
Abstract
We present the theory of Cauchy–Fantappié integral operators, with emphasis on the situation when the domain of integration, , has minimal boundary regularity. Among these operators we focus on those that are more closely related to the classical Cauchy integral for a planar domain, whose kernel is a holomorphic function of the parameter . The goal is to prove estimates for these operators and, as a consequence, to obtain estimates for the canonical Cauchy–Szegö and Bergman projection operators (which are not of Cauchy–Fantappié type).
Similar content being viewed by others


1 Introduction
The purpose of this survey is to study Cauchy-type integrals in several complex variables and to announce new results concerning these operators. While this is a broad field with a very wide literature, our exposition will be focused more narrowly on achieving the following goal: the construction of such operators and the establishment of their mapping properties under “minimal” conditions of smoothness of the boundary of the domain in question.
The operators we study are of three interrelated kinds: Cauchy–Fantappié integrals with holomorphic kernels, Cauchy–Szegö projections and Bergman projections. In the case of one complex variable, what happens is by now well-understood. Here the minimal smoothness that can be achieved is “near” (e.g., the case of a Lipschitz domain). However when the complex dimension is greater than 1 the nature of the Cauchy–Fantappié kernels brings in considerations of pseudo-convexity (in fact strong pseudo-convexity) and these in turn imply that the limit of smoothness should be “near” .
We establish -regularity for one or more of these operators in the following contexts:
-
When is strongly pseudo-convex and of class ;
-
When is strongly -linearly convex and of class
with in the range . See Theorems 1–4 for the precise statements.
This survey is organized as follows. In Sect. 2 we briefly review the situation of one complex variable. Section 3 is devoted to a few generalities about Cauchy-type integrals when , the complex dimension of the ambient space, is greater than 1. The Cauchy–Fantappié forms are taken up in Sect. 4 and the corresponding Cauchy–Fantappié integral operators are set out in Sect. 5. Here we adapt the standard treatment in [34, Chapt. IV], but our aim is to show that these methods apply when the so-called generating form is merely of class or even Lipschitz, as is needed in what follows.
The Cauchy–Fantappié integrals constructed up to that point may however lack the basic requirement of producing holomorphic functions, whatever the given data is. In other words, the kernel of the operator may fail to be holomorphic in the free variable . To achieve the desired holomorphicity requires that the domain be pseudo-convex, and two specific forms of this property, strong pseudo-convexity and strong-linear convexity are discussed in Sect. 6.
There are several approaches to obtain the required holomorphicity when the domain is sufficiently smooth and strongly pseudo-convex. The initial methods are due to Henkin [17, 18] and Ramirez [33]; a later approach is in Kerzman–Stein [21], which is the one we adopt here. It requires to start with a “locally” holomorphic kernel, and then to add a correction term obtained by solving a -problem. These matters are discussed in Sects. 7–9. One should note that in the case of strongly -linearly convex domains, the Cauchy–Leray integral given here requires no correction. So among all the integrals of Cauchy–Fantappié type associated to such domains, the Cauchy–Leray integral is the unique and natural operator that most closely resembles the classical Cauchy integral from one complex variable.
The main estimates for the Cauchy–Leray integral and the Szegö and Bergman projections (for boundaries) are the subject of a series of forthcoming papers; in Sect. 10 we limit ourselves to highlighting the main points of interest in the proofs. For the last two operators, the results are consequences of estimates that hold for the corrected Cauchy–Fantappié kernels, denoted and , that involve also their respective adjoints. Section 11 highlights a further result concerning the Cauchy–Leray integral, also to appear in a separate paper: the corresponding theorem under the weaker assumption that the boundary is merely of class .
A survey of this kind must by the nature of the subject be far from complete. Among matters not covered here are results for the Szegö and Bergman projection and for the Cauchy–Leray integral for other special domains (in particular, with more regularity). For these, see e.g. [2–4, 6–8, 12, 13, 15, 23, 29, 30, 32, 37]. It is to be noted that several among these works depend in the main on good estimates or explicit formulas for the Szegö or Bergman kernels. In our situation these are unavailable, and instead we have to proceed via the Cauchy–Fantappié framework.
A few words about notation: Euclidean volume measure for () will be denoted . The notation will indicate the boundary of a domain () and, for sufficiently smooth, will denote arc-length () or Euclidean surface measure ().
2 The Case
In the case of one complex dimension the problem of estimates has a long and illustrious history. Let us review it briefly. (Some details can be found in [10, 16, 24], which contain further citations to the literature.)
Suppose is a bounded domain in whose boundary is a rectifiable curve. Then the Cauchy integral is given by
where is the Cauchy kernel
When is the unit disc, then a classical theorem of M. Riesz says that the mapping , defined initially for that are (say) smooth, is extendable to a bounded operator on , for . Very much the same result holds when the boundary of is of class , with , (proved either by approximating to the result when is the unit disc, or adapting one of the several methods of proof used in the classical case). However in the limiting case when , these ideas break down and new methods are needed. The theorems proved by Calderón, Coifman, McIntosh, Meyers and David (between 1977–1984) showed that the corresponding result held in the following list of increasing generality: the boundary is of class ; it is Lipschitz (the first derivatives are merely bounded and not necessarily continuous); it is an “Ahlfors-regular” curve.
We pass next to the Cauchy–Szegö projection , the corresponding orthogonal projection with respect to the Hilbert space structure of . In fact when is the unit disc, the two operators and are identical. Let us now restrict our attention to the case when is simply connected and when its boundary is Lipschitz. Here a key tool is the conformal map , where is the unit disc. We consider the induced correspondence given by , and the fact that , where is the Cauchy–Szegö projection for the disc . Using ideas of Calderón, Kenig, Pommerenke and others, one can show that belongs to the Muckenhaupt class , with , from which one gets the following. As a consequence, if we suppose that has a Lipschitz bound , then is bounded on , whenever
-
, if is in fact of class .
-
. Here depends on , but , and is the exponent dual to .
There is an alternative approach to the second result that relates the Cauchy–Szegö projection to the Cauchy integral . It is based on the following identity, used in [21]
There are somewhat analogous results for the Bergman projection in the case of one complex dimension. We shall not discuss this further, but refer the reader to the papers cited above.
3 Cauchy integral in ; some generalities
We shall see that a very different situation occurs when trying to extend the results of Sect. 2 to higher dimensions. Here are some new issues that arise when
-
i
There is no “universal” holomorphic Cauchy kernel associated to a domain .
-
ii
Pseudo-convexity of , must, in one form or another, play a role.
-
iii
Since this condition involves (implicitly) two derivatives, the “best” results are to be expected “near” , (as opposed to near when ).
In view of the non-uniqueness of the Cauchy integral (and its problematic existence), it might be worthwhile to set down the minimum conditions that would be required of candidates for the Cauchy integral. We would want such an operator given in the form
to satisfy the following conditions:
-
(a)
The kernel should be given by a “natural” or explicit formula (at least up to first approximation) that involves .
-
(b)
The mapping should reproduce holomorphic functions. In particular if is continuous in and holomorphic in then , for .
-
(c)
should be holomorphic in , for any given that is continuous on .
Now there is a formalism (the Cauchy–Fantappié formalism of Fantappié (1943), Leray, and Koppleman (1967)), which provides Cauchy integrals satisfying the requirements (a) and (b) in a general setting. Condition (c) however, is more problematic, even when the domain is smooth. Constructing such Cauchy integrals has been carried out only in particular situations, (see below).
4 Cauchy–Fantappié theory in higher dimension
The Cauchy–Fantappié formalism that realizes the kernel revolves around the notion of generating form: these are a class of differential forms of type in the variable of integration whose coefficients may depend on two sets of variables ( and ), and we will accordingly write
to designate such a form. The precise definition is given below, where the notation
is used to indicate the action of on the vector .
Definition 1
The form is generating atrelative to if there is an open set
such that
and, furthermore
We say that is a generating form for (alternatively, that supports a generating form) if for any we have that is generating at relative to .
Example 1
Set
We define the Bochner–Martinelli generating formto be
It is clear that satisfies conditions (4.1) and (4.2) for any domain and for any , with .
The Bochner–Martinelli generating form has several remarkable features. First, it is “universal” in the sense that it is given by a formula (4.3) that does not depend on the choice of domain ; secondly, in complex dimension it agrees (up to a scalar multiple) with the classical Cauchy kernel
and in particular its coefficient is holomorphic as a function of for any fixed . On the other hand, it is clear from (4.3) that for the coefficients of this form are nowhere holomorphic: this failure at holomorphicity is an instance of a crucial, dimension-induced phenomenon which was alluded to in conditions ii. and (c) in Sect. 3 and will be further discussed in Example 2 below and in Sect. 6.
4.1 Cauchy–Fantappié forms
Suppose now that for each fixed is a form of type in with coefficients of class in each variable. (We are not assuming that is a generating form). Set
where stands for the wedge product: performed -times. We call the Cauchy-Fantappiè form for. Note that is of type in the variable while in the variable it is just a function.
Example 2
The Cauchy–Fantappié form for the Bochner–Martinelli generating form or, for short, Bochner–Martinelli CF form is
Now the Bochner–Martinelli integral is the operator
where the kernel is the Bochner–Martinelli CF form restricted to the boundary; more precisely
where denotes the pullback of forms under the inclusion
It is clear that such operator is “natural” in the sense discussed in condition (a) in Sect. 3, and we will see in Sect. 5 that this operator also satisfies condition (b), see Proposition 1 in that section. On the other hand, the kernel is nowhere holomorphic in : as a result, when the Bochner–Martinelli integral does not satisfy condition (c).
We will now review the properties of Cauchy-Fantappiè forms that are most relevant to us.
Basic Property 1
For any function we have
Proof
The proof is a computation: by the definition (4.4), we have
On the other hand, computing produces two kinds of terms:
-
(a.)
Terms that contain : but these do not contribute to because (which follows from since has degree );
-
(b.)
The term , which gives the desired conclusion.
Suppose, further, that is generating at relative to . Then the following two properties also hold.
Basic Property 2
We have that
Note that if the coefficients of are in , then as a consequence of the fact that , we have that and (4.5) can be formulated equivalently as
Proof
We prove (4.5) in the case: and leave the proof for general as an exercise for the reader. Thus, writing
we obtain
Now
because is generating at , and applying to each side of this identity we obtain
Recall that , see Definition 1, and so
where
But for any two sets and one has where denotes disjoint union. Now, if then (4.7) reads
but this implies
One similarly obtains
We are left to consider the case when ; note that since
showing that for any is now equivalent to showing that
To this end, combining (4.6) with (4.7) we find
and indeed
because is a form of degree 1.
Let be a form of type in the variable (not necessarily generating for ) and with coefficients in ; set
Note that is of type in the variable and of type in the variable . We call the Cauchy-Fantappie’ form of order 1 for, and the previous one, , will now be called Cauchy-Fantappie’ form of order 0.
In the previous properties was fixed; here it is allowed to vary.
Basic Property 3
We have (again for generating at )
For any , where is as in (4.2). Note that if the coefficients are in fact of class in each variable, then (4.11) has the equivalent formulation
Proof
As before, we specialize to the case: and leave the proof of the general case as an exercise for the reader. For identity (4.11) reads
By the Leibniz rule we have
and so it is clear that (4.13) will follow if we can show that
for any generating form with coefficients of class . Proceeding as in the proof of basic property 2, we decompose
where and are as in (4.8) and (4.9), respectively. Again, we have
because is generating, and applying to each side of this identity we find
Similarly, applying , we have
Now
Note that if then , and so showing that
is equivalent to showing that
that is (using (4.16))
but this is indeed true by the generating form hypothesis on as expressed in (4.14) and (4.15). This shows that the desired conclusion is true when ; the case: is dealt with in a similar fashion. Finally, if , then and
but the two terms in the righthand side of this identity cancel out on account of (4.14) and (4.15).
5 Reproducing formulas: some general facts
In this section we highlight the theory of reproducing formulas for holomorphic functions by means of integral operators that arise from the Cauchy–Fantappié formalism. One of our goals here is to show that the usual reproducing properties of such operators extend to the situation where the data and the generating form have lower regularity. We begin with a rather specific example: the reproducing formula for the Bochner–Martinelli integral, see Proposition 1. The proof of this result is a consequence of a recasting of the classical mean value property for harmonic functions in terms of an identity (5.1) that links the Bochner-artinelli CF form on a sphere with the sphere’s Euclidean surface measure.
Because the Bochner–Martinelli integral of a continuous function is, in general, not holomorphic in , in fact we need a more general version of Proposition 1 that applies to integral operators whose kernel is allowed to be any Cauchy–Fantappié form: this is done in Proposition 2.
While the operators defined so far are given by surface integrals over the boundary of the ambient domain, following an idea of Ligocka [26] another family of integral operators can be defined (essentially by ifferentiating the kernels of the operators in the statement of Proposition 2) which are realized as ‘solid” integrals over the ambient domain, and we show in Proposition 3 that such operators, too, have the reproducing property.
Lemma 1
Let be given and consider a ball centered at such , .
Then, at the center and for any we have that the Bochner–Martinelli CF form for the ball has the following representation
where is the element of Euclidean surface measure for , and
denotes surface measure of the sphere .
Proof
We claim that the desired conclusion is a consequence of the following identity
where, as usual, we have set , and denotes the Hodge-star operator mapping forms of type to forms of type . Let us first prove (5.1) assuming the truth of (5.2). To this end, we first note that from (5.2) and basic property 1 we have
But with , a defining function for . Now recall that where is the inclusion: , see Example 2, so that . Combining these facts we conclude that, for as above
and since whenever , we obtain
but
see [34, corollary III.3.5], and this gives (5.1).
We are left to prove (5.2): to this end, we assume and leave the case of arbitrary complex dimension as an exercise to for the reader. Since
and
then
On the other hand
and so
This shows (5.2) and concludes the proof of the lemma.
(We remark in passing that identity (5.1), while valid for the Bochner–Martinelli generating form, is not true for general .)
Definition 2
Given an integer and a bounded domain , we say that is of class (alternatively, is -smooth)if there is an open neighborhood of the boundary of , and a real-valued function such that
and
Any such function is called a defining function for.
From this definition it follows that
Proposition 1
For any bounded domain with boundary of class and for any , we have
Proof
Given , let be such that
Note that the mean value property for harmonic functions:
and identity (5.1) give
To prove the conclusion, we apply Stokes’ theorem on the set
and we obtain
But by basic property 2, and since is holomorphic, we have
and so the previous identity becomes
but the lefthand side is , while (5.4) says that the righthand side equals .
Proposition 2
Let be a bounded domain of class and let be given. Suppose that is a generating form at relative to . Suppose, furthermore, that the coefficients of are in , where is as in Definition 1. Then, we have
Proof
Consider a smooth open neighborhood of , which we denote , such that
where is as in (4.1) and (4.2).Now fix two neighborhoods and of the boundary of such that
and let be a smooth cutoff function such that
Define
and
Then is generating at relative to (and the open set of Definition 1 is the same for and for ); furthermore, it follows from (5.6) that
Now let be a sequence of -forms with coefficients in with the property that
Suppose first that . Then by type considerations (and since is holomorphic in a neighborhood of ) for any and for any we have
Thus, applying Stokes’ theorem on we find
Letting in the identity above we obtain
Since is generating at , by basic property 2 this expression is reduced to
But
as a result, (5.8) reads
On the other hand, for a (smooth) open set , and using Proposition 1 we conclude that (5.5) holds in the case when . To prove the conclusion in the general case: , we write , so that (since ) and furthermore
But and so ; moreover
Thus, (5.5) grants
where denotes the pullback under the inclusion .
The conclusion now follows by letting .
We remark that in the case when is the Bochner–Martinelli generating form , Proposition 2 is simply a restatement of Proposition 1. However, since the coefficients of the Bochner–Martinelli CF form are nowhere holomorphic in the variable , Proposition 1 is of limited use in the investigation of the Cauchy–Szegö and Bergman projections, and Proposition 2 will afford the use of more specialized choices of .
The following reproducing formula is inspired by an idea of Ligocka [26].
Proposition 3
With same hypotheses as in Proposition 2, we have
for any -form with coefficients in such that
where denotes the pullback under the inclusion .
Note that if one further assumes that the coefficients of are in then, as a consequence of the fact that , we have
Proof
Fix arbitrarily and let be such that
Suppose first that . Applying Stokes’ theorem to the -form with coefficients in
we find
On the other hand, since the coefficients of are in , we have
and so the previous identity can be written as
Letting in the identity above and using (5.11) we obtain
Combining the latter with the hypothesis (5.10) we obtain
where the last identity is due to Proposition 2.
If then , where is as in (5.9); moreover, , so by the previous case we have
The conclusion now follows by observing that
as , by the Lebesgue dominated convergence theorem.
Note that the extension , with as in (5.7), satisfies a stronger condition than (5.10), namely the identity
On the other hand, it will become clear in the sequel that this simple-minded extension is not an adequate tool for the investigation of the Bergman projection, and more ad-hoc constructions are presented in Sects. 7 and 9.
6 The role of pseudo-convexity
In order to obtain operators that satisfy the crucial condition (c) in Sect. 3 one would need generating forms whose coefficients are holomorphic. However, in contrast with the situation for the planar case (where the Cauchy kernel plays the role of a universal generating form with holomorphic coefficient) in higher dimension there is a large class of domains that cannot support generating forms with holomorphic coefficients.Footnote 1 This dichotomy is related to the notion of domain of holomorphy, that is, the property that for any boundary point there is a holomorphic function that cannot be continued holomorphically in a neighborhood of . (Such notion is in turn equivalent to the notion of pseudo-convexity.) It is clear that every planar domain is a domain of holomorphy, because in this case one may take where has been fixed. On the other hand the following
is a simple example of a smooth domain in that is not a domain of holomorphy; other classical examples are discussed e.g., in [34, theorem II.1.1.]. A necessary condition for the existence of a generating form whose coefficients are holomorphic in the sense described above is then that be a domain of holomorphy. To prove the necessity of such condition, it suffices to observe that as a consequence of (4.2) and (4.1) one has
It is now clear that for each fixed , at least one of the ’s blows up as (and it is well known that this is strong enough to ensure that be a domain of holomorphy).
In its current stage of development, the Cauchy–Fantappié framework is most effective in the analysis of two particular categories of pseudo-convex domains: these are the strongly pseudo-convex domains and the related category of strongly-linearly convex domains.
Definition 3
We say that a domain is strongly pseudo-convex if is of class and if any defining function for satisfies the following inequality
where denotes the complex tangent space toat, namely
see [34, proposition II.2.14].
If is of class with , and if and are two distinct defining functions for , it can be shown that there is a positive function of class in a neighborhood of the boundary of , such that
and
see [34, lemma II.2.5]. As a consequence of (6.3), if condition (6.2) is satisfied by one defining function then it will be satisfied by every defining function. The hermitian form defined by (6.2) is called the Levi form, or complex Hessian, of at . We remark that in fact there is a “special” defining function for that is strictly plurisubharmonic on a neighborhood of , that is
see [34, proposition II.2.14], and we will assume throughout the sequel that satisfies this stronger condition.
We should point out that there is another notion of strong pseudo-convexity that includes the domains of Definition 3 as a subclass (this notion does not require the gradient of to be non-vanishing on ); within this more general context, the domains of Definition 3 are sometimes referred to as “strongly Levi-pseudo-convex”, see [34, §II.2.6 and II.2.8].
Definition 4
We say that is strongly-linearly convex if is of class and if any defining function for satisfies this inequality:
We we call those domains that satisfy the following, weaker condition
strictly-linearly convex. This condition is related to certain separation properties of the domain from its complement by (real or complex) hyperplanes, see [1], [20, IV.4.6]: that this must be so is a consequence of the assertion that, for and as in (6.5), the quantity is comparable to the Euclidean distance of to the complex tangent space ; we leave the verification of this assertion as an exercise for the reader.
It is not difficult to check that
is strictly, but not strongly, -linearly convex.
Lemma 2
If is strictly -linearly convex then for any there is an open set such that and inequality (6.6) holds for any in . Furthermore, if is strongly -linearly convex then the improved inequality (6.5) will hold for any .
Proof
Suppose that is strictly -linearly convex and fix . By the continuity of the function , if (6.6) holds at then there is an open neighborhood such that for any and so we have that whenever
It is clear that ; furthermore, since then for any and so .
If is strongly -linearly convex then the conclusion will follow by considering the function .
Remark 1
We recall that in the classical definition of strong (resp. strict) convexity, the quantity in the left-hand side of (6.5) (resp. (6.6)) is replaced by : it follows that any strongly (resp. strictly) convex domain is indeed strongly (resp. strictly) -linearly convex, but the converse is in general not true. It is clear that strongly (resp. strictly) convex domains satisfy a version of Lemma 2.
Lemma 3
Any strongly -linearly convex domain of class is strongly pseudo-convex.
The key point in the proof of this lemma is the observation that, as a consequence of (6.5), the real tangential Hessian of any defining function for a domain as in Lemma 3 is positive definite when restricted to the complex tangent space (viewed as a vector space over the real numbers). The converse of Lemma 3 is not true: we leave as an exercise for the reader to verify that the following (smooth) domain
is strongly pseudo-convex but not strongly -linearly convex.
In closing this section we remark that while the designations “strongly” and “strictly” indicate distinct families of -linearly convex domains (and of convex domains), for pseudo-convex domains there is no such distinction, and in fact in the literature the terms “strictly pseudo-convex” and “strongly pseudo-convex” are often interchanged: this is because the positivity condition (6.4) implies the seemingly stronger inequality
Indeed, if (6.4) holds then the function is positive, and by bilinearity it follows that for any ; since is of class (and is bounded) we may further take the minimum of over, say, and thus obtain (6.7), see [34, II.(2.26)].
7 Locally holomorphic kernels
A first step in the study of the Bergman and Cauchy–Szegö projections is the construction of integral operators with kernels given by Cauchy–Fantappié forms that are (at least) locally holomorphic in , that is for in a neighborhood of each (fixed) : it is at this juncture that the notion of strong pseudo-convexity takes center stage. In this section we show how to construct such operators in the case when is a bounded, strongly pseudo-convex domain, and we then proceed to prove the reproducing property.
To this end, we fix a strictly plurisubharmonic defining function for ; that is, we fix
such that ; for any and
where denotes the Levi form for , see (6.2) and (6.7). Consider the Levi polynomial ofat:
Lemma 4
Suppose is bounded and strongly pseudo-convex. Then, there is such that
whenever and .
Here is as in (7.1). We leave the proof of this lemma, along with the corollary below, as an exercise for the reader. Now let be a smooth cutoff function such that
where is as in Lemma 4 and set
Lemma 5
Suppose is strongly pseudo-convex and of class . Then, there is such that
whenever
and
Proof
It suffices to choose : the desired inequalities then follow from Lemma 4.
Corollary 1
Let be a bounded, strongly pseudo-convex domain. Let
Define
where and are as in (7.1) and (7.2), and set
with as in (7.3). Then we have that is a generating form for , and one may take for in Definition 1 the set
Note, however, that the coefficients of in this construction are only continuous in the variable and so the Cauchy–Fantappié form cannot be defined for such because doing so would require differentiating the coefficients of with respect to , see (4.4). For this reason, proceeding as in [34], we refine the previous construction as follows. For as in Lemma 4 and for any , we let be such that
We now define the following quantities:
and, for as in (7.1):
and finally
Lemma 6
Let be a bounded strongly pseudo-convex domain. Then, there is such that for any and for any , we have that defined as above is generating at relative to with an open set (see Definition 1) that does not depend on . Furthermore, we have that for each (fixed) the coefficients of are in .
Proof
We first observe that can be expressed in terms of the Levi polynomial , as follows
and so by Lemma 4 we have
for any
whenever and . Proceeding as in the proof of Lemma 5 we then find that
for any whenever
and
as soon as we choose
We then define the open set as in (7.4) but now with in place of (note that does not depend on ). Then, proceeding as in the proof of corollary 1 we find that
From this it follows that is a generating form for ; it is clear from (7.5) that the coefficients of are in .
Lemma 6 shows that satisfies the hypotheses of Proposition 2; as a consequence we obtain the following results:
Proposition 4
Let be a bounded strongly pseudo-convex domain. Then, for any we have
where and are as in Lemma 6.
Proposition 5
Let be a bounded strongly pseudo-convex domain. Let
where is as in Lemma 6. Then, for any we have
Proof
We claim that satisfies the hypotheses of Proposition 3 for any . Indeed, proceeding as in the proof of Lemma 6 we find that
and for any ; from this it follows that
Moreover, as a consequence of basic property 1 we have
but this grants
The conclusion now follows from Proposition 3.
8 Correction terms
Propositions 4 and 5 have a fundamental limitation: it is that these propositions employ kernels, namely and , that are only locally holomorphic as functions of , that is, they are holomorphic only for . In this section we address this issue by constructing for each of these kernels a “correction” term obtained by solving an ad-hoc -problem in the -variable.
Throughout this section we shift our focus from the -variable to , that is: we fix , we regard as a variable and we define the “parabolic” region
The region has the following properties:
As a consequence of these properties we have that
Lemma 7
Let be a bounded strongly pseudo-convex domain. Then, there is such that
for any (fixed) . Furthermore, there is a bounded strongly pseudo-convex of class such that
where is as in (8.1).
Proof of Lemma 7
For the first conclusion, we claim that it suffices to choose as in (7.7). Indeed, given , if then and since (as ) it follows that . On the other hand, if then of course .
To prove the second conclusion note that, since (the defining function of ) is of class and is strictly plurishubharmonic in a neighborhood of , there is such that
and
Then is smooth and strongly pseudo-convex; we leave it as an exercise for the reader to verify that satisfies the desired inclusions: .
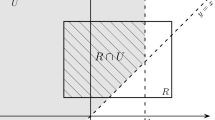
Lemma 7 shows that (the smooth and strongly pseudo-convex domain) has the following properties, see Fig. 1:
We now set up two -problems on . For the first -problem, we begin by observing that if is in and is in then (that this must be so can be seen from the inequalities for Re that were obtained in the proof of Lemma 6), and so the coefficients of are in whenever . Now fix arbitrarily and denote by the following double form, which is of type in , and of type in
Now for each fixed , the coefficients of are holomorphic in for and so is defined consistently in . It is also clear that is for , and as such it depends continuously on . Moreover we have that , for .

The region in the case when
For the second -problem, we begin by observing that if is in and is in then (that this must be so can again be seen from the inequalities for Re in the proof of Lemma 6), and so the coefficients of are in whenever . Fixing arbitrarily, we denote by the following double form, which is of type in , and of type in
Now for each fixed , the coefficients of are holomorphic in for and so is defined consistently in . It is also clear that is for , and as such it depends continuously on . Moreover we have that , for .
Now let be the solution operator, giving the normal solution of the problem in , via the -Neumann problem, so that satisfies the above whenever is a -form with . We set
and
Then by the regularity properties of , for which see e.g., [9, chapters 4 and 5], or [14], we have that is in , as a function of , and is continuous for . Moreover , for (recall that ) so
We similarly have that is in , as a function of , and is continuous for and, furthermore
9 Reproducing formulas: globally holomorphic kernels
At last, in this section we complete the construction of a number of integral operators that satisfy all three of the fundamental conditions (a)–(c) that were presented in Sect. 3. The crucial step in all these constructions is to produce integral kernels that are globally holomorphic in as functions of . For strongly pseudo-convex domains, this goal is achieved by adding to each of the (locally holomorphic) Cauchy–Fantappié forms that were produced in Sect. 7 the ad-hoc “correction” term that was constructed in Sect. 8; the resulting two families of operators are denoted (acting on ) and (acting on ). In the case of strongly -linearly convex domains of class , there is no need for “correction”: a natural, globally holomorphic Cauchy–Fantappié form is readily available that gives rise to an operator acting on (even on ), called the Cauchy–Leray Integral and, in the more restrictive setting of strongly convex domains, also to an operator that acts on . (As we shall see in Sect. 10, in the special case when the domain is the unit ball, the Cauchy–Leray integral agrees with the Cauchy–Szegö projection , while the operator agrees with the Bergman projection .) All the operators that are produced in this section satisfy, by their very construction, conditions (a) and (c) in Sect. 3, and we show in Propositions 6 through 9 that they also satisfy condition (b) (the reproducing property for holomorphic functions).
9.1 Strongly pseudo-convex domains
For is as in Proposition 4 we now write
and let
and we define the operator
Proposition 6
Let be a bounded strongly pseudo-convex domain. Then, for any we have
Proof
By Proposition 4, for any we have
and so it suffices to show that
By Fubini’s theorem and the definition of , see (8.3), we have
where is as in (8.2). Since the solution operator is realized as a combinations of integrals over and , the desired conclusion will be a consequence of the following claim:
and since for any , proving the latter amounts to showing that
where we have set
see (8.2) and Fig. 2 below. To this end, we fix arbitrarily; we claim that there is a sequence of forms with the following properties:
-
a.
is generating at relative to ;
-
b.
has coefficients in with as in Definition 1;
-
c.
as , we have that
-
d.
the coefficients of are holomorphic in for any .
Note that (9.2) will follow from item c. above if we can prove that

The manifold in the proof of Proposition 6
We postpone the construction of to later below, and instead proceed to proving (9.4) assuming the existence of the . On account of items a. and b. above along with basic property 3 as stated in (4.12), proving (9.4) is equivalent to showing that
To this end, we first consider the case when , as in this case we have that
(where in the last identity we have used the fact that because is of type in ). But the latter equals
where denotes the exterior derivative operator for viewed as a real manifold of dimension . Applying Stokes’ theorem on to the form we obtain
but
because the coefficients of are holomorphic in for any , see (4.10) and item d. above. This concludes the proof of Proposition 6 in the case when .
To prove the proposition in the case when , we fix and choose such that
Then we have that
and so by the previous argument we have
where denotes the pullback under the inclusion: . For sufficiently small there is a natural one-to-one and onto projection along the inner normal direction:
and because is of class one can show that this projection tends in the -norm to the identity , that is we have that
Using this projection one may then express the integral on in identity (9.5) as an integral on for an integrand that now also depends on and its Jacobian, and it follows from the above considerations that
We are left to construct, for each fixed , the sequence that was invoked earlier on. To this end, set
where is the open neighborhood of that was determined in Lemma 6. Consider a sequence of real-valued functions such that
and, for fixed arbitrarily, set
and, for as in (7.1):
and, finally
We leave it as an exercise for the reader to verify that has the desired properties.
Next, for is as in Proposition 5, we write
and
and we define the operator
Proposition 7
Let be a bounded strongly pseudo-convex domain. Then, for any we have
Proof
By Proposition 5, for any we have
and so it suffices to show that
For the proof of this assertion we refer to [25, Proposition 3.2].
9.2 Strictly -linearly convex domains: the Cauchy–Leray integral
Let be a bounded, strictly -linearly convex domain. We claim that if is (any) defining function for such a domain, and if is an open neighborhood of such that for any , then
is a generating form for ; indeed, by Lemma 2 for any there is an open set such that for any and ; thus the coefficients of are in and (4.1) holds. It is clear from (9.7) that for any , so (4.2) holds for any , as well. It follows that Proposition 2 applies to any strictly -linearly convex domain with chosen as above under the further assumption that be of class (which is required to ensure that the coefficients of are in ). The form
is called the Cauchy–Leray kernel for. It is clear that the coefficients of the Cauchy–Leray kernel are globally holomorphic with respect to : indeed the denominator is polynomial in the variable , and by the strict -linear convexity of we have that for any and for any , see (6.6). The resulting integral operator:
is called the Cauchy–Leray Integral. Under the further assumption that be strictly convex (as opposed to strictly -linearly convex), for each fixed one may extend holomorphically to the interior of as follows
The following lemma shows that if is sufficiently smooth (again of class ) then satisfies the hypotheses of Proposition 3, and so in particular the operator
with
and given by (9.10), reproduces holomorphic functions.Footnote 2
Lemma 8
If is strictly convex and of class , then for each fixed we have that given by (9.10) has coefficients in and satisfies the hypotheses of Proposition 3.
Proof
In order to prove the first assertion it suffices to show that
Indeed, one first observes that if is strictly convex and sufficiently smooth then
(see [20] for the proof of this fact) so that is non-negative in and it vanishes only at . On the other other hand the term is non-negative for any , and if then . This proves (9.12) and it follows that the coefficients of are in . By basic property 1 we have
it is now immediate to verify that so that satisfies (5.10), as desired.
We summarize these results in the following two propositions:
Proposition 8
Suppose that is a bounded, strictly -linearly convex domain of class . Then, with same notations as above we have
Proposition 9
Suppose that is a bounded, strictly convex domain of class . Then, with same notations as above we have that
10 estimates
In this section we discuss -regularity of the Cauchy–Leray integral and of the Cauchy–Szegö and Bergman projections for the domains under consideration. Detailed proofs of the results concerning the Bergman projection, Theorem 3 and corollary 3 below, can be found in [25]. The statements concerning the Cauchy–Leray integral and the Cauchy–Szegö projection (Theorems 1 and 2 below,and Theorem 4 in the next section) are the subject of a series of forthcoming papers; here we will limit ourselves to presenting an outline of the main points of interest in their proofs.
We begin by recalling the defining properties of the Bergman and Cauchy–Szegö projections and of their corresponding function spaces.
10.1 The Bergman projection
Let be a bounded connected open set.
Definition 5
For any the Bergman space is
The following inequality
which is valid for any compact subset and for any holomorphic function , shows that the Bergman space is a closed subspace of . This inequality also shows that the point evaluation:
is a bounded linear functional on the Bergman space (take ). In the special case , classical arguments from the theory of Hilbert spaces grant the existence of an orthogonal projection, called the Bergman projection for
that enjoys the following properties
where denotes Lebesgue measure for . The function is holomorphic with respect to ; it is called the Bergman kernel function. The Bergman kernel function depends on the domain and is known explicitly only for very special domains, such as the unit ball, see e.g. [35]:
here is the hermitian product for .
10.2 The Cauchy–Szegö projection
Let be a bounded connected open set with sufficiently smooth boundary. For such a domain, various notions of Hardy spaces of holomorphic functions can be obtained by considering (suitably interpreted) boundary values of functions that are holomorphic in and whose restriction to the boundary of has some integrability, see [36]. While a number of such definitions can be given, here we adopt the following
Definition 6
For any the Hardy Space is the closure in of the restriction to the boundary of the functions holomorphic in a neighborhood of . In the special case when the orthogonal projection
is called the The Cauchy–Szegö Projection for.
The Cauchy–Szegö projection has the following basic properties:
The function , initially defined for , extends holomorphically to ; it is called the Cauchy–Szegö kernel function. Like the Bergman kernel function, the Cauchy–Szegö kernel function depends on the domain ; for the unit ball we have [35]
10.3 -estimates
We may now state our main results.
Theorem 1
Suppose is a bounded domain of class which is strongly -linearly convex. Then the Cauchy–Leray integral (9.9), initially defined for , extends to a bounded operator on , .
It is only the weaker notion of strict -linear convexity that is needed to define the Cauchy–Leray integral, but to prove the results one needs to assume strong-linear convexity.
Theorem 2
Under the assumption that the bounded domain has a boundary and is strongly pseudo-convex, one can assert that extends to a bounded mapping on , when .
Theorem 3
Under the same assumptions on it follows that the operator extends to a bounded operator on for .
The following additional results also hold.
Corollary 2
The result of Theorem 2 extends to the case when the projection is replaced by the corresponding orthogonal projection , with respect to the Hilbert space where is any continuous strictly positive function on .
A similar variant of Theorem 3 holds for , the orthogonal projection on the sub-space of . Here is any strictly positive continuous function on .
Corollary 3
One also has the boundedness of the operator , whose kernel is , where is the Bergman kernel function.
10.4 Outline of the proofs
We begin by making the following remarks to clarify the background of these results.
-
(1)
The proofs of Theorems 2 and 3 make use of the whole family of operators , : in order to obtain estimates for in the full range one needs the flexbility to choose sufficiently small. (A single choice, as in [34], of for a fixed , will not do.)
-
(2)
There is no simple and direct relation between and , nor between and . Thus the results for general are not immediate consequences of the results for .
-
(3)
When and are smooth (i.e. for sufficiently high ), the above results have been known for a long time (see e.g., the remarks that were made in Sect. 9 concerning the case when is the unit ball). Moreover when and are smooth (and is strongly pseudo-convex), there are analogous asymptotic formulas for the kernels in question due to [13], which allow a proof of Theorems 2 and 3 in these cases. See also [32].
-
(4)
Another approach to Theorem 3 in the case of smooth strongly pseudo-convex domains is via the -Neumann problem [9] and [14], but we shall not say anything more about this here.
A further point of interest is to work with the “Levi-Leray” measure for the boundary of , which we define as follows. We take the linear functional
and write . We then have that where via the calculation in [34] in the case is of class , and we observe that , via (6.7).
With this we have that the Cauchy–Leray integral becomes
Thus the reason for isolating the measure is that the coefficients of the kernel of each of and its adjoint (computed with respect to ), are functions in both variables. This would not be the case if we replaced by the induced Lebesgue measure (and had taken the adjoint of with respect to ).
In studying (10.4) we apply the “T(1)-theorem”technique [11], where the underlying geometry is determined by the quasi-metric
(It is at this juncture that the notion of strong-linear convexity, as opposed to strict-linear convexity, is required.) In this metric, the ball centered at and reaching to has -measure .
The study of (10.4) also requires that we verify cancellation properties in terms of its action on “bump functions.” These matters again differ from the case , and in fact there is an unexpected favorable twist: the kernel in (10.4) is an appropriate derivative, as can be surmised by the observation that on the Heisenberg group one has . (However for , the corresponding identity involves the logarithm!). Indeed by an integration-by-parts argument that is presented in (11.1) below, we see that when and is of class ,
where
with
so that the operator is a negligible term.
A final point is that the hypotheses of Theorem 1 are in the nature of best possible. In fact, [4] gives examples of Reinhardt domains where the result for the Cauchy–Leray integral fails when a condition near is replaced by , or “strong” pseudo-convexity is replaced by its “weak” analogue.
One more observation concerning the Cauchy–Leray integral is in order. In the special case when is the unit ball , we claim that the operators and agree, respectively, with the Cauchy–Szegö and Bergman projections for . Indeed, for such domain the calculations in Sect. 9.2 apply with and
and by the Cauchy-Schwarz inequality we have Using (10.5) and (5.3)Footnote 3 we find that
which is the Cauchy–Szegö kernel for the ball, see (10.2) Next, we observe that, again for and with as in (10.5), we have that
and from this it follows that (9.11) now reads
which is the Bergman kernel of the ball, see (10.1).
There are three main steps in the proof of Theorem 2.
-
(i)
Construction of a family of bounded Cauchy Fantappié-type integrals
-
(ii)
Estimates for
-
(iii)
Application of a variant of identity (2.1)
Step (i). The construction of was given in sections 7 through 9, see (9.1). One notes that the kernel of the correction term that was produced in Sect. 8 is “harmless” since it is bounded as ranges over . Using a methodology similar to the proof of Theorem 1 one then shows
However it is important to point out, that in general the bound grows to infinity as , so that the can not be genuine approximations of . Nevertheless we shall see below that in a sense the gives us critical information about .
Step (ii). Here the goal is the following splitting:
Proposition 10
Given , we can write
where
and the operator has a bounded kernel, hence maps to .
We note that in fact the bound of the kernel of may grow to infinity as .
To prove Proposition 10 we first verify an important “symmetry” condition: for each , there is a , so that
Here is as in (7.6). With this one proceeds as follows. Suppose is the kernel of the operator . Then we take and to be the operators with kernels respectively and , where is as in (7.6) and , chosen acccording to (10.7).
Step (iii). We conclude the proof of Theorem 2 by using an identity similar to (2.1):
Hence
Now for each , take so that for the bound as in (10.6)
Then is invertible and we have
Since is bounded on , and also , it sufficies to see that is also bounded on . Assume for the moment that . Then since maps to , it also maps to (this follows from the inclusions of Lebesgue spaces, which hold in this setting because is bounded), while maps to itself, yielding the fact that is bounded on . The case is obtained by dualizing this argument.
The proof of Theorem 3 can be found in [25]: it has an outline similar to the proof of Theorem 2 with the operators , see (9.6), now in place of the , but the details are simpler since we are dealing with operators that converge absolutely (as suggested by corollary 3). Thus one can avoid the delicate -theorem machinery and make instead absolutely convergent integral estimates.
11 The Cauchy–Leray integral revisited
For domains with boundary regularity below the category there is no canonical notion of strong pseudo-convexity - much less a working analog of the Cauchy-type operators and that were introduced in the previous sections. By contrast, the Cauchy–Leray integral can be defined for less regular domains, but the definitions and the proofs are substantially more delicate than the framework of Theorem 1.
Definition 7
Given a bounded domain , we say that is of class if has a defining function (in the sense of Definition 2) that is of class in a neighborhood of ; that is, is of class and its (real) partial derivatives are Lipschitz functions with respect to the Euclidean distance in :
Theorem 4
Suppose is a bounded domain of class which is strongly -linearly convex. Then there is a natural definition of the Cauchy–Leray integral (9.9), so that the mapping initially defined for , extends to a bounded operator on for .
Note that in comparison with Theorems 2 and 3, here our hypotheses about the nature of convexity are stronger, but the regularity of the boundary is weaker.
First, we explain the main difficulty in defining the Cauchy–Leray integral in the case of domains. It arises from the fact that the definitions (9.8) and (10.3) involve second derivatives of the defining function . However is only assumed to be of class , so that these derivatives are functions on , and as such not defined on which has 2-dimensional Lebesgue measure zero. What gets us out of this quandary is that here in effect not all second derivatives are involved but only those that are “tangential” to . Matters are made precise by the following “restriction” principle and its variants.
Suppose and we want to define . We note that if were of class we would have
where is any form of class , and here is the induced mapping to forms on .
Proposition 11
For , there exists a unique 2-form in with coefficients so that (11.1) holds.
This is a consequence of an approximation lemma: There is a sequence of functions on , that are uniformly bounded in the norm, so that and uniformly on , and moreover converges a.e. on . Here is the “tangential” restriction of the Hessian of . Moreover the indicated limit, which we may designate as , is independent of the approximating sequence .
Notes
Much less a “universal” such form.
Note that does not satisfy the stronger condition (5.12) that was discussed earlier.
Along with the following, easily verified identity: .
References
Andersson, M., Passare, M., Sigurdsson, R.: Complex convexity and analytic functionals. Birkhäuser, Basel (2004)
Barrett, D.E.: Irregularity of the Bergman projection on a smooth bounded domain. Ann. Math. 119, 431–436 (1984)
Barrett, D.E.: Behavior of the Bergman projection on the Diederich-Fornæss worm. Acta Math. 168, 1–10 (1992)
Barrett, D., Lanzani, L.: The Leray transform on weighted boundary spaces for convex Rembrandt domains. J. Funct. Anal. 257, 2780–2819 (2009)
Bekollé, D., Bonami, A.: Inegalites a poids pour le noyau de Bergman. C. R. Acad. Sci. Paris Ser. A-B 286(18), A775–A778 (1978)
Bell, S., Ligocka, E.: A simplification and extension of Fefferman’s theorem on biholomorphic mappings. Invent. Math. 57(3), 283–289 (1980)
Bonami, A., Lohoué, N.: Projecteurs de Bergman et Szegő pour une classe de domaines faiblement pseudo-convexes et estimations . Compositio Math. 46(2), 159–226 (1982)
Charpentier, P., Dupain, Y.: Estimates for the Bergman and Szegő Projections for pseudo-convex domains of finite type with locally diagonalizable Levi forms. Publ. Math. 50, 413–446 (2006)
Chen, S.-C., Shaw, M.-C.: Partial differential equations in several complex variables. American Mathematical Society, Providence (2001)
David, G.: Opérateurs intégraux singuliers sur certain courbes du plan complexe. Ann. Sci. Éc. Norm. Sup. 17, 157–189 (1984)
David, G., Journé, J.L., Semmes, S.: Oprateurs de Caldern-Zygmund, fonctions para-accrtives et interpolation. Rev. Mat. Iberoamericana 1(4), 1–56 (1985)
Ehsani, D., Lieb, I.: -estimates for the Bergman projection on strictly pseudo-convex non-smooth domains. Math. Nachr. 281, 916–929 (2008)
Fefferman, C.: The Bergman kernel and biholomorphic mappings of pseudo-convex domains. Invent. Math. 26, 1–65 (1974)
Folland, G.B., Kohn, J.J.: The Neumann problem for the Cauchy–Riemann complex. In: Ann. Math. Studies, vol. 75. Princeton University Press, Princeton (1972)
Hansson, T.: On Hardy spaces in complex ellipsoids. Ann. Inst. Fourier (Grenoble) 49, 1477–1501 (1999)
Hedenmalm, H.: The dual of a Bergman space on simply connected domains. J. d’ Analyse 88, 311–335 (2002)
Henkin, G.: Integral representations of functions holomorphic in strictly pseudo-convex domains and some applications. Mat. Sb. 78, 611–632 (1969). Engl. Transl.: Math. USSR Sb. 7 (1969) 597–616
Henkin, G.M.: Integral representations of functions holomorphic in strictly pseudo-convex domains and applications to the -problem. Mat. Sb. 82, 300–308 (1970). Engl. Transl.: Math. USSR Sb. 11 (1970) 273–281
Henkin, G.M., Leiterer, J.: Theory of Functions on Complex Manifolds. Birkhäuser, Basel (1984)
Hörmander, L.: Notions of Convexity. Birkhäuser, Basel (1994)
Kerzman, N., Stein, E.M.: The Cauchy–Szegö kernel in terms of the Cauchy–Fantappié kernels. Duke Math. J. 25, 197–224 (1978)
Krantz, S.: Function theory of several complex variables, 2nd edn. American Mathematical Society, Providence (2001)
Krantz, S., Peloso, M.: The Bergman kernel and projection on non-smooth worm domains. Houston J. Math. 34, 873–950 (2008)
Lanzani, L., Stein, E.M.: Cauchy–Szegö and Bergman projections on non-smooth planar domains. J. Geom. Anal. 14, 63–86 (2004)
Lanzani, L., Stein E.M.: The Bergman projection in for domains with minimal smoothness. Illinois J. Math. (to appear) (arXiv:1201.4148)
Ligocka, E.: The Hölder continuity of the Bergman projection and proper holomorphic mappings. Studia Math. 80, 89–107 (1984)
McNeal, J.: Boundary behavior of the Bergman kernel function in . Duke Math. J. 58(2), 499–512 (1989)
McNeal, J.: Estimates on the Bergman kernel of convex domains. Adv. Math. 109, 108–139 (1994)
McNeal, J., Stein, E.M.: Mapping properties of the Bergman projection on convex domains of finite type. Duke Math. J. 73(1), 177–199 (1994)
McNeal, J., Stein, E.M.: The Szegö projection on convex domains. Math. Zeit. 224, 519–553 (1997)
Nagel, A., Rosay, J.-P., Stein, E.M., Wainger, S.: Estimates for the Bergman and Szegö kernels in . Ann. Math. 129(2), 113–149 (1989)
Phong, D., Stein, E.M.: Estimates for the Bergman and Szegö projections on strongly pseudo-convex domains. Duke Math. J. 44(3), 695–704 (1977)
Ramirez, E.: Ein divisionproblem und randintegraldarstellungen in der komplexen analysis. Ann. Math. 184, 172–187 (1970)
Range, M.: Holomorphic Functions and Integral Representations in Several Complex Variables. Springer, Berlin (1986)
Rudin, W.: Function Theory in the Unit Ball of . Springer, Berlin (1980)
Stein, E.M.: Boundary Behavior of Holomorphic Functions of Several Complex Variables. Princeton University Press, Princeton (1972)
Zeytuncu, Y.: -regularity of weighted Bergman projections. Trans. AMS. (2013, to appear)
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by S. K. Jain.
L. Lanzani was supported in part by the National Science Foundation, award DMS-1001304. E. M. Stein was supported in part by the National Science Foundation, award DMS-0901040, and by KAU of Saudi Arabia.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
About this article
Cite this article
Lanzani, L., Stein, E.M. Cauchy-type integrals in several complex variables. Bull. Math. Sci. 3, 241–285 (2013). https://doi.org/10.1007/s13373-013-0038-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13373-013-0038-y