
Abstract
This paper focuses on the direct current - alternating current (DC-AC) interfaced microsource based H∞ robust control strategies in microgrids. It presents detail of a DC-AC interfaced microsource model which is connected to the power grid through a controllable switch. A double loop current-regulated voltage control scheme for the DC-AC interface is designed. In the case of the load disturbance and the model uncertainties, the inner voltage and current loop are produced based on the H∞ robust control strategies. The outer power loop uses the droop characteristic controller. Finally, the scheme is simulated using the Matlab/Simulink. The simulation results demonstrate that DC-AC interfaced microsource system can supply high quality power. Also, the proposed control scheme can make the system switch smoothly between the isolated mode and grid-connected mode.
Similar content being viewed by others
1 Introduction
For economic, technical and environmental reasons, the microgrid, powered by microsource, such as fuel cells[1], photovoltaic cells, and microturbines, is becoming widely used[2–3]. The microgrid concept refers to a system which coordinates local level energy supply and demand. It provides a platform for the integration of various distributed energy resources through a communication system enabling control actions. The microgrid can be connected to an upper level utility power grid, but it is also capable of operating in a disconnected island mode.
The consortium for electric reliability technology solutions (CERTS) microgrid concept is driven by the following principles[4]:
-
1)
A systems perspective is necessary for customers, utilities, and society to capture the full benefits of integrating distributed energy resources into an energy system;
-
2)
The business case for accelerating adoption of these advanced concepts will be driven, primarily by lowing the cost and enhancing the value of microgrids.
In the actual operation of microgrids, the key issue is control of the DC-AC interfaced microsource[5,6]. The DC-AC interface is used to connect the microsource to the utility grid. It is important[7] as:
-
1)
It improves power quality by providing extremely fast switching times for sensitive loads;
-
2)
It provides reactive power control and voltage regulation at the microgrids system connection point;
-
3)
It reduces or eliminates fault current effect on micro-grids system, thereby, it allows negligible impacts on protection coordination;
-
4)
It provides flexibility in operations with various other microgrids sources, and reduces overall interconnection costs through standardization and modularity.
The operation and control of a DC-AC interfaced microsource present great challenge for the microgrids. Particularly smooth switching between the isolated mode and grid-connected mode has to be carefully designed in the case of voltage and frequency fluctuations. Also, the control of electrical generator and DC-AC interface will play an important role in the overall control system in microgrid. Different from the conventional large power system, there are not grid voltage and frequency to reference. In this case, the control and operation of DC-AC interface become a great concern in such system design.
There are many control schemes for the power electronic interfaced microsource[8–12]. Brabandere et al.[8] discussed the voltage and frequency control operations are particularly discussed. They also implemented control concepts of microgrids. Besides, Brabandere et al.[9] described a voltage and frequency droop control method for parallel operation of inverters operating in an island grid or connected to an infinite bus. A detailed analysis shows that this approach has a superior behavior compared to the existing methods. Also, a detail of H ∞ repetitive control of DC-AC converters in microgrids is given in [10]. The repetitive control is used to reject harmonic disturbances from nonlinear loads or the public grid, and H ∞ method is to ensure that the controller performs effectively with a range of local load impedances. Serban et al.[11] proposed a control strategy for a distributed power generation microgrid application. Feng and Chen[12] presented the control strategy of power electronics interfaced distribution generation units.
This paper proposes an H ∞ robust[13–15] control scheme for DC-AC interfaced microsource. For the purpose of designing this control scheme, the system powers are firstly obtained via required voltage and frequency. Based on three-phase grid-connected power system model, which is developed for the overall power system including the DC-AC interface, the control scheme is designed as a double loop current-regulated voltage control. In this research, one of the critical challenges was to make the system switch smoothly between the isolated mode and grid-connected mode. The overall system, consisting of a microsource with DC-AC interface, is simulated in the Matlab/Simulink. The performance of the double loop control scheme was thoroughly tested and analyzed by the simulation study, and is systematically presented in the paper.
2 System modeling
2.1 A three-phase grid-connected DC-AC interfaced system
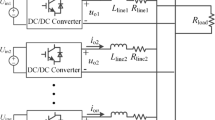
Fig. 1 shows the system to be controlled. This system consists of microsource, DC-AC inverter (IGBT bridge), LCL filters, the local consumers, controllable switch and the power grid. The DC-AC inverter is used to transform the direct current into alternating current. The LCL filter connected at the inverter terminals are to filter out the harmonics at the switching frequency 4 kHz. The controllable switch can make the microgrid connect or disconnect to the power grid. The microgrid connects to the power grid through the transformer.

Three-phase grid-connected power system diagram
2.2 The state-space model of the power system
The state-space model of the island microgrid is
where u inv is output voltage of the inverter, i 1 is output current of the inverter, u c is voltage of the filter capacitor, i 2 is current of the load, L 1 , L 2 , C are capacitance and inductance of the filter. The output equation is
where u ref is reference voltage. Equations (1) and (2) represent the system model and output in state space variables, which can be shown in the following matrix form
where
In an actual power system, the nonlinear load, phase asymmetry and other factors must be taken into account. Here, we introduce the parametric uncertainty. We consider the major parameter R as ∆R, (3) can be generalized as
The uncertainty matrix is
where η(t) = ∆RL 2. For the purpose of illustration, the parametric perturbation is considered as ∆R = 0.15R.
3 Controller design
From the state-space model mentioned above, it is obvious that the essential task is to control the output voltage at required magnitude and frequency.
Fig. 2 shows the complete control system of the microsource. The inputs of the control system are either measurements (e.g., the voltages and currents) or set points (e.g., voltage, power and the nominal grid frequency). The outputs are the gate pulses that describe when and for how long the power electronic devices are going to conduct. The inverter voltage and current along with the load voltage are measured. The voltage magnitude at the load bus and the active power injected are then calculated.

Final version of microsource control
As shown in Fig. 2, V abc is the root mean square (RMS) line-to-neutral voltage, i abc is the RMS line current, V ab , V bc , V ac are line-to-line voltage, i a , i b , i c are line current, P and Q are the calculated active power and reactive power. The controller of the inverter is a double-loop controller. In this control strategy, the inner loop is a voltage and current regulation loop, and the outer loop is a power regulation loop. First, V ab , V bc , V ac and i a , i b , i c are measured, and through the power calculation module we can obtain the active power P and reactive power Q. Then, we analyze the f–v characteristic, and gain the voltage phase angle ω and magnitude v. Finally, the reference voltage u ref is calculated. Here, we use the H ∞ controller to regulate the inner voltage and current loops, and use the droop characteristic controller for the outer loop. This paper mainly describes the design of the H ∞ controller, which is designed in the subsequent section.
3.1 Power calculation
The power calculation module is used to calculate the values of active and reactive power. In order to complete the calculation, we will use the instantaneous values of line to line voltages and line currents. These quantities can be brought in from the measuring equipment. The voltages are always measured across the phases in case that there is no ground to refer to. We should measure only two of the line to line voltages and calculate the third one from the fact that the sum of the three delta voltages must equal zero, in balanced as well as under unbalanced conditions. With respect to the currents, we should only measure two currents and the third one is calculated assuming their overall sum is zero, but which is correct only under balanced conditions.
The calculation of P and Q are
One advantage of adopting (5) is that the variables are readily available, such as voltages denote the line to line voltage so that there is no need to convert them to line to neutral. Another advantage is the simplicity of the equations that do not require the extra step of being converted to rotating frame components, since the powers are evaluated from the immediately available time domain quantities obtained from the sensing equipment.
3.2 f &v characteristic
This section will give the detail of f–v droop characteristic and the selection of the voltage-frequency drop coefficients m and n. Chandorker et al.[16] proposed a method to regulate the power-frequency (P, ω) characteristic and reactive power-voltage (Q–v) characteristic. This method can make each microsource supply active and reactive power in proportion with its power rating. The equations are
where the droop coefficients m and n can expressed as
where ω 0 is the operation frequency when there is no load in the system (p 0 = 0), p max , ω min are the maximum active power output of microsource system and the minimum operation frequency. v 0 is the initial value of voltage magnitude, it is set as 318.2V (225 V phase voltage). Q 0 is the initial reactive power, it is set as zero. Q max, v min are the maximum reactive power output of microsource system and the minimum voltage magnitude.
Then, the three-phase reference voltage can be expressed as
3.3 H ∞ robust controller design
This section will design the H ∞ robust controller. The state-space model of the system is (4), which is showed in Section 2.
Assumption 1. The parameter uncertainty ∆A satisfies the matching condition:
where E and F are the constant real matrices with appropriate dimensions, and Σ(t) is an unknown function matrix and satisfies ΣT(t)Σ(t) ≤ I, in which I is a unit matrix. According to Assumption 1, the parameter uncertainties can be expressed as
For system (6), we consider the state feedback
The closed-loop system is obtained as
Define Lyapunov function of this system as
where P is a symmetric positive definite weighting matrix.
Without considering the initial condition, the performance of H ∞ is related to the transfer function T z ω(s) in the following form
where γ is a constant representing prescribed attenuation level. T zω(s) is the transfer function from ω(t) to z(t).
Theorem 1. The control system of (4) has a state feedback controller to make the closed-loop system (10) asymptotically stable and possess the control performance in (11), if and only if P = P T > 0 satisfies the following matrix inequality
where P is a symmetric positive definite weighting matrix, Â = A + BK +EΣ(t)F.
Proof. Let us left multiply and right multiply diagonal matrix diag {γ1/2 I,γ 1/2 I, γ −1/2 I} into the matrix inequality (12), and denote X = γP > 0, then the equivalent inequality is changed as follows
Then, we obtain  T X + X < 0, so system (4) is asymptotically stable, and V (t) = x T(t)Xx(t) is a Lyapunov function for the system (4). We select an appropriate constant 0 < λ < 1 satisfying the following matrix inequality
By the Schur complement theorem, the above inequality (14) is equivalent to (15)
For any T > 0, consider
Under the zero initial state conditions,
From above calculation result and (15), we can obtain
Take the advantage of the zero initial state conditions again, the calculation result of the above inequality is as
By the asymptotic stability of the system and ω ∈ L 2[0, 00), let T → ∞ in above inequality, we can obtain
The above inequality is equivalent to (11).
In (12), Σ(t) is an unknown matrix function, we should deal with the parameter uncertainty problem as follows. Lemma 1. For matrices (or vectors) Y, D and E with appropriate dimensions, we have
where Y is a symmetric matrix. For all F satisfying F T F < I, if and only if a set of scalar quantity ε > 0 exists, we gain
Theorem 2. The system (10) is asymptotically stable by the control action as (9) and it possesses the H ∞ controller performance in (11) for a prescribed γ, if and only if a set of scalar quantity β > 0 and P = P T > 0 satisfies the following matrix inequality.
where Φ = P(A+ BK)+(A +BK T P.
Proof. Denote
By the equation
the matrix inequality (12) is equivalent to
According to Lemma 1, for all Σ(t) satisfying ΣT(t)Σ(t) ≤ I, if and only if a set of scalar quantity β > 0 exist, the following inequality is satisfied
By the Schur complement, the above inequality is equivalent to (16).
Remark 1. In order to obtain better robust performance, the H ∞ control performance can be treated as the following minimization problem so that the performance of H ∞ in (11) is reduced as small as possible.
The above minimization problem (18) can be transformed into LMI problem. Then, we can use the convex optimization techniques of LMI in Matlab toolboxes to design the controller.
4 Simulation results
The simulation studies have been performed. The simulation parameters are listed in Table 1.
In order to investigate the performance of the proposed controller in response to OR against sudden changes within an islanded network, simulation examples are given in this section. Initially, microgrid was connected to the power grid and worked in the grid-connect mode. At t = 3, the microgrid broke away from the power grid and worked in the isolated mode.
The simulation results are shown in Fig.3. Figs. 3(a) and (b) reflect the power changes during the period when the microgrid is broken away from the distribution network. Initially, the microgrid absorbed partial active power from the grid, so when it was broken away from the grid, the active power output by the microsource was increased. According to Fig. 3 (c), we know the load voltage is still in stable condition. In Fig. 3 (d), the frequency decreased in the case of the active power increase. According to the results, we draw the conclusion that the control scheme can make the system switch smoothly from the isolated mode to grid-connected mode.

Response curves when microsouce is disconnected
At t = 4.5, the microgrid reconnected to the power grid and worked in the grid-connected mode again. The simulation results are shown in Fig. 4.

Response curves when microsouce is reconnected
Figs. 4(a) and (b) reflect the active power was decreased and the reactive power was increased during the period when the microgrid was reconnected with the distribution network. According to Fig. 4 (c), we know the load voltage is still in stable condition. In Fig. 4 (d), the frequency increased in the case of the active power decreased. According to the results, we draw the conclusion that the control scheme can make the system switch smoothly from the grid-connected mode to isolated mode.
5 Conclusions
This paper has presented a detailed study of a microgrid system connected with DC-AC interface. A double loop control system for the interface is developed. The H ∞ control scheme is designed including the inner voltage/current loop and the outer droop characteristic based power loop. The control performance of the proposed DC-AC interfaced microsource was tested through simulation examples in the Matlab/Simulink software environment. The results show that it is possible to use DC-AC interfaced microsource system to supply high-quality power.
References
J. G. Williams, G. P. Liu, S. C. Chai, D. Rees. Intelligent control for improvements in PEM fuel cell flow performance. International Journal of Automation and Computing, vol. 5, no.2, pp. 145–151, 2008.
R. H. Lasseter, P. Piagi. Microgrid: A conceptual solution. In Proceedings of the 35th Annual Power Electronics Specialists Conference, IEEE, Aachen, Germany, pp. 4285–4290, 2004.
D. Georgakisl, S. Papathanassiou, N. Hatziargyriou, A. En-gler, C. Hardt. Operation of a prototype microgrid system based on micro-sources quipped with fast-acting power electronics interfaces. In Proceedings of the 35th Annual Power Electronics Specialists Conference, IEEE, Aachen, Germany, pp.2521–2526, 2004.
P. Piagi, R. H. Lasseter. Autonomous control of microgrids. In Proceedings of the IEEE Power Electronics Specialists General Meeting, IEEE, Montreal, Que, Canada, pp. 8–16. 2006.
R. Caldon, F. Rossetto, R. Turri. Analysis of dynamic performance of dispersed generation connected through inverter to distribution networks. In Proceedings of the17th International Conference on Electricity Distribution, CIRED, Barcelona, Spain, pp. 1–5, 2003.
S. Barsali, M. Ceraolo, P. Pelacchi, D. Poli. Control techniques of dispersed generators to improve the continuity of electricity. In Proceedings of IEEE Power Engineering Society Winter Meeting, IEEE, New York, USA, pp.789–794, 2002.
B. Kroposki, C. Pink, R. DeBlasio, H. Thomas, M. Simoes, P. K. Sen. Benefits of power electronic interfaces for distributed energy systems. In Proceedings of IEEE Power Engineering Society General Meeting, IEEE, Montreal, Que, Canada, pp. 901–907, 2006.
K. De Brabandere, K. Vanthournout, J. Driesen, G. Decon-inck, R. Belmans. Control of microgrids. In Proceedings of IEEE Power Engineering Society General Meeting, IEEE, Tampa, Florida, USA, pp. 1–7, 2007.
K. De Brabandere, B. Bolsens, J. Van den Keybus, A. Woyte, J. Driesen, R. Belmans. A voltage and frequency droop control method for parallel inverters. IEEE Transactions on Power Electronics, vol. 22, no. 4, pp. 1107–1115, 2007.
G. Weiss, Q. C. Zhong, T. C. Green, J. Liang. H∞ repetitive control of DC-AC converters in microgrids. IEEE Transactions on Power Electronics, vol. 19, no. 1, pp. 219–230, 2004.
E. Serban, H. Serban. A control strategy for a distributed power generation microgrid application with voltage- and current-controlled source converter. IEEE Transactions on Power Electronics, vol. 25, no. 12. pp. 2981–2992, 2010.
D. Feng, Z. Chen. System control of power electronics interfaced distribution generation units. In Proceedings of the 5th CES/IEEE International Power Electronics and Motion Control Conference (IPEMC), IEEE, Shanghai, China, pp. 1–6, 2006.
X. D. Hao, Q. S. Zeng. H∞ output feedback control for stochastic systems with mode-dependent time-varying delays and Markovian jump parameters. International Journal of Automation and Computing, vol. 7, no. 4. pp. 447–454, 2010.
Y. G. Chen, W. L. Li. Improved results on robust H∞ control of uncertain discrete-time systems with time-varying delay. International Journal of Automation and Computing, vol. 6, no. 1, pp. 103–108, 2009.
S. Xin, Q. L. Zhang, C. Y. Yang, Z. Su, Y Y. Shao. An improved approach to delay-dependent robust stabilization for uncertain singular time-delay systems. International Journal of Automation and Computing, vol. 7, no.2, pp. 205–212, 2010.
M. C. Chandorkar, D. M. Divan, R. Adapa. Control of parallel connected inverters in standalone AC supply systems. IEEE Transactions on Industry Applications, vol. 29, no. 1, pp. 136–143, 1993.
Acknowledgements
The authors express their sincere gratitude to the reviewers for their constructive suggestions which help improve the presentation of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Chun-Xia Dou received the B.Sc. degree, the M. Sc. degree, and the Ph. D. degree from the Yanshan University, Qin-huangdao, China. She is currently a professor at the Institute of Electrical Engineering, Yanshan University.
Her research interests include control for smart grid, control for microgrid, and stability of wide-area power systems.
Fang Zhao received the B.S. degree from the Inner Mongolia University of Technology, Hohhot, China in 2009. She is currently a master student in the Institute of Electrical Engineering, Yanshan University, Qinhuangdao, China.
Her research interests include switched systems control and microsource control.
Xing-Bei Jia received the B.Sc. degree from the Yanshan University, Qinhuang-dao, China, in 2009. She is currently a master student in the Institute of Electrical Engineering, Yanshan University, Qin-huangdao, China.
Her research interests include optimization control, adaptive control, and transient stability control for power systems.
Dong-Le Liu received the B.Sc. degree from the Yanshan University, Qinhuang-dao, China in 2009. He is currently a master student in the Institute of Electrical Engineering, Yanshan University, Qinhuang-dao, China.
His research interests include control for wind power systems and adaptive control.
Rights and permissions
About this article

Cite this article
Dou, CX., Zhao, F., Jia, XB. et al. H∞ Robust Control of DC- AC Interfaced Microsource in Microgrids. Int. J. Autom. Comput. 10, 73–78 (2013). https://doi.org/10.1007/s11633-013-0698-9
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-013-0698-9