, so Eq. (2) can be transformed into the following equation
with initial conditions \(x(0)=0\), and \(\dot{x}(0)={v_{0}}\).
The relationship between the shock isolation performance criteria \(J_1, J_2\) and the initial velocity \({v_{0}}\) is [11]:
According to the Cauchy formula, Eq. (3) can be transformed into the following integral equation:
Using reduction to absurdity: if \(J_1 J_2 <\frac{1}{2}v_0^2 \) is valid, Eq. (6) is given by substituting \(J_1 =\max \left( \frac{u(x,\dot{x})}{m}\right) \) to Eq. (5)
So \(J_2 =\max (x(t))>\max [v_0 t-\frac{v_0^2 }{4J_2 }t^{2}]=J_2\), but this inequation is not valid.
So \(J_1 J_2 =\frac{1}{2}v_0^2 \) is the limiting performance of the shock isolation system, and no shock isolator can exceed this limit.
Based on the above theorem, another conclusion can be obtained: \(V_0 =\sqrt{2AD}\) is defined as the critical initial velocity (A and D denote the allowable peak absolute acceleration and relative displacement of the isolated object). Once the initial velocity oversteps \(V_0 \), it is impossible to achieve \(J_1 \le A\) and \(J_2 \le D\) simultaneously.
There may be an optimal shock isolator which can generate the optimal control force \(u=mA\) when the initial velocity is equal to the critical initial velocity. Then it is gained that \(J_1 <D\) and \(J_2 =D\), which just meet the shock isolation requirements. If the initial velocity is lower than the critical initial velocity, then \(J_1 <A,J_1 <D\). This kind of isolator is called the optimal shock isolator. The optimal shock isolation system is based on this idea.
4 Limiting performance comparison of several shock isolators
The performances of different shock isolators are studied with the limiting performance analysis in this section. And the limiting performance of the optimal shock isolator is compared with that of the conventional ones. The greatly superiority of optimal isolator would be shown in following.
4.1 Limiting performance analysis of the optimal shock isolator
The optimal shock isolation model with given A and D is shown in Fig. 1a. The critical initial velocity of the system is \(V_0 =\sqrt{2AD}\). The optimal control force generated by the isolator is \(u=mA\) when the critical initial velocity is applied. According to the initial condition, the expressions of \(x(t), \dot{x}(t), \ddot{x}(t)\) are
where \(t\in \left[ {0,t_m } \right] , t_m ={V_0 }/A\), which means that this process occurs from the beginning until the relative velocity reduce to zero for the first time (we call it the first stage of the shock response). The maximum absolute acceleration and maximum relative displacement can be calculated: \(J_1 =A, J_2 =\frac{V_0^2 }{2A}\). Obviously, \(J_1 J_2 =\frac{1}{2}V_0^2\). It means that the optimal shock isolation system can bear the critical loading. If the isolator is a passive device, based on energy conservation theorem, the system can bear the loading when the initial velocity is lower than the critical value.
4.2 Limiting performance analysis of conventional shock isolators
-
(1)
Linear shock isolator The shock isolation system with displacement restrictor is shown in Fig. 2. Let \(k_a =0\), it becomes a linear shock isolation system. The maximum absolute acceleration and the relative displacement of the linear shock isolation can be obtained with the initial velocity method and the energy conservation theorem.
$$\begin{aligned} a_{m0} ={v_0 }/{\sqrt{m/k}}\quad x_{m0} =v_0 \sqrt{m/k} \end{aligned}$$(8)Obviously
$$\begin{aligned} J_1 J_2 =v_0^2 \end{aligned}$$(9)Compared to the result of Sect. 4.1, the shock loading that the optimal shock isolator can bear is 40 % more than that the linear shock isolator can bear.
-
(2)
Shock isolator with displacement restrictor [3]. The shock isolation model is shown in Fig. 2, where \(U_{0}\) is the working clearance. The following analysis considers the displacement restrictor’s effect, but the damping and energy loss are not considered. Let \(x_{m}\) denotes the maximum relative displacement, and Eq. (10) can be obtained with the energy conservation theorem:
$$\begin{aligned} \frac{1}{2}mv_0^2 =\frac{1}{2}kx_m^2 +\frac{1}{2}k_a \left( {x_m -U_0 } \right) ^{2}. \end{aligned}$$(10)Then the maximum relative displacement \(x_m\) and the maximum acceleration \(a_m \) are obtained.
$$\begin{aligned} x_m&= \frac{k_a U_0 +\sqrt{kmv_0^2 -kk_a U_0^2 +k_a mv_0^2 }}{k+k_a } \nonumber \\ a_m&= \frac{kx_m +k_a (x_m -U_0 )}{m}. \end{aligned}$$(11)
The non-dimentionalized form is gained by setting \(\alpha ={k_a }/k, \beta ={U_0 }/{x_{m0} }, AA={a_m }/{a_{m0} },DD={x_m }/{x_{m0} }\). Substituting Eq. (12) into Eq. (11), get
Combine Eqs. (8) and (12), and get
Set \(\alpha \in \left[ {0,100} \right] \), \(\beta \in \left[ {0,1} \right] \), and then curves of the limiting performance are gained as shown in Fig. 3.

Linear shock isolation system with displacement restrictor

Curve of limiting performance of linear shock isolator with displacement restrictor
Figure 3 tells that the displacement restrictor reduces the relative displacement, however that the limiting performance of the shock isolation system is affected negatively, which means lower shock isolation efficiency.
5 The optimal shock isolations system based on optimal control force
The control force \(u\left( {\dot{x},x} \right) \) is generated by damper and spring:
where \(G\left( {\dot{x}} \right) \) and \(F\left( x \right) \) denotes the function of force–relative velocity and force–relative displacement respectively. The control force should be a constant \((u\left( {\dot{x},x} \right) =mA)\) when the critical velocity is applied. There are two methods to achieve the design: (1) given \(G\left( {\dot{x}} \right) \), designing \(F\left( x \right) \); (2) given \(F\left( x \right) \), designing \(G\left( {\dot{x}} \right) \). An optimal model based on the first method is studied in Sect. 5.1.
5.1 Selecting quadratic damping, designing \(F\left( x \right) \)
A fact that the maximum acceleration and displacement always occurs at the first stage of the impulse response can be obtained by a number of experiments and simulations. The first stage is the period during which the object motion is from static to the first zero speed. In order to simplify the calculation process, assuming that the first phase of the impulse response objects moving in positive direction, the formulation \(\dot{x}\left| {\dot{x}} \right| =\dot{x}^{2}\) can be obtained.
\(c_q \dot{x}\left| {\dot{x}} \right| \)is selected as \(G\left( {\dot{x}} \right) \), the shock isolation system can be described by the following form:
where \(V_0\) is the critical initial velocity, and just the first stage of shock response is analyzed. Eq. (16) can be given as following form:
Obviously, \(c_q V_0^2 =mA,\;\ddot{x}=A\), Eq. (17) can be obtained by substituting them to Eq. (16) and combining Eq. (7):
The result shows: the shock isolator with linear stiffness and quadratic damping would meet the optimal design. It would generate the optimal control force when the critical velocity is applied. The optimal shock isolation system and parameters are shown in Eq. (18).
5.2 Quadratic damping and hydraulic damper
Hydraulic damper model is shown in Fig. 4, usually it is consisting of cylinder, perforated piston, fluid, and piston rod [22]:

Model of hydraulic damper
where \(\dot{x}\) denotes the relative velocity, \(a\) denotes the area of the hole, \(A_p\) denotes the rest area on the piston, \(\rho \) denotes the density of fluid and \(\xi \) denotes the resistance coefficient which is fluid and hole property dependent. The relationship between resistance and the relative velocity is described in Eq. (19):
Both of linear stiffness and quadratic damping can be implemented in engineering, so the optimal shock isolation model (Eq. 18) is significant for engineering implementation.
6 Simulation and analysis
For a numerical example, choose the values for the performance criteria: the allowable peak acceleration \(A=20\) g, the allowable peak relative displacement \(D=20\) mm. Three types of shock isolation model are compared with a base input in the form of an acceleration pulse of half sine shape:
-
(1)
Type 1: linear shock isolation system
$$\begin{aligned} m\ddot{x}+c\dot{x}+kx=-m\ddot{u}. \end{aligned}$$(20)Non-dimentionalized form is applied, and Eq. (21) can be obtained:
$$\begin{aligned} \ddot{x}+2\xi \omega _n \dot{x}+\omega _n^2 x=-\ddot{u}, \end{aligned}$$(21)where \(\ddot{u}=\left\{ {\begin{array}{ll} X\sin \left( {\omega _s t} \right) &{}\quad \left( {t\le t_s } \right) \\ 0 &{}\quad \left( {t>t_s } \right) \\ \end{array}} \right. , X\) is the peak acceleration of base, \(\omega _s\) is the shock frequency, \(t_s\) is the duration of shock. Without loss of generality, there is always some damping in actual system, the damping factor is taken as \(\xi =0.05\), the natural frequency of system is taken as \(\omega _n =62.8\) rad/s.
-
(2)
Type 2: linear shock isolation system with displacement restrictor If the displacement restrictor is introduced to type 1, the differential equations can be described by Eq. (22):
$$\begin{aligned} \left\{ {\begin{array}{ll} m\ddot{x}+c\dot{x}+kx=-m\ddot{u} &{}\quad \left( {\left| x \right| <U_0 } \right) \\ m\ddot{x}+c\dot{x}+kx+k_a \left( {x-U_0 } \right) =-m\ddot{u} &{}\quad \!\left( {x\ge U_0 } \right) \\ m\ddot{x}+c\dot{x}+kx+k_a \left( {x+U_0 } \right) =-m\ddot{u} &{}\quad \!\left( {x\le -U_0 } \right) \\ \end{array}} \right. \nonumber \\ \end{aligned}$$(22)where \(k_a\) is the stiffness of displacement restrictor, \(U_0 \) is the working clearance, set \(k_a =3k\) and \(U_0 =\frac{1}{4}D\). Non-dimentionalized form is applied, and Eq. (23) can be obtained:
$$\begin{aligned} \left\{ {\begin{array}{ll} \ddot{x}\!+\!2\xi \omega _n \dot{x}\!+\!\omega _n^2 x\!=\!-\ddot{u} &{}\quad \!\left( {\left| x \right| \!<\!U_0 } \right) \\ \ddot{x}\!+\!2\xi \omega _n \dot{x}\!+\!\omega _n^2 x\!+\!3\omega _n^2 \left( {x-U_0 } \right) \!=\!-\ddot{u} &{}\quad \!\left( {x\!\ge \! U_0 } \right) \\ \ddot{x}\!+\!2\xi \omega _n \dot{x}\!+\!\omega _n^2 x\!+\!3\omega _n^2 \left( {x\!+\!U_0 } \right) \!=\!-\ddot{u} &{}\quad \!\left( {x\!\le \! -U_0 } \right) \end{array}} \right. \nonumber \\ \end{aligned}$$(23) -
(3)
Type 3: the optimal shock isolation system The optimal shock isolation model can be described in Eq. (24) according to Sect. 5.1
$$\begin{aligned} \ddot{x}+\frac{1}{2D}\dot{x}\left| {\dot{x}} \right| +\frac{A}{D}x=-\ddot{u}. \end{aligned}$$(24)Parameters are given by substituting A and D to Eq. (24):
$$\begin{aligned} \ddot{x}+25\dot{x}\left| {\dot{x}} \right| +99^{2}x=-\ddot{u}. \end{aligned}$$(25)
6.1 Shock isolation performance comparison under high frequency ratio
The duration of shock is considered as \(t_{s}=2\) ms, define \(\omega _{s}/\omega _{n}\) as the frequency ratio. So the frequency ratio is 16 for optimal shock isolation system (high frequency ratio). Choose four values for the peak acceleration of base: X \(=\) 100, 180, 210 and 300 g. The comparison of three types shock isolation performance is shown in Figs. 5, 6, 7 and 8.

Time history of acceleration and relative displacement for X \(=\) 100 g

Time history of acceleration and relative displacement for X \(=\) 180 g

Time history of acceleration and relative displacement for X \(=\) 210 g. a Time–history curves. b Amplificatory acceleration curve. c Amplificatory relative displacement curve

Time history of acceleration and relative displacement for X \(=\) 300 g
Figure 5 shows that only type1 and typ3 meet the requirement when X \(=\) 100 g. Though the peak relative displacement of type 2 is smaller than that of type 1 and type 3, the peak acceleration oversteps limit, which consistent with the theoretical analysis in Sect. 3.
Figure 6 shows when X \(=\) 180 g, peak acceleration of type 2 and peak relative displacement of type 1 overstep the limit, but performance of type 3 is excellent.
Figure 7 shows when \(\hbox {X}=210\) g, the equivalent initial velocity is close to critical initial velocity, the optimal control force seems to work. The peak acceleration and peak relative displacement of type 3 still doesn’t overstep the limit, that is shown in Fig. 7b.
When X \(=\) 300 g, the equivalent initial velocity is 3.74 m/s, which is much higher than the critical initial velocity (the critical initial velocity is \(V_0 =\sqrt{2AD}=2.8\) m/s). The comparison of three types shock isolation performance is shown in Fig. 8. Under this condition, no shock isolation system would meet the requirement, which is consistent with the analysis in Sect. 3.
The optimal shock isolation model is deduced based on initial velocity method. When the frequency ratio is high, the optimal model is valid, and the advantage of the optimal shock isolation system is obvious.
6.2 Shock isolation performance comparison under low frequency ratio
When frequency ratio is lower than 10, the initial velocity method would be invalidated. Whether the performance of optimal shock isolation system would be still excellent under this condition? That need more investigation, but something can be shown in the following simulation.
The duration of shock is considered as \(t_{s}=6\) ms, so the frequency ratio is 5.3 for optimal shock isolation system (low frequency ratio). Choose three values for the peak acceleration of base: X \(=\) 50, 70 and 73 g. The comparison of three types shock isolation performance is shown in Figs. 9, 10 and 11.

Time history of acceleration and relative displacement for X \(=\) 50 g

Time history of acceleration and relative displacement for X \(=\) 70 g. a Time–history curves. b Amplificatory acceleration curve. c Amplificatory relative displacement curve

Time history of acceleration and relative displacement for X \(=\) 73 g. a Time–history curves. b Amplificatory acceleration curve. c Amplificatory relative displacement curve
Figure 9 shows when X \(=\) 50 g, the peak acceleration of type 2 and peak relative displacement of type 1 both overstep the limit, just the performance of type 3 meet the requirement.
Figure 10 shows when X \(=\) 70 g, the peak acceleration and peak relative displacement of type 3 still doesn’t overstep the limit, the optimal control force seems to work, which is shown in Fig. 10b. According to the result, some conclusion can be given: the optimal shock isolator still works when the frequency becomes low.
When X \(=\) 73 g, the equivalent initial velocity is 2.73 m/s, which is lower than the critical initial velocity. The comparison of three types shock isolation performance is shown in Fig. 11. Though the equivalent initial velocity doesn’t overstep the critical value, the peak acceleration and peak relative displacement of type 3 have overstepped the limit a little. The optimal control force seems to be generated, that is shown in Fig. 11b, but it fails to keep the acceleration and relative displacement to be below the limit. The performance is adversely affected by low frequency ratio. But comparing the performance of three types isolator, the optimal shock isolator still get much more excellent performance than the conventional isolators.
7 Conclusions
In order to improve the shock isolation performance, an optimal shock isolation model is proposed in this paper. Some factors which are ignored by conventional design are considered. The relationship between optimal control force and critical initial velocity is analyzed, and the optimal shock isolation model and parameters are obtained based on that analysis. The optimal shock isolation model that is consisting of linear stiffness and quadratic damping is validated theoretically, especially; it is possible to implement the model in engineering. The simulation shows: under different peak acceleration and frequency ratio, the performance of optimal shock isolation model is much more excellent than conventional model, though the low frequency ratio would have some negative effect to the system. The new design mode would be significant for improvement of shock isolation performance.
References
Crede CE (1951) Vibration and shock isolation. Wiley, New York
Harris CM (1988) Shock and vibration handbook, 3rd edn. McGraw-Hill, New York
Zhao Y, He L, Huang Y (2005) J Vib Shock 24:71–76 (in Chinese)
Rudolph JS, Henry CP (2000) Naval shock analysis and design, the shock and vibration information analysis center booz. Allen and Hamilton, Inc., McLean
Lou J, Zhu S, Tang S (2011) Noise Vib Control 4:37–41
Shi L, He L, Zhang H, Zhu R (2011) Noise Vib Control 3:104–111
Shan S, He L (2006) Noise Vib Shock 25:144–147, 161
Zhang X, Wang G (2005) Noise Vib Control 2:7–10
Wang G, Shen R, Wu G (2003) Noise Vib Control 6:25–28
Wang G, Shen R, Hua H, Wu G (2006) J Ship Mech 10:135–144
Balandin DV, Bolotnik NN, Pilkey WD (1999) Shock, and vibration. Gordon and Breach, Newark
Bolotnik NN (1983) Optimization of shock and vibration isolation systems. Nauka, Moscow (in Russian)
Sevin E, Pilkey WD (1971) Optimum shock and vibration isolation. Shock and Vibration Information Analysis Center, Washington, DC
Ryaboy VM (1995) J Struct Eng 186:1–21
Cheng Z, Pilkey WD (1999) Finite Elem Anal Des 33:233–245
Pilkey WD, Kang W, Schramm U (1997) Finite Elem Anal Des 27:7–17
Kent RW, Purtsezov SV, Pilkey WD (2007) Int J Impact Eng 34:1382–1395
Kelly JM (1999) Earthq Eng Struct Dyn 28:3–20
Hundal MS (1981) J Sound Vib 76:273–281
Shekhar NC, Hatwal H, Malik AK (1998) J Sound Vib 214:589–603
Shekhar NC, Hatwal H, Malik AK (1999) J Sound Vib 227:293–307
Hou CY (2008) J Struct Eng 134:56–63
Acknowledgments
This work was financially supported by the National Natural Science Funds of China (51009143) and the Foundation for the Author of National Excellent Doctoral Dissertation of PR China (201057).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lou, J., Sun, J., Tang, S. et al. Study on the optimization of the shock isolation system based on the limiting performance analysis. Int. J. Dynam. Control 2, 415–424 (2014). https://doi.org/10.1007/s40435-013-0045-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-013-0045-6