
Abstract
Boundary driven diffusive systems describe a broad range of transport phenomena. We study large deviations of the density profile in these systems, using numerical and analytical methods. We find that the large deviation may be non-differentiable, a phenomenon that is unique to non-equilibrium systems, and discuss the types of models which display such singularities. The structure of these singularities is found to generically be a cusp, which can be described by a Landau free energy or, equivalently, by catastrophe theory. Connections with analogous results in systems with finite-dimensional phase spaces are drawn.








Similar content being viewed by others

Notes
The paths which extremize S satisfy \(\partial_{t}\rho=\partial _{x}^{2}\rho+\partial_{x} ( \sigma\partial_{x}\hat{\rho} ) \) with \(\hat{\rho}=\nabla\phi_{\mathit{ext}}\).
The action \(S=\int dxdt\frac{ ( J+D\nabla\rho) ^{2}}{2\sigma}\) is quadratic in J, therefore the minimum of S over J is unique. The spectrum of δ 2 S/δJ 1 δJ 2 is gapped if σ(ρ) is bounded away from zero on the path ρ(x,t). This justifies the saddle-point approximation (i.e., higher order corrections to this equation are O(N 0)).
Referring to [10], the estimate for the LDF of the history which satisfies the symmetry did not take into account the possibility that all the mass transfer occurs at the middle point x=1/2.
This holds for models that satisfy the “Gradient Condition”, see [39].
Changing variables x′=2x,t′=4t,ρ′=ρ and J′=J/2, the continuity equation is unchanged and the transformed action Eq. (3) reads S′[ρ′,J′]=2S[ρ,J]. Clearly, the number of extrema of the action for a given ρ f is not affected by this change.
References
Arnold, V.I.: Russ. Math. Surv. 30, 1–75 (1975)
Berry, M.V., Upstill, C.: Prog. Opt. 18, 257–346 (1980)
Bertini, L., De Sole, A., Gabrielli, D., Jona-Lasinio, G., Landim, C.: Phys. Rev. Lett. 87, 040601 (2001)
Bertini, L., De Sole, A., Gabrielli, D., Jona-Lasinio, G., Landim, C.: J. Stat. Phys. 107 (2002)
Bertini, L., De Sole, A., Gabrielli, D., Jona-Lasinio, G., Landim, C.: Phys. Rev. Lett. 94, 030601 (2005)
Bertini, L., Gabrielli, D., Lebowitz, J.: J. Stat. Phys. 121, 843 (2005)
Bertini, L., De Sole, A., Gabrielli, D., Jona-Lasinio, G., Landim, C.: J. Stat. Mech. L11001 (2010)
Bodineau, T., Derrida, B.: Phys. Rev. E 72, 066110 (2005)
Bunin, G., Kafri, Y., Podolsky, D.: EPL 99, 20002 (2012)
Bunin, G., Kafri, Y., Podolsky, D.: J. Stat. Mech. L10001 (2012)
Derrida, B.: J. Stat. Mech. P07023 (2007)
Derrida, B., Lebowitz, J.L., Speer, E.R.: J. Stat. Phys. 107 (2002)
Dieterich, W., Fulde, P., Peschel, I.: Adv. Phys. 29 (1980)
Dorfman, J.R., Kirkpatrick, T.R., Sengers, J.V.: Annu. Rev. Phys. Chem. 45, 213–239 (1994)
Dykman, M.I., Millonas, M.M., Smelyanskiy, V.N.: Phys. Lett. A 195, 53 (1994)
Dykman, M.I., Luchinsky, D.G., McClintock, P.V.E., Smelyanskiy, V.N.: Phys. Rev. Lett. 77, 26 (1996)
Freidlinand, M.I., Wentzell, A.D.: Random Perturbations of Dynamical Systems. Springer, Berlin (1984)
Gardiner, C.W.: Handbook of Stochastic Methods for Physics, Chemistry, and the Natural Sciences. Springer, Berlin (1994)
Gilmore, R.: Catastrophe theory. In: Digital Encyclopedia of Applied Physics. Wiley, New York (2003)
Graham, R., Tél, T.: Phys. Rev. Lett. 52(2), 9–12 (1984)
Graham, R., Tél, T.: J. Stat. Phys. 35(5/6) (1984)
Graham, R., Tél, T.: Phys. Rev. A 31(2) (1985)
Graham, R., Tél, T.: Phys. Rev. A 33(2) (1986)
Hager, J.S., Krug, J., Popkov, V., Schütz, G.M.: Phys. Rev. E 63, 056110 (2001)
Hurtado, P.I., Garrido, P.L.: Phys. Rev. Lett. 107, 180601 (2011)
Jordan, A.N., Sukhorukov, E.V., Pilgram, S.: J. Math. Phys. 45, 4386–4417 (2004)
Katz, S., Lebowitz, J.L., Spohn, H.: J. Stat. Phys. 34(3/4) (1984)
Kipnis, C., Marchioro, C., Presutti, E.: J. Stat. Phys. 27, 65 (1982)
Le Doussal, P., Vinokur, V.M.: Physica C 254 (1995)
Luchinsky, D.G., McClintock, P.V.E., Dykman, M.I.: Rep. Prog. Phys. 61(8), 889–997 (1998)
Maier, R.S., Stein, D.L.: Phys. Rev. E 48(2), 931–938 (1993)
Maier, R.S., Stein, D.L.: Phys. Rev. Lett. 85, 1358 (2000)
Merhav, N., Kafri, Y.: J. Stat. Mech. P02011 (2010)
Moss, F., McClintock, P.V.E. (eds.): Noise in Nonlinear Dynamical Systems. Cambridge University Press, Cambridge (1989)
Press, W.H., Teukolsky, S.A., Vetterling, W.T., Flannery, B.P.: Numerical Recipes. The Art of Scientific Computing, 3nd edn. (2007)
Scheidl, S.: Z. Phys. B 97, 345–352 (1995)
Schulman, L.S., Revzen, M.: Collect. Phenom. 1, 43–49 (1972)
Spohn, H.: J. Phys. A: Math. Gen. 16, 4275 (1983)
Spohn, H.: Large Scale Dynamics of Interacting Particles. Springer, Berlin (1991)
Tailleur, J., Kurchan, J., Lecomte, V.: J. Phys. A: Math. Theor. 41, 505001 (2008)
Acknowledgements
We are grateful for discussions with B. Derrida, J. Kurchan, O. Raz and J. Tailleur. This research was funded by BSF and ISF grants, and by the European Union’s—Seventh Framework Programme (FP7/2007–2013) under grant agreement No. 276923—MC-MOTIPROX.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Calculating D(ρ) and σ(ρ) for the Driven Ising Model
As shown in [24, 39], for each parameter set (ε,δ) one can write implicit analytic equations for D(ρ) which can then be inverted numerically. Then σ(ρ) is obtained via the fluctuation-dissipation relation, σ(ρ)=2k B Tρ 2 κ(ρ)D(ρ) where κ(ρ) is the compressibility [11]. We note that the fact that the fluctuation-dissipation relation, derived originally in linear response, can be used in the calculations of LDF is non-trivial but by now well-established for boundary driven diffusive systems, see [3, 11, 26, 39, 40]. Intuitively, it may be understood from the weakness of the driving which scales as the inverse system size.
For equilibrium BCs this model admits an Ising measure. To find D(ρ), we use the relationFootnote 4
where χ=∑ i (〈n i n 0〉−ρ 2) (related to the compressibility κ(ρ) by χ=k B Tρ 2 κ(ρ)), j i,i+1 is the current (number of particles per unit time) from site i to site i+1. The averages are taken with respect to the equilibrium probability distribution, and 〈j i,i+1〉=〈j i,i−1〉 due to the symmetries in equilibrium. One then finds σ using
To calculate 〈j i,i+1〉 note that as the rates depend on the four sites around a bond, we have that

where P 0100 is the probability of the pattern 0100, and similarly for others. Using the transfer-matrix technique [24], one can calculate these probabilities and obtain
where
It remains to find ρ and κ, which are both given in terms of β (recall that exp(4β)=(1+ε)/(1−ε)), and h=βμ:

In order to obtain D(ρ),σ(ρ), we calculate σ(h),D(h) and ρ(h) for a wide range of h, and numerically invert the last to find D(ρ)=D(h(ρ)) and σ(ρ)=σ(h(ρ)). Figure 2(a) shows D(ρ) and σ(ρ) for (ε,δ)=(0.995,0.05).
As a check, we note that for the simple symmetric exclusion process [11] δ=ε=0, and one finds
and
so that D=1 and σ=2ρ(1−ρ) [11].
Appendix B: Existence of Multiple Extremal Solutions in the QS Model
In this appendix we prove that for the QS model, which has D=1 and σ(ρ)=ρ 2+1, and for any non-equilibrium BCs, there exists an LDS for some profiles. Here it will be far more convenient to work in the domain x∈[−1,1]. The results in the new domain are simply related to the results in the original domain.Footnote 5
The BCs to Eq. (6) are denoted by ρ −1≡ρ L and ρ +1≡ρ R .
Claim 1
For any BCs ρ −1≠ρ +1, there exists a profile ρ f (x) for which Eq. (6) is satisfied by more than one solution with g(±1)=ρ ±1.
Proof
Using the symmetries ρ→−ρ and x→−x it is enough to consider the case ρ −1<ρ 1, and 0<ρ 1.
We proceed by an explicit construction of ρ f . That is, given ρ ±1 we construct a function ρ f (x) for which Eq. (6) is satisfied by more than one function g(x), which also satisfies the boundary-conditions. The profile ρ f (x) will be a piecewise-constant function composed of two flat regions, of the form

where ρ A ,ρ B are (constant) numbers which specify ρ f (x), see Fig. 9. Note that ρ f (x) does not have to be continuous, nor to satisfy the BCs, hence ρ A ,ρ B are not restricted in any way. The solutions g(x) will be put together by solving Eq. (6) for x<0 and x>0 separately (each with its corresponding boundary condition), and matching the solutions by demanding that g(x) and g′(x) are continuous at x=0.

Density profile ρ(x) of the step form (Eq. (14)), and three g(x) solutions. Here ρ A =4,ρ B =−5,ρ −1=−2,ρ 1=3
For a region with constant \(\rho( x ) =\bar{\rho}\), and given g(x 1), Eq. (6) has an (implicit) analytic solution
where c 1 is a free constant. Differentiating both sides with respect to x we find
and using Eq. (15) for c 1, g′(x) reads
Note that c 1 no longer appears in this equation. Instead, this is a relation between g(x) and g′(x). Let g A (x) be the solution given in Eq. (15) with x 1=−1, g(x 1)=ρ −1 and \(\bar{\rho}=\rho_{A}\):
for −1<x<0. This defines a one-parameter family of solutions, according to the value of c A . Similarly, g B (x) is defined by
for 0<x<1. Any solution of Eq. (6) with ρ(x) of the step form defined in Eq. (14) is composed of solutions g A (x),g B (x) satisfying g A (0)=g B (0) and \(g_{A}^{\prime} ( 0 ) =g_{B}^{\prime} ( 0 ) \). The derivatives at x=0 are given by
We note that:
-
(a)
g′(x) does not change sign. As we are interested in solutions with ρ −1<ρ 1, we only need to consider solutions with g′(x)≥0.
-
(b)
From (a) it follows that ρ −1≤g A (0)=g B (0)≤ρ 1.
-
(c)
It also follows that if g A (0)=ρ −1 then \(g_{A}^{\prime} ( 0 ) =0\), and if g B (0)=ρ 1 then \(g_{B}^{\prime} ( 0 ) =0\). Similarly, if g A (0)=ρ 1 then \(g_{A}^{\prime} ( 0 ) >0\), and if g B (0)=ρ −1 then \(g_{B}^{\prime} ( 0 ) >0\).
Consider now \(g_{A}^{\prime} ( 0 ) \) and \(g_{B}^{\prime} ( 0 ) \) as a function of g(0). A solution g(x) on the entire segment [−1,1] is obtained when \(g_{A}^{\prime} ( 0 ) =g_{B}^{\prime} ( 0 ) \) for the same g(0). Remark (c) ensures that they cross at least once; But they may also cross more than once, see Fig. 10. The number of crossings depends on ρ A ,ρ B . We will show that there always exist ρ A ,ρ B for which the graphs cross more than once.

\(g_{A}^{\prime} ( 0 ) \) and \(g_{B}^{\prime} ( 0 ) \) plotted as functions of g(0) for two functions ρ(x). In the upper panel the graphs cross only once, indicating a single g(x)-solution. In the lower panel, done with parameters of Fig. 9, they cross three times, resulting in three different g-solutions. (Note that the g-values at these crossings indeed correspond to g(0) of the solutions in Fig. 9.) BCs for both panels are ρ −1=−3,ρ +1=5. Upper panel: ρ A =3,ρ B =−2, lower panel: ρ A =4,ρ B =−5
Motivated by the fact that the cusp singularities always appear at the lower right corner of our phase-space cross-sections, we consider the limit where ρ A is a large positive number, and ρ B ≃−ρ A .
Denote by \(g_{A}^{\prime} [ g ( 0 ) ;\rho_{A};\rho _{-1} ] \) the value of \(g_{A}^{\prime} ( 0 ) \) as a function of g(0),ρ A and ρ −1 , and similarly \(g_{B}^{\prime} [ g ( 0 ) ;\rho_{B};\rho_{1} ] \). The analysis which follows is done for \(g_{A}^{\prime} ( 0 ) \); similar results are obtained for \(g_{B}^{\prime} ( 0 ) \) since \(g_{B}^{\prime} [ g ( 0 ) ;\rho_{B};\rho_{1} ] =g_{A}^{\prime} [ -g ( 0 ) ;-\rho_{B};-\rho_{1} ] \). To better understand \(g_{A}^{\prime} [ g ( 0 ) ;\rho_{A};\rho_{-1} ] \) at large ρ A , we plot \(g_{A}^{\prime} [ g ( 0 ) ] \) for ρ A =100 and different ρ −1 values, see Fig. 11. As can be seen, the different graphs rise quickly from \(g_{A}^{\prime} ( 0 ) =0\) at g(0)=ρ −1, and join a common function. This is formulated by the following lemma:

\(g_{A}^{\prime} [ g ( 0 ) ;\rho_{A}=100;\rho _{-1} ] \) for different ρ −1. Gray line: large ρ-expansion, Eq. (21)
Lemma 2
Expanding around ρ A →∞, we have for any g(0)>ρ −1
Proof
Rewrite Eq. (20) for \(g_{A}^{\prime} ( 0 ) \) as
where here and in the next equation g stands for g A (0). For ρ A →∞ a saddle-point approximation can be preformed. The exponent \(-\rho_{A} [ \operatorname{atan}\phi-\operatorname {atan}\psi] \) is dominated by small values of g−ψ, i.e. close to the upper bound of the integral, and \(\operatorname{atan}\phi -\operatorname {atan}\psi\) can be expanded to second order
In addition, the denominator (1+ψ 2)−1/2 is expanded to second order around g. The resulting expression involves Gaussian integrals which can be integrated, with the lower integration limit set to −∞. Finally, we expand the result (containing error-functions, etc.) to second order in 1/ρ A around ρ A →∞, and obtain Eq. (21). □
The expression in Eq. (21) does not depend on ρ −1, as expected from the reasoning alluding to Fig. 11. Similarly, for \(g_{B}^{\prime} [ g ( 0 ) ;\rho_{B};\rho_{1} ] \) we have, for ρ B →−∞,
We are now in a position to construct ρ f (x) with three solution to g: given the BCs, choose some crossing value g c ∈(ρ −1,ρ 1) (this is where the non-equilibrium condition ρ −1≠ρ 1 enters). For a given ρ A the condition \(g_{A}^{\prime} [ g_{c};\rho_{A};\rho_{-1} ] =g_{B}^{\prime} [ g_{c};\rho_{B};\rho_{1} ] \), together with Eqs. (21), (22) reads, to second order in \(\rho_{A}^{-1},\rho_{B}^{-1}\),
or
Solving this for ρ B we find
Fixing g c , the expansions Eqs. (21), (22) guarantee that as ρ A grows, with ρ B given by Eq. (25), a crossing point will appear in a neighborhood of g c , and approach g c for ρ A →∞. The root of the quadratic equation leading to Eq. (25) was chosen so that \(g_{A}^{\prime },g_{B}^{\prime }\) will cross from \(g_{A}^{\prime} [ g ] >g_{B}^{\prime} [ g ] \) for g<g c , to \(g_{A}^{\prime} [ g ] <g_{B}^{\prime} [ g ] \) for g>g c , see Fig. 12. This, together with \(g_{A}^{\prime} [ \rho_{-1};\rho_{A};\rho_{-1} ] =0\) and \(g_{B}^{\prime} [ \rho_{1};\rho_{B};\rho_{1} ] =0\), guarantees that the functions \(g_{A}^{\prime} [ g;\rho_{A};\rho_{-1} ] \) and \(g_{B}^{\prime} [ g;\rho_{B};\rho_{1} ] \), will have two crossing points in addition to the crossing point near g=g c . For large ρ A these will be at values of g close to ρ −1 and ρ +1, see Fig. 12. □

Constructing a solution. Choose a crossing value g c (here g c =−1) and some large ρ A . ρ B is fixed so that the crossing is approximately at g c (upper panel). The full solutions will feature this crossing with two more crossings, close to the boundaries
Appendix C: Cusp Structure and Hessian Spectrum in the QS Model
In this appendix we study the cusp structure, and the spectrum of the Hessian matrix H at \(\rho_{f}^{\mathit {cusp}}\), for the QS model. First, we prove that for the QS model with profiles defined as in Appendix B, the framework of catastrophe theory is applicable. More precisely, there exists an analytical function F(ρ A ,ρ B ) on the two-dimensional cross-section parametrized by (ρ A ,ρ B ) as in Appendix B, and for which every extremum of F corresponds to a single extremal history leading to ρ f (ρ A ,ρ B ), as defined in Eq. (14).
To construct the function F, we note that Eqs. (20) give us analytical expressions \(g_{A}^{\prime} ( 0 ) =f_{A} ( g_{0},\rho_{A},\rho_{B} ) \) and \(g_{B}^{\prime} ( 0 ) =f_{B} ( g_{0},\rho_{A},\rho_{B} ) \). We drop the ρ −1,ρ 1 dependence, which are kept fixed. Let
F(ϕ 0;ρ A ,ρ B ) is analytic in all its variables, and F(g 0;ρ A ,ρ B )=0 iff the solution g is an extremal solution. Moreover, in the vicinity of the cusp, ∂F/∂g 0=0 iff F(g 0;ρ A ,ρ B )=0, i.e. is a local minimum as a function of g 0. Therefore F acts as a “gradient map” (in the sense of Catastrophe Theory), with ρ A ,ρ B the control variables, and g 0 the state variable. Accordingly, the cusp structure (regions in (ρ A ,ρ B ) where F(g 0)=0 has two solutions) is expected to be mean-field.
To show how F is used, we briefly review the argument for the cusp structure, which is essentially a Landau mean-field argument. The cusp point is a special point \(( \rho_{A}^{\mathit {cusp}},\rho_{B}^{\mathit {cusp}} ) \) where at the minimal g 0, \(\partial^{2}F/\partial g_{0}^{2}=0=\partial ^{3}F/\partial g_{0}^{3}\) hold (the two conditions explain why it is a point, or a set of isolated points, in the (ρ A ,ρ B ) plane). Let \(x_{A,B}=\rho_{A,B}-\rho_{A}^{\mathit {cusp}}\). In the vicinity of the cusp, expand F to forth-order (here the analyticity is crucial), \(F=\alpha g_{0}^{4}+\beta g_{0}^{3}+\gamma g_{0}^{2}+\delta\), where α,β,γ,δ depend on x A,B . We assume that α≠0; vanishing α would be non-generic, i.e., could be remedied by a small change in any additional parameters, such as the BCs ρ −1,ρ 1 or the noise function σ. Then a local change of variables can be performed to bring F to the form \(F=\frac{1}{4}g_{0}^{4}+ag_{0}^{2}+b\), where at the cusp a=0=b. The region where F has two local minima is bounded by \(b=\pm \frac{2}{3^{3/2}}a^{3/2}\). Near the cusp a,b can be expanded to first order in x A,B , so the power-law relation between b∝±a 3/2 will apply to a rotated frame of x A,B .
3.1 C.1 Spectrum
As discussed in the main text, for the “Landau mean-field”, catastrophe theory to hold, one must have a gap in the spectrum of the Hessian H. This can be tested numerically, by evaluating the action S for the extremal solution ρ(x,t) leading to ρ f (x), and calculating the Hessian, Eq. (12), by varying ρ jointly at pairs of points (x 1,t 1) and (x 2,t 2). The eigenvalues of H can then be calculated for different ρ f profiles close to ρ f =ρ cusp .
To calculate H one thus needs to locate ρ cusp . This is most easily done for the QS model with BCs ρ L =−ρ R , where ρ cusp of the form of Eq. (7) must have α 1=0. Figure 13 shows the bottom of the spectra of H for different ρ f , starting from \(\bar{\rho}\) and ending at ρ cusp . One can clearly see a single eigenvalue going to zero, in agreement with the analysis in the paper. The rest of the eigenvalues remain away from zero, without closing the gap. This validates the analysis carried out in the main text for the QS model.

Bottom of Hessian spectrum for the QS model at different ρ f profiles, equally spaced between \(\bar{\rho}\) (leftmost) to \(\rho _{f}^{\mathit {cusp}}\) (rightmost). BCs are ρ L =−3,ρ R =3. A single eigenvalue approaches zero, while the gap above it is maintained
Appendix D: Cusp Structure in the BDI Model
In this appendix we check the validity of Eq. (9), which predicts the structure of the cusp. In the BDI model the diagonalization of the Hessian H gave inconclusive results. We suspect that this is due to the difficulty of locating ρ cusp with high precision in this model. As we show now, the predictions of Sect. 4 hold only very close to \(\rho_{f}^{\mathit {cusp}}\), when \(\Vert \rho_{f}-\rho _{f}^{\mathit {cusp}}\Vert <10^{-2}\).
To compare Eq. (9) with numerics, it is more convenient to use a different form, which does not require knowing the precise position of \(\rho_{f}^{\mathit {cusp}}\). Noting that s (a,0)(Δ)=s[ρ 1] and s (a,0)(−Δ)=s[ρ 2], we find that \(\Delta\propto \sqrt{a}\). Therefore we expect that for b=0
where y=q/Δ.
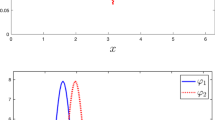
As an example we consider the boundary-driven Ising model, with (ε,δ)=(0.05,0.995) and ρ L =0.2,ρ R =0.8. Examples of pairs of locally minimizing histories leading to configurations on the switching line are shown in Fig. 14.

Pairs of locally minimizing histories, leading to points on the switching line (solid and dashed lines). The history leading to \(\rho _{f}^{\mathit {cusp}}\) (circle) is also plotted (bold line)
Figure 15(a) shows the function [s q (Δ)−s q=0(Δ)]/Δ4 as a function of y at a∼10−2, together with a quartic fit, which shows clear deviations from this form. This means that even at this distance \(\rho_{f}-\rho_{f}^{\mathit {cusp}}\sim10^{-2}\) there are significant contributions of higher powers to S q . Due to these higher powers plotting [s q (Δ)−s q=0(Δ)]/Δ4 vs. y for different a values in the range 5⋅10−3≤a≤0.2 does not collapse the data as expected. We therefore fit the functions s q (Δ)−s q=0(Δ) to polynomials of order four and higher, and plot c 4, the prefactor of q 4, as a function of Δ2, see Fig. 15(b). The expected power-law is not obtained for a quartic fit, but improves when the fits include higher order terms, see Fig. 16(a). This means that c 4 in Eq. (9) can indeed be taken to be constant. Finally, one can also fit \(s_{q} ( \Delta) -s_{q=0} ( \Delta) \propto a^{2} ( \frac{1}{4}y^{4}+\frac{c}{2}y^{2} ) \), by fitting the position of \(\rho_{f}^{\mathit {cusp}}\), see Fig. 16(b).

(a) The function S q (Δ)−S q=0(Δ)/Δ4 as a function of y at a=0.012 (solid line). A clear deviation is seen from a fit to a quartic function (dashed line). (b) The function S q (Δ)−S q=0(Δ)/Δ4 for different values of a (dashed lines). Fitting the functions to a polynomial of power 8, and plotting only the quartic part, the collapse improves significantly (solid lines)

Fits of c 4. (a) c 4 as a function of Δ2. (b) c 4 as a function of a. Guidelines (dashed lines) represent the expected slope of the functions. Extracting c 4 from fits that also include higher powers one obtains data that better fits the expected slope
The presence of strong higher powers as close as a∼10−2, see e.g. Fig. 16(b), can be understood as follows: the non-linear terms come from the different action at the two paths ρ 1 and ρ 2. As the distance Δ between them, scales as \(\Delta\propto\sqrt{a}\), ρ 1−ρ 2 at some space time point, can be of order 10−1 even for a∼10−2, and the two minimizing paths can see very different behaviors of D(ρ),σ(ρ) along the paths. This sensitivity explains why computing H directly is difficult: one needs Δ to be small, but as a∝Δ2, one needs the distance a from \(\rho_{f}^{\mathit {cusp}}\) to be very small.
From the above we conclude that at the cusp there is a soft mode, a direction along which the minimizing history ρ cusp(x,t) has a zero second derivative: d 2 s[ρ cusp(x,t)+qu a=0(x,t)]/dq 2=[d 2 s q /dq 2] a=0=0. This is indirect evidence that H has at least one vanishing eigenvalue.
Rights and permissions
About this article
Cite this article
Bunin, G., Kafri, Y. & Podolsky, D. Cusp Singularities in Boundary-Driven Diffusive Systems. J Stat Phys 152, 112–135 (2013). https://doi.org/10.1007/s10955-013-0752-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10955-013-0752-6