
Abstract
The ellipsoid shape model plays an important role in physical research on asteroids. However, its symmetric structure cannot practically simulate real asteroids. This article applies a general shape model, named the cellinoid, instead of the ellipsoid model to simulate the asymmetric shape of asteroids. The cellinoid shape model consists of eight octants of ellipsoids having different semi-axes, with the constraint that adjacent octants must have two equal semi-axes in common. Totally, the shape of the cellinoid model is controlled by six parameters, not three as in the case of the shape of the ellipsoid. Using this shape model, the brightness of asteroids observed from the Earth can be fitted numerically by the surface triangularization of the cellinoid. The Levenberg–Marquardt algorithm is also employed here to solve a nonlinear minimization problem. Owing to the asymmetric shape of the cellinoid, the physical parameters of asteroids, such as the rotation period and pole orientation, can be fitted more accurately than in the case of the ellipsoid model. Finally, this is confirmed numerically by applying the shape to both synthetic light curves and real light curves of asteroids. Additionally, the center of mass and moment of inertia of the cellinoid are analyzed explicitly.
Similar content being viewed by others


1 Introduction
With the development of telescope technology and the increase in the number of ground-based observatories, more and more asteroids are being observed and their photometric data, such as light curves, recorded. Most asteroids are simply too small and faint to allow us to resolve their disks by means of remote observations. A very useful technique to learn about them is to investigate their variation in observed brightness with respect to the observation time and position. From the light curves of asteroids, physical parameters, such as the rotation period, pole orientation and shape, can be estimated.
Russell was the first to research the inversion of the shape of asteroids from light curves Russell (1906). However, he thought that the light curves when asteroids are in opposition were insufficient for the reconstruction of the shape models of asteroids. Later, as many asteroids were observed in a variety of observation geometries, it become evident that the inverse problem can be solved in many cases. Surdej et al. simulated the rotation of an asteroid using a three-axis ellipsoid model and presented synthetic light curves based on the scattering laws of Lambert and Lommel-Seeliger Surdej and Surdej (1978). To simulate the scattering law of asteroids better, Lumme et al. (1981a, b) took many sophisticated parameters, such as the single-scattering albedo, the asymmetric factor, volume density of the surface material and the roughness of the surface, into account. Furthermore, Hapke considered the bidirectional reflectance and shadow of the particles of the surface Hapke (1984). Employing the Lumme–Bowell scattering law, Karttunen (1989) introduced a method of generating light curves of asteroids under the assumption that asteroids are ellipsoids. Additionally, he tested the effects of the scattering parameters on light curves and concluded that the variation in the brightness of light curves depended strongly on body shape, not the scattering law Karttunen and Bowell (1989). Because ellipsoids have symmetric shape, the light curves generated by an ellipsoid model are also symmetric. To simulate real asteroids better, Cellino et al. (1989) introduced a general shape model, which consists of eight octants of ellipsoids having different semi-axes, with the constraint that adjacent octants must have two equal semi-axes in common. They described how this asymmetric shape can generate irregular light curves that are closer to observed ones, but they did not present an inverse method with which to derive the related parameters of asteroids from observed light curves. We call this shape a ‘cellinoid’ for the first time in this article and using this shape model, present an inverse method with which to fit the related physical parameters of one asteroid from several light curves observed in one apparition.
As the computer techniques have developed rapidly, it has become feasible to solve the inverse process, in which the physical parameters of asteroids are obtained from light curves. Lumme et al. (1990) attempted to find the pole orientation employing a spherical harmonics method, independent of the shape model and albedo variation. Kaasalainen presented an efficient method of reconstructing an arbitrary surface of asteroids Kaasalainen and Lamberg (1992, 1992) and a numerical application with a simple scattering law Kaasalainen and Torppa (2001), Kaasalainen et al. (2001, 2005), which was verified in the laboratory. According to results obtained with many light curves observed for various geometries, Kaasalainen’s method is efficient in computing the shape of asteroids and other related parameters. Furthermore, a method of accelerating the algorithm has been described Kaasalainen et al. (2012). For most asteroids, however, it is difficult to collect the full light cuves for required geometries. In particular, many asteroids barely have one apparition over a period of several decades. Additionally, many space projects, such as GAIA, only collect sparse photometric data of asteroids. It is not possible to construct a complicated shape model when there are few complete light curves. Cellino et al. (2009) applied sparse photometric data to search for the physical parameters of asteroids based on an ellipsoid shape. This is an important reason why the ellipsoid model is still applied in estimating the related parameters of asteroids. Lu et al. (2013) presented a fast method of using an ellipsoid model for asteroids to efficiently derive the related parameters. Using this method, we extend the fast ellipsoid model and apply the cellinoid shape model to estimate the parameters of asteroids from light curves observed in one apparition.
Using a definition similar to that employed in the fast ellipsoid model, we introduce the cellinoid shape model and numerically apply it to light curves as follows. Section 2 describes the cellinoid shape model and explicitly analyzes its center of mass and moment of inertia. Additionally, a simple scattering law and the whole inverse problem are presented. Numerical applications are then presented in Sect. 3. First, the cellinoid model is applied to synthetic light curves and the process of searching for the best-fit parameters is introduced step by step. Second, a similar process is applied to real asteroid 3 JUNO and solutions derived with the ellipsoid model and cellinoid model are compared. Third, the cellinoid shape model is applied to another real asteroid 21 LUTETIA. Finally, the study is summarized and future work discussed in Sect. 4.
2 Cellinoid Shape Model
Based on the ellipsoid model, the cellinoid shape model consists of eight octants from eight different ellipsoids, with the constraint that adjacent octants must have two equal semi-axes. The upper four octants are listed as follows.
The lower four octants are listed as follows.

Cellinoid shape model

Triangularization of octant
The cellinoid shape with six parameters \(a_1,a_2,b_1,b_2,c_1,\) and \(c_2\) is shown in Fig. 1. With three more degrees of freedom than the ellipsoid shape, the cellinoid shape can be asymmetric, although its surface is not smooth at the boundaries of adjacent octants. It is apparent that the cellinoid shape reduces to an ellipsoid with three axes when \(a_1=a_2,\, b_1=b_2,\) and \(c_1=c_2\). Because each octant of the cellinoid shape is taken from an ellipsoid, the related algorithm based on ellipsoids can be easily extended to the cellinoid shape. In this article, we primarily introduce how to obtain the related physical parameters of asteroids, such as rotation period, pole orientation and shape, under the assumption of the cellinoid shape model, instead of the ellipsoid shape model.
2.1 Characteristics of the Cellinoid Shape
The basic physical characteristics of the cellinoid shape will be analyzed under the assumption that the volume density \((\rho )\) is uniform. The related physical formulas for the mass and center of mass will be shown explicitly followed by the formulas for the inertia tensor and the stable free rotational axis. These formulas will be exploited in the next section to simulate the brightness of asteroids.
2.1.1 Mass of the Cellinoid Shape
As the cellinoid shape consists of eight octants taken from ellipsoids, all its physical properties can be transformed into properties for the eight octants. For simplicity, only the calculation for octant \(U1\) will be presented in detail.
By employing the generalized transformation from Cartesian coordinates to spherical coordinates,
the mass of octant \(U1\) can be calculated as
In a similar calculation, the total mass \(M\) of the cellinoid shape is
As is well known, the volume of an ellipsoid with three semi-axes \((a, b, c)\) is \(\frac{4\pi a b c}{3}\). This is consistent with the result in (11) when simply letting \(a_1=a_2=a,\, b_1=b_2=b\), and \(c_1=c_2=c\).
2.1.2 Center of Mass of the Cellinoid Shape
The detailed process of determining the center of mass \(G_{U1}(\bar{x},\, \bar{y},\, \bar{z})\) for octant \(U1\) is
Finally, with the derived centers of mass and masses of the eight octants, the center of mass \(G(\bar{x}, \bar{y}, \bar{z})\) of the cellinoid can be calculated for the particle system in the form,
2.1.3 Inertia Tensor and Rotational Axis of the Cellinoid Shape
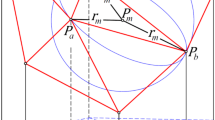
Generally, a rigid body will rotate stably about the axis of maximum moment of inertia. Supposing \(\varvec{\eta }=(\eta _x, \eta _y, \eta _z)^T\) be a unit direction vector, the moment of inertia \((I_O)\) rotating about the line with direction \(\varvec{\eta }\) and passing through the origin \(O\) can be calculated in the form
where \(I_G\) is the moment of inertia rotating about the line with the direction \(\varvec{\eta }\) and passing through the center of mass \(G\) of the cellinoid. Equation (14) is the parallel-axis theorem for a mass \((M)\) and perpendicular distance \((\bar{r})\) between two straight lines with the same direction \(\varvec{\eta }\) passing through \(O\) and \(G\).
It is easy to compute the distance \(\bar{r}\) by taking the cross product of vector \(\overrightarrow{OG}\) and unit vector \(\varvec{\eta }\):
Following the definition of \(B\),
Furthermore, the moment of inertia \(I_O\) can be calculated as
where \(r\) is the distance between the origin and an arbitrary point in the cellinoid; i.e., \(\overrightarrow{OM}=(x, y, z)\). As the uniform volume density \(\rho\) does not affect the center of mass, we set it as 1 for simplicity. The moment of inertia \(I_O\) then has the form
Here \(A\) denotes the matrix
where
Combining Eqs. (14, 15, 18), the moment of inertia \((I_G)\) passing the center of mass is derived as
The matrix \((A-MB)\) is the inertia tensor of the cellinoid passing the center of mass, and is called the tensor matrix.
The moment of inertia \((I_G)\) is a quadratic form that defines the surface of an ellipsoid, called the inertia ellipsoid. Finding the stable rotational axis of the cellinoid is equivalent to determining the principal axes of the inertia ellipsoid; i.e., the diagonalization of tensor matrix \((A-MB)\). As a real symmetric matrix, the tensor matrix has an eigen decomposition of an orthogonal matrix \(Q\) and a diagonal matrix \(\varSigma\) given by
where \(I_1 \le I_2 \le I_3\) are the eigenvalues. The columns of matrix \(Q\) defines the directions of the principal axes. The cellinoid will stably rotates about the direction with the maximum eigenvalue.
2.2 Process of Searching for Physical Parameters
To simulate the observed brightness of asteroids, a rational scattering law has to be established. As mentioned previously, many sophisticated scattering laws have been designed, such as those models presented by Lumme-Bowell and Hapke. Nevertheless, the scattering law is not the main factor affecting the variation in brightness as asteroids spin, but the shape is. Combining the scattering laws of Lommel-Seeliger and Lambert with a weight factor \(c\) for the latter, Kaasalainen introduced a simple function (22) to represent the scattering law and confirmed its validity in the laboratory Kaasalainen et al. (2001, 2005) :
Here \(\mu ,\,\mu _0\) are defined under the definition of \(\eta (\vartheta ,\,\varphi )\), the outward unit normal vector of the surface, and \(\omega , \omega _0\), the directions to the Earth and the Sun as observed from the asteroid respectively:
The phase function \(f(\alpha )\) in (22) is an empirical modeling function presented by Muinonen et al. (2002, 2009), which was interpreted empirically by Kaasalainen et al. (2003). The function has the four-parameter form
where \(\alpha\) is the phase angle, \(a,b\) and \(k\) are the three linear parameters, and \(d\) is a single nonlinear parameter.
With the definition of the scattering law in (22), the whole inverse problem based on an ellipsoid shape model to derive the physical parameters of asteroids was described in detail in Lu et al. (2013). For the cellinoid shape the photometric brightness of asteroids can be calculated as a similar surface integral in the form
where \(C+\) is the part of the surface of the cellinoid shape model that is both illuminated by the Sun and visible from the Earth; i.e., \(\mu , \mu _0>0\). Then by applying triangularization to each octant of the cellinoid, the brightness integral (25) can be discretized as
where \(i\) is the index of octants, \(j\) is the index of triangular facets of each octant and \(\varDelta S_{i,j}\) represents the area of the \(j\)-th facet on the \(i\)-th octant, whose contribution to the total brightness is larger than zero. The triangularization of each octant is shown in Fig. 2. Additionally, the fast method including Lebedev quadrature and derivative formulas, presented in Lu et al. (2013), can be employed to rapidly compute the brightness integral by splitting it into eight simple integrals on the ellipsoidal surface.
Supposing that \(L_i\) denotes the \(i\)-th observed light curves, while \(\tilde{L}_i\) denotes the calculated brightness corresponding to the specified observing geometry, the physical parameters of asteroids can be derived by minimizing
If the observed light curve \(L_i\) is not calibrated (i.e., the brightness is relative), a \(\chi ^2\) form can be employed instead of (27):
where \(<L>\) denotes the mean brightness of one light curve. Generally speaking, the solar phase angle \(\alpha\) of most asteroids, especially for Main Belt Asteroids (MBAs), changes little during one observation lasting a few hours. Therefore, it is reasonable to ignore \(f(\alpha )\) in the scattering law (22) in this case. However, for the sparse data, the phase function \(f(\alpha )\) must be considered.
The Levenberg–Marquardt algorithm is an efficient method of solving the nonlinear optimization problem, but it generally obtains a locally optimal solution, and not the global one. We attempt to introduce a scheme to find the globally optimal solution of the problem (27 or 28). First, fixing the shape and pole, the rotation period \((P)\) and initial phase angle \((\varPhi _0)\) are searched for. An approximate \(P\) and \(\varPhi _0\) with the smallest \(\chi ^2\) are taken as the initial-guess values. Second, with the initial-guess values of \(P\) and \(\varPhi _0\) and various initial pole orientation \((\lambda ,\beta )\), the Levenberg–Marquardt algorithm is employed to search for the best-fit solution with the globally smallest \(\chi ^2\). The detailed process will be shown in the following section by applying the cellinoid shape model to the synthetic light curves and the light curves of real asteroids.
3 Numerical Application
Following the theoretical introduction of the cellinoid shape model, a numerical application will be presented with a detailed process in this section. First, an ideal cellinoid shape with specified physical parameters is employed to generate three synthetic light curves under the scattering law (22). The unit direction of the Earth and Sun are specified as three different unit vectors for the three synthetic light curves. Additionally, because there are not enough light curves, the \(f(\alpha )\) part in the scattering law (22) is ignored to simplify the inverse problem. Moreover, to simulate the observed error generated commonly by signal transmittance, atmosphere and measurement accuracy, 1 % random error is added to the brightness in the three synthetic light curves. The cellinoid shape model is applied to the three synthetic light curves to examine whether the model can be used to search for best-fit parameters that are consistent with known parameters within an acceptable error.
After dealing with the synthetic light curves, we attempt to apply the cellinoid shape to the real asteroid 3 JUNO, because the shape of 3 JUNO is regular owing to its large mass. The fitted light curves of both the cellinoid shape and ellipsoid shape are presented for comparison and the result confirms that the cellinoid shape can simulates the real asteroid better. Finally, we apply the cellinoid shape to another asteroid 21 LUTETIA with an irregular shape and find that the shape model again performs well.
3.1 Application to the Ideal Cellinoid Shape
A specified cellinoid shape model with axes \(a_1=6,\, a_2=4,\, b_1=5,\,b_2=3,\,c_1=3\), and \(c_2=3\) is applied to simulate the asteroid, and three synthetic light curves are generated for the physical parameters \(\lambda =54^\circ ,\, \beta =-17^\circ ,\, P=7h\), and \(\varPhi _0=45^\circ\). The shape model and synthetic light curves are presented in Fig. 3. Unlike the case for real asteroids, the parameters of the shape model are known. Therefore, we present the process of how to search for the parameters step by step taking this model as an example. First, if there is no prior information about the object, a rough search for the rotation period \((P)\) and initial phase angle \((\varPhi _0)\) is needed to provide approximate guesses of \((P, \varPhi _0)\). The purpose of this step is only to obtain appropriate initial values for \(P\) and \(\varPhi _0\) to be used in the Leverberg–Marquardt algorithm. Other parameters such as the axes of the shape model can be set to be equal; i.e., a sphere is applied to substitute the unknown cellinoid in the first step. Additionally, as the brightness in the three synthetic light curves can be treated as absolute brightness in this application, the simple \(\chi ^2\) in (27) should be employed for simplicity.

Cellinoid Shape with axes \(a_1=6,a_2=4,b_1=5,b_2=3,c_1=3,c_2=3\) and its three synthetic light curves
Second, with the approximate period and initial phase angle, the Levenberg–Marquardt algorithm is employed to search for the best solution with various initial pole orientations \((\lambda ,\beta )\). If there is no prior information about the pole, a multi-grid search is required, such as a search that discretizes \(\lambda\) from \(0^\circ\) to \(360^\circ\) with increments of \(10^\circ\) and \(\beta\) from \(-90^\circ\) to \(90^\circ\) with increments of \(10^\circ\). Here it should be noted that \(\beta\) in astronomy is (\(-90^\circ\, \text{to}\, 90^\circ\)), but it should be changed to the polar angle \(90^\circ -\beta \in (0^\circ\, \text{to}\,180^\circ)\) in computation. The solution with the smallest \(\chi ^2\) is a good guess of the parameters of the pole orientation.
Finally, using the appropriate guesses of period, initial phase angle and pole orientation, the six parameters of the cellinoid shape are searched for using the Levenberg–Marquardt algorithm again with various guess values.

Searching rotation period \((P)\) and fitted light curves denoted by ‘–’
With the three steps to model the synthetic light curves with random noise, the fitted shape parameters are \(a_1= 6.0616, a_2=4.0377, b_1=5.0388, b_2=3.0088, c_1=2.9734\), and \(c_2=2.9767\). The pole orientation is \((54.0367^\circ,\,-17.0233^\circ )\) and the rotation period is \(6.9974\) h with the initial phase angle \(\varPhi _0 = 45.0960^\circ\). The fitted parameters are close to the initial values (within 1 % error) and the fitted light curves are shown as lines in Fig. 4, while ‘*’ symbols denote the synthetic light curves corrupted by Gaussian noise. Additionally, the searching process for the good guess of the rotation period \((P)\) is shown in Fig. 4. It is apparent that the guess value is close to the specific value of \(P\). This shows that the rotation period can be fitted accurately even though the light curves are corrupted by noise.
With the previous described process to search the related physical parameters of an ideal asteroid, the cellinoid shape model can perform well to derive the correct parameters. That could make the cellinoid shape model extended to the application of real asteroids confidently.
3.2 Application to 3 Juno
From the previous application to an ideal cellinoid, important results guide us in the inversion for real asteroids. We employ the cellinoid shape model to derive the related parameters of 3 Juno from its three light curves in one apparition. Furthermore, we compare the fitted results with results derived using the fast method based on an ellipsoid model, presented by Lu et al. (2013). Three selected light curves were observed continually from the 18th to the 20th of April 1985 Birch and Taylor (1989). Generally, the variation in the position of both the Earth and Sun in one observed light curve is very small for 3 Juno, resulting in a small variation in the solar phase angle \(\alpha\). Consequently, the solar phase function \(f(\alpha )\) in the scattering function (22) can be neglected to make the computation easier. Considering the measurement error, the brightness in observed light curves is relative. Therefore, the relative form of \(\chi ^2\) in (28) is applied for the real asteroids.
In a similar process, the rotation period \((P)\) with a value of \(7.1996\pm 0.0011\) and the shape with axes \(a_1=6.2520,\, a_2=6.3484,\, b_1=4.0398,\, b_2=5.5581,\, c_1=6.0533\), and \(c_2=3.3598\) are derived, following the pole orientation of \((223.42^\circ,\,7.1996^\circ )\). Meanwhile, the related parameters are derived employing the fast method as a period \(P=7.1983 \pm 0.0055\), three semi-axes of the ellipsoid model \(a=1.2800,\, b=1.0214\), and \(c=0.9771\) and pole orientation \((275.37^\circ,\,78.45^\circ )\). Additionally, Cellino et al. (2009) obtained the related parameters of 3 JUNO employing a genetic inversion method from sparse photometric data. The physical parameters of 3 JUNO derived using the three different methods are listed in Table 1. Although it makes no sense, we still present the axis ratio \((a/c,\,b/c)\) of the cellinoid shape model in Table 1 by simply setting \(a,\,b,\,c\) as the mean of two different semi-axes. Additionally, Ďurech published their fitted solution of 3 Juno obtained employing Kaasalainen’s method with the pole orientation \((103^\circ,\, 27^\circ )\) and rotation period \(P=7.2095\)Durech et al. (2010). As mentioned previously, Kaasalainen’s method employs a convex shape model to simulate the surface of asteroids, relying on many light curves observed in various geometries.
As seen in Table 1, all four methods derive almost the same fitted rotation period, which confirms that the rotation period of asteroids can be found even with a simple-shape model, as described by Kaasalainen and Durech (2007), Cellino et al. (2009). Nevertheless, the fitted pole orientation of the cellinoid method deviates from the fitted values of Cellino and Ďurech. A main reason is that the light curves exploited in the cellinoid method are for <2 days. Correction of the fitted parameters of the pole orientation requires more light curves to be observed in various geometries. Fortunately, the rotation period can be well searched for using only several continuously observed light curves employing this method. By applying the cellinoid shape model, we can quickly search for the periods of a tremendous number of found asteroids in a low-cost computation using a small number of observed light curves. Besides, with only one observing circumstance of an asteroid, the cellinoid shape model could find a similar pole orientation, which is important to learn the physical features of an asteroid when it was observed for the first time.

Observed light curves (‘*’) and two fitted light curves (lines) generated by different shape model (Left: cellinoid shape Right: ellipsoid shape)
In Fig. 5, two fitted light curves (drawn as lines) compare the results obtained with the cellinoid shape and ellipsoid shape with observed light curves indicated by ‘*’ symbols. The asymmetric shape of the cellinoid better simulate the light curves with different extrema than the symmetric shape of the ellipsoid. With only three more parameters, the cellinoid shape model can be used to simulate asteroids with asymmetric shape by easily extending the algorithm based on the ellipsoid shape model. As seen in Fig. 5, the cellinoid shape fits the three observed light curves well, especially at the different extrema, while the ellipsoid shape model generates the same extrema for one light curve.
3.3 Application to 21 Lutetia
The cellinoid shape model is employed to simulate the real asteroid 21 Lutetia. The applied three light curves were observed on the 15th and the 16th of March 2010 Carry et al. (2010). The rotation period is found to be \(P=8.1620 \pm 0.0012\) with \(\varPhi _0=281.0541^\circ\), and the shape parameters are \(a_1=2.7009,\,a_2=2.5472,\, b_1=4.4315,\, b_2=4.4115,\, c_1=2.7663\), and \(c_2=2.4757\) with pole orientation \((67.1245^\circ,\, {-}10.8486^\circ )\). The fitted light curves are shown in Fig. 6. The cellinoid shape well fits the observed light curves and well simulate the different extrema. The best-fit period is also consistent with the period \(P=8.1682\) published by Ďurech et al. (2010), although the pole orientation differs from their pole orientation \((54^\circ,\, {-}7^\circ )\).
Figures 5 and 6 show that the cellinoid shape model performs well in simulating real asteroids and the rotation period can be fitted accurately with the light curves of one apparition using the cellinoid shape. Unfortunately it is difficult to correctly fit the pole orientation of asteroids using light curves of one apparition. Instead, the cellinoid shape model can be employed to obtain an accurate rotation period and a rough estimation of the pole orientation from light curves of one observing circumstance. As observed light curves are collected more and more, Kaasalainen’s method can be invoked to refine the pole orientation and generate a convex shape model with an arbitrary surface.

Fitted light curves of 21 Lutetia
4 Conclusions and Discussions
A general shape model obtained by combining eight octants from eight different ellipsoids, named the cellinoid, is employed in this article. By employing this shape model in the inverse problem of searching for the physical parameters of asteroids, an efficient method is presented with the simple extension of the fast method based on the ellipsoid shape model. Numerical application confirms that the cellinoid shape model efficiently derives the related parameters, not only for synthetic light curves but also for the observed light curves of real asteroids. In particular, the cellinoid shape model can be used to find the rotation period with high accuracy from several light curves observed in one apparition of the asteroid.
In this article we primarily illustrated how to obtain the parameters from several light curves observed in one apparition by employing the cellinoid shape model. Recently, the Minor Planet Center (MPC) has built a database to collect the calibrated magnitudes of asteroids Warner et al. (2009). In future work we want to test the performance of the cellinoid shape model in exploiting the data from the MPC. Compared with the uncalibrated data we used, the data of the MPC might be more reliable and the parameters might be fitted more accurately. Additionally, the full light curves in a long epoch cannot be collected at will; even the latest space missions, such as GAIA, collect only sparse photometric data. We also plan to test the cellinoid shape model for sparse data in the future.
Furthermore, we want to apply different scattering laws, not only the formula in (22), to compare their performance in simulating the reflection of light. Although the variation in brightness is mainly determined by the shape, a proper scattering law is still important to the inverse problem. In particular, a good-fit scattering law is important for the modeling of sparse data and calibrated data.
References
P. Birch, R. Taylor, Lightcurves and pole position of asteroid 3 juno. Astron. Astrophys. Suppl. Ser. 81, 409–414 (1989)
B. Carry, M. Kaasalainen, C. Leyrat, W. Merline, J. Drummond, A. Conrad, H. Weaver, P. Tamblyn, C. Chapman, C. Dumas et al., Physical properties of the esa rosetta target asteroid (21) lutetia. Astron. Astrophys. 523, A93 (2010)
A. Cellino, D. Hestroffer, P. Tanga, S. Mottola, A. Dell’Oro, Genetic inversion of sparse disk-integrated photometric data of asteroids: application to Hipparcos data. Astron. Astrophys. 506(2), 935–954 (2009)
A. Cellino, V. Zappalà, P. Farinella, Asteroid shapes and lightcurve morphology. Icarus 78(2), 298–310 (1989)
B. Hapke, Bidirectional reflectance spectroscopy: 3. Correction for macroscopic roughness. Icarus 59(1), 41–59 (1984)
M. Kaasalainen, J. Durech, Inverse problems of NEO photometry: Imaging the NEO population, in eds by G.B. Valsecchi, D. Vokrouhlický, A. Milani, IAU Symposium, vol. 236, pp. 151–166 (2007).
M. Kaasalainen, L. Lamberg, Interpretation of lightcurves of atmosphereless bodies. I-General theory and new inversion schemes. Astron. Astrophys. 259, 318–332 (1992)
M. Kaasalainen, L. Lamberg, Interpretation of lightcurves of atmosphereless bodies. II-practical aspects of inversion. Astron. Astrophys. 259, 333–340 (1992)
M. Kaasalainen, X. Lu, A. Vänttinen, Optimal computation of brightness integrals parametrized on the unit sphere. Astron. Astrophys. 539, A96 (2012)
M. Kaasalainen, J. Torppa, Optimization methods for asteroid lightcurve inversion I. shape determination. Icarus 153(1), 24–36 (2001)
M. Kaasalainen, J. Torppa, K. Muinonen, Optimization methods for asteroid lightcurve inversion II. The complete inverse problem. Icarus 153(1), 37–51 (2001)
S. Kaasalainen, M. Kaasalainen, J. Piironen, Ground reference for space remote sensing laboratory photometry of an asteroid model. Astron. Astrophys. 440, 1177–1182 (2005)
S. Kaasalainen, J. Piironen, M. Kaasalainen, A.W. Harris, K. Muinonen, A. Cellino, Asteroid photometric and polarimetric phase curves: empirical interpretation. Icarus 161, 34–46 (2003)
H. Karttunen, Modelling asteroid brightness variations. I-numerical methods. Astron. Astrophys. 208, 314–319 (1989)
H. Karttunen, E. Bowell, Modelling asteroid brightness variations. II-the interpretability of light curves and phase curves. Astron. Astrophys. 208, 320–326 (1989)
X. Lu, H. Zhao, Z. You, A fast ellipsoid model for asteroids inverted from lightcurves. RAA 13(4), 465–472 (2013)
K. Lumme, E. Bowell, Radiative transfer in surfaces of atmosphereless bodies. I Theory. Astron. J. 86, 1694–1704 (1981)
K. Lumme, E. Bowell, Radiative transfer in surfaces of atmosphereless bodies. II interpretation of phase curves. Astron. J. 86, 1705–1712 (1981)
K. Lumme, H. Karttunen, E. Bowell, A spherical harmonics method for asteroid pole determination. Astron. Astrophys. 229, 228–239 (1990)
K. Muinonen, A. Penttilä, A. Cellino, I.N. Belskaya, M. Delbò, A.C. Levasseur-Regourd, E.F. Tedesco, Asteroid photometric and polarimetric phase curves: joint linear-exponential modeling. Meteorit. Planet. Sci. 44(12), 1937–1946 (2009)
K. Muinonen, J. Piironen, S. Kaasalainen, A. Cellino, Asteroid photometric and polarimetric phase curves: empirical modeling. Memorie Della Società Astronomica Italiana-Journal of the Italian Astronomical Society 73, 716–721 (2002)
H. Russell, On the light-variations of asteroids and satellites. Astron. J. 24(5), 1–18 (1906)
A. Surdej, J. Surdej, Asteroid lightcurves simulated by the rotation of a three-axes ellipsoid model. Astron. Astrophys. 66, 31–36 (1978)
J. Durech, V. Sidorin, M. Kaasalainen, DAMIT: a database of asteroid models. Astron. Astrophys. 513, 46 (2010)
B.D. Warner, A.W. Harris, P. Pravec, The asteroid lightcurve database. Icarus 202(1), 134–146 (2009)
Acknowledgments
This work is funded under the Grant No. 019/2010/A2 from the Science and Technology Development Fund, MSAR. Haibin Zhao appreciates the support of the National Natural Science Foundation of China (Grant Nos. 10503013, 11078006 and 10933004) and the Minor Planet Foundation of Purple Mountain Observatory. We sincerely thank Prof. Wing for his recommendation of the cellinoid shape. Additionally, we want to thank Prof. Cellino for his vital advice on the cellinoid shape model.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lu, X., Zhao, H. & You, Z. Cellinoid Shape Model for Asteroids. Earth Moon Planets 112, 73–87 (2014). https://doi.org/10.1007/s11038-014-9439-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11038-014-9439-5