
Abstract
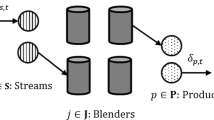
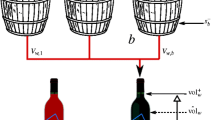
The mixture design problem for two products concerns finding simultaneously two recipes of a blending problem with linear, quadratic and semi-continuity constraints. A solution of the blending problem minimizes a linear cost objective and an integer valued objective that keeps track of the number of raw materials that are used by the two recipes, i.e. this is a bi-objective problem. Additionally, the solution must be robust. We focus on possible solution approaches that provide a guarantee to solve bi-blending problems with a certain accuracy, where two products are using (partly) the same scarce raw materials. The bi-blending problem is described, and a search strategy based on Branch-and-Bound is analysed. Specific tests are developed for the bi-blending aspect of the problem. The whole is illustrated numerically.






Similar content being viewed by others

References
Ashayeri J, van Eijs AGM, Nederstigt P (1994) Blending modelling in a process manufacturing: A case study. Eur J Oper Res 72(3):460–468
Bertrand JWM, Rutten WGMM (1999) Evaluation of three production planning procedures for the use of recipe flexibility. Eur J Oper Res 115(1):179–194
Casado LG, Hendrix EMT, García I (2007) Infeasibility spheres for finding robust solutions of blending problems with quadratic constraints. J Glob Optim 39(4):577–593
Claussen J, Zilinskas A (2002) Subdivision, sampling and initialization strategies for simplicial branch and bound in global optimization. Comput Math Appl 44(7):943–955
Hendrix EMT, Mecking CJ, Hendriks THB (1996) Finding robust solutions for product design problems. Eur J Oper Res 92(1):28–36
Hendrix EMT, Casado LG, García I (2008) The semi-continuous quadratic mixture design problem: Description and branch-and-bound approach. Eur J Oper Res 191(3):803–815
Horst R (1997) On generalized bisection of n-simplices. Math Comput 66(218):691–698
Ibaraki T (1976) Theoretical comparisons of search strategies in branch and bound algorithms. Int J Comput Inf Sci 5(4):315–344
Mitten LG (1970) Branch and bound methods: general formulation and properties. Oper Res 18(1):24–34
Williams HP (1993) Model building in mathematical programming. Wiley, Chichester
Acknowledgements
This work has been funded by grants from the Spanish Ministry of Science and Innovation (TIN2008-01117) and Junta de Andalucía (P08-TIC-3518 and P11-TIC-7176), in part financed by the European Regional Development Fund (ERDF).
Author information
Authors and Affiliations
Corresponding author
Additional information
Juan F.R. Herrera is a fellow of the Spanish FPU programme. Eligius M.T. Hendrix is a fellow of the Spanish “Ramón y Cajal” contract programme, co-financed by the European Social Fund.
Appendices
Appendix 1: Products
-
RumCoke
Dimension = 3; Raw materials involved = {RM1,RM2,RM4};
Raw material cost = (0.1,0.7,4.0);
Linear constraints:
h 1(x)=−1.5x 1+0.5x 2−0.5x 3≥0.0,
h 2(x)=0.3x 1−0.5x 2−0.3x 3≥0.0;
Quadratic constraints \((g_{i}(x)=x^{T}A_{i} x + b^{T}_{i} x + d_{i} \leq0;\ i=1,2 )\).
-
Case2
Dimension = 3; Raw materials involved = {RM1,RM2,RM3};
Raw material cost = (0.1,0.7,1.0);
Quadratic constraints \((g_{i}(x)=x^{T}A_{i} x + b^{T}_{i} x + d_{i} \leq0,\ i=3,\ldots,7 )\).
-
Case3
Dimension = 3; Raw materials involved = {RM1,RM2,RM4};
Raw material cost = (0.1,0.7,4.0);
Quadratic constraints \((g_{i}(x)=x^{T}A_{i} x + b^{T}_{i} x + d_{i} \leq0,\ i=7,\ldots, 10 )\).
-
Case4
Dimension = 3; Raw materials involved = {RM2,RM3,RM4};
Raw material cost = (0.7,1.0,4.0);
Quadratic constraints \((g_{i}(x)=x^{T}A_{i} x + b^{T}_{i} x + d_{i} \leq0,\ i=2,7,9,11 )\).
-
UniSpec1-5
Dimension = 5; Raw materials involved = {RM5,RM6,RM7,RM8,RM9};
Raw material cost = (114,115,107,127,115);
Linear constraint:
h 3(x)=0.1493x 1+0.6927x 2+0.4643x 3+0.7975x 4+0.5967x 5≥0.35;
Quadratic constraints \((g_{i}(x)=x^{T}A_{i} x + b^{T}_{i} x + d_{i} \leq0,\ i=12,\ldots,14 )\).
-
UniSpec5b-5
Dimension = 5; Raw materials involved = {RM5,RM6,RM7,RM8,RM9};
Raw material cost = (114,115,107,127,115);
Quadratic constraints \((g_{i}(x)=x^{T}A_{i} x + b^{T}_{i} x + d_{i} \leq0,\ i=15,\ldots,18 )\).
-
Quadratic constraints
A 1[3×3]=(0,−16,0,−16,0,0,0,0,0);
b 1[3×1]=(8,8,0);d 1=−1
A 2[3×3]=(10,0,2,0,0,0,2,0,2);
b 2[3×1]=(−12,0,−4);d 2=3.7
A 3[3×3]=(0.001,−0.001,0.0085,−0.001,0.008,−0.0105,0.0085,−0.0105,−0.021)
b 3[3×1]=(−0.0145,−0.0205,0.073); d 3=−0.0165
A 4[3×3]=(−0.004,0.0005,0.002,0.0005,−0.001,−0.003,0.002,−0.003, 0.014)
b 4[3×1]=(0.0155,0.0515,−0.121); d 4=−0.006
A 5[3×3]=(20.605,−5.087,−10.9885,−5.087,32.003,−43.476,−10.9885, −43.476, −81.278)
b 5[3×1]=(0.1995,−0.097,126.7685); d 5=−20.5063
A 6[3×3]=(0.766,−0.1205,2.4735,−0.1205,0.528,1.9835,2.4735,1.9835,−7.822)
b 6[3×1]=(−2.432,−15.191,10.712); d 6=3.21125
A 7[3×3]=(116.75,−3.09,168.553,−3.09,−67.424,515.114,168.553,515.114,−845.215)
b 7[3×1]=(−287.43,−645.926,354.537); d 7=115.0953
A 8[3×3]=(1.0,3.0,−0.5,3.0,−5.0,−3.5,−0.5,−3.5,−2.0)
b 8[3×1]=(0.832,0.832,0.832); d 8=0.968
A 9[3×3]=(2.0,−1.5,1.0,−1.5,1.0,−1.0,1.0,−1.0,3.0)
b 9[3×1]=(0.12,0.12,0.12); d 9=−1.60
A 10[3×3]=(4.0,−1.5,−1.5,−1.5,4.0,−2.5,−1.5,−2.5,4.0)
b 10[3×1]=(−0.026,−0.026,−0.026); d 10=−2.141
A 11[3×3]=(4.0,−1.0,−2.0,−1.0,5.0,−3.0,−2.0,−3.0,4.0)
b 11[3×1]=(−0.019,−0.019,−0.019); d 11=−2.631
A 12[5×5]=(−1.473, 8.215, −27.204, 46.119, 2.059, −11.929, −12.768, 8.215, 37.733346, 5.127, 95.691, 34.954, 20.165, 19.445, −27.204, 5.127, −21.743, 36.843, −7.126, 4.029, −4.152, 46.119, 95.691, 36.843, 189.643, 93.359, 52.904, 54.802, 2.059, 34.954, −7.126, 93.356, 31.885, 7.528, 10.248, −11.929, 20.165, 4.029, 52.904, 7.528, 11.951, 10.964, −12.768, 19.445, −4.152, 54.802, 10.248, 10.964, 7.197)
b 12[5×1]=(4.5675, 34.7289, 70.5707, −82.2761, 29.3169); d 12=−35
A 13[5×5]=(1.35, −4.41, 17.60, −92.45, 2.74, −29.94, −14.05, −4.41, −39.13, −6.11, −126.38, −29.81, −63.42, −43.97, 17.60, −6.11, 15.45, −76.60, 5.93, −44.05, −20.54, −92.45, −126.38, −76.60, −240.64, −117.46, −125.18, −114.98, 2.74, −29.81, 5.93, −117.46, −22.90, −47.37, −30.68, −29.94, −63.42, −44.05, −125.18, −47.37, −73.39, −73.99, −14.05, −43.97, −20.54, −114.98, −30.68, −73.99, −55.33)
b 13[5×1]=(−2.1232, −9.0403, −42.2072, 190.5292, −9.9529); d 13=10
A 14[5×5]=(−0.670, 4.284, −12.837,23.708, 1.677, −8.964, −4.859, 4.284, 21.380, −1.188, 28.990, 13.216, 17.177, 16.620, −12.837, −1.189, −21.376, 9.841, −7.298, −10.043, −8.981, 23.708, 28.990, 9.841, 49.385, 25.574, 15.561, 21.666, 1.677, 13.216, −7.298, 25.574, 8.419, 4.149, 6.595, −8.965, 17.177, −10.043, 15.561, 4.149, 1.090, 6.292, −4.859, 16.620, −8.981, 21.666, 6.594, 6.292, 5.906)
b 14[5×1]=(0.7097, −13.0982, 27.5078, −49.1608, −7.3725); d 14=−2
A 15=−A 12; b 15=−b 12; d 15=45
A 16=−A 13; b 16=−b 13; d 16=−21
A 17[5×5]=(0.0, −11.556, −1.114, 14.690, −11.411, 0.121, −0.150, −11.556, −3.316, −2.116, 7.313, −8.800, 19.897, 9.051, −1.114, −2.116, 4.728, 16.250, −4.535, 18.319, 11.537, 14.690, 7.313, 16.250, 40.428, 9.766, 21.512, 15.266, −11.412, −8.800, −4.535, 9.766, −10.165, 10.088, 1.889, 0.121,19.897, 18.319, 21.511, 10.088, 28.569, 27.239, −0.150,9.051, 11.537, 15.266, 1.889, 27.239, 19.965)
b 17[5×1]=(1.7278, 23.5166, 5.6724, −32.0798, 19.0154); d 17=−5
A 18=A 14; b 18=b 14; d 18=−1
Appendix 2: Linear and quadratic feasibility
-
Linear infeasibility
If for one of the linear constraints h i (x)≤0 all vertices are infeasible (h i (v k,s )>0, s=1,…,t k ), then C k does not fulfil h i (x)≤0.
-
Quadratic infeasibility
Given a simplex C k ∈Λ j and the set of quadratic constraints {g i (x)≤0, i=1,…,m j }, C k can be rejected if ∀x∈C k ∃ i:g i (x)>0.
Around each vertex v k,s , s=1,…,t k , a so-called infeasibility sphere B k,s is defined:

B k,s cannot contain a feasible point. Different ways of calculating values of radii ρ k,s are described in Casado et al. (2007).
If none of the vertices of C k is feasible, the spheres can be used to prove that C k cannot contain a feasible quadratic solution. The following tests to prove the infeasibility of simplex C k are used by the following Algorithm 1:
- SCTest:
-
(Single Cover Test). One of the spheres B k,s with radius ρ k,s , s=1,…,t k , covers the simplex completely, i.e. C k is proved infeasible if there exists a vertex v k,s such that ρ k,s >max z ∥v k,s −v k,z ∥, z≠s, z=1,…,t k .
- MCTest:
-
(Multiple Cover Test). A simplex C k which is not covered by a single sphere B k,s can still be covered by \(\bigcup_{s=1}^{t_{k}} B_{k,s}\). In Casado et al. (2007), it is proven that if a mixture x∈C k is covered by all spheres, i.e. \(x \in\bigcap_{s=1}^{t_{k}}B_{k,s}\), then \(C_{k} \subset\bigcup_{s=1}^{t_{k}} B_{k,s}\). This means that all the possible mixtures in C k are covered by at least one sphere B k,s , and consequently C k is infeasible.
- PCTest:
-
If the SCTest and MCTest fail, Algorithm 1 focuses on the infeasibility sphere centred at a generated interior point. If it is shown to be infeasible for at least one of the constraints, a new infeasibility sphere is generated. The advantage of using an interior point is that its distance to the farthest vertex is smaller than the largest distance in between two vertices of the simplex.
-
ε-Infeasibility
The ε-robustness requirement gives the opportunity to reject a simplex C k that is close enough to an infeasible solution. A simplex C k with an infeasible point x such that max s ∥x−v k,s ∥<ε cannot contain an ε-robust solution.
Rights and permissions
About this article
Cite this article
Herrera, J.F.R., Casado, L.G., Hendrix, E.M.T. et al. Pareto optimality and robustness in bi-blending problems. TOP 22, 254–273 (2014). https://doi.org/10.1007/s11750-012-0253-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11750-012-0253-9